Изобретение относится к области судостроения и касается вопросов создания средств для осуществления подводных подъемно-транспортных операций, таких как доставка полезной нагрузки в заданную точку акватории в подводном положении и установка ее на дно, подъем на поверхность подводных объектов, в том числе промыслового оборудования, подъем со дна и перемещение подводных объектов подо льдом без всплытия на поверхность и т.д.
При выполнении подводных подъемно-транспортных операций стадия отрыва объекта от грунта является наиболее сложной. Любая подобная операция не обходится без взаимодействия с грунтом либо объекта операции, либо подъемно-транспортного средства, либо того и другого. Контакт с грунтом приводит к возникновению сил присоса, которые обусловлены свойствами грунта, формой поверхности контакта, степенью проникновения объекта в грунт, его пространственной ориентацией и т.д.
Совокупность факторов, определяющих силы присоса, включает адгезионные и когезионные эффекты на поверхности контакта и в прилегающем слое грунта, горное давление и дополнительную весовую нагрузку (например, при заносе объекта), фильтрационные эффекты в грунте, гидродинамические эффекты в пограничной области между грунтом и объектом и т.д. В большей или меньшей степени указанные факторы действуют всегда, поэтому подъемное усилие, соответствующее началу отрыва от грунта и перехода из состояния покоя во взвешенное состояние, всегда больше подводного веса объекта. Длительность процесса перехода существенно влияет на характер изменения подъемного усилия в процессе отрыва. Параметры пространственного положения и движения объекта в момент завершения отрыва и конфигурация действующих сил определяют начальные условия движения системы «объект - подъемно-транспортное средство» в толще воды на стадии транспортировки.
Силы присоса являются возмущающим фактором, которому свойственна значительная неопределенность и большой разброс значений (примерно от 0.05 до 0.3 и более от веса объекта). Это обстоятельство существенно влияет на технический облик и осложняет функционирование средств подводных подъемно-транспортных операций.
В отношении функционирования подъемно-транспортных средств действие сил присоса является дезорганизующим фактором, нарушающим ведение подводных работ, которые должны укладываться в определенные временные рамки. Поэтому, в отличие от судоподъемных операций, представляющих собой самостоятельный цикл работ, такой способ уменьшения возмущающего действия сил присоса как замедление процесса отрыва не подходит для подводных подъемно-транспортных операций, которые интегрированы в другие технологические циклы.
В отношении конструкции неопределенность сил присоса приводит к функциональной и параметрической избыточности подводных подъемно-транспортных средств, введению разного рода запасов, нагромождению вспомогательных подсистем, усложнению процессов и систем регулирования и управления и т.д. Кроме того, неопределенность сил присоса может решающим образом повлиять на технологию осуществления подъемно-транспортной операции, особенно, когда параметры операции близки к предельным значениям для имеющихся технических средств. Наиболее близким по времени и известным примером такого рода является подъем АПК «Курск», когда переоценка сил присоса принципиально повлияла на выбор способа подъема и технический облик судоподъемного комплекса.
Можно различать два типа технических решений в плане учета сил присоса при формировании технического облика подводных подъемно-транспортных средств: решения, направленные на компенсацию влияния сил присоса; решения, направленные на уменьшение сил присоса как таковых. Решения того и другого типа взаимно дополняют друг друга и направлены на минимизацию дестабилизирующего влияния этих сил на динамику системы «объект - подъемно-транспортное средство», однако способы достижения соответствующего технического результата существенно различны.
Традиционные способы уменьшения величины сил присоса подразумевают либо устранение грунта из области контакта, либо активное воздействие на грунт вблизи объекта с целью изменения его состояния (например, перевод в жидкотекучее состояние), либо изменение параметров пограничного слоя между объектом и грунтом, например, за счет насыщения этого слоя продуктами электролиза морской воды и т.д.
Способ устранения грунта из области контакта явно ограничен, так как без достаточной площади опоры объект операции может потерять устойчивое положение, тем более на слабых, предельно обводненных донных грунтах (что недопустимо).
Способ активного воздействия на грунт с использованием тех или иных физических эффектов не устраняет весь комплекс факторов присоса, упомянутых выше. В то же время, например, активное воздействие на грунт (вибрация, взрыв) чревато негативными последствиями для подводных объектов, расположенных в непосредственной близости от места проведения подъемно-транспортных операций (что неприемлемо в сфере технологических применений). Способы активного воздействия могут быть объединены в общий класс. Все они более или менее усложняют подводное подъемно-транспортное средство, за счет расширения номенклатуры применяемых технологий, систем и устройств. Поэтому при всей оригинальности эти способы проблематичны для широкого применения.
Конструктивное объединение различных способов, очевидно, требует их взаимной адаптации на уровне элементов подъемно-транспортного средства, что, как правило, понижает их эффективность хотя бы из-за снижения коэффициента использования. Поэтому в области судоподъема, который является одним из видов подъемно-транспортных операций и который является сферой формирования предпосылок для развития подводных подъемно-транспортных технологий, более предпочтительным всегда был мобилизационный принцип формирования необходимого комплекса технических средств. В прошлом известно лишь несколько примеров создания специализированных судоподъемных комплексов (для подводных лодок) на основе плавучих платформ. В настоящее время таких комплексов в мире практически не существует.
Другой тип решений, которые направлены на уменьшение влияния сил присоса, реализуется не на уровне механизмов присоса, а на уровне принципа действия подводного подъемно-транспортного средства в целом. То есть на уровне его архитектуры и основных подсистем. Эти решения связанны с функциями более высокого уровня по сравнению с факторами присоса.
Импульс силы присоса включает две составляющие: первая обусловлена непосредственно факторами и механизмами присоса; вторая - последействием избыточной подъемной силы, которая необходима для отрыва объекта от грунта и которая сохраняется в течение некоторого времени вследствие инерционности действия источника подъемной силы. Способы уменьшения последействия также можно разделить на две группы. К первой группе относятся технические решения, основанные либо на целенаправленном подборе (актуализации) собственных свойств источника силы который действует спонтанно, либо на управлении источником силы, адекватном динамике процесса отрыва. Ко второй группе относятся способы компенсации импульса последействия.
