Заявляемое изобретение относится к устройствам автоматической раздачи сыпучих продуктов и может использоваться в сельском хозяйстве, например, для разведения рыб или в аквариумах.
Из уровня техники известна система раздачи корма (патент US6779486B2, ”Automatic animal feeder”, опубл. 24.08.2004), содержащая мобильный кормораздатчик, разгрузочный желоб, датчик заполнения, разбрасыватель корма, тензодатчики, датчики уровня кормовых отсеков Мобильный кормораздатчик содержит, по меньшей мере, два кормовых отсека, два дозирующих устройства, связанных с отсеками для корма, два двигателя, соединенные с приводами дозирующих устройств, контроллер для управления двигателями, контроллер для выгрузки требуемого количества корма. Каждое дозирующее устройство подает ингредиент корма в разгрузочный желоб. Датчик заполнения подключен для подачи сигнала полного заполнения на контроллер, при этом контроллер выполнен с возможностью прекращения работы раздаточных устройств при получении сигнала полного заполнения. Каждое раздаточное устройство содержит шнек, а каждый двигателей содержит управляемый компьютером привод с регулируемой скоростью. Мобильный кормораздатчик подвешен к подвесной направляющей посредством подвески и ролика. Приводной ролик находится на первом конце опорной балки, которая шарнирно прикреплена к узлу подвески между первым и вторым концами опоры балки, а кормовые отсеки подвешены ко второму концу опорной балки. Один или несколько тензодатчиков соединены для генерирования сигнала, указывающего общий вес ингредиентов корма в первом и втором отсеках. Мобильный кормораздатчик содержит два узла подвески, каждый из которых перемещается по подвесной направляющей, а кормовые отсеки подвешены к каждому из двух узлов подвески с помощью элемента, который включает в себя тензодатчик. Описанное устройство имеет ряд недостатков. Расположение тензодатчиков по бокам бункера в количестве двух штук не обеспечивает точное взвешивание, и, соответственно, корм распределяется неравномерно, так как наличие двух точек опоры из законов геометрии не является устойчивым. Также сам узел тензодатчика кажется крайне неустойчивым к заклиниванию и перекашиванию бункера, что может привести к недостоверным показаниям взвешивания. Использованный в конструкции устройства шнек давит и крошит корм, чем приводит его в негодность для потребления рыбой. В целом конструкция устройства является сложной и, следовательно, не достаточно надежной. Кроме того, в конструкции устройства использовано только два тензодатчика, которые взвешивают всё устройство целиком, но не массу содержимого в каждом отсеке/бункере. Таким образом, отсутствует возможность дозировать корм весовым методом из каждого отсека/бункера, что лишает устройство преимущества использования тензодатчиков. Кроме того, в устройстве отсутствует возможность его автономного питания, а также нет резервного источника энергии.
Известна автоматическая кормораздаточная система (патент CN109220947A, “Automatic feeding system for track type indoor breeding feeders”, опубл. 18.01.2019), верхняя часть которого снабжена направляющим рельсом, который снабжен передаточными колесами, а передаточные колеса соединены с электродвигателем. Нижняя часть передаточных колес соединена с питателем, содержащим множество смежных бункеров для корма. Внутренние части передаточных колес соединены с электродвигателем. Внутри бункеров установлены датчики силы тяжести, а днища бункеров снабжены электрическими клапанами и выпускными отверстиями. Рядом с направляющей верхней части каждого питателя расположен датчик приближени. Питатель снабжен системой управления и тормозным устройством. Система управления находится в сигнальной связи с датчиками силы тяжести, электродвигателем, электрическими клапанами и датчиками приближения. Система управления получает сигнал от датчика приближения по мере приближения бункера и запускает тормозное устройство. Недостатком системы является то, что выгружной электроклапан не обеспечивает равномерную выгрузку корма. Кроме того, корм в данной системе может слеживаться, образуя пробки или вообще не высыпаться из бункера, так как перемешивающее устройство никаким образом не влияет на лежащий в бункере корм. Этот недостаток является критичным для разведения рыб, так как в цехах рыбных ферм повышена влажность, что приводит к слеживанию корма, не позволяя ему высыпаться без ротора или прочих перемешивающих приспособлений. Также конструкция описанной системы сложна и недостаточно надежна. Конструкция аналога подвержена перекосу, так как крепление осуществлено только к одной очке опоры, а масса корма распределена неравномерно в отсеках / бункерах устройства. По этой причине возникает сильное искажение показаний датчиков веса, а также затруднение (или невозможность) высыпания корма, вследствие чего может возникнуть заклинивание движущих колес и движение устройства по монорельсу может быть блокировано. Конструкцией устройства не предусмотрено наличие рассеивателя, в связи с чем распределение корма происходит не равномерно. Кроме того, в устройстве отсутствует возможность его автономного питания, а также нет резервного источника энергии.
