Область техники, к которой относится изобретения
Настоящее изобретение в общем относится к эффективной нейромодуляции. Более конкретно, изобретение относится к устройству для нейромодуляции, позволяющему эффективно направлять сигнал нейромодуляции от генератора сигналов в целевой нерв.
Предпосылки к созданию изобретения
Настоящий раздел предлагает информацию о предпосылках к созданию настоящего изобретения, которые не обязательно относятся к предшествующему уровню техники.
Электрическая нейромодуляция до настоящего момента использовалась для лечения боли, недержания мочи, психических и других проблем, а также для профилактики сосудистых заболеваний.
Традиционные системы используют простые электроды для нейромодуляции в виде инвазивных игольчатых электродов, вводимых в непосредственной близости от стимулируемого нерва. Необходимость введения игольчатых электродов в непосредственной близости от нерва всегда связана с риском неправильного размещения электрода, следствием чего может быть повреждение нерва или более низкая, чем требуется, эффективности нейромодуляции, когда электрод установлен не в непосредственной близости от нерва.
В последние годы стал известен новый неинвазивный способ с использованием биполярных электродов, выполненных из металла, позволяющие модулировать нужный нерв. Такие электроды должны быть установлены так, чтобы их соответствующие концы попали на точку стимуляции на коже пациента. Такую точку стимуляции обычно определяют как близкую к ожидаемой позиции на основе опыта и знаний анатомии. Интенсивность импульсов нейромодуляции обычно предварительно устанавливают на заводе-изготовителе.
Такой подход имеет тот недостаток, что теряется наиболее выигрышная позиция электродов для нейромодуляции, оказывающая значительное влияние на нейромодуляционную терапию в целом. В дополнение к этому, электроды могут перемещаться в процессе нейромодуляции без ухудшения эффекта нейромодуляционной терапии.
Более того, для компенсации неточности положения электродов относительно целевого нерва интенсивность импульсов для нейромодуляционной терапии станавливают более высокой, чем это необходимо, создавая дискомфорт для пациента, получающего нейромодуляционную терапию.
Поэтому было бы предпочтительно иметь устройство, учитывающее по меньшей мере некоторые из обсуждаемых выше проблем, а также другие возможные проблемы.
Раскрытие сущности изобретения
Одной из целей настоящего изобретения является устранение по меньшей мере части этих недостатков. Один из аспектов настоящего изобретения направлен на создание устройства для нейромодуляции. Устройство для нейромодуляции содержит совокупность электродов, причем каждый из совокупности электродов имеет электропроводный элемент, накладываемый на кожу или вводимый под кожу пациента, генератор импульсов, электрически соединенный с каждым из совокупности электродов для подачи электрических импульсов на совокупность электродов, и блок управления, соединенный с генератором импульсов и позволяющий измерять электрическое сопротивление и/или вольтамперную характеристику по меньшей мере между двумя электродами из совокупности электродов. Блок управления осуществляет управление формой электрических импульсов на основе измеренного электрического сопротивления и/или вольтамперной характеристики.
Согласно другому аспекту, устройство для нейромодуляции также содержит по меньшей мере один детектор, конфигурированный для измерения отклика тела пациента по меньшей мере на один импульс, формируемый генератором импульсов, при этом детектор обеспечивает обратную связь по измеренному отклику для блока управления.
Согласно другому аспекту, указанный по меньшей мере один детектор конфигурирован для измерения изменений электрической активности, создаваемой мышцами в ответ по меньшей мере на один импульс, формируемый генератором импульсов.
Согласно другому аспекту, указанный по меньшей мере один детектор представляет собой по меньшей мере один электромиографический (EMG) датчик.
Согласно другому аспекту, указанный по меньшей мере один детектор представляет собой по меньшей мере один детектор движения, конфигурированный для определения движения тела пациента и для обеспечения подачи в блок управления сигнала обратной связи по этому движению. Движение тела пациента представляет собой отклик по меньшей мере на один импульс от генератора импульсов.
Согласно другому аспекту, указанный по меньшей мере один детектор движения представляет собой по меньшей мере одно из следующих устройств: акселерометр, датчик электрического поля, камера, оптический датчик, инфракрасный датчик, емкостный датчик, индуктивный датчик, ультразвуковой датчик или магнитный датчик.
Согласно другому аспекту, по меньшей мере один электрод из указанной совокупности электродов накладывают рядом по меньшей мере с одним из периферийных нервов тела пациента.
Согласно другому аспекту, по меньшей мере один электрод из указанной совокупности электродов накладывают на конечность, а определяемое движение пациента является движением конечности.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый на заднюю поверхность колена первой ноги пациента, и второй электрод, накладываемый на заднюю поверхность колена второй ноги пациента.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый рядом с лодыжкой ноги пациента.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый рядом с пещеристым нервом пациента.
Согласно другому аспекту, по меньшей мере один электрод из совокупности электродов накладывают на горло пациента, а определяемое детектором движение пациента представляет собой движение по меньшей мере одной из лицевых мышц пациента.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый рядом с лодыжкой первой ноги пациента, и второй электрод, накладываемый рядом с лодыжкой второй ноги пациента.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый на кожу или вводимый под кожу пациента.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый на кожу живота пациента.
Согласно другому аспекту, совокупность электродов содержит первый электрод, накладываемый на нижнюю часть спины пациента поблизости от нервов крестцового сплетения.
Согласно другому аспекту, блок управления конфигурирован для генерации сигнала обратной связи для приведения положения электрода к заданному нерву, когда по меньшей мере один электрод перемещается или изменяет свое положение на коже пациента, при этом сигнал обратной связи формируют на основе изменений сопротивления и/или вольтамперной характеристики между по меньшей мере двумя электродами из указанной совокупности электродов.
Согласно другому аспекту, сигнал обратной связи генерируют по меньшей мере в одной из следующих форм: звук, изображение, последовательность изображений, физиологический отклик.
Согласно другому аспекту, блок управления конфигурирован для управления крутизной нарастающего фронта электрических импульсов и/или амплитудой электрических импульсов.
Согласно другому аспекту, блок управления конфигурирован для управления периодом импульсов и/или длительностью электрических импульсов.
Согласно другому аспекту, блок управления конфигурирован для периодического измерения сопротивления и/или вольтамперной характеристики.
Согласно другому аспекту, блок управления конфигурирован для динамического управления внутренним сопротивлением генератора импульсов на основе результатов периодических измерений сопротивления и/или вольтамперной характеристики.
Согласно другому аспекту, указанные электроды образованы по меньшей мере одной матрицей электродов, содержащей несколько электропроводных элементов, электрически изолированных один от другого, и каждый из этих электропроводных элементов может быть наложен на кожу пациента;
Следующий аспект направлен на способ использования устройства для нейромодуляции, как описано выше. Способ содержит: наложение совокупности электродов на кожу пациента или введение их под кожу, причем по меньшей мере один электрод из совокупности электродов помещают в место вероятного нахождения целевого нерва, который нужно модулировать; инициирование режима калибровки и выполнение калибровки первоначальной позиции посредством измерения сопротивления и/или вольтамперной характеристики между электродами; перемещение или изменение положения по меньшей мере одного электрода из совокупности электродов, наложенного на кожу пациента, периодически измеряя, в процессе этого перемещения или изменения положения, и регистрируя сопротивление и/или вольтамперную характеристику между электродами; определение вариаций зарегистрированных величин сопротивления и/или зарегистрированной вольтамперной характеристики.
Согласно следующему аспекту, способ содержит генерацию сигнала обратной связи для приведения по меньшей мере одного из совокупности электродов к оптимальной позиции относительно целевого нерва, который нужно модулировать, на основе указанных выше вариаций.
Согласно следующему аспекту, способ содержит генерацию слышимого звука или представления изображения для генерации сигнала обратной связи с целью направления по меньшей мере одного из совокупности электродов к оптимальной позиции.
Согласно следующему аспекту, способ содержит определение первоначального профиля импульса для нейромодуляции на основе измеренного сопротивления и/или измеренной вольтамперной характеристики.
Согласно следующему аспекту, способ содержит генерацию по меньшей мере одного импульса генератором импульсов, соединенным с каждым из указанных электродов.
Согласно следующему аспекту, способ содержит определения отклика тела пациента по меньшей мере на один импульс, сформированный генератором импульсов.
Согласно следующему аспекту, способ содержит настройку частоты и/или амплитуды электрических импульсов.
Другие области применимости станут ясны из приведенного здесь описания. Это описание и конкретные примеры в кратком изложении существа изобретения предназначены только для целей иллюстрации и не направлены на ограничение объема настоящего изобретения.