В первом случае степень уменьшения последействия зависит от инерционности изменения состояния источника силы. Минимальная инерционность, очевидно, свойственна неподвижным упругим источникам подъемной силы типа жестких опор, установленных на грунте. Несоизмеримо более инерционными источниками силы являются частично или полностью погруженные водоизмещающие тела. Например, действие отрывных понтонов (используемых при понтонном способе подъема) начинает затухать лишь после их выхода на поверхность моря. Полностью погруженные понтоны наиболее инерционны, так как изменение их подъемной силы возможно лишь за счет функционирования балластной системы того или иного типа. При подъеме крупных объектов необходимы весьма производительные балластные системы, что вызывает сложности и накладывает ограничения на параметры подобных подъемных систем.
Компенсационный способ уменьшения влияния импульса последействия, очевидно, требует включения в состав подъемно-транспортного средства таких элементов, совокупное действие которых принадлежит тому же уровню (в иерархии действия подъемно-транспортного средства), которому принадлежит действие источника подъемной силы. Совокупное действие компенсирующих элементов должно быть направленно против избыточной подъемной силы. Так, если источником подъемной силы является погруженный понтон, то для компенсации импульса последействия подъемно-транспортное средство может быть оснащено, например, тяжеловесными грузами или достаточно мощными и динамичными движителями вертикальной тяги. Поскольку источник силы относится к наиболее высокому уровню в структуре действия подъемно-транспортного средства, технические решения, обеспечивающие компенсационный способ, затрагивают параметры и архитектуру подъемно-транспортной системы в целом. В частности, применение грузов для компенсации последействия приводит к увеличение водоизмещения подводного подъемно-транспортного судна и т.д. Таким образом, уменьшение импульса последействия в любом случае требует усложнения подводных подъемно-транспортных средств. Выбор способа достижения соответствующего технического результата в первую очередь определяется свойствами источника подъемной силы.
Включение в структуру взаимодействий подъемно-транспортной системы в качестве источника подъемной силы донного грунта и, соответственно, несмещаемых опорных конструкций приводит к созданию жестких систем. В таких системах положение объекта не зависит от величины действующих сил (в пределах допустимых значений), но полностью контролируется внутренней кинематикой подъемно-транспортного средства. Противоположными в этом отношении - мягкими, являются системы, основанные на использовании плавучих платформ, в которых положение объекта определяется действующими силами (взаимодействием между объектом и платформой, а также их взаимодействиями с водной средой).
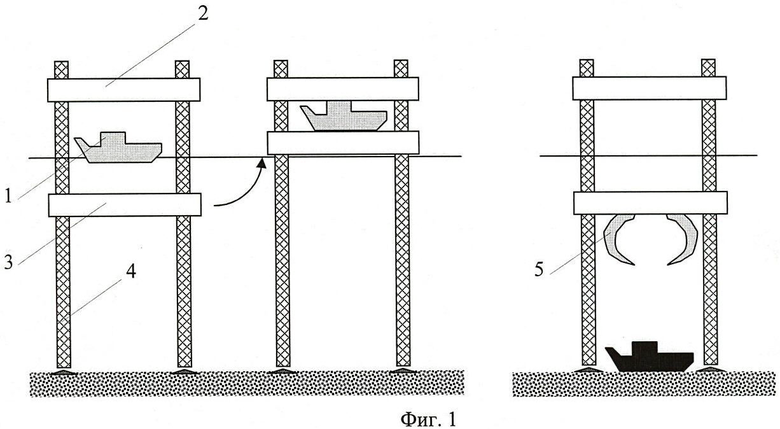
Последействие в жестких системах, практически, не вызывает дополнительных движений объекта. Пример жесткой подъемной системы показан на рисунке (Фиг.1) (АС СССР №1615031, опубл. 23.12.1990, бюл. №47). Система позволяет реализовать подъем объекта 1 с поверхности воды на некоторую высоту с помощью самоподъемной буровой установки 2, оснащенной платформой 3 для размещения объекта.
Кинематический контроль объекта в данном случае обеспечивается за счет опор 4 самоподъемной буровой установки, опирающейся на грунт.
Определенные конструктивные изменения данного устройства, в частности оснащение платформы 3 захватными устройствами 5, очевидно, позволяют применить решение по АС №1615031 для подъема подводных объектов с глубин, ограниченных высотой опор.
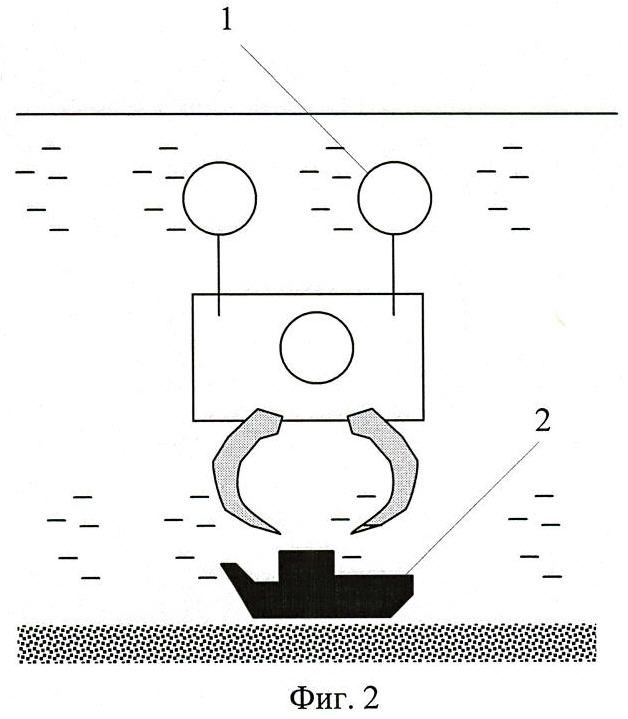
К мягким системам можно отнести, например, понтонный способ подъема и соответствующие подъемные системы (Фиг.2). По сравнению с жесткими системам последействие мягких систем значительно больше в силу большей продолжительности действия избыточной подъемной силы, необходимой для отрыва объекта от грунта. Действие отрывных понтонов 1 будет продолжаться от момента отрыва объекта 2 от грунта до выхода понтонов 1 на поверхность. Чтобы уменьшить последействие и дополнительное движение объекта (которое теоретически должно быть плоскопараллельным и равномерным), отрывные понтоны размещают на малой глубине.