Наиболее близким к заявляемому решению является робот-кормораздатчик, производства компании Arvo-Tec (см. https://www.integrated-aqua.com/custom-products/robot-feeders и https://pentairaes.com/media/docs/Arvo-Tec%20RobotFeeder.pdf), который устанавливается над ёмкостью/ёмкостями с объектами аквакультуры на направляющий рельс и свободно перемещается в процессе раздачи корма. При раздаче корма робот или останавливается в нужных точках или двигается по всей длине рельса, обеспечивая большой охват площади поверхности. Одновременно робот может перевозить до 4 бункеров с кормом, раздавая разные смеси с размером гранул до 8 мм ∅. Перед каждым циклом кормления робот возвращается на свою домашнюю станцию для подзарядки аккумулятора и пополнения своих бункеров. Робот подключен к электронному блоку управления Arvo-Tec BASE, который представляет собой полностью интегрированную систему кормления, измерения, управления освещением и сигнализацией. Робот взаимодействует с блоком управления по радиосвязи. Блок управления использует температуру воды, содержание кислорода и биомассу в качестве исходных данных, а затем регулирует кормление в соответствии с математической моделью потребности в энергии, которую настраивает пользователь. Блок управления позволяет управлять роботами в количестве до 3 штук и максимальной длиной рельса до 450 метров на одного робота. Опционально конструкция робота может включать электрические разбрасыватели Arvo-Tec LD (легкий) и HD (сверхмощный). Питание аккумулятора осуществляется от источника постоянного тока между циклами раздачи корма. Конструкция устройства также включает оптический датчик для избегания столкновения с препятствием. Основным недостатком описанного решения является использование принципа объемного дозирования, который приводит к недостаточно точной раздаче сыпучих продуктов (в частности, корма). Кроме того, при использовании робота-кормораздатчика отсутствует возможности автоматически контролировать и оповещать оператора о любых нарушениях / сбоях / ошибках дозирования, что приводит к нестабильности всего процесса рыбоводства. Также в устройстве отсутствует возможность его автономного питания, а также нет резервного источника энергии.
Задача, на решение которой направлено заявляемое изобретение, заключается в использовании комбинации весового и объемного методов дозирования в процессе раздачи сыпучих продуктов, а также в совершенствовании системы питания устройства.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении точности дозирования сыпучих продуктов при использовании объемных методов дозирования, а также снижении показателей аварийности технологического процесса раздачи сыпучих продуктов.
Технический результат достигается использованием автоматического весового передвижного раздаточного устройства для сыпучих продуктов, состоящего из рамы, во внутреннем пространстве которой зафиксирован, по меньшей мере, один бункер, содержащий нижнее отверстие, к которому подсоединен питатель, в верхней части рамы установлены каретки, причем питатель и каретки содержат электроприводы, подключенные к шкафу управления, установленному на раме и связанному по каналу связи с персональным компьютером. Бункер зафиксирован в раме посредством бандажа, на поверхности которого вокруг бункера равноудаленно закреплены три узла тензодатчиков так, что опоры тензодатчиков зафиксированы на раме, каждый узел тензодатчика подключен к шкафу управления, при этом шкаф управления содержит магнитный токосъемник и аккумулятор. Раздаточное устройство может содержать рассеиватель, к которому через рукав подсоединен упомянутый питатель, причем рассеиватель содержит электропривод, соединенный со шкафом управления. Упомянутые каретки могут быть подсоединены к раме через вращающиеся втулки.