Следующий аспект направлен на создание способа использования устройства для нейромодуляции, как описано выше, для консервативного лечения по меньшей мере одного из заболеваний – гиперактивности мочевого пузыря, мигрени, эректильной дисфункции, нарушений сперматогенеза или доброкачественной гиперплазии простаты.
Согласно другому аспекту, способ консервативного лечения содержит: наложение нескольких электродов на кожу или введение их под кожу пациента, причем по меньшей мере один электродов из указанной совокупности электродов располагается в вероятной позиции целевого нерва, который необходимо модулировать, и генерацию импульсов посредством генератора импульсов, соединенного с каждым из совокупности нескольких электродов.
Согласно следующему аспекту, способ консервативного лечения содержит: наложение по меньшей мере одного электрода из совокупности электродов на кожу или введение под кожу пациента, причем по меньшей мере один электрод расположен в вероятной позиции по меньшей мере одного из следующих нервов: седалищный нерв, половой нерв, малоберцовый нерв, пещеристый нерв, нервы крестцового сплетения или большеберцовый нерв.
Согласно следующему аспекту, способ консервативного лечения содержит: наложение по меньшей мере одного электрода из совокупности электродов на вероятное место расположения пояснично-крестцового сплетения, общего малоберцового нерва, верхнего ягодичного нерва, нижнего ягодичного нерва, заднего кожного нерва бедра, нерва внутренней запирательной мышцы, нерва грушевидной мышцы, нерва четырехглавой мышцы бедра, подошвенного или копчикового нерва.
Согласно следующему аспекту, предлагаемый способ консервативного лечения может быть использован вместе или как часть способа использования устройства для нейромодуляции, как описано выше.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения станут понятны из следующего подробного описания некоторых вариантов изобретения, данного посредством неограничивающего примера, и со ссылками на прилагаемые чертежи, на которых:
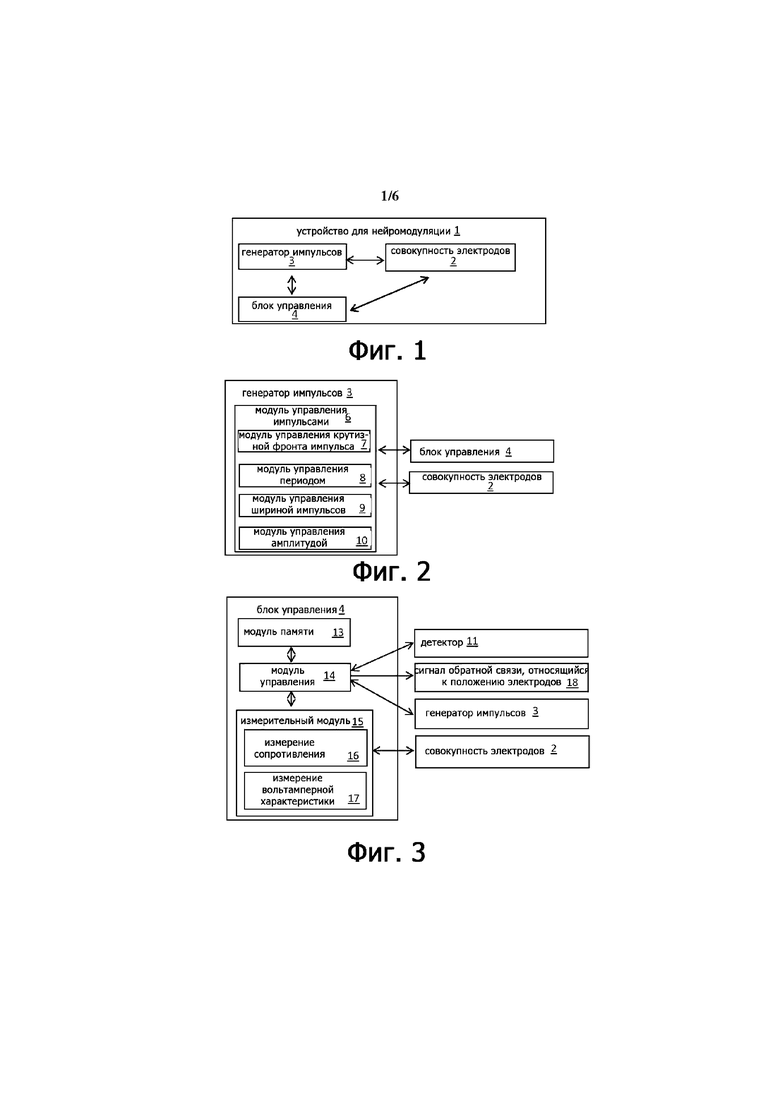
- Фиг. 1 представляет блок-схему, показывающую один из вариантов устройства для нейромодуляции.
- Фиг. 2 представляет блок-схему, показывающую один из вариантов генератора импульсов.
- Фиг. 3 представляет блок-схему, показывающую один из вариантов блока управления.
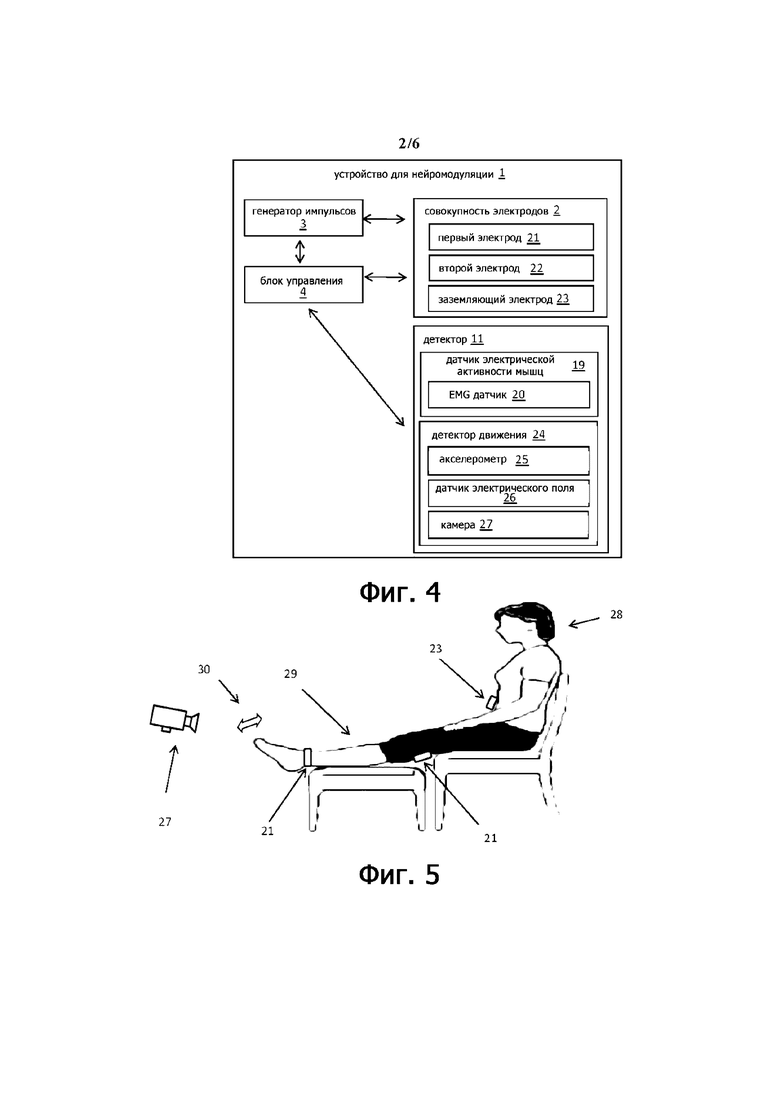
- Фиг. 4 представляет блок-схему, показывающую другой вариант устройства для нейромодуляции.
- Фиг. 5 представляет иллюстрацию примера размещения электродов на теле пациента с использованием видеокамеры в качестве детектора движения.
