Изобретение относится к радиолокации и может использоваться в радиотехнических системах с непрерывным излучением для определения дальности и радиальной скорости высокоскоростных целей со сниженной радиолокационной заметностью.
Известен способ (аналог) определения параметров траектории движения воздушных целей в обзорных радиолокационных станциях (РЛС) [патент RU №2337378, МПК G01S 13/42, опубликовано 27.10.2008], заключающийся в формировании N матриц опорных сигналов, умножении каждого элемента n-й матрицы на принимаемый в процессе обзора комплексный эхо-сигнал, формировании матрицы результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n, вычислении квадрата модуля каждого элемента матрицы результирующего сигнала, определении номера строки и столбца матрицы, при которых достигается максимум результирующего сигнала, расчете радиальной и тангенциальной скорости цели.
Известно устройство (аналог) [патент RU №2337378, МПК G01S 13/42, опубликовано 27.10.2008], содержащее первый и второй фазовый детектор, фазовращатель, первый и второй аналого-цифровой преобразователь, вычислители модуля и аргумента комплексного числа, умножитель модуля комплексного числа на его аргумент, умножитель комплексных чисел, формирователь матриц опорных сигналов, сумматор комплексных чисел, устройство вычисления квадрата модуля комплексного числа, устройство поиска номеров строк и столбцов матрицы, первый и второй умножитель скалярных чисел, вычислитель корня квадратного из суммы квадратов, вычислитель арктангенса частного двух скалярных чисел.
Недостаток способа и устройства заключается в том, что при высокой скорости движения цели, когда пройденное расстояние за время наблюдения превышает разрешающую способность РЛС по дальности, точность вычисления параметров траектории цели существенно ухудшается вследствие миграции отметки цели по каналам дальности.
Наиболее близким способом является частотный способ определения дальности и радиальной скорости цели (прототип) [Ширман Я.Д. Теоретические основы радиолокации. М.: «Сов. радио», 1970. С. 369-370], основанный на последовательном зондировании цели сигналом с нарастающей и убывающей линейной частотной модуляцией (ЛЧМ), приеме отраженного от цели сигнала, его демодуляции, определении частот демодулированных сигналов на нарастающем и убывающем участках ЛЧМ сигнала с последующим расчетом по разности частот демодулированных сигналов дальности и радиальной скорости движущейся цели.
Наиболее близким является устройство определения высоты и скорости летательного аппарата с симметричным пилообразным законом изменения частоты излучаемых колебаний (прототип), содержащее последовательно соединенные частотный модулятор, передатчик, передающую антенну, последовательно соединенные приемную антенну, умножитель, усилитель низкой частоты, схему суммы и разности частот, вычислитель высоты и скорости летательного аппарата, при этом второй выход передатчика соединен со вторым входом умножителя, а второй выход частотного модулятора через синхронизатор соединен со вторым входом схемы суммы и разности частот [Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные доплеровские устройства и системы навигации летательных аппаратов. М.: «Сов. радио», 1975, 432 с. С. 141-143].
Недостатком способа и устройства прототипа является малая дальность обнаружения и низкая точность определения дальности и радиальной скорости высокоскоростных движущихся целей со сниженной радиолокационной заметностью, обусловленные расширением отметок от целей и малой энергией принимаемых сигналов [Ширман Я.Д. Теоретические основы радиолокации. М.: «Сов. радио», 1970. С. 235].
Технический результат данного изобретения состоит в увеличении дальности обнаружения и повышении точности определения дальности и радиальной скорости высокоскоростных целей со сниженной радиолокационной заметностью.
Технический результат достигается тем, что в известном способе, заключающемся в зондировании цели ЛЧМ сигналом, приеме отраженного сигнала, его демодуляции, определении параметров движения цели, дополнительно после демодуляции запоминают демодулированный сигнал биений в течение периода модуляции зондирующего сигнала, определяют скорость изменения частоты его ЛЧМ и с ее помощью рассчитывают радиальную скорость цели, формируют опорный сигнал, демодулируют запомненный сигнал и по его частоте определяют дальность до цели.
