Изобретение относится к области радиолокации и может быть использовано для измерения дальности импульсно-доплеровскими РЛС со средней частотой повторения импульсов (СЧП).
Средняя частота повторения импульсов характеризуется наличием неоднозначностей при измерении времени запаздывания (дальности) и доплеровского смещения несущей частоты (скорости) цели. Появление неоднозначностей обусловлено превышением времени запаздывания сигнала над периодом повторения импульсов, а доплеровского смещения над частотой повторения.
Известны способы [Справочник по радиолокации. М. Сколник, М.: Советское радио, 1979 г. т.3, с.378, 382] определения однозначных координат в режиме ВЧП для одиночной цели в луче РЛС. Эти же способы применимы для нескольких целей, если их скорости различаются, так как позволяют выделить сигналы, отраженные от определенной цели, при различных частотах повторения по признаку равенства доплеровской частоты сигнала при различных частотах повторения.
Наиболее близкими по технической сущности являются способы измерения дальности радиолокационными станциями со средней частотой повторения [Редди Н. С. , Свейми М.Н. Устранение неоднозначности по дальности и доплеровскому смещению частоты в РЛС со средней частотой повторения импульсов при наличии многочисленных целей, перевод Л-46681, Всесоюзный центр переводов, г. Москва, 1985 г. ] , основанные на изменении периода повторения импульсов, получении неоднозначных отсчетов времени запаздывания при различных значениях периода повторения и вычислении дальности до цели по неоднозначным данным.
Эти способы обладают тем недостатком, что при большой протяженности слепой зоны по дальности, ее переменном или разрывном характере затруднительно или невозможно заранее рассчитать набор частот повторения, обеспечивающий успешное измерение дальности.
Технический эффект предлагаемого изобретения состоит в создании такого способа измерения дальности до нескольких целей радиолокационной станцией (РЛС) со средней частотой повторения импульсов, при котором при заранее неизвестной протяженности слепой зоны по дальности измеряют дальность до нескольких целей.
Сущность заявляемого изобретения состоит в том, что предлагаемый способ измерения дальности до нескольких целей импульсно-доплеровскими РЛС со средней частотой повторения импульсов основан на излучении импульсов с линейной частотной модуляцией несущей частоты (ЛЧМ сигнала), обнаружении отраженных от целей сигналов многоканальным по времени запаздывания и доплеровской частоте приемным устройством с ЛЧМ гетеродином, измерении и запоминании неоднозначных времени запаздывания и доплеровской частоты в тех каналах, где цели были обнаружены. Эти операции повторяют при том же самом значении частоты повторения импульсов с линейной частотной модуляцией несущей частоты, сначала с одним знаком приращения крутизны излучаемого ЛЧМ сигнала, а затем с противоположным знаком приращения крутизны, причем величины приращений крутизны излучаемых ЛЧМ сигналов устанавливают такими, чтобы суммарное изменение доплеровской частоты принимаемого сигнала при повторных измерениях не превышало частоты повторения импульсов с линейной частотной модуляцией несущей частоты за вычетом протяженности слепой зоны по доплеровской частоте даже для цели, находящейся на максимальной дальности, на которую рассчитана данная радиолокационная станция, затем по величине приращения доплеровской частоты принятого сигнала ΔFki, происходящего из-за изменения крутизны принятого ЛЧМ сигнала, вычисляют однозначные, но грубые времена запаздывания по формуле
τкгр = ΔS1i•ΔFki,
где τкгр - грубое значение времени запаздывания сигнала от k-цели,
и по этим данным и неоднозначным запомненным значениям времени запаздывания вычисляют точную однозначную дальность каждой обнаруженной цели.
На фиг. 1 изображена блок-схема радиолокационной станции, реализующей предлагаемый способ.