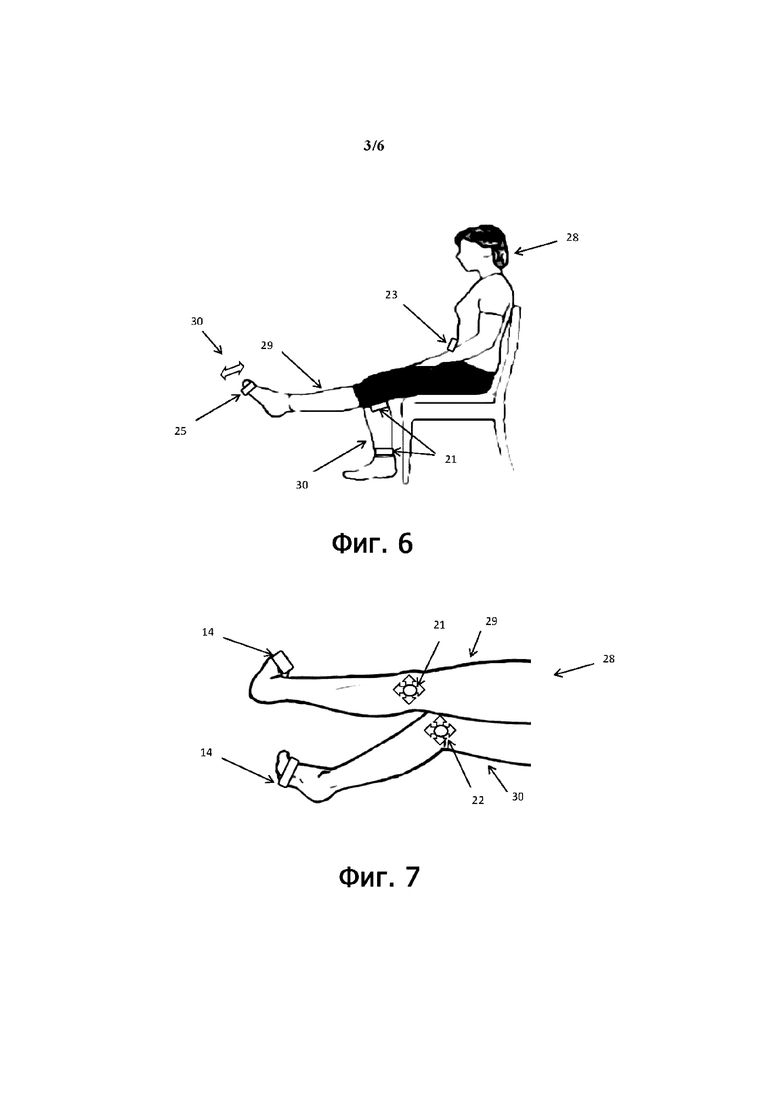
- Фиг. 6 представляет иллюстрацию примера размещения электродов на теле пациента с использованием акселерометра в качестве детектора движения.
- Фиг. 7 представляет иллюстрацию примера размещения электродов на теле пациента.
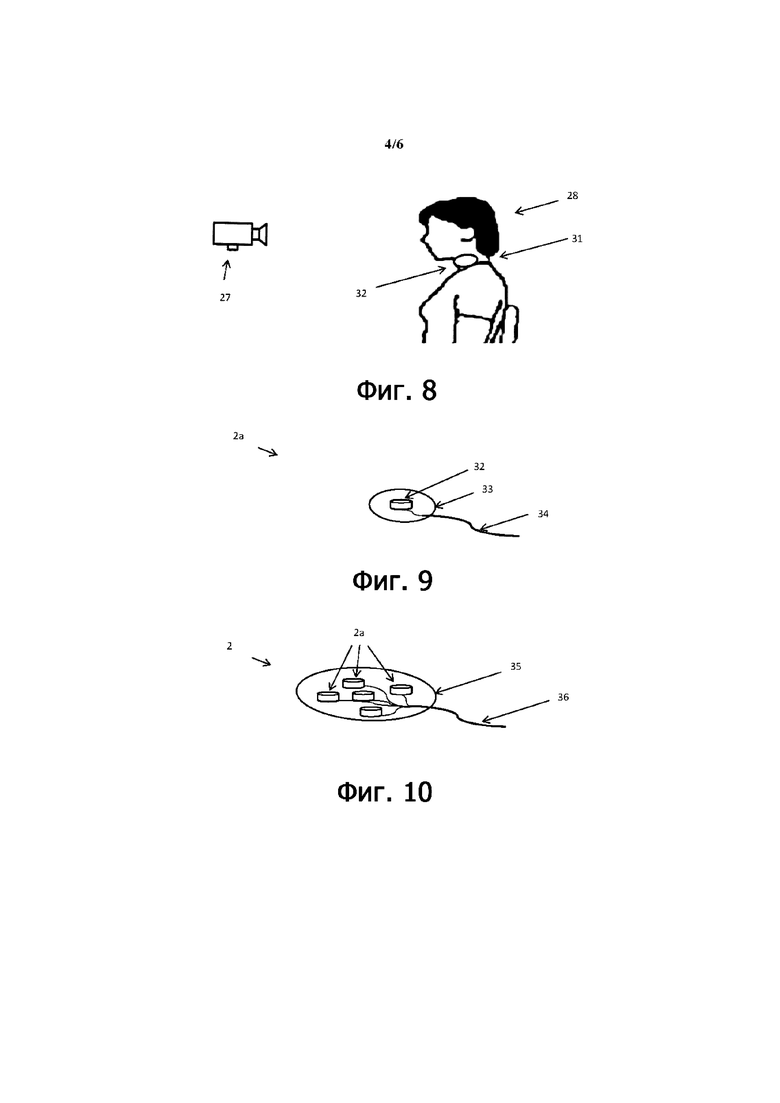
- Фиг. 8 представляет иллюстрацию другого примера размещения электродов на теле пациента.
- Фиг. 9 представляет иллюстрацию примера электрода.
- Фиг. 10 представляет иллюстрацию примера матрицы электродов.
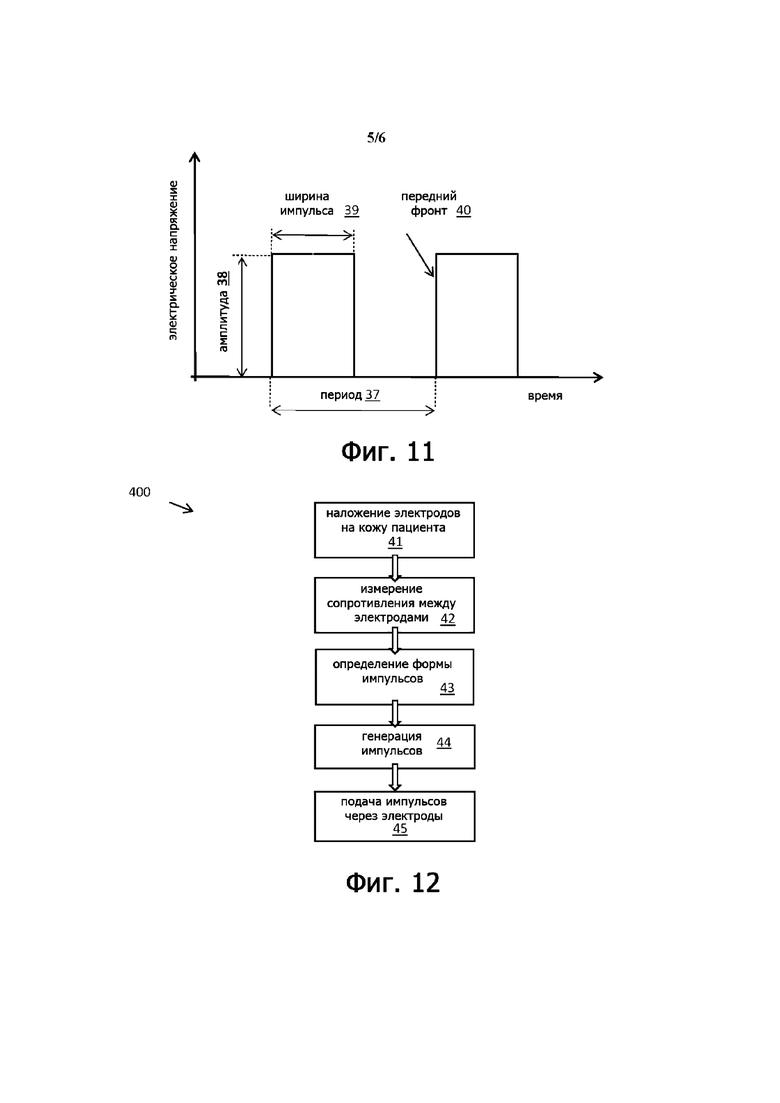
- Фиг. 11 представляет иллюстрацию примера переменных электрических импульсов.
- Фиг. 12 представляет логическую схему варианта способа использования устройства для нейромодуляции.
- Фиг. 13 представляет логическую схему варианта способа позиционирования электродов.
- Фиг. 14 представляет логическую схему варианта способа определения формы импульсов.