Сущность заявляемого технического решения поясняется фигурой, на которой изображен эскиз раздаточного устройства.
Цифрами обозначены:
1 - рама,
2 - бункер,
3 - бандаж,
4 - узел тензодатчика,
5 - питатель,
6 - каретка тельфера ведущая,
7 - каретка тельфера ведомая,
8 - рассеиватель,
9 - шкаф управления,
10 - рукав.
Раздатчик состоит из рамы 1, на противоположных краях верхней поверхности которой установлены каретки 6 и 7, которые в свою очередь закреплены на подвесном монорельсе (например, на двутавровой балке) в цехе предприятия, в котором осуществляется раздача сыпучего продукта. Каретки 6 и 7 прикреплены к раме 1 посредством вращающихся втулок таким образом, что обеспечено свободное вращение кареток 6 и 7 относительно рамы 1, что позволяет ей двигаться по криволинейному монорельсу (с радиусом изгиба более 1 м). Одна из кареток 6 и 7 или обе являются ведущими. Во внутреннем пространстве рамы 1 к её боковым стойкам закреплен как минимум один бандаж 3, в который вставлен бункер 2. По своей конструкции бандаж 3 позволяет использовать бункеры 2 разных по высоте размеров и, следовательно, объемов. Внутри рамы 1 может быть установлено рядом друг с другом несколько бункеров 2 и, соответственно, несколько бандажей 3 (по одному бандажу на каждый бункер). На фигуре проиллюстрирована конструкция раздатчика с двумя бункерами 2. В нижней части бункеров 2 расположены отверстия, соединенные с питателями 5 роторного типа, которые через рукава 10 подсоединены к рассеивателю 8 с крыльчаткой внутри. Верхний воротник питателя 5 легко крепится винтами к любому конусному бункеру для более гибкого применения и более быстрого монтаж изделия питателя 5. Форма питателя 5 подобрана с учетом угла наклона, рассчитанного исходя из максимально эффективной скорости истекания субстрата для избегания застойных зон. Наличие рукавов 10 обеспечивает одновременное использование нескольких (более одного) бункеров 2 с одним рассеивателем 8, тем самым упрощая конструкцию раздатчика, и, следовательно, делая ее более эффективной, надёжной и легкой по весу, что облегчает нагрузку на монорельс и расширяет возможность использования устройства. В точках соприкосновения рамы 1 и бандажа 3 установлены узлы тензодатчиков 4, каждый из которых представляет собой тензадатчик, который крепится к бандажу 3, и опору тензодатчика, которая крепится к раме 1. Конструкция устройства содержит узлы тензодатчиков 4 из расчета три узла на один бункер, что является оптимальным количеством для равномерного распределения нагрузки в соответствии с известными геометрическими законами. Узлы тензодатчиков 4 расположены по кругу бункера 2 на равном расстоянии друг от друга и подключены с помощью кабеля к шкафу управления 9. Питатели 5, каретки 6 и 7, рассеиватель 8 содержат электроприводы, соединенные кабелями со шкафом управления 9, закрепленным на раме 1. Шкаф управления 9 связан по каналу связи с персональным компьютером с предустановленным программным обеспечением, через которое задают режим работы раздатчика. Шкаф управления 9 содержит аккумулятор и магнитный токосъёмник. Наличие токосъёмника позволяет раздатчику автоматически снимать электричество с внешних сетей и устройств электроснабжения, что способствует автономной работе устройства по установленной программе, а также позволяет снизить затраты на монтаж раздатчика, так как не требует прокладку электрических кабель-каналов в производственном помещении.