Движение объекта под водой можно осуществить либо путем присоединения к нему движителя, который активно взаимодействует с относительно неподвижной внешней средой, либо путем перемещения объекта в рабочем пространстве вмещающего движителя, неподвижного в пространстве.
Подводное подъемно-транспортное средство, очевидно, должно осуществлять как стадию отрыва, так и стадию транспортировки объекта. Соответственно, оно должно сочетать признаки присоединяемого и вмещающего движителя. Жесткие системы, обеспечивающие кинематический контроль объекта, принципиально ограничивают высоту (глубину) подъема, поэтому подводная подъемно-транспортная система должна функционировать как жесткая лишь на стадии перехода объекта из состояния покоя во взвешенное состояние и обратно (в зависимости от цели проводимой операции).
Традиционные судоподъемные средства по принципу действия являются вмещающим движителям. В рамках существующей классификации их можно отнести к крановому или механическому способам подъема. Известен также комбинированный способ, который также предполагает использование подъемных механизмов, но при этом часть необходимой подъемной силы создается с помощью погруженных понтонов. С одной стороны, это позволяет уменьшить необходимую грузоподъемность подъемных механизмов, а с другой, обеспечивает контроль положения объекта в процессе его перехода во взвешенное состояние при отрыве от грунта.
Действие традиционных технологий сводится к подъему или спуску объекта без изменения его местоположения (за редким исключением, когда объект можно транспортировать на весу или при ступенчатом подъеме, когда перед каждой ступенью подъема объект перемещают и укладывают на грунт на более мелком месте). Достоинством традиционной судоподъемной технологии является относительная простота реализации стадии отрыва, так как создание избыточной подъемной силы для преодоления сил присоса происходит самопроизвольно, за счет изменения осадки плавучей платформы, на которой установлены подъемные механизмы, а дополнительное движение объекта определяется колебаниями системы «объект - подъемное средство», вызванными импульсом последействия. При этом энергия импульса последействия рассеивается в колебательном процессе.
Колебания плавучей платформы являются существенным недостатком традиционных способов подъема, которые связаны не только импульсом последействия, но и волнением поверхности моря. Функционирование таких систем требует включения в силовую связь между объектом и платформой демпфирующих и ударопоглощающих устройств для обеспечения приемлемого уровня динамических нагрузок в силовых связях.
Демпфирующие устройства или компенсаторы имеют ограниченную жесткость и рабочий ход. В связи с этим плавучие подъемные системы нельзя использовать, если жесткость компенсаторов окажется недостаточной для преодоления сил присоса. Нельзя применять плавучие комплексы в тех случаях, когда волнение моря вызывает недопустимо большую амплитуду вертикальной качки платформы. Эти обстоятельства, наряду с подверженностью плавучих платформ ледовым нагрузкам, не позволяют применять традиционные подъемные средства для круглогодичного ведения подводных подъемно-транспортных операций в условиях ледовитых морей.
В отношении факторов присоса и последействия традиционные технологии направлены на компенсацию их влияния на параметры подъемной операции за счет реактивного взаимодействия подъемного комплекса либо с грунтом, либо с водной средой, соответственно через опоры или плавучую платформу.
Подледные и подводные подъемно-транспортные средства могут быть созданы только на основе подводных платформ. Однако в отношении контроля положения объекта на стадии отрыва подводное судно типа подводной лодки не обладает функциональными свойствами жестких или мягких вмещающих подъемных систем. Его взаимодействие с внешней средой должно быть полностью уравновешено. Традиционная подводная лодка не может быть источником подъемной силы. Наличие двух качественно различных состояний объекта и двух стадий единого процесса подъема - транспортировки требует, чтобы принцип действия подводного судна для осуществления подводных подъемно-транспортных операций интегрировал свойства жесткой вмещающей подъемной системы и присоединяемого движителя, который обеспечивает подводную транспортировку объекта в режиме подводной лодки.
При использовании подводного судна, в качестве присоединяемого движителя для компенсации импульса последействия на стадии отрыва объекта от грунта возможно использование натяжных связей и тяжеловесных грузов. Как уже было отмечено, подводное судно для подъемно-транспортных операций должно иметь существенно большее подводное водоизмещение по сравнению с аналогичной по параметрам подводной лодкой. Избыток водоизмещения должен покрывать весь возможный диапазон сил присоса, то есть до 30% и более от веса объекта. С учетом необходимости сохранения натяжения связей для гарантии стабильности положения системы «объект - судно» после отрыва грузоподъемность подводного судна должна быть увеличена более чем на 30% по сравнению с номинальным весом объекта. Кроме того, при малых глубинах, судно на натяжных опорах будет чувствительно к волнению поверхности моря, что нежелательно при выполнении подводных подъемно-транспортных операций, связанных, например, с монтажными работами и т.д.
Отказ от использования жестких опор или натяжных связей для подводного судна предполагает весьма динамичное управление его плавучестью. В частности, после отрыва объекта от грунта для уменьшения импульса последействия необходим быстрый прием забортной воды в балластные цистерны, что существенно усложняет соответствующие системы подводного судна и увеличивает риски. Однако наиболее важный недостаток безопорных подводных подъемно-транспортных средств состоит в том, что до начала быстрого приема балласта после отрыва объекта от грунта необходимо знать положение равнодействующей подъемных сил и центра тяжести системы «объект - судно», но это принципиально невозможно до завершения динамического процесса перехода объекта во взвешенное состояние. Возможным решением проблемы может быть оснащение судна быстродействующей системой динамической стабилизации, однако этот путь весьма проблематичен, учитывая массогабаритные параметры, как самого судна, так и объекта операции. Технологические применения подводных подъемно-транспортных судов требуют гарантированной точности движений системы «объект - судно», чтобы избежать нештатных и аварийных ситуаций.