Подробное описание
Приведенное выше краткое изложение существа изобретения, а также последующее подробное описание некоторых примеров будут лучше поняты при чтении в сочетании с прилагаемыми чертежами. Как используется здесь, элемент или этап, упомянутый в единственном числе и снабженный артиклем "a" или "an" следует понимать, как не исключающий множественного числа элементов или этапов, если только такое исключение не установлено в явном виде. Далее ссылки на «один вариант» не следует интерпретировать как исключающие существование дополнительных вариантов, также содержащих упомянутые признаки. Далее, если противоположное не установлено в явном виде, варианты, «содержащие» или «имеющие» элемент или несколько элементов с конкретным свойством, могут содержать дополнительные элементы, не имеющие такого свойства.
На чертежах, одинаковые позиционные обозначения присвоены идентичным или подобным элементам, если не установлено иное. На чертежах размер каждого элемента или конкретной части, составляющей элемент, увеличен, опущен или показан схематично для удобства и ясности описания. Таким образом, размер каждого компонента может не полностью отражать фактический размер. В случае, когда будет признано, что подробное описание соответствующих известных функций или конструкций может излишне затемнять смысл настоящего изобретения, такое объяснение будет опущено.
На Фиг. 1 показана блок-схема примера варианта устройства 1 для нейромодуляции. Этот вариант содержит совокупность электродов 2, генератор 3 импульсов и блок 4 управления.
Как показано в примере, представленном на Фиг. 9, каждый электрод 2a из указанной совокупности электродов 2 может иметь электропроводный элемент 32, накладываемый на кожу пациента 28 (показанного на Фиг. 5 – 8).
Генератор 3 импульсов может быть электрически соединен с каждым электродом 2a из совокупности электродов 2 для передачи электрических импульсов к этим электродам 2. Блок 4 управления может быть соединен с генератором 3 импульсов и адаптирован для измерения сопротивления 16 и/или вольтамперной характеристики 17 между по меньшей мере двумя электродами из совокупности электродов 2a (см. Фиг. 3).
Блок 4 управления может быть адаптирован для управления формой электрических импульсов на основе измеренных сопротивления и/или вольтамперной характеристики.
Предпочтительно, совокупность 2 электродов 2a содержит по меньшей мере один заземляющий электрод 23 (см. например, Фиг. 4) и по меньшей мере один активный электрод. Этот по меньшей мере один активный электрод может быть первым и/или вторым электродом 21, 22, как показано на Фиг. 4.
Предпочтительно, каждый из указанных по меньшей мере одного активного электрода 21, 22, как показано на Фиг. 9 может представлять собой отдельный электрод, содержащий электропроводный элемент 32, неэлектропроводный материал 35 и кабель 34. Кабель 34 может электрически соединять электропроводный элемент 32 с генератором 3 импульсов и/или с блоком 4 управления.
Предпочтительно, совокупность 2 электродов 2a может быть образована посредством по меньшей мере одной матрицы электродов, как показано на Фиг. 10. Тогда каждый из указанной по меньшей мере одной матрицы электродов содержит совокупность электропроводных элементов 32, электрически изолированных один от другого. Каждый из этих электропроводных элементов 32 указанной по меньшей мере одной матрицы электродов может быть наложен на кожу пациента 28, как показано, например, на Фиг. 5 – 8. Предпочтительно, каждый из электродов 2 указанной по меньшей мере одной матрицы электродов также содержит неэлектропроводный материал 35, с котором соединены указанные электропроводные элементы 32. Совокупность электропроводных элементов 32 может также быть погружена в неэлектропроводный материал. Неэлектропроводный материал может иметь любую подходящую форму для конкретного расположения электрода, чтобы обеспечить возможность наложения электрод на тело пациента 28. Форма отдельного электрода 2a или матрицы 2 электродов может иметь быть в виде усеченного конуса, овальной, криволинейной или плоской. Электропроводные элементы 32 могут быть помещены один рядом с другими. Неэлектропроводный материал 35 может обеспечивать средство опоры и/или удержания для электропроводных элементов, чтобы электропроводные элементы 32 оставались на месте и были электрически изолированы один от другого. Предпочтительно, каждая из указанных по меньшей мере одной матрицы 2 электродов также содержит кабель 36 для электрического соединения электропроводных элементов 32 с генератором импульсов и/или с блоком управления.
На Фиг. 2 представлена блок-схема одного из вариантов генератора 3 импульсов. Этим генератором 3 импульсов можно управлять через блок 4 управления, либо генератором импульсов можно управлять напрямую. Предпочтительно, генератор 3 импульсов содержит модуль 6 управления импульсами, соединенный с блоком 4 управления. Соединение между модулем 6 управления импульсами и блоком 4 управления может быть проводным, например, через кабель, или беспроводным соединением. Предпочтительно, модуль 6 управления импульсами также соединен с совокупностью 2 электродов 2, 2a. Соединение между модулем 6 управления импульсами и совокупностью 2 электродов 2a может быть проводным, например, через кабель, или беспроводным соединением. Модуль 6 управления импульсами может содержать модуль 7 управления крутизной фронта импульса, выполненный с возможностью управления крутизной фронта импульса, формируемого генератором импульсов. Управляемый фронт импульса может представлять собой восходящий фронт 40 импульса и/или нисходящий фронт импульса. Модуль 6 управления импульсами может также содержать модуль 8 управления периодом, для управления периодом 37 формируемых импульсов. Модуль 6 управления импульсами может также содержать модуль 9 управления шириной импульсов, выполненный с возможностью управления шириной 39 генерируемых импульсов. Этот модуль 9 управления шириной импульсов позволяет обеспечить широтно-импульсную модуляцию импульса. Модуль 6 управления импульсами может также содержать модуль 10 управления амплитудой, выполненный с возможностью управления амплитудой 38 генерируемых импульсов.
Как показано на Фиг. 3, блок 4 управления может содержать модуль 14 управления и измерительный модуль 15. Предпочтительно блок 4 управления также содержит модуль 13 памяти. Предпочтительно модуль 14 управления сохраняет данные и считывает данные из модуля 13 памяти. Измерительный модуль 15 может содержать модуль 16 измерения сопротивления и/или модуль 17 измерения вольтамперной характеристики. Модуль 14 управления и измерительный модуль 15 могут быть соединены электрически, так что модуль 14 управления может считывать и интерпретировать данные, предоставляемые измерительным модулем 15. Модуль 14 управления может управлять измерениями, выполняемыми измерительным модулем 15. Модуль 14 управления блока 4 управления может быть выполнен с возможностью периодического измерения сопротивления и/или вольтамперной характеристики. Модуль 14 управления блока 4 управления может быть также конфигурирован для выполнения только индивидуальных измерений или индивидуальных измерений в сочетании с периодическими измерениями сопротивления и/или вольтамперной характеристики.
Модуль 14 управления может сохранять данные, измеренные измерительным модулем 15, в модуле 13 памяти. Модуль 14 управления может также обрабатывать и/или интерпретировать измеренные данные перед их сохранением. Модуль 14 управления может быть выполнен с возможностью сохранения и считывания данных, относящихся к пациенту, в/из модуле 13 памяти, и может быть выполнен с возможностью согласования данных пациента с измеренными данными и наоборот. Модуль 14 управления может быть конфигурирован для сохранения в модуле 13 памяти данных настройки устройства 1, относящихся к конкретному пациенту 28, и считывания этих данных из модуля памяти. Эти данные настройки устройства 1 могут быть измеренными и/или сформированными настройками импульсов. Модуль 14 управления может быть конфигурирован для согласования данных пациента с измеренными данными и наоборот. Модуль 14 управления может быть конфигурирован для дальнейшего согласования данных настройки устройства с данными пациента и с измеренными данными.
Измерительный модуль 15 может быть соединен с совокупностью электродов 2, 2a. Предпочтительно, измерительный модуль может быть соединен с каждым из совокупности электродов 2, 2a. Соединение между измерительным модулем и совокупностью электродов 2, 2a или каждым из совокупности электродов 2, 2a может представлять собой проводное соединение, например, по кабелю, или беспроводным соединением. Измерительный модуль 15 может быть конфигурирован для измерения сопротивления и/или вольтамперной характеристики между совокупностью электродов 2, 2a. Предпочтительно, измерительный модуль 15 конфигурирован для измерения сопротивления и/или вольтамперной характеристики между выбранными электродами из совокупности электродов 2, 2a. Измерительный модуль 15 может быть конфигурирован для выполнения измерений периодически или индивидуально по запросу. Модуль 14 управления может управлять настройками измерений, такими как периодичность, частота выборки, разрешение и/или тип измерений – измерение сопротивления или измерение вольтамперной характеристики.