Технический результат достигается тем, что в известном устройстве, содержащем последовательно соединенные частотный модулятор, генератор высокой частоты, передающую антенну, а также последовательно соединенные приемную антенну, первый умножитель сигналов, усилитель низкой частоты, при этом второй выход генератора высокой частоты соединен со вторым входом первого умножителя сигналов, дополнительно введены последовательно соединенные измеритель скорости изменения частоты ЛЧМ сигнала, вычислитель радиальной скорости, формирователь опорного сигнала, второй умножитель сигналов, частотный анализатор и вычислитель дальности, а также запоминающее устройство и устройство синхронизации, при этом вторые входы формирователя опорного сигнала и запоминающего устройства и вход частотного модулятора объединены и соединены с выходом устройства синхронизации, а вход измерителя скорости изменения частоты ЛЧМ сигнала и первый вход запоминающего устройства объединены и соединены с выходом усилителя низкой частоты, кроме того, выход запоминающего устройства соединен со вторым входом второго умножителя сигналов.
Сущность способа состоит в следующем. Как известно [Ширман Я.Д. Теоретические основы радиолокации. М.: «Сов. радио», 1970. С. 324], повышение дальности обнаружения цели со сниженной радиолокационной заметностью и точности измерения ее координат достигается за счет увеличения энергии принятого сигнала, которая, в свою очередь, обеспечивается увеличением периода модуляции зондирующего сигнала. В то же время движение цели приводит к появлению в демодулированном (информационном) сигнале биений дополнительной ЛЧМ, девиация которой пропорциональна скорости цели и периоду модуляции зондирующего сигнала. При этом положение отметки от цели является функциональной зависимостью двух компонент: дальностной fR и доплеровской fд частот [Ширман Я.Д. Теоретические основы радиолокации. М.: «Сов. радио», 1970. С. 370], а ширина отметки определяется девиацией дополнительной ЛЧМ. Увеличение периода модуляции зондирующего сигнала приводит к увеличению девиации дополнительной ЛЧМ и расширению отметки от цели, что снижает точность определения ее дальности и радиальной скорости. Компенсацию дополнительной ЛЧМ, а также доплеровской частоты fд осуществляют путем умножения демодулированного сигнала биений на опорный сигнал. Для этого по предварительно измеренной скорости изменения частоты дополнительной ЛЧМ μ демодулированного сигнала биений (равной отношению девиации дополнительной ЛЧМ к периоду модуляции зондирующего сигнала) вычисляют величину радиальной скорости цели Vц и на ее основе определяют доплеровскую частоту fд в соответствии с выражением fд=2Vцf0/c, где f0 - начальная частота зондирующего сигнала; с - скорость света. По найденным значениям fд и μ формируют опорный сигнал, представляющий собой ЛЧМ сигнал с начальной частотой, равной доплеровской частоте fд, и скоростью изменения частоты, равной μ. После чего осуществляют перемножение сформированного опорного сигнала на предварительно запомненный демодулированный сигнал биений. В результате получают гармонический сигнал с компенсированной доплеровской частотой и дополнительной ЛЧМ. При этом частота fR полученного сигнала пропорциональна дальности до цели. Компенсация дополнительной ЛЧМ в сигнале приводит к тому, что ширина отметки цели уменьшается, а ее амплитуда увеличивается.