Работа устройства осуществляется следующим образом. В бункеры 2 засыпают субстрат для дозирования, после чего подают сигнал (радио- или электрический) от персонального компьютера на шкаф управления 9, который принимает команду и включает каретки 6 или 7. Включенная каретка 6 или 7 начинает линейное передвижение, передвигая вместе с собой по монорельсу раму 1. Таким образом раздатчик осуществляет движение по всему производственному помещению, дозируя продукт в любой его точке. В процессе работы раздатчика бункер 2 непрерывно давит на бандаж 3, к которому прикреплены узлы тензодатчиков 4, тензодатчики фиксируют это давление и передают сигнал о массе бункера с субстратом через шкаф управления 9 на персональный компьютер. Субстрат представляет собой гранулированную фракцию размером от 0,5 до 30 мм. Другие размеры гранул субстрата также возможны, но при модификации размеров питателя и рассеивателя. В заданной точке монорельса раздатчик останавливается, по сигналу от персонального компьютера включают питатель 5 бункера 2 и рассеиватель 8 и начинают дозировать субстрат в соответствии с заданной программой раздачи. Субстрат из бункера 2 попадает через роторный питатель 5 в приемник рассеивателя 8. В рассеивателе 8 субстрат попадает на вращающуюся крыльчатку, которая разбрасывает его в стороны на расстояние радиуса от 0,2 до 5 м в зависимости от скорости двигателя рассеивателя. Если равномерность рассеивания субстрата не принципиальна, то конструкция раздатчика может работать без рассеивателя 8. В этом случае субстрат будет падать вертикально вниз. Узлы тензодатчиков 4 регистрируют вес субстрата, отмеренный на данный момент, и передают сигнал в шкаф управления 9 о снижении массы бункера 2 на размер массы необходимой порции, после чего шкаф управления 9 подает сигнал на питатель 5 и рассеиватель 8 об остановке и процесс дозирования прекращается. Далее, в соответствии с программой работы, раздатчик включает каретки 6 или 7 и цикл работы повторяют заново. На протяжении процесса раздачи субстрата питание раздатчика осуществляется от аккумулятора шкафа управления 9, но в случае разрядки аккумулятора соответствующий сигнал поступает на шкаф управления 9, который дает команду каретке 6 или 7 вернуть раздатчик к стационарному источнику питания, а магнитный токосъемник шкафа управления 9 автоматически присоединяется к источнику питания для подзарядки.
Заявленное устройство позволяет достичь следующих преимуществ:
- значительно повышается надежность и отказоустойчивость устройства в условиях повышенной влажности производства за счет отсутствия необходимости использования проводных систем электроснабжения,
- повышается точность дозировки сыпучего продукта в процессе его раздачи, за счет применения весового дозирования
- повышается эффективность выращивания объектов аквакультуры за счет увеличения кормового пятна,
- появляется возможность питания устройства в любой точке производственного помещения,
- повышается скорость монтажа при снижении финансовых затрат, так как в качестве монорельса используется стандартный типовой двутавр,
- повышается маневренность устройства за счет обеспечения возможности вращения кареток, двигающихся по монорельсу,
- появляется возможность быстрой модернизации, замены объемов бункеров,