Как отмечено ранее, блок 4 управления может быть адаптирован для управления формой электрических импульсов, генерируемых блоком генератора 3 импульсов, на основе измеренного сопротивления и/или вольтамперной характеристики. Поэтому блок 4 управления может быть соединен с генератором 3 импульсов для управления формируемыми импульсами. Блок 4 управления может быть соединен с генератором 3 импульсов через модуль 14 управления с целью управления генерируемыми импульсами. Соединение между блоком 4 управления или модулем 14 управления и генератором 3 импульсов может быть проводным соединением, например, по кабелю, или беспроводным соединением. Модуль 14 управления блока 4 управления или сам блок 4 управления может управлять импульсами на основе измеренных данных, получаемых от измерительного модуля 15, и/или на основе данных, сохраненных в модуле 13 памяти.
Фиг. 11 представляет иллюстрацию примера переменных параметров электрических импульсов, которыми может управлять модуль 14 управления, и тем самым ими может управлять блок 4 управления, либо ими может управлять генератор 3 импульсов напрямую. Блок 4 управления или модуль 14 управления или генератор 3 импульсов может быть конфигурирован для управления крутизной переднего фронта 40 или амплитудой 38 импульсов, формируемых генератором 3 импульсов. Предпочтительно, блок 4 управления или генератор 3 импульсов может быть также конфигурирован для управления периодом 37 импульсов и/или шириной 39 электрических импульсов, формируемых генератором 3 импульсов. Предпочтительно, блок 4 управления может быть конфигурирован для динамического управления внутренним сопротивлением генератора 3 импульсов на основе результатов периодических или индивидуальных измерений сопротивления и/или вольтамперной характеристики между совокупностью электродов 2, 2a или между по меньшей мере двумя из совокупности электродов 2, 2a.
Как показано на Фиг. 3, блок 4 управления может обеспечивать сигнал 18 обратной связи, относящийся к положению электродов. Сигнал 18 обратной связи, относящийся к положению электродов, и, следовательно, блок 4 управления может быть конфигурированы для обеспечения обратной связи для приведения положения электрода к заданному нерву, когда по меньшей мере один электрод 2a перемещают или изменяют положение электрода на коже пациента. Обратная связь может быть на основе изменений сопротивления и/или вольтамперной характеристики между по меньшей мере двумя электродами из совокупности электродов 2, 2a. Эта обратная связь может быть основана на изменениях сопротивления и/или вольтамперной характеристики между по меньшей мере одним активным электродом 21, 22 и одним заземляющим электродом из совокупности электродов 2, 2a. Обратная связь может быть реализована как звук, и/или изображение, и/или последовательность изображений, и/или физиологический отклик. Звуковая обратная связь может осуществляться посредством звукового сигнала переменной интенсивности и/или частоты для указанного приведения положения электрода к заданному нерву. Обратная связь в виде изображения или последовательности изображений может быть реализована посредством визуальной сигнализации. Средства визуальной сигнализации могут обеспечиваться посредством дисплея и/или обозначений. Обратная связь по физиологическому отклику может быть реализована, например, посредством вибрационного сигнала обратной связи, имеющего переменную интенсивность/амплитуду и/или частоту. Такие вибрации могут быть переданы на кожу пациента. Вибрации могут быть переданы на кожу пациента непосредственно электродом, перемещаемым или изменяющим свое положение. Вибрации могут быть индуцированы посредством вибрационных элементов, связанных с электродом или интегрированных в электрод.
Устройство 1 для нейромодуляции может также содержать по меньшей мере один детектор 11, конфигурированный для определения отклика тела пациента по меньшей мере на один импульс, формируемый генератором 3 импульсов. Детектор 11, как показано на Фиг. 4, может быть адаптирован для подачи на блок 4 управления сигнала обратной связи по обнаруженному отклику. По меньшей мере один детектор 11 может быть конфигурирован для обнаружения изменения электрической активности, производимой мышцами в ответ по меньшей мере на один импульс, сформированный генератором 3 импульсов. Такой датчик 19 электрической активности мышц может представлять собой электромиографический (EMG) датчик 20.
Указанный по меньшей мере один детектор 11 может представлять собой по меньшей мере один детектор 24 движения, как показано на Фиг. 4. Этот по меньшей мере один детектор 24 движения может быть конфигурирован для определения перемещения пациента и адаптирован для передачи в блок 4 управления сигнала обратной связи по перемещению. Перемещение пациента 28 может происходить в ответ по меньшей мере на один импульс от генератора 3 импульсов. Указанный по меньшей мере один детектор 24 движения может представлять собой акселерометр 25, и/или датчик 26 электрического поля, и/или камеру 27. Предпочтительно, как показано на Фиг. 6, когда в качестве детектора движения используется акселерометр 25, тогда по меньшей мере один акселерометр 25 может быть прикреплен по меньшей мере к одной ступне ноги пациента. В качестве опции, как показано на Фиг. 5, при использовании камеры 27 в качестве детектора 24 движения эта камера располагается поблизости от области воспринимаемого движения в такой ориентации, чтобы детектировать движение. В качестве опции, датчик 26 электрического поля может быть использован в качестве детектора 24 движения. Датчик 26 электрического поля может использовать изменение электрического поля для определения перемещения. В качестве примера такого датчика электрического поля может быть использована интегральная схема контроллера трехмерного распознавания жестов и отслеживания, которая использует электрическое поле для предоставления информации о жестах, а также данных о положении конечности человека в реальном времени. Предпочтительно, может быть использована комбинация детекторов движения, выбранных из группы, содержащей один или более элементов: камера 27, акселерометр 25 и датчик 26 электрического поля. Это может привести к улучшению точности воспринимаемого перемещения, а также создает избыточность обнаружения.
Когда устройство для нейромодуляции содержит по меньшей мере один детектор 11, тогда блок управления может содержать модуль обратной связи детектора, который взаимодействует с указанным по меньшей мере одним детектором 11. Модуль обратной связи детектора может быть конфигурирован для передачи сигнала обратной связи по меньшей мере от одного детектора 11 модулю 14 управления и блоку 4 управления соответственно.
На Фиг. 5 и 6 представлены иллюстрации примеров размещения электродов на пациенте 28, где по меньшей мере один из совокупности электродов 2, 2a может быть наложен на конечность 29 пациента 28, а воспринимаемое перемещение пациента может представлять собой перемещение 30 конечности. Предпочтительно, указанный по меньшей мере один из совокупности электродов 2, 2a содержит заземляющий электрод 23, накладываемый на кожу пациента. Заземляющий электрод 23 может быть наложен на живот пациента 28. В альтернативном варианте заземляющий электрод 23 может быть наложен на другое место, такое как бедро или лодыжка пациента 28. Детектор 24 движения может представлять собой камеру 27 или датчик 26 электрического поля. Детектор движения может определять движение 30 конечности 29. Движение конечности может происходить в ответ по меньшей мере на один импульс от генератора импульсов, поступивший по меньшей мере на один из совокупности электродов. Предпочтительно, указанный по меньшей мере один из совокупности электродов 2, 2a может быть первым и вторым активными электродами 21, 22 как показано на Фиг. 4 и 7. Первый электрод 21 может быть наложен на заднюю поверхность колена первой ноги 29 пациента 28, и второй электрод 22 может быть наложен на заднюю поверхность колена второй ноги 30 пациента. Первый электрод 21 может быть наложен на первую ногу 29 поблизости от лодыжки первой ноги 29 пациента 28. Второй электрод 22 может быть наложен на вторую ногу 30 поблизости от лодыжки второй ноги 30 пациента 28. Как показано на Фиг. 5 или 6, первый электрод 21 и/или второй электрод 22 может быть наложен поблизости от малоберцового нерва, проходящего над лодыжкой.
На Фиг. 7 представлена иллюстрация примера наложения совокупности электродов 2, 2a на обе ноги 29 и 30 пациента. Первый активный электрод 21 из совокупности электродов 2, 2a может быть наложен на заднюю поверхность колена первой ноги 29 пациента 28, а второй активный электрод 22 из совокупности электродов 2, 2a может быть наложен на заднюю поверхность колена второй ноги 30 пациента 28. К каждой из ног 29, 30 может быть прикреплен один из детекторов 24 движения, который может представлять собой акселерометр 25. Каждый из акселерометров 25 может быть прикреплен к ступне одной из ног 29, 30. Предпочтительно, каждый из акселерометров 24 может быть прикреплен к соответствующей ступне в области конца ступни. Показанные на Фиг. 7 стрелки, ассоциированные с активными электродами 21 и 22, указывают возможные перемещения каждого из активных электродов 21, 22 по коже пациента при позиционировании каждого из активных электродов на целевом нерве.
