Изобретение относится к сельскому хозяйству и может быть применено на животноводческих фермах для приготовления и раздачи корма на фермах КРС.
Известен миксер кормораздатчик SILOKING SelfLine System 1000+30, выпускаемый маркой «SILOKING» фирмой Mayer Maschinenbaugesellschaft mbh, (www.siloking.com), представленный на выставке «Агротехника - 2009» в 2009 году, включающий бункер, раздаточный транспортер, кабину, устройство погрузки корма, три шнека, перемешивающее корм.
Недостатком данного изобретения является недостаточная точность, надежность, невозможность управления без оператора, низкая производительность.
Наиболее близким к предлагаемому изобретению является раздатчик-смеситель, содержащий бункер, с расположенными вдоль него продольными смешивающими шнеками, выгрузное окно с заслонками, выгрузной шнек (патент RU 2129773, МКИ A01K 5/02).
Недостатком данного кормораздатчика является также недостаточная точность, надежность, низкая скорость перемешивания корма, невозможность управления без оператора.
Задачей предлагаемого изобретения является повышение надежности, точности, производительности, автоматизация и роботизация, что делает возможным управление без оператора.
Техническим результатом предлагаемого изобретения является автоматизация передвижения и раздачи корма, с сохранением габаритных размеров и производительности.
Вышеуказанный технический результат достигается тем, что в предлагаемую систему управления роботизированным миксером-кормораздатчиком, состоящую из бункера, вертикальных шнеков, раздаточного транспортера, кабины оператора, дополнительно введены тензодатчики веса, адаптер, микроконтроллер, блок тестового режима, навигатор, роутер WIFI, камеры переднего, заднего и бункерного вида соответственно, преобразователь видеосигнала в цифровой, механизм выдвижения транспортера, бункер-циклон объедков корма, устройство сбора объедков корма, пантограф, электропривод железнодорожной платформы колес, при этом первым входом микроконтроллер через роутер соединен с центром управления, вторым входом микроконтроллер соединен со спутниковым навигатором, третьим входом соединен с тестовой системой, при этом тензодатчики веса через адаптер соединены с четвертым входом микроконтроллера, с пятым входом соединены видеокамеры через преобразователь, а микроконтроллер первым выходом через таймер соединен с перемешивающим механизмом, вторым выходом соединен через усилители с механизмом выдвижения транспортера, третьим выходом микроконтроллер соединен с механизмом подачи корма на транспортер через регулятор скорости подачи, четвертым выходом соединен с механизмом выдвижения устройства забора отходов и включением электродвигателя-вентилятора циклона.
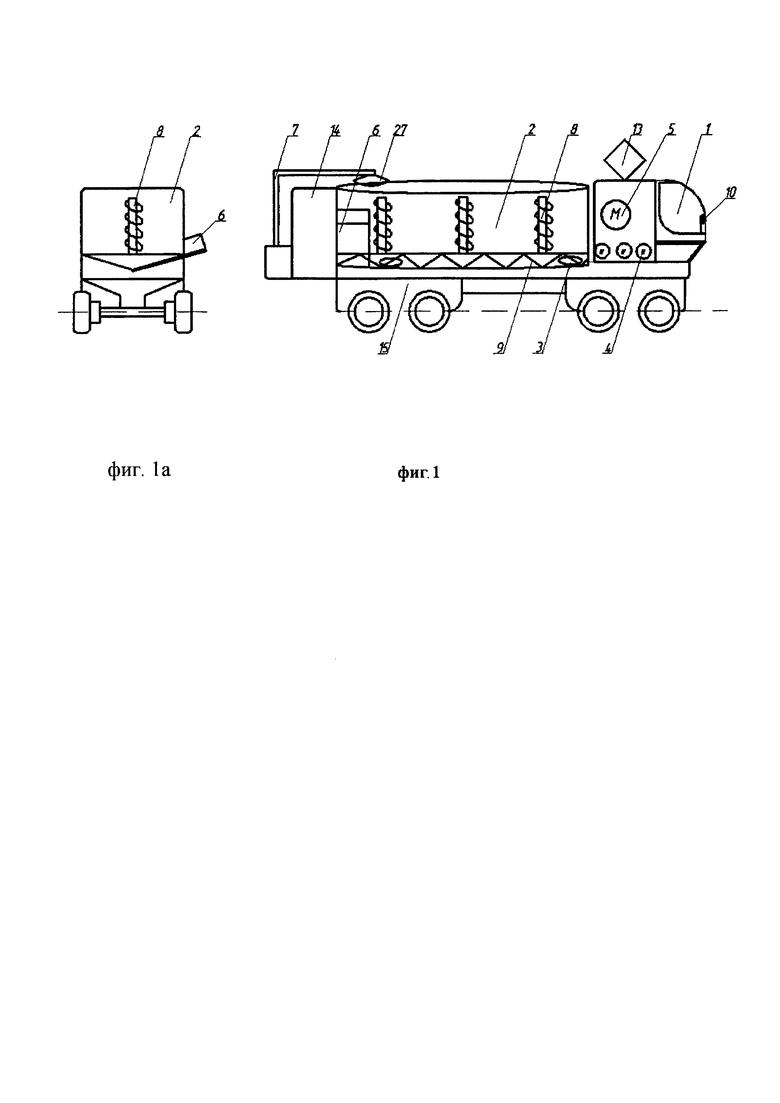
Сущность предлагаемого изобретения проясняется фиг. 1, 1a и фиг. 2.