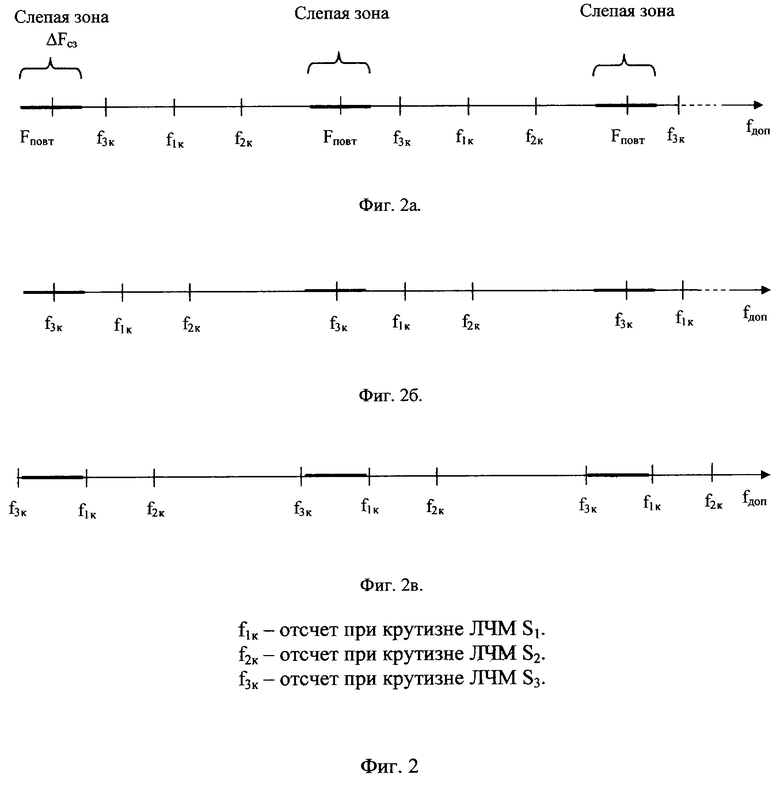
На фиг. 2 (а-в) изображены варианты расположения отсчетов от k-цели на оси доплеровских частот при различных скоростях цели.
Радиолокационная станция состоит из передатчика с ЛЧМ 1, антенны 2, многоканального приемника 3, синхронизатора 4, первого вычислителя 5, второго вычислителя 6, третьего вычислителя 7, ЛЧМ-гетеродина 8, смесителя 9.
Выход передатчика с ЛЧМ 1 подключен к входу антенны 2. Выход антенны 2 соединен с первым входом многоканального приемника 3, а его выход подключен к первому входу первого вычислителя 5. Первый выход синхронизатора 4 соединен с входом передатчика с ЛЧМ 1 и вторым входом многоканального приемника. Первый выход первого вычислителя 5 подключен к первому входу третьего вычислителя 7. Второй выход синхронизатора 4 подключен ко второму входу первого вычислителя 5, второму входу второго вычислителя 6 и второму входу третьего вычислителя 7. Второй выход первого вычислителя 5 соединен с первым входом второго вычислителя 6, выход второго вычислителя 6 подключен к третьему входу третьего вычислителя 7.
С передатчика с ЛЧМ 1 зондирующий сигнал со средней частотой повторения и линейной частотной модуляцией через антенну 2 излучается в пространство. Отраженный от цели сигнал принимается антенной 2 и поступает на многоканальный приемник 3, содержащий ЛЧМ-гетеродин 8 и смеситель 9. Крутизна линейно-частотной модуляции может принимать три значения Si[кГц/мс], где i= 1,2,3, одно из которых может быть равным нулю, чему соответствует отсутствие частотной модуляции. Синхронизатор 4 упорядочивает во времени работу отдельных устройств РЛС. Первый вычислитель 5 по амплитудам сигналов на выходах каналов многоканального приемника 3 рассчитывает неоднозначные параметры цели - дальность и скорость.
Второй вычислитель 6 по величине смещения сигнала на оси доплеровских частот при изменении крутизны ЛЧМ рассчитывает грубое, но однозначное значение времени запаздывания k-цели, а третий вычислитель 7, используя результаты вычислителей 5 и 6, устраняют первоначальную неоднозначность и рассчитывает дальность до цели.
Работа РЛС, реализующей предлагаемый способ, происходит следующим образом. Поиск цели, обнаружение и измерение неоднозначных параметров, времени запаздывания и доплеровской частоты, производятся при значении крутизны ЛЧМ S1, являющимся средним между S2 и S3. Последующие измерения происходят при том же значении периода повторения импульсов, но при других значениях крутизны ЛЧМ, причем приращения крутизны имеют различные знаки, то есть:
ΔS12=S1-S2>0; ΔS13=S1-S3<0
или
ΔS12=S1-S2<0; ΔS13=S1-S3>0.
При изменении крутизны ЛЧМ обнаружение и измерение происходят в тех же каналах дальности (времени запаздывания), так как период повторения не изменился; принятый сигнал после гетеродинирования лишается ЛЧМ модуляции, но приобретает смещение по частоте Доплера, пропорциональное времени запаздывания сигнала и приращению крутизны ЛЧМ. Из-за различных знаков приращения крутизны смещение на оси частот происходит в противоположных направлениях относительно первоначального измерения, при этом из-за ограничений на величину |ΔS12|+|ΔS13| суммарное смещение не превышает Fповт-ΔFс3, Fповт - частота повторения импульсов, а ΔFс3 - протяженность слепой зоны по доплеровской частоте.
Возможные варианты расположения отсчетов от k-цели на оси доплеровских частот при различных скоростях цели приведены на фиг.2 а, б, в.