Необходимым условием гарантии обеспечения кинематического контроля объекта на стадии отрыва и стабильных начальных условий движения подводного судна с объектом на борту является разделение во времени качественно различных стадий подъемно-транспортной операции, что, по сути, имеет место в традиционных способах подъема.
Известно техническое решение «Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления» (патент РФ №2099237, опубл. 20.12.1997) - принято за прототип.
Известный способ выполнения подводных подъемно-транспортных операций состоит в том, что на дно опускают устройство для подъемно-транспортных операций, которое устанавливают над находящимся на дне объектом, затем захватывают его, а затем осуществляют подъем и транспортировку. Причем после захватывания объекта его сначала выводят из соприкосновения с грунтом при помощи механизмов, входящих в состав устройства, затем балластировкой понтона указанного устройства осуществляют уравновешивание сил и моментов, действующих на устройство после отрыва объекта от грунта. Указанные операции выполняют при опирании устройства на грунт, а подъем и транспортировку начинают после завершения балластировки.
Известное по патенту РФ №2099237 устройство для осуществления подводных подъемно-транспортных операций включает в себя размещенные на несущей металлоконструкции с опорами и захватами понтон с телеуправляемым вентиляционным клапаном вверху и отверстием внизу для сообщения с внешней средой и вытеснительную систему. При этом понтон выполнен прочным и состоит, по крайней мере, из одного изолированного отсека, а вытеснительная система включает в себя испаритель и соединенный с ним источник криогенного рабочего тела. Нижнее отверстие для сообщения с внешней средой оборудовано управляемым затвором. Опоры металлоконструкции выполнены поворотными и снабжены башмаками, имеющими системы замораживания грунта, сообщенные трубопроводами с источником криогенного рабочего тела. Устройство снабжено приводом для вертикального перемещения захватов.
Основные недостатки известного технического решения заключаются в следующем.
1. После того как система «объект - устройство» будет уравновешена, движение системы возможно лишь при условии преодоления сил присоса, действующих на опорные башмаки устройства.
2. При низкой несущей способности донного грунта и большом весе объекта площадь опорных башмаков может оказаться значительной. Это потребует большого бортового запаса криогенного рабочего тела для упрочнения грунта под башмаками методом замораживания. Кроме того, использование общего запаса криогенного рабочего тела и для упрочнения грунта, и для создания подъемной силы приводит к возникновению функциональных ограничений в структуре действия устройства. Например, при большой глубине, предельном для устройства весе объекта и слабом грунте запас рабочего тела может оказаться недостаточным для обеспечения необходимой жесткости опирания устройства на стадии отрыва объекта от грунта и т.д.
3. На стадии подъема системы «объект - устройство» большая площадь опорных башмаков приводит к тем же проблемам преодоления сил присоса и нивелирования импульса последействия, что и при отрыве объекта от грунта. Однако, если отрыв объекта реализуется в условиях жесткого опирания устройства на грунт, то отрыв от грунта самого устройства реализуется в условиях мягкого взаимодействия системы с водной средой, что неизбежно повлечет импульс последействия и значительные дополнительные движения устройства вместе с объектом, со всеми вытекающими последствиями и рисками.
4. В соответствии с принципом действия устройства избыточная плавучесть, необходимая для отрыва системы «объект - устройство», очевидно, не должна нарушать балансировку системы. Но балансировка устройства неизбежно происходит в условиях полной неопределенности значений отрывных усилий возможных для каждого из опорных башмаков устройства. Поэтому в процессе увеличения плавучести системы в некоторый момент гарантированно произойдет отрыв от грунта только одного из опорных башмаков. Чтобы не допустить крена и дифферента устройства необходим «залповый» прием воды обратно во все его балластные отсеки. После этого система останется в равновесии, но не сможет всплыть. Процесс отрыва устройства от грунта необходимо будет повторять до тех пор, пока не произойдет практически одновременного отрыва от грунта всех башмаков устройства. Таким образом, естественный разброс сил присоса существенно усложняет функционирование устройства, вносит дополнительные нагрузки на его металлоконструкцию, создает опасность возникновения неконтролируемых движений системы «объект - устройство», требует размещения увеличенного запаса криогенного рабочего тела (для обеспечения повторенных попыток отрыва) и т.д.
5. Необходимость многократного повторения отрыва системы «объект - устройство» не гарантирует необходимой строгости временных рамок и надежности проведения подводной подъемно-транспортной операции. Важно также то, что на процесс отрыва будет оказывать влияние придонное течение, которое внесет дополнительную неравномерность в условия взаимодействия с грунтом и может привести к сносу устройства.
6. Помимо того, что при каждой попытке отрыва от грунта возникнет возможность сноса устройства, принцип действия устройства существенно ограничивает допустимую скорость придонного течения. Величина восстанавливающего момента, препятствующего опрокидыванию устройства с объектом под действием гидродинамических сил придонного течения, неизбежно принимает минимальное значение, определяемое остойчивостью системы «объект - устройство» в подводном положении, когда значение плавучести устройства переходит из области отрицательных значений в область положительных значений. На этой стадии восстанавливающий момент, обусловленный подводным весом системы «объект - устройство», также принимает нулевое значение, и резко возрастает опасность опрокидывания. Таким образом, применение устройства возможно лишь при весьма малых скоростях придонного течения, что ограничивает его технологические применения.