На фиг. 1, 1a представлена общая схема устройства.
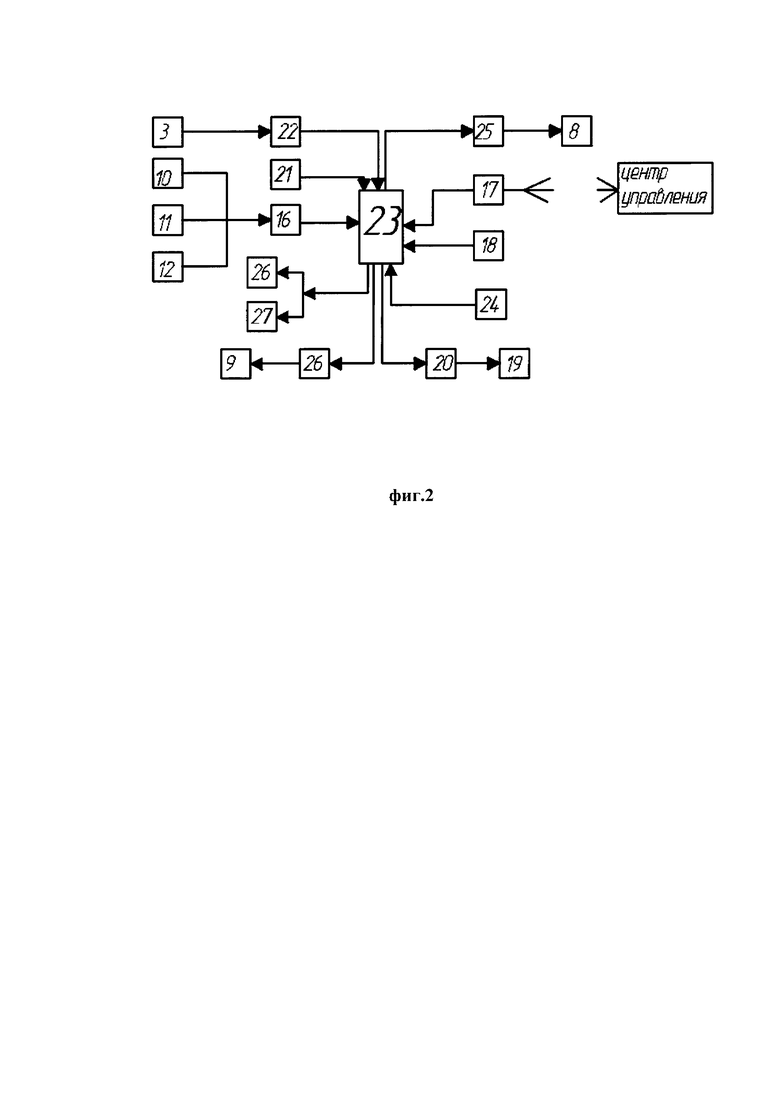
На фиг. 2 представлена схема сигналов, поступающих на микроконтроллер и от него.
Система управления роботизированным миксером-кормораздатчиком включает кабину 1, бункер 2, в котором установлены тензодатчики 3, три асинхронных двигателя 4, тяговый двигатель 5, транспортер раздачи 6, устройство сбора объедков корма 7, вертикальные шнеки перемешивания 8, горизонтальные шнеки 9, камеру переднего вида 10, камеру заднего вида 11, камеру, установленную в бункере 12, пантограф 13, бункер-циклон объедков корма 14, электропривод железнодорожной платформы колес 15, преобразователь видеосигнала в цифровой 16, роутер WI-FI 17, навигационную систему ГЛОНАСС 18, датчики выдвижения транспортера 19, их усилители 20, устройство остановки 21, адаптер 22, микроконтроллер 23, тестовую систему 24, таймер 25, регулятор скорости раздачи 26, электродвигатель-вентилятор бункера-циклона 27.
Первым входом микроконтроллер 23 через роутер 17 соединен с центром управления, вторым входом микроконтроллер 23 соединен со спутниковым навигатором 18, третьим входом соединен с тестовой системой 24, при этом тензодатчики веса 3 через адаптер 22 соединены с четвертым входом микроконтроллера, с пятым входом соединены видеокамеры 10, 11, 12 через преобразователь 16, а микроконтроллер 23 первым выходом через таймер 25 соединен с перемешивающим механизмом 8, вторым выходом соединен через усилители 20 с механизмом выдвижения транспортера 19, третьим выходом микроконтроллер 23 соединен с механизмом подачи корма 9 на транспортер 6 через регулятор скорости подачи 26, четвертым выходом соединен с механизмом выдвижения устройства забора отходов 7 и включением электродвигателя-вентилятора циклона 14.
Устройство работает следующим образом.