Другой альтернативный вариант расположения электродов показан на Фиг. 8, где по меньшей мере один из совокупности электродов 2, 2a может быть наложен на горло 31 или на лицо пациента 28, а определяемое движение пациента может представлять собой движение по меньшей мере одной лицей мышцы пациента 28. Указанный по меньшей мере один электрод из совокупности электродов 2, 2a, накладываемый на горло 31 или на лицо, может представлять собой по меньшей мере один из активных электродов 21, 22. Движение может определять камера 27, как показано на чертеже, или датчик электрического поля, используемый в качестве детектора движения. Не показанный заземляющий электрод может быть также наложен на голову, подбородок или горло.
На Фиг 12 представлен пример логической схемы, иллюстрирующей вариант 400 способа работы устройства 1 для нейромодуляции. Способ 400 может содержать этап 41 наложения совокупности электродов 2, 2a на кожу пациента 28. Совокупность электродов 2, 2a может содержать по меньшей мере один активный электрод 21, 22 и по меньшей мере один заземляющий электрод 23. По меньшей мере один из активных электродов 21, 22 может быть помещен в вероятное место расположения целевого стимулируемого нерва. Пример такого позиционирования показан на Фиг. 7. Вероятное расположение целевого нерва может находиться на задней стороне колена, на горле или в каком-либо другом подходящем для нейромодуляции месте рядом с целевым стимулируемым нервом. На следующем этапе 42 измеряют сопротивление между совокупностью электродов 2, 2a. Предпочтительно, сопротивление измеряют между по меньшей мере одним из активных электродов 21, 22, помещенным в вероятное место нахождения целевого нерва, который нужно модулировать, и по меньшей мере одним заземляющим электродом. Сопротивление может быть измерено между всеми, некоторыми или по меньшей мере двумя активными электродами 21, 22 и заземляющим электродом 23. Указанные по меньшей мере один активный электрод 21, 22 и/или заземляющий электрод 23 могут представлять собой одиночный электрод 2a или матрицу электродов 2.
На основе результатов измерений на следующем этапе 43 можно определить форму электрических импульсов. По этим результатам измерений можно определить по меньшей мере один из следующих параметров: амплитуда 38, ширина 39 импульса, период 37 и/или восходящий/нисходящий фронты импульса, который должен формировать генератор 3 импульсов.
Следующие этапы могут содержать генерацию, на этапе 44, импульсов генератором импульсов. Импульсы могут иметь форму, найденную на предыдущем этапе. На следующем этапе 45 импульсы могут быть поданы через совокупность электродов 2, 2a на кожу пациента 28.
Одно из преимуществ этого способа состоит в том, что измерения сопротивления или вольтамперной характеристики между по меньшей мере одним из активных электродов 21, 22 и по меньшей мере одним заземляющим электродом 23 позволяют установить оптимальную форму импульсов, формируемых генератором импульсов, индивидуально для каждого пациента. Дополнительный выигрыш может состоять в том, что, измерив сопротивление или вольтамперную характеристику между по меньшей мере одним из активных электродов 21, 22 и по меньшей мере одним заземляющим электродом 23, можно произвести верификацию того, что по меньшей мере один из активных электродов 21, 22 и по меньшей мере один заземляющий электрод 23, либо каждый из совокупности электродов 2, 2a правильно прикреплен к коже пациента 28. Если один из электродов прикреплен к коже пациента неправильно, измерения сопротивления между этим электродом и другим электродом покажет изменение измеренной величины. Это изменение может представлять собой увеличенное сопротивление. Другой выигрыш может состоять в том, что измерение сопротивления или вольтамперной характеристики между по меньшей мере одним из активных электродов 21, 22 и по меньшей мере одним заземляющим электродом 23 может быть использовано для самоконтроля работы устройства 1 для нейромодуляции. Такой самоконтроль может быть осуществлен путем сравнения результатов нескольких последовательных измерений. Для этого могут быть произведены периодические измерения сопротивления или вольтамперной характеристики. В альтернативном варианте, может быть выполнено только одно непериодическое измерение сопротивления или вольтамперной характеристики, и его результат может быть использован для самоконтроля во время работы устройства 1 для нейромодуляции. Например, можно использовать результат первоначального измерения и выполнять непериодические измерения или измерения по запросу через дискретные интервалы. Результаты периодических, непериодических измерений или измерений по запросу сопротивления или вольтамперной характеристики можно комбинировать для достижения устройством 1 для нейромодуляции улучшенной функции самоконтроля.
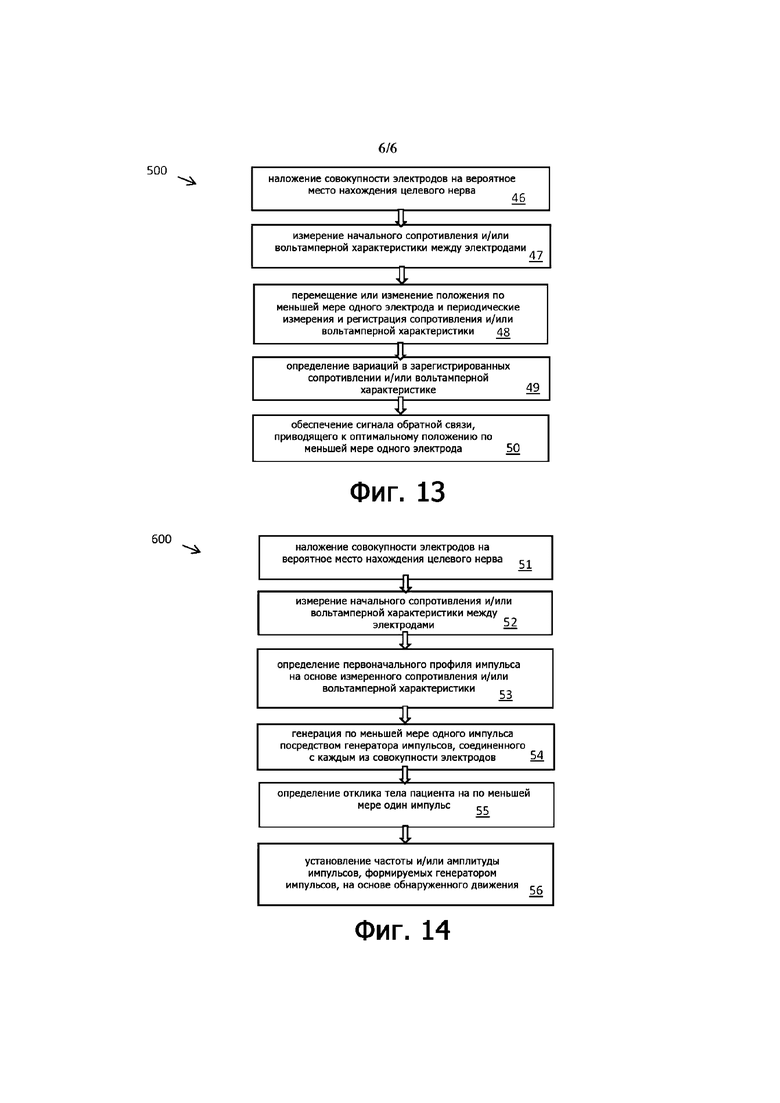
На Фиг. 13, представлен пример логической схемы, иллюстрирующей вариант 500 способа работы устройства 1 для нейромодуляции. Способ 500 может быть использован в сочетании со способом 400, показанным на Фиг. 12, или как часть этого способа 400. Способ 500 может содержать этап 46 наложения совокупности электродов 2, 2a на кожу пациента 28 в вероятной позиции целевого нерва, который нужно модулировать. Совокупность электродов 2, 2a может содержать по меньшей мере один активный электрод 21, 22 и по меньшей мере один заземляющий электрод 23. По меньшей мере один активный электрод 21, 22 может быть расположен в вероятной позиции целевого нерва, который нужно модулировать. Пример такого позиционирования показан на Фиг. 7. Вероятная позиция целевого нерва может находиться на задней стороне колена, на горле или в другом подходящем для нейромодуляции месте поблизости от целевого стимулируемого нерва. На следующем этапе 47 измеряют сопротивление и/или вольтамперную характеристику между электродами 2, 2a. Предпочтительно, сопротивление и/или вольтамперную характеристику измеряют между по меньшей мере одним активным электродом, помещенным в вероятное место расположения целевого нерва, который нужно модулировать, и по меньшей мере одним заземляющим электродом. Сопротивление и/или вольтамперную характеристику можно измерять между всеми, некоторыми или по меньшей мере двумя активными электродами и/или по меньшей мере одним заземляющим электродом. Сопротивление и/или вольтамперную характеристику можно измерять между по меньшей мере двумя активными электродами и заземляющим электродом. По меньшей мере один активный электрод 21, 22 и/или заземляющий электрод могут представлять собой одиночный электрод 2a или матрицу электродов 2.