- обеспечивается более высокая степень автономности, автоматизации за счет автоматической зарядки устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптическая система управления процессом приготовления и раздачи кормовой смеси | 2023 |
|
RU2817884C1 |
| Роботизированный кормораздатчик | 2024 |
|
RU2821552C1 |
| СИСТЕМА УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ МИКСЕРОМ-КОРМОРАЗДАТЧИКОМ | 2014 |
|
RU2585043C2 |
| РАЗДАТЧИК КОРМОВ | 1998 |
|
RU2220568C2 |
| ВЕСОВОЙ ПОРЦИОННЫЙ РАЗДАТЧИК КОРМОВ | 1999 |
|
RU2165692C2 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| ПОСТРОЙКА ДЛЯ СОДЕРЖАНИЯ ЖИВОТНЫХ | 1992 |
|
RU2088078C1 |
| Кормораздатчик | 2017 |
|
RU2640830C1 |
| Кормораздатчик | 1986 |
|
SU1360668A2 |
| РАЗДАТЧИК-СМЕСИТЕЛЬ КОРМОВ | 2006 |
|
RU2331191C1 |

Изобретение относится к устройствам автоматической раздачи сыпучих продуктов. Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов состоит из рамы и бункера. Во внутреннем пространстве рамы зафиксирован по меньшей мере один бункер. К нижнему отверстию бункера подсоединен питатель. В верхней части рамы установлены каретки. Питатель и каретки содержат электроприводы, подключенные к шкафу управления. Шкаф установлен на раме и связан по каналу связи с персональным компьютером. Бункер зафиксирован в раме посредством бандажа, на поверхности которого вокруг бункера равноудаленно закреплены три узла тензодатчиков так, что опоры тензодатчиков зафиксированы на раме. Каждый узел тензодатчика подключен к шкафу управления. Шкаф управления содержит магнитный токосъемник и аккумулятор. Достигается повышение точности дозирования сыпучих продуктов при использовании объемных методов дозирования, а также снижение показателей аварийности технологического процесса раздачи сыпучих продуктов. 2 з.п. ф-лы, 1 ил. 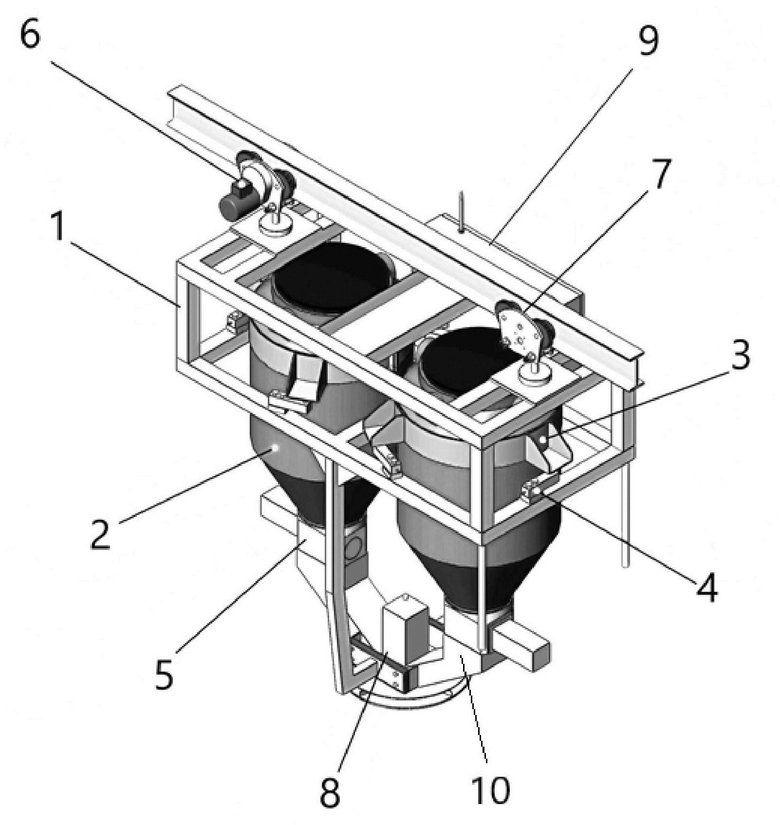
1. Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов, состоящее из рамы, во внутреннем пространстве которой зафиксирован по меньшей мере один бункер, содержащий нижнее отверстие, к которому подсоединен питатель, в верхней части рамы установлены каретки, причем питатель и каретки содержат электроприводы, подключенные к шкафу управления, установленному на раме и связанному по каналу связи с персональным компьютером, отличающееся тем, что бункер зафиксирован в раме посредством бандажа, на поверхности которого вокруг бункера равноудаленно закреплены три узла тензодатчиков так, что опоры тензодатчиков зафиксированы на раме, каждый узел тензодатчика подключен к шкафу управления, при этом шкаф управления содержит магнитный токосъемник и аккумулятор.
2. Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов по п. 1, отличающееся тем, что содержит рассеиватель, к которому через рукав подсоединен упомянутый питатель, причем рассеиватель содержит электропривод, соединенный со шкафом управления.
3. Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов по п. 1, отличающееся тем, что упомянутые каретки подсоединены к раме через вращающиеся втулки.
| Integrated Aqua Systems Inc | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| CN 103039395 B, 02.04.2014 | |||
| CN 109220947 A, 18.01.2019 | |||
| FR 2939280 A1, 11.06.2010 | |||
| FR 3003431 A1, 26.09.2014. | |||