Задачей предлагаемого изобретения является обеспечение устойчивого равновесия системы «объект - подводное судно» на всех стадиях подводной подъемно-транспортной операции в условиях действия придонного течения, а также минимизация зависимости параметров подводных транспортных операций от условий природной среды, с целью поддержания эффективного функционирования подводных технологий, включающих подводные подъемно-транспортные операции.
Достижение указанного технического результата обеспечивается за счет следующих признаков способа осуществления подъемно-транспортных операций.
При установке судна на дно ему придают минимальную, но достаточную отрицательную плавучесть, обеспечивающую статическое равновесие судна на грунте при действии опрокидывающего придонного течения, а перед выведением объекта из контакта с грунтом судну придают положительную плавучесть, которая меньше подводного веса объекта на величину указанной минимальной, но достаточной величины, а непосредственно перед подъемом судна с объектом, после уравновешивания действующих на судно сил и моментов увеличивают с максимально возможной быстротой плавучесть судна, для чего временно опускают на грунт часть твердого балласта судна, которая выполнена в виде цепи шарнирно соединенных между собой грузов, при этом одновременно и пропорционально весу опущенного на грунт твердого балласта уменьшают площадь контакта указанных башмаков с грунтом путем их синхронного отрыва от грунта, осуществляемого разворотом преимущественно в вертикальное положение контактирующих с грунтом поверхностей башмаков, используя усилия, создаваемые механизмами, имеющимися на судне, а после всплытия судна с объектом на высоту, при которой приобретенная положительная плавучесть уравновешивается весом участков указанной цепи, поднятых с грунта вместе с судном, оставшийся на грунте твердый балласт возвращают на борт, сохраняя достигнутую высоту подъема судна балластировкой, после чего осуществляют движение судна с объектом в режиме подводной лодки.
Для осуществления способа по изобретению используется подводное судно в виде двухкорпусной подводной лодки, а в качестве упомянутой металлоконструкции использован ее проницаемый корпус, а отсеки упомянутых прочных понтонов соединены с помощью арматуры судна с его балластной системой, кроме того, в проницаемом корпусе расположен по меньшей мере один грузовой отсек, а упомянутые захваты с приводами вертикального движения размещены внутри грузового отсека и установлены на домкратах, кроме того, указанные опоры оснащены приводами поворота башмаков, преимущественно гидравлическими, причем судно снабжено механизмами для спуска на грунт и возвращения на борт части его твердого балласта, которая для этого выполнена в виде цепей шарнирно соединенных между собой грузов, а также подруливающими устройствами.
Преимущества предлагаемого технического решения в основном состоят в том, что оно позволяет.
- Осуществить подъемно-транспортную операцию в условиях слабых грунтов и придонного течения.
- Минимизировать подводное водоизмещение подъемно-транспортного судна.
- Обеспечить равновесие системы «объект - судно» как в процессе отрыва объекта от грунта, так и при отрыве от грунта системы «объект - судно».
- Минимизировать опасность возникновения нештатных и аварийных ситуаций в процессе проведения подводных работ и обеспечить безопасность подъема и транспортировки подводных объектов.
- Максимально снизить вероятность просадки грунта под опорами судна.
- Минимизировать величину и неопределенность временных затрат при использовании подводного судна.
Сущность изобретения поясняется рисунком на Фиг.3, на которой представлено подводное судно для осуществления предлагаемого способа.
Подводное судно 1 включает металлоконструкцию 2 с находящимся в ней прочным понтоном 3. Понтон имеет, по меньшей мере, один изолированный отсек 4. Металлоконструкция 2 имеет шарнирно соединенные с ней поворотные, геометрически изменяемые опоры 5 с башмаками 6. Металлоконструкция 2 имеет захваты 7 с приводами вертикального движения 8. Судно 1 выполнено в виде двухкорпусной подводной лодки. В качестве металлоконструкции 2 использован ее проницаемый корпус. Отсеки прочных понтонов 3, разделенные между собой переборками 9, соединены с помощью арматуры судна (на рисунке не показана) с его балластной системой (на рисунке не показана). В проницаемом корпусе 2 расположен по меньшей мере один грузовой отсек 10, а захваты 7 с приводами вертикального движения 8 размещены внутри грузового отсека 10 и установлены на домкратах 11. Опоры 5 оснащены приводами 12 поворота башмаков 6, преимущественно гидравлическими. Судно 1 снабжено механизмами 13 для спуска на грунт и возвращения на борт части его твердого балласта, которая для этого выполнена в виде цепей 14 шарнирно соединенных между собой грузов. Судно 1 имеет также подруливающие устройства 15.
Осуществление подъемно-транспортной операции с помощью подводного судна и его функционирование происходит следующим образом (Фиг.4-13).