На следующем этапе 48 по меньшей мере один электрод из совокупности электродов 2, 2a может быть наложен на кожу пациента 28 и может перемещаться или изменять положение, пока выполняются периодические измерения и регистрируются их этапы. Это могут быть измерения сопротивления и/или вольтамперной характеристики между по меньшей мере одним электродом, движущимся или изменяющим положение, и по меньшей мере одним другим электродом из совокупности электродов 2, 2a. Предпочтительно, измерения выполняют между активным электродом 21, 22 и заземляющим электродом 23. Неограничивающий пример перемещения активного электрода поблизости от целевого нерва показан стрелками, ассоциированными с активными электродами 21 и 22 на Фиг. 7.
На следующем этапе 49 могут быть определены вариации в зарегистрированных результатах измерений сопротивления и/или вольтамперных характеристик и сформирован 50 сигнал обратной связи направления к оптимальной позиции по меньшей мере для одного электрода.
Одно из преимуществ этого способа может состоять в том, что результаты измерений сопротивления и/или вольтамперной характеристики позволяют найти правильное положение электрода относительно нерва, который нужно модулировать, тем самым обеспечивая эффективную модуляцию этого нерва.
На Фиг. 14, представлен пример логической схемы, иллюстрирующей другой вариант 600 способа работы устройства 1 для нейромодуляции. Способ 600 может быть использован в сочетании со способами 400 и/или 500, показанными на Фиг. 12 и 13, или как часть этих способов. Способ 600 может содержать этап 51 наложения совокупности нескольких электродов 2, 2a на кожу пациента 28 в месте вероятного нахождения целевого нерва, который нужно модулировать. Совокупность нескольких электродов 2, 2a может содержать по меньшей мере один активный электрод 21, 22 и по меньшей мере один заземляющий электрод 23. Указанный по меньшей мере один активный электрод 21, 22 может быть расположен в вероятном месте нахождения целевого нерва, который нужно модулировать. Пример такого расположения показан на Фиг. 7. Место вероятного расположения целевого нерва может находиться на задней стороне колена, на горле, или другом подходящем для нейромодуляции месте поблизости от целевого стимулируемого нерва. На следующем этапе 52 могут быть измерены сопротивление и/или вольтамперная характеристика между совокупностью электродов 2, 2a. Предпочтительно, сопротивление и/или вольтамперную характеристику измеряют между по меньшей мере одним из активных электродов 21, 22, расположенным в вероятном месте нахождения целевого нерва, который нужно модулировать, и по меньшей мере одним заземляющим электродом 23. Сопротивление и/или вольтамперная характеристика могут быть измерены между всеми, некоторыми или по меньшей мере двумя активными электродами 21, 22 и/или по меньшей мере одним заземляющим электродом 23. Сопротивление и/или вольтамперная характеристика могут быть измерены между всеми, некоторыми или по меньшей мере двумя активными электродами 21, 22 и заземляющим электродом 23. Указанные по меньшей мере один активный электрод 21, 22 и/или заземляющий электрод 23 может представлять собой одиночный электрод 2a или матрицу электродов 2a. На следующем этапе 53 на основе результатов измерений может быть определена первоначальная форма электрических импульсов. По этим результатам измерений можно определить по меньшей мере один из следующих параметров: амплитуда 38, ширина 39 импульса, период 37 и/или восходящий/нисходящий фронты импульса, который должен формировать генератор 3 импульсов. Следующие этапы могут содержать генерацию на этапе 54 по меньшей мере одного импульса генератором импульсов. Указанный по меньшей мере один импульс может иметь первоначальную форму, найденную на предыдущем этапе. Сформированный по меньшей мере один импульс может вызвать отклик тела пациента, который может представлять собой движение пациента 28 в ответ на этот по меньшей мере один электрический импульс, либо отклик тела пациента может представлять собой изменение электрической активности, производимой мышцами. Указанное движение может быть рефлекторным. Когда по меньшей мере один активный электрод 21 расположен под коленом ноги, указанное движение может представлять собой движение 30 самой ноги 29, как показано на Фиг. 5 и 6.
Движение может быть определено на этапе 55 по меньшей мере одним детектором 11, который может быть конфигурирован для определения движения пациента и адаптирован для передачи в блок 4 управления сигнала обратной связи по движению. По меньшей мере один детектор 11 может быть конфигурирован для определения изменений электрической активности, производимой мышцами, и адаптирован для передачи блоку 4 управления обратной связи по этим изменениям.
Предпочтительно, как показано на Фиг. 6, при использовании акселерометра в качестве детектора движения, по меньшей мере один акселерометр 25 может быть прикреплен к ступне по меньшей мере одной из ног 29, 30 пациента. В качестве альтернативы, как показано на Фиг. 5, при использовании камеры 27 в качестве детектора 24 движения, камеру 27 помещают рядом с местом, куда ориентировано обнаруживаемое движение, чтобы определить это движение. В альтернативном варианте в качестве детектора 24 движения может быть использован датчик 26 электрического поля. Этот датчик 26 электрического поля может использовать изменения электрического поля для определения движения.
На следующем этапе 56, на основе принятого отклика тела пациента можно регулировать первоначальную форму по меньшей мере одного импульса, сформированного генератором 3 импульсов. Обнаруженный отклик тела пациента может быть использован для генерации непрерывного или периодического сигнала обратной связи с целью регулирования формы и частоты генерируемых импульсов в процессе нейромодуляции. В качестве опции, обнаруженное движение может быть использовано для регулирования только первоначально установленных частоты и формы по меньшей мере одного импульса.
Одно из преимуществ этого способа состоит в том, что частоту и форму импульсов, формируемых генератором импульсов, оптимизируют либо только в начале, либо в процессе нейромодуляции, тем самым обеспечивая более эффективную и безопасную нейромодуляцию.
Тогда как для описания вариантов настоящего изобретения могут быть использованы различные термины для указания пространственных соотношений и направления, такие как верх, низ, ниже, средний, боковой, горизонтальный, вертикальный, передний и другие подобные термины, понятно, что такие термины относятся только к ориентации, показанной на чертежах. Ориентация может быть перевернута, повернута или изменена другим способом, так что верхняя часть стала нижней частью и наоборот, горизонтальный стал вертикальным и т.п.
Следует понимать, что приведенное выше описание предназначено быть иллюстрациями, а не ограничениями. Например, приведенные выше варианты (и/или их аспекты) могут быть использованы в комбинациях одни с другими. В дополнение к этому, могут быть внесены многочисленные модификации для адаптации конкретной ситуации или материала к положениям различных вариантов настоящего изобретения без отклонения от их объема. Тогда как размеры и типы материалов, описываемые здесь, предназначены для определения параметров различных вариантов изобретения, эти варианты никоим образом не являются ограничениями, а представляют собой только примеры. Многие другие варианты станут ясны специалистам в рассматриваемой области после просмотра приведенного выше описания. Объем различных вариантов настоящего изобретения следует, поэтому, определять со ссылками на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, относящихся к этой формуле. В прилагаемой формуле изобретения такие термины, как «включающий» и «в котором» используются в качестве простых английских эквивалентов соответствующих терминов «содержащий» и «где». Более того, такие термины, как «первый», «второй», третий и т.д., используются просто в качестве ярлыков и не имеют целью накладывать нумерационные ограничения на соответствующие им объекты. Далее, ограничения следующей формулы изобретения не записаны в формате «средство плюс функция» и не должны быть интерпретированы на основе 35 U.S.C. § 112(f), если и до тех пор, пока в таких ограничениях формулы изобретения прямо не используется фраза «средства для», за которой следует заявление о функции, не содержащее дальнейшей структуры.