В любом случае, хотя бы при одном из повторных измерений, сигнал оказывается в зоне прозрачности по доплеровской частоте, что дает возможность измерить однозначное время запаздывания сигнала от цели. При средней частоте повторения импульсов, которая находится обычно в пределах Fповт=10-20 кГц, точность измерения достаточна для устранения неоднозначности.
Предлагаемый способ является многоцелевым. Измерение дальности происходит при данном способе без изменения периода повторения, поэтому при наличии нескольких целей не происходит перепутывания отсчетов от различных целей, и разрешенные по времени запаздывания сигналы от разных целей обрабатываются раздельно. Неразрешенные сигналы, времена запаздывания от которых отличаются на целое число периодов повторения, будут разрешены по доплеровской частоте при изменение крутизны ЛЧМ. Цели, сигналы от которых оказались в слепой зоне по времени запаздывания при данной частоте повторения, будут обнаружены в процессе поиска при других частотах повторения, и будет измерено время запаздывания до этих целей, а следовательно, и дальность до них. При измерении дальности данным способом не играет роли величина слепой зоны по дальности, важно лишь, чтобы сигнал оказался в зоне прозрачности хотя бы на одной частоте повторения.
Рассмотрим пример, близкий к практике. Пусть РЛС имеет следующие параметры:
максимальная дальность действия РЛС-Дмакс=100 км;
протяженность слепой зоны по доплеровской частоте ΔFс3=3 кГц;
приращение крутизны ЛЧМ ΔS12=6 кгц/мс, ΔS13=-6 кГц/мс;
погрешность измерения частоты Доплера ±150 Гц;
обнаружение цели произошло при значении частоты повторения Fповт=12 кГц.
Смещение на оси доплеровских частот сигнала от цели, находящейся на предельной дальности Дмакс=100 км при изменении крутизны ЛЧМ на 6 кГц, составит
ΔFki[кГц]=ΔS12[кГц/мс] τц[мс] = 6[кГц/мс]. 0,666[мс]=4 кГц,
так как время запаздывания сигнала от цели τц на дальности 100 км равно 
Суммарное смещение сигнала при включении ЛЧМ с крутизнами ΔS12=6 кГц/мс, ΔS13=-6 кГц/мс составляет 4 кГц+4 кГц=8 кГц, что не превышает значения частоты повторения за вычетом слепой зоны по скорости Fповт- ΔFc3= 12 кГц - 3 кГц= 9 кГц > 8 кГц, то есть условие нахождения хотя бы одного из двух отсчетов при повторных измерениях в зоне прозрачности по доплеровской частоте оказывается выполненным. Нетрудно подсчитать, что максимальной ошибке измерения доплеровского смещения Δfдоп= 150 Гц = 0,15 кГц соответствует ошибка измерения времени запаздывания (однозначной дальности)
или в единицах дальности .
.
Частоте повторения 12 кГц соответствует период повторения в единицах дальности Д[км] = 12,5 км.
Неоднозначность первоначального измерения полностью устраняется, если ошибка измерения однозначной дальности способом ЛЧИ не превышает половины периода, что выполняется с запасом .
.
Таким образом, предлагаемый способ позволяет измерять дальность до нескольких целей радиолокационной станцией со средней частотой повторения импульсов при заранее неизвестной протяженности слепой зоны по дальности.
Изобретение относится к области радиолокации. Технический результат предлагаемого изобретения заключается в создании способа измерения дальности до нескольких целей радиолокационной станцией (РЛС) со средней частотой повторения импульсов, при котором при заранее неизвестной протяженности слепой зоны по дальности измеряют дальность до нескольких целей. Заявленный способ измерения дальности основан на излучении импульсов с линейной частотой модуляцией несущей частоты (ЛЧМ сигнала), приеме этого сигнала, обнаружении отраженных от целей сигналов многоканальным по времени запаздывания и доплеровской частоте приемным