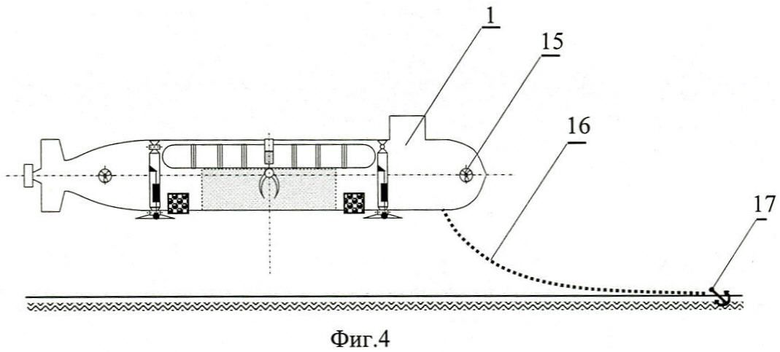
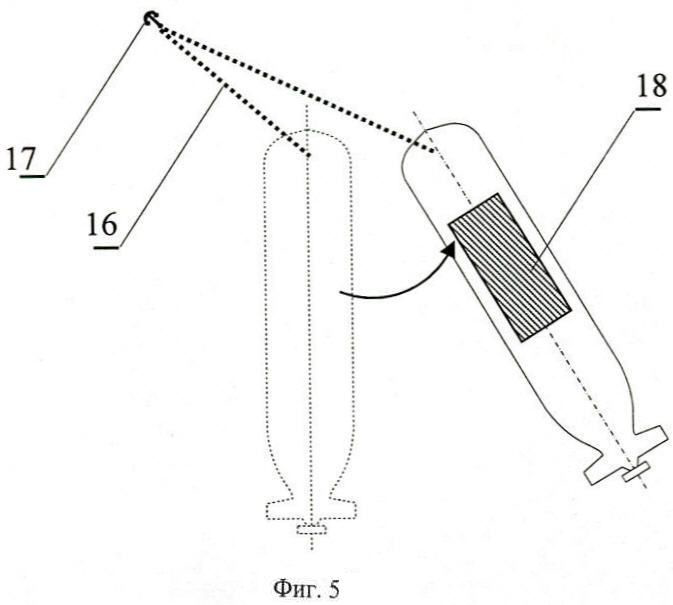
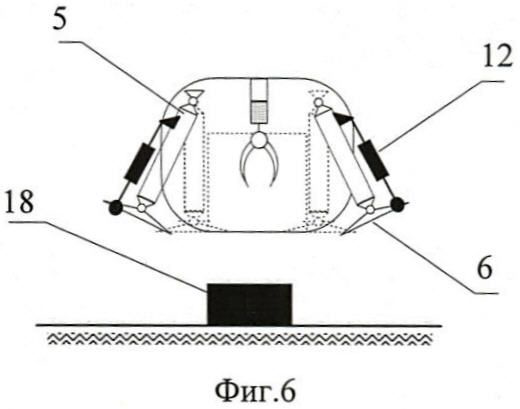
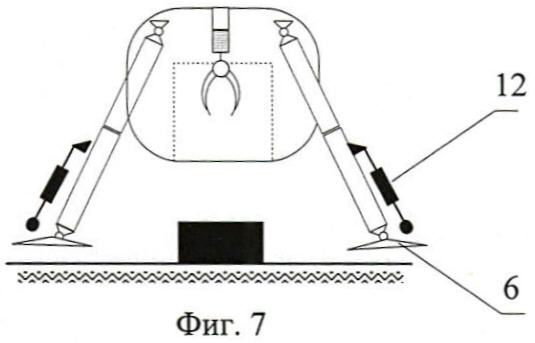
Подводное судно 1 на безопасной высоте над уровнем дна (как для подводной постановки на якорь) приближают к месту проведения операции (Фиг.4). С борта судна на цепи 16 опускают якорь 17. С помощью подруливающих устройств 15, регулируя длину якорных цепи 16, судно 1 занимает требуемое положение над объектом 18 (Фиг.5). Затем судно приводит опоры 5 в штатное положение для опирания на грунт (Фиг.6). С помощью приводов 12 поворачивают башмаки 6 в горизонтальное положение (Фиг.7).
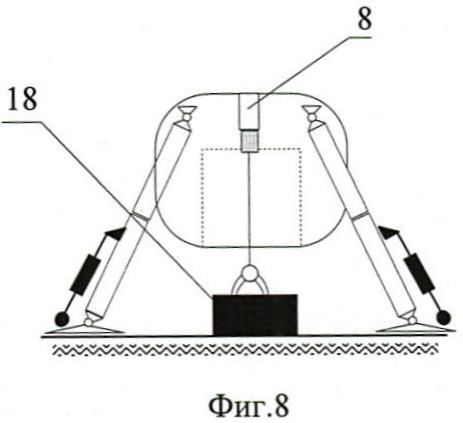
Далее, путем принятия балласта судно 1 приобретает отрицательную плавучесть, обеспечивающую необходимый для устойчивого положения на грунте подводный вес и встает на грунт на опоры 5 (Фиг.8). После этого с помощью приводов вертикального движения 8 опускают захваты 7, и с их помощью механически соединяют привод вертикального движения 8 с объектом 18. Затем переключают приводы вертикального движения 8 на подъем и доводят величину подъемного усилия до минимально необходимой величины, гарантирующей отсутствие зазоров и люфтов в механизме привода 8. После этого действие привода 8 останавливают.
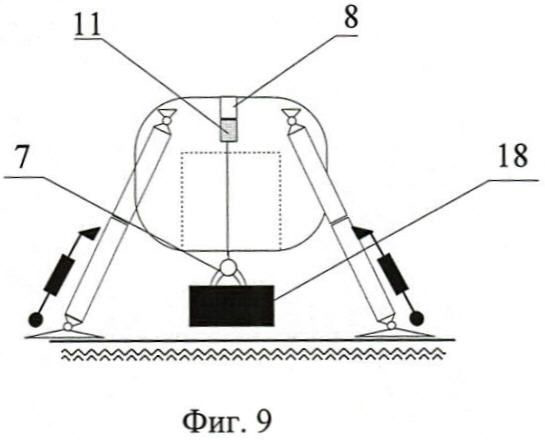
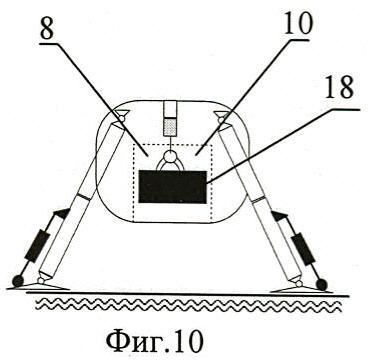
Затем (Фиг.3), с помощью балластной системы судна (на рисунке не показана) производят откачку воды из отсеков 4 прочных понтонов 3 судна 1. Откачку производят до момента, когда подъемная сила понтонов 3 достигнет величины, равной подводному весу объекта 18 (Фиг.8) за вычетом величины отрицательной плавучести, обеспечивающей устойчивое положение судна 1 с присоединенным к нему объектом 18 на грунте при действии опрокидывающего придонного течения. Далее (Фиг.9), с помощью домкратов 11 производят отрыв объекта 18 от грунта, прикладывая усилие через конструкции привода вертикального движения 8 и захваты 7. Далее (Фит.10), за счет работы приводов вертикального движения 8 объект 18 втягивают в проницаемый грузовой отсек 10 судна 1. Путем измерения усилий на домкратах 11 определяют положение центра тяжести объекта 18. В соответствии с полученными данными производится перераспределение балласта в отсеках 4 понтонов 3 (Фиг.3) с целью приведения к нулевым значениям кренящих и дифферентующих моментов, которые могут возникнуть после перехода судна с находящимся в его грузовом отсеке объектом во взвешенное состояние (при этом выравниваются нагрузки на опоры судна). После этого привод вертикального движения 8 стопорится, а усилия, приложенные к объекту 18 через захваты 7 и элементы привода 8, поддерживаются гидравлическими домкратами 11. Затем, производят раскрепление объекта 18 в грузовом отсеке 10 с помощью механизмов грузового отсека (на рисунке не показаны).