Из центра управления через WIFI 17 на миксер-кормораздатчик поступает сигнал о необходимости кормления, робот запускается в тестовом режиме 24, проверяя все механизмы и автоматику. Далее поступает следующий сигнал, содержащий номера ферм, на которые необходимо раздать корм и «рецепт». С помощью навигационной системы ГЛОНАСС 18 прокладывается маршрут по всем фермам. После погрузки корма миксер определяет его массу с помощью тензодатчиков 3. Сигнал от тензодатчиков 3 через адаптер 22 поступает на микроконтроллер 23. Далее, измерив необходимое количество корма, миксер перемешивает его вертикальными шнеками 8. В бункере установлена камера 12, с помощью которой можно наблюдать за качеством перемешивания. Перемешав, он отправляется к первой ферме. Подъехав к первой ферме, с помощью камеры переднего вида 10 устройство считывает номер фермы. Далее он уменьшает скорость и считывает знак «начало раздачи» Δ. Потом он выдвигает раздаточный транспортер 6. Горизонтальные шнеки 9 подают корм на транспортер 6. Раздав корм, миксер считывает знак □ «конец раздачи». Далее, объехав все фермы, он возвращается в кормоцех.
После вечернего кормления поступает сигнал о необходимости собрать остатки корма. Миксер с помощью специального устройства 7 собирает объедки в бункер-циклон 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный кормораздатчик | 2024 |
|
RU2821552C1 |
| Оптическая система управления процессом приготовления и раздачи кормовой смеси | 2023 |
|
RU2817884C1 |
| Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов | 2023 |
|
RU2799280C1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| РАЗДАТЧИК КОРМОВ | 1998 |
|
RU2220568C2 |
| Кормораздатчик-смеситель | 1982 |
|
SU1135469A1 |
| Кормораздатчик | 1979 |
|
SU782774A1 |
| РАЗДАТЧИК-СМЕСИТЕЛЬ КОРМОВ | 2006 |
|
RU2331191C1 |
| Кормораздатчик | 1983 |
|
SU1138079A1 |
| РАЗДАТЧИК КОРМОВ | 2000 |
|
RU2181242C2 |
Изобретение относится к сельскому хозяйству. Система состоит из бункера, вертикальных шнеков, раздаточного транспортера, кабины оператора. Дополнительно введены тензодатчики веса, адаптер, микроконтроллер, блок тестового режима, навигатор, роутер WIFI, камеры переднего, заднего и бункерного вида соответственно, преобразователь видеосигнала в цифровой, механизм выдвижения транспортера, бункер-циклон объедков корма, устройство сбора объедков корма, пантограф, электропривод железнодорожной платформы колес. Первым входом микроконтроллер через роутер соединен с центром управления, вторым входом микроконтроллер соединен со спутниковым навигатором, третьим входом соединен с тестовой системой. Тензодатчики веса через адаптер соединены с четвертым входом микроконтроллера, с пятым входом соединены видеокамеры через преобразователь. Микроконтроллер первым выходом через таймер соединен с перемешивающим механизмом, вторым выходом соединен через усилители с механизмом выдвижения транспортера, третьим выходом микроконтроллер соединен с механизмом подачи корма на транспортер через регулятор скорости подачи, четвертым выходом соединен с механизмом выдвижения устройства забора отходов и включением электродвигателя-вентилятора циклона. Обеспечивается повышение надежности, точности, производительности, автоматизация и роботизация, что делает возможным управление без оператора. 3 ил.
Система управления роботизированным миксером-кормораздатчиком, состоящая из бункера, вертикальных шнеков, раздаточного транспортера, кабины оператора, отличающаяся тем, что дополнительно введены тензодатчики веса, адаптер, микроконтроллер, блок тестового режима, навигатор, роутер WIFI, камеры переднего, заднего и бункерного вида соответственно, преобразователь видеосигнала в цифровой, механизм выдвижения транспортера, бункер-циклон объедков корма, устройство сбора объедков корма, пантограф, электропривод железнодорожной платформы колес, при этом первым входом микроконтроллер через роутер соединен с центром управления, вторым входом микроконтроллер соединен со спутниковым навигатором, третьим входом соединен с тестовой системой, при этом тензодатчики веса через адаптер соединены с четвертым входом микроконтроллера, с пятым входом соединены видеокамеры через преобразователь, а микроконтроллер первым выходом через таймер соединен с перемешивающим механизмом, вторым выходом соединен через усилители с механизмом выдвижения транспортера, третьим выходом микроконтроллер соединен с механизмом подачи корма на транспортер через регулятор скорости подачи, четвертым выходом соединен с механизмом выдвижения устройства забора отходов и включением электродвигателя-вентилятора циклона.
| WO 2009060442 A2, 14.05.2009 | |||
| Машина для чистки овощей | 1927 |
|
SU14518A1 |
| ТРАНСПОРТЕР К ЧЕСАЛЬНЫМ, ТРЕПАЛЬНЫМ И Т. П. МАШИНАМ | 1946 |
|
SU70088A1 |
| Устройство управления мобильным кормораздатчиком | 1988 |
|
SU1530152A1 |