Это письменное описание использует примеры для представления различных вариантов настоящего изобретения, включая наилучший способ реализации, и для того, чтобы позволить любым специалистам в рассматриваемой области практически реализовать различные варианты настоящего изобретения, включая изготовление и использование любых устройств или систем и осуществление любых входящих сюда способов. Патентуемый объем различных вариантов настоящего изобретения определен формулой изобретения и может содержать другие примеры, очевидные для специалистов в рассматриваемой области. Такие другие примеры должны попадать в объем формулы изобретения, если эти другие примеры содержат структурные элементы, не отличающиеся от буквального содержания формулы изобретения, или эти примеры содержат эквивалентные структурные элементы с несущественными отличиями от буквального содержания формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЕЛЕКТИВНОЙ НЕЙРОМОДУЛЯЦИИ | 2021 |
|
RU2812039C1 |
| УСТРОЙСТВО И СПОСОБ ЛЕЧЕНИЯ С ПОМОЩЬЮ НЕЙРОМОДУЛЯЦИИ | 2016 |
|
RU2742502C2 |
| КАТЕТЕРНЫЕ УСТРОЙСТВА, СОДЕРЖАЩИЕ БЛОКИ ИЗ НЕСКОЛЬКИХ ЭЛЕКТРОДОВ, ДЛЯ ПОЧЕЧНОЙ НЕЙРОМОДУЛЯЦИИ И СООТВЕТСТВУЮЩИЕ СИСТЕМЫ И СПОСОБЫ | 2013 |
|
RU2601906C2 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ НЕИНВАЗИВНОЙ НЕЙРОРЕАБИЛИТАЦИИ ПАЦИЕНТА | 2015 |
|
RU2649512C1 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ НЕИНВАЗИВНОЙ НЕЙРОРЕАБИЛИТАЦИИ ПАЦИЕНТА | 2018 |
|
RU2686950C1 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ НЕИНВАЗИВНОЙ НЕЙРОРЕАБИЛИТАЦИИ ПАЦИЕНТА | 2015 |
|
RU2665385C1 |
| Устройство и способ для электростимуляции нервной ткани | 2023 |
|
RU2812398C1 |
| ЛЕЧЕНИЕ | 2009 |
|
RU2530754C2 |
| ЭЛЕКТРОД ДЛЯ НЕЙРОМОДУЛЯЦИИ В СБОРЕ | 2018 |
|
RU2746456C1 |
| ЭЛЕКТРОД ДЛЯ НЕЙРОМОДУЛЯЦИИ В СБОРЕ | 2018 |
|
RU2771731C2 |
Группа изобретений относится к медицине, а именно к устройству для нейромодуляции и способу его установки. Устройство для нейромодуляции содержит электроды, каждый из которых содержит электропроводный элемент для наложения на кожу пациента, электрически соединенный с каждым электродом генератор импульсов и блок управления, соединенный с генератором импульсов. Блок управления выполнен с возможностью периодического измерения сопротивления и/или вольтамперной характеристики между электродами, а также с возможностью управления формой электрических импульсов на основе измеренного сопротивления и/или вольтамперной характеристики и с возможностью динамического управления внутренним сопротивлением генератора импульсов на основе результатов периодических измерений сопротивления и/или вольтамперной характеристики. При этом накладывают электроды на кожу пациента в место возможного нахождения целевого модулируемого нерва. Инициируют калибровку первоначального положения посредством измерения сопротивления и/или вольтамперной характеристики между электродами. Перемещают или изменяют положение электродов, в то время как периодически измеряют и регистрируют сопротивление и/или вольтамперную характеристику между электродами. Определяют вариацию зарегистрированного сопротивления и/или зарегистрированной вольтамперной характеристики. Достигается динамическая адаптация устройства для нейромодуляции к изменяющимся условиям пациента, на которого воздействуют нейромодулятором, а также нахождение правильного положения электрода относительно нерва, который нужно модулировать, тем самым обеспечивая эффективную модуляцию этого нерва за счет эффективного направления сигнала нейромодуляции от генератора сигналов в целевой нерв. 2 н. и 12 з.п. ф-лы, 14 ил.
1. Устройство (1) для нейромодуляции, содержащее:
совокупность электродов (2, 2a), каждый электрод из совокупности электродов содержит электропроводный элемент (32), накладываемый на кожу пациента (28);
генератор импульсов (3), электрически соединенный с каждым электродом из совокупности электродов (2, 2a), для передачи электрических импульсов на указанную совокупность электродов; и
блок управления (4), соединенный с генератором импульсов и выполненный с возможностью периодического измерения сопротивления (16) и/или вольтамперной характеристики (17) между по меньшей мере двумя электродами из совокупности электродов, при этом блок управления выполнен с возможностью управления формой электрических импульсов на основе измеренного сопротивления и/или вольтамперной характеристики, при этом блок управления выполнен с возможностью динамического управления внутренним сопротивлением генератора импульсов на основе результатов периодических измерений сопротивления и/или вольтамперной характеристики.
2. Устройство для нейромодуляции по п. 1, дополнительно содержащее по меньшей мере один детектор, выполненный с возможностью определения отклика тела пациента по меньшей мере на один импульс, сформированный генератором импульсов, при этом детектор также выполнен с возможностью подачи на блок управления сигнала обратной связи по обнаруженному отклику.
3. Устройство для нейромодуляции по п. 2, отличающееся тем, что по меньшей мере один детектор представляет собой по меньшей мере один детектор движения (24), выполненный с возможностью определения движения тела пациента и выполненный с возможностью подачи в блок управления сигнала обратной связи по движению, при этом указанное движение тела пациента является откликом на указанный по меньшей мере один импульс от генератора импульсов.
4. Устройство для нейромодуляции по п. 3, отличающееся тем, что указанный по меньшей мере один детектор движения содержит акселерометр (25), и/или датчик электрического поля (26), и/или камеру (27).
5. Устройство для нейромодуляции по любому из пп. 1-4, отличающееся тем, что по меньшей мере один из совокупности электродов выполнен с возможностью его наложения рядом по меньшей мере с одним периферийным нервом тела пациента.
6. Устройство по любому из пп. 1-5, отличающееся тем, что блок управления (4) выполнен с возможностью обеспечения сигнала обратной связи для приведения положения электрода к заданному нерву, когда по меньшей мере один электрод перемещается или изменяет положение на коже пациента, при этом подаваемый сигнал обратной связи основан на изменениях сопротивления и/или вольтамперной характеристики между по меньшей мере двумя электродами из указанной совокупности электродов.
7. Устройство по любому из пп. 1-6, отличающееся тем, что блок управления выполнен с возможностью управления крутизной восходящего фронта (7) электрических импульсов и/или амплитудой (10) электрических импульсов.
8. Устройство по любому из пп. 1-7, отличающееся тем, что блок управления также выполнен с возможностью управления периодом импульсов (8) и/или шириной импульсов (9) для указанных электрических импульсов.
9. Устройство по любому из пп. 1-8, отличающееся тем, что указанная совокупность электродов образована по меньшей мере одной матрицей электродов, содержащей совокупность электропроводных элементов (32), электрически изолированных один от другого, при этом каждый из электропроводных элементов выполнен с возможностью нанесения его на кожу пациента.
10. Способ установки устройства для нейромодуляции по любому из предшествующих пунктов, характеризующийся тем, что воздействуют на устройство для нейромодуляции для выполнения следующих действий:
наложение (46) совокупности электродов на кожу пациента, при этом по меньшей мере один электрод из совокупности электродов помещают в место возможного нахождения целевого модулируемого нерва;
инициирование (47) режима калибровки и калибровка первоначального положения посредством измерения сопротивления и/или вольтамперной характеристики между по меньшей мере двумя электродами из указанной совокупности электродов;
перемещение или изменение положения (48) указанного по меньшей мере одного электрода из совокупности электродов, наложенных на кожу пациента, в то время как периодически измеряют и регистрируют сопротивление и/или вольтамперную характеристику между по меньшей мере двумя электродами указанной совокупности электродов; и
определение (49) вариации зарегистрированного сопротивления и/или зарегистрированной вольтамперной характеристики.
11. Способ по п. 10, в котором дополнительно
на основе указанных вариаций обеспечивают (50) сигнал обратной связи, приводящий к оптимальному положению указанного по меньшей мере одного электрода из совокупности электродов по отношению к целевому модулируемому нерву.
12. Способ по п. 11, в котором также генерируют слышимый звук или представление изображения для генерации сигнала обратной связи с целью направления по меньшей мере одного из совокупности электродов к оптимальной позиции.
13. Способ по любому из пп. 10-12, в котором также
определяют (53) первоначальный профиль импульса для нейромодуляции на основе измеренного сопротивления и/или вольтамперной характеристики.
14. Способ по любому из пп. 10-13, в котором также
формируют (54) по меньшей мере один импульс посредством генератора импульсов, соединенного с каждым из совокупности электродов; и
определяют (55) отклик тела пациента на указанный по меньшей мере один импульс, сформированный генератором импульсов; и
устанавливают (56) частоту и/или амплитуду указанных электрических импульсов.
| US 2019083784 A1, 21.03.2019 | |||
| US 2017209694 A1, 27.07.2017 | |||
| US 2014296934 A1, 02.10.2014 | |||
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496305C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 0 |
|
SU170403A1 |
| 0 |
|
SU153341A1 | |