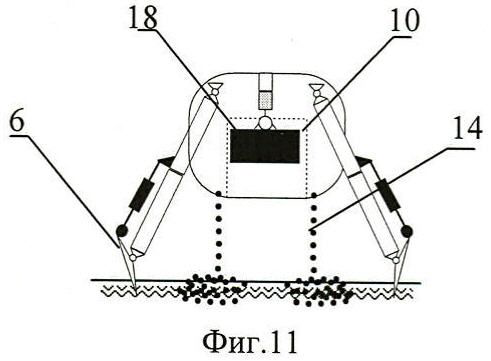
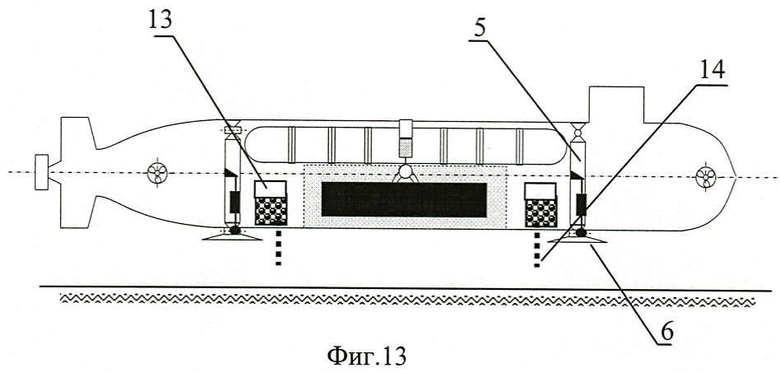
После приведения судна в состояние готовности к движению и включения подруливающих устройств 15 для компенсации сноса судна придонным течением одновременно (Фиг.11) производят максимально быстрый сброс части твердого балласта судна 1, которая для этого выполнена в виде цепи 14 шарнирно соединенных между собой грузов. Одновременно со сбросом цепей, с помощью приводов поворота 12 башмаков 6 производят синхронный поворот всех башмаков в положение, максимально близкое к вертикальному (Фиг.11). Общий вес цепного балласта выбирают так, чтобы после завершения поворота башмаков судно с находящимся в его грузовом отсеке объектом приобрело положительную плавучесть, достаточную для всплытия с вертикальной скоростью установившегося движения, близкой к скорости придонного течения. При этом после потери контакта с грунтом судно 1 с помощью подруливающих устройств 15 и якорной системы 16, 17 удерживается от сноса. Освобожденное от части твердого балласта судно под действием положительной плавучести всплывает на высоту, при которой висячая часть временно перемещенного на грунт цепного балласта 14 и якорной цепи 16 судна компенсирует его положительную плавучесть (Фиг.12 и 13).
Затем опоры 5 с башмаками 6 приводят в исходное положение. При этом с помощью механизмов 13, одновременно используя балластировку судна 1, возвращают на борт весь твердый балласт 14 (Фиг.13).
После этого судно в режиме подводной лодки снимается с подводной якорной стоянки и производит транспортировку объекта 18 к месту назначения.
Предлагаемые способ и подводное судно для его осуществления обеспечивают сохранение устойчивого равновесия системы «объект - подводное судно» как на стадии отрыва объекта от грунта, так и на стадии перехода системы из состояния покоя во взвешенное состояние в условиях действия придонного течения. Снижается зависимость подводных транспортных операций от условий природной среды, и, таким образом, создаются предпосылки для эффективного функционирования подводных технологий, включающих подводные подъемно-транспортные операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099237C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| СПОСОБ ПОДЪЕМА В УСЛОВИЯХ МОРСКОГО ВОЛНЕНИЯ ОБЪЕКТОВ, РАСПОЛОЖЕННЫХ НА ДНЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424152C1 |
| УСТРОЙСТВО ДЛЯ ОТРЫВА ОТ ГРУНТА, ФИКСАЦИИ НА НЕКОТОРОЙ ВЫСОТЕ И ТРАНСПОРТИРОВАНИЯ НА МЕЛКОВОДЬЕ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК, ВКЛЮЧАЯ ТИП АПЛ "КУРСК" | 2000 |
|
RU2231472C2 |
| СПОСОБ ПОДЪЁМА ПОДВОДНЫХ ЛОДОК | 2001 |
|
RU2228281C2 |
| МОРСКОЕ ГРУЗОВОЕ СУДНО ДЛЯ ПОДЪЕМА, ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ ЗАТОНУВШИХ ОБЪЕКТОВ В ПУНКТ ПРИЕМА | 2008 |
|
RU2377155C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 1990 |
|
RU2025403C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |

Изобретение относится к области судостроения и касается вопросов создания средств для осуществления подводных подъемно-транспортных операций, в том числе технологического назначения. Для осуществления подводной подъемно-транспортной операции на дно моря опускают подводное судно, имеющее жесткие опоры с башмаками. При установке судна на дно ему придают минимальную, но достаточную отрицательную плавучесть, обеспечивающую статическое равновесие судна на грунте при действии опрокидывающего придонного течения. Затем объект захватывают и с помощью механизмов судна выводят объект из контакта с грунтом. Перед выведением объекта из контакта с грунтом судну с присоединенным к нему объектом придают положительную плавучесть, которая меньше подводного веса объекта на величину указанной минимальной отрицательной плавучести. Непосредственно перед подъемом судна с объектом, после уравновешивания действующих на судно сил и моментов, увеличивают с максимально возможной быстротой плавучесть судна за счет сбрасывания на грунт части его твердого балласта и одновременного отрыва всех его опор от грунта путем изменения ориентации опорных поверхностей башмаков. В начальной стадии подъема судна твердый балласт полностью возвращают на борт, после чего судно с объектом движется в режиме подводной лодки. Подводное судно для осуществления предложенного способа