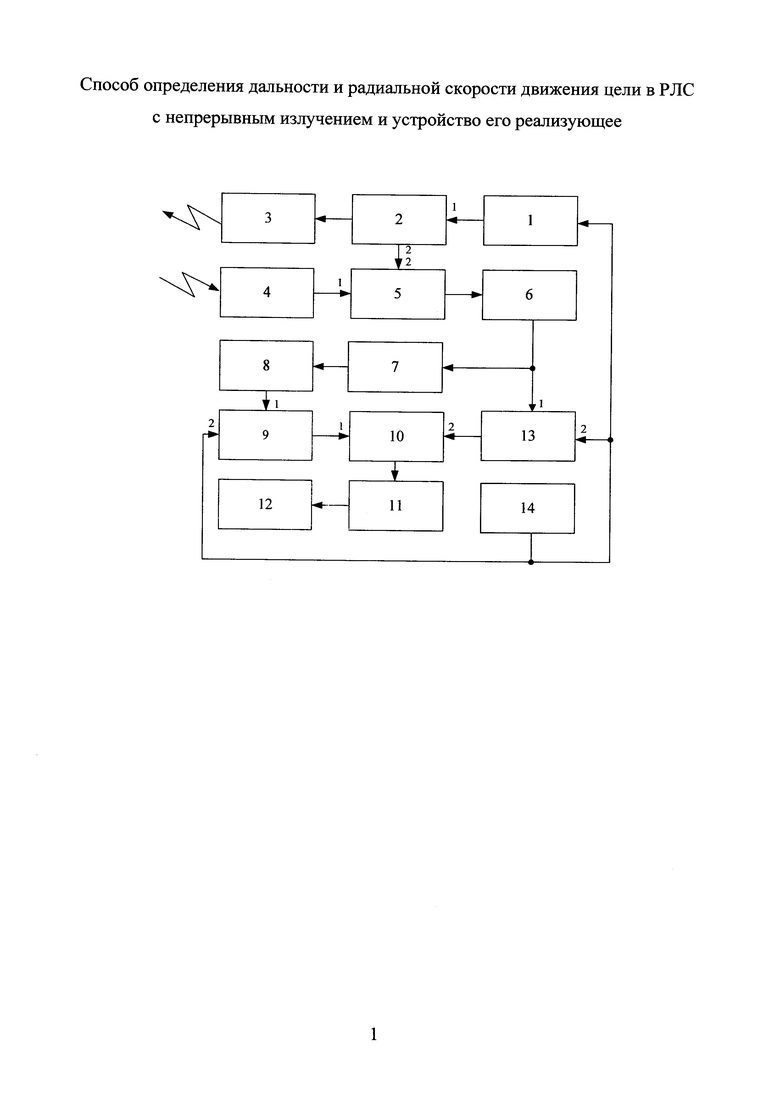
На чертеже представлена структурная схема устройства для осуществления способа определения дальности и радиальной скорости движения цели в РЛС с непрерывным излучением.
Устройство состоит из частотного модулятора 1, генератора высокой частоты 2, передающей антенны 3, приемной антенны 4, первого умножителя сигналов 5, усилителя низкой частоты 6, измерителя скорости изменения частоты ЛЧМ сигнала 7, вычислителя радиальной скорости 8, формирователя опорного сигнала 9, второго умножителя сигналов 10, частотного анализатора 11, вычислителя дальности 12, запоминающего устройства 13 и устройства синхронизации 14. Согласно структурной схеме, изображенной на чертеже, устройство, реализующее предложенный способ, содержит последовательно соединенные частотный модулятор 1, генератор высокой частоты 2, передающую антенну 3, а также последовательно соединенные приемную антенну 4, первый умножитель сигналов 5, усилитель низкой частоты 6. При этом второй выход генератора высокой частоты 2 соединен со вторым входом первого умножителя сигналов 5, а вход усилителя низкой частоты 6 последовательно соединен с измерителем скорости изменения частоты ЛЧМ сигнала 7, вычислителем радиальной скорости 8, формирователем опорного сигнала 9, вторым умножителем сигналов 10, частотным анализатором 11, вычислителем дальности 12. Кроме того, вторые входы формирователя опорного сигнала 9 и запоминающего устройства 13 и вход частотного модулятора 1 объединены и соединены с выходом устройства синхронизации 14, а вход измерителя скорости изменения частоты ЛЧМ сигнала 7 и первый вход запоминающего устройства 13 объединены и соединены с выходом усилителя низкой частоты 6, кроме того, выход запоминающего устройства 13 соединен со вторым входом второго умножителя сигналов 10.
Измеритель скорости изменения частоты ЛЧМ сигнала 7 предназначен для измерения скорости изменения частоты поступающего на его вход сигнала и может быть реализован, например, на основе измерителя скорости линейного изменения частоты внутри импульса [патент RU №2010243, МПК G01R 23/00, опубликовано 30.03.1994].
Вычислитель радиальной скорости 8 по значению скорости изменения частоты сигнала, поступающего на его вход, осуществляет вычисление радиальной скорости цели Vц и доплеровской частоты fд по формулам:  и fд=2Vцf0/c, где Δf и Т - ширина спектра и период модуляции зондирующего сигнала соответственно.
и fд=2Vцf0/c, где Δf и Т - ширина спектра и период модуляции зондирующего сигнала соответственно