устройством с ЛЧМ гетеродином, измерении и запоминании неоднозначных времени запаздывания и доплеровской частоты в тех каналах, где цели были обнаружены, повторении этих операций при том же самом значении частоты повторения импульсов с линейной частотной модуляцией несущей частоты, сначала с одним знаком приращения крутизны излучаемого ЛЧМ сигнала, а затем с противоположным знаком приращения крутизны излучаемого ЛЧМ сигнала, причем величины приращений крутизны излучаемых ЛЧМ сигналов устанавливают такими, чтобы суммарное изменение доплеровской частоты принимаемого сигнала при повторных измерениях не превышало частоты повторения импульсов с линейной частотной модуляцией несущей частоты за вычетом протяженности слепой зоны, по доплеровской частоте даже для цели, находящейся на максимальной дальности, на которую рассчитана данная радиолокационная станция, затем по величине приращения доплеровской частоты принятого сигнала, происходящего из-за изменения крутизны принятого ЛЧМ сигнала, вычисляют однозначные, но грубые дальности по определенной формуле, затем на основании имеющихся данных вычисляют точную однозначную дальность каждой обнаруженной цели. 2 ил.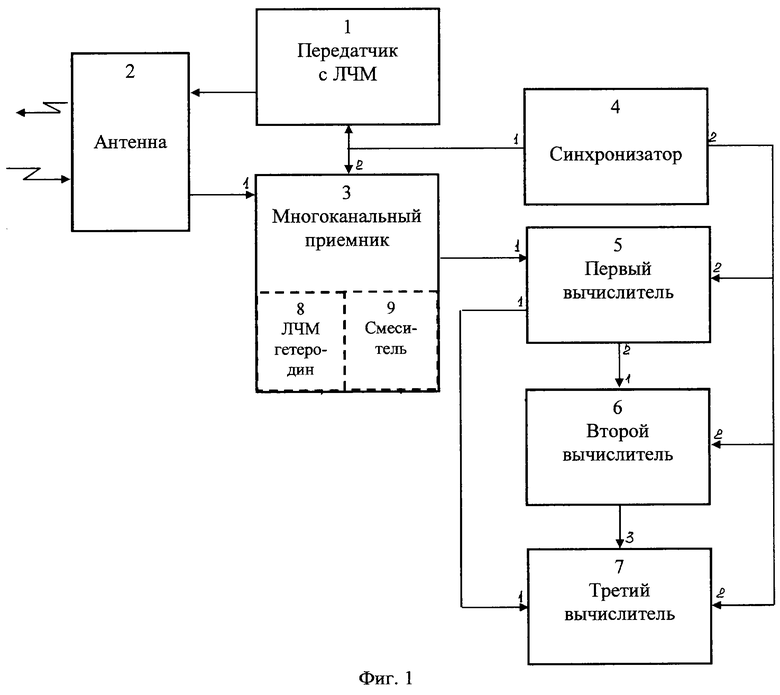
Способ измерения дальности до нескольких целей импульсно-доплеровскими радиолокационными станциями со средней частотой повторения импульсов, основанный на излучении импульсов с линейной частотной модуляцией несущей частоты (ЛЧМ сигнала), приеме этого сигнала, обнаружении отраженных от целей сигналов многоканальным по времени запаздывания и доплеровской частоте приемным устройством с ЛЧМ гетеродином, измерении и запоминании неоднозначных времени запаздывания и доплеровской частоты в тех каналах, где цели были обнаружены, отличающийся тем, что повторяют эти операции при том же самом значении частоты повторения импульсов с линейной частотной модуляцией несущей частоты, сначала с одним знаком приращения крутизны излучаемого ЛЧМ сигнала, а затем с противоположным знаком приращения крутизны излучаемого ЛЧМ сигнала, причем величины приращений крутизны излучаемых ЛЧМ сигналов устанавливают такими, чтобы суммарное изменение доплеровской частоты принимаемого сигнала при повторных измерениях не превышало частоты повторения импульсов с линейной частотной модуляцией несущей частоты за вычетом протяженности слепой зоны по доплеровской частоте даже для цели, находящейся на максимальной дальности, на которую рассчитана данная радиолокационная станция, затем по величине приращения доплеровской частоты принятого сигнала, происходящего из-за изменения крутизны принятого ЛЧМ сигнала, вычисляют однозначные, но грубые дальности по формуле
τкгр=ΔS1i · ΔFki,
где τкгр - грубое значение времени запаздывания сигнала от k - цели;
ΔS1i - приращение крутизны ЛЧМ сигнала;
ΔFki - соответствующие приращения доплеровской частоты сигнала от k-й цели,
и по этим данным и неоднозначным запомненным значениям времени запаздывания вычисляют точную однозначную дальность каждой обнаруженной цели.
| РЕДДИ Н.С., СВЕЙМИ М.Н | |||
| Устранение неоднозначности по дальности и доплеровскому смещению частоты в РЛС со средней частотой повторения импульсов при наличии многочисленных целей | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ТИГЕЛЬНОЙ ПЛАВКИ МЕТАЛЛОВ | 1935 |
|
SU46681A1 |
| - М.: Всесоюзный центр переводов | |||
| RU 98104808 А, 27.01.2000 | |||
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |
| US 4713664 А, 15.12.1987 | |||
| СПОСОБ ОПТИМАЛЬНОГО ДОСТУПА К АБДОМИНАЛЬНОМУ ОТДЕЛУ ПИЩЕВОДА ИММУНОДЕФИЦИТНЫХ МЫШЕЙ ПРИ ОРТОТОПИЧЕСКОЙ ТРАНСПЛАНТАЦИИ ФРАГМЕНТА ОПУХОЛИ ПИЩЕВОДА ЧЕЛОВЕКА | 2018 |
|
RU2709835C1 |