выполнено в виде двухкорпусной подводной лодки, в проницаемом корпусе которой расположен грузовой отсек с захватами и приводами их вертикального движения. Опоры судна оснащены приводами поворота башмаков. Судно также снабжено механизмами для спуска на грунт и возвращения на борт части его твердого балласта, которая для этого выполнена в виде цепей шарнирно соединенных между собой грузов. Технический результат заключается в повышении надежности подъемно-транспортной операции, за счет обеспечения устойчивого положения системы «объект - подводное судно» в условиях действия придонного течения, что позволяет минимизировать зависимость параметров подъемно-транспортной операции от условий природной среды. 2 н.п. ф-лы, 13 ил.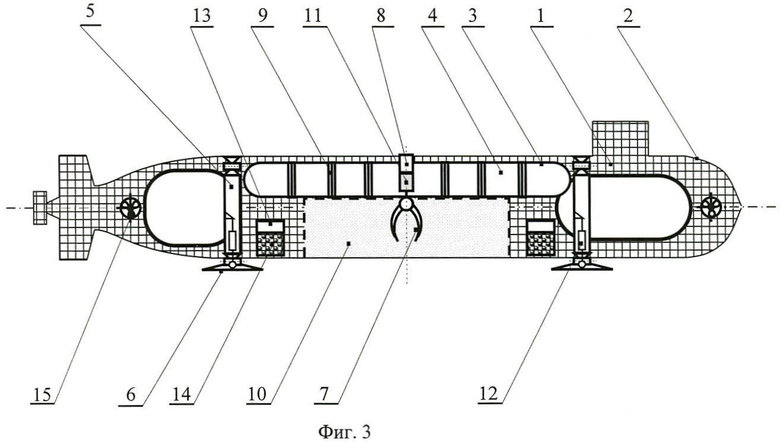
1. Способ осуществления подъемно-транспортной операции, заключающийся в том, что на дно моря опускают подводное судно, которое устанавливают над находящимся на дне объектом, применяя жесткие опоры с башмаками, после чего захватывают объект и, используя реакцию грунта на опорах, с помощью механизмов, имеющихся на борту судна, сначала выводят объект из контакта с грунтом и уравновешивают балластировкой судна силы и моменты, действующие на него после вывода объекта из контакта с грунтом, а затем осуществляют подъем и транспортировку объекта, отличающийся тем, что при установке судна на дно ему придают минимальную, но достаточную отрицательную плавучесть, обеспечивающую статическое равновесие судна на грунте при действии опрокидывающего придонного течения, а перед выведением объекта из контакта с грунтом судну придают положительную плавучесть, которая меньше подводного веса объекта на величину указанной минимальной, но достаточной величины, а непосредственно перед подъемом судна с объектом, после уравновешивания действующих на судно сил и моментов, увеличивают с максимально возможной быстротой плавучесть судна, для чего временно опускают на грунт часть твердого балласта судна, которая выполнена в виде цепи шарнирно соединенных между собой грузов, при этом одновременно и пропорционально весу опущенного на грунт твердого балласта уменьшают площадь контакта указанных башмаков с грунтом путем их синхронного отрыва от грунта, осуществляемого разворотом, преимущественно в вертикальное положение, контактирующих с грунтом поверхностей башмаков, используя усилия, создаваемые механизмами, имеющимися на судне, а после всплытия судна с объектом на высоту, при которой приобретенная положительная плавучесть уравновешивается весом участков указанной цепи, поднятых с грунта вместе с судном, оставшийся на грунте твердый балласт возвращают на борт, сохраняя достигнутую высоту подъема судна его балластировкой, после чего осуществляют движение судна с объектом в режиме подводной лодки.
2. Подводное судно для осуществления подъемно-транспортной операции, включающее металлоконструкцию с находящимся в ней прочным понтоном, выполненным в виде, по меньшей мере, одного изолированного отсека, имеющую шарнирно соединенные с ней поворотные геометрически изменяемые опоры с башмаками, и захваты с приводами вертикального движения, отличающееся тем, что судно выполнено в виде двухкорпусной подводной лодки, а в качестве упомянутой металлоконструкции использован ее проницаемый корпус, а отсеки упомянутых прочных понтонов соединены с помощью арматуры судна с его балластной системой, кроме того, в проницаемом корпусе расположен, по меньшей мере, один грузовой отсек, а упомянутые захваты с приводами вертикального движения размещены внутри грузового отсека и установлены на домкратах, при этом указанные опоры оснащены приводами поворота башмаков, преимущественно гидравлическими, кроме того, судно снабжено механизмами для спуска на грунт и возвращения на борт части его твердого балласта, которая для этого выполнена в виде цепей шарнирно соединенных между собой грузов, а также подруливающими устройствами.
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099237C1 |
| УСТРОЙСТВО для ПОДЪЕМА ГРУЗА С МОРСКОГО ДНА | 0 |
|
SU306046A1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| Устройство для подъема затонувших объектов | 1990 |
|
SU1804408A3 |
| US 3541986 A, 24.11.1970 | |||
| Способ определения расхода масла на угар в двигателе внутреннего сгорания | 1985 |
|
SU1691738A1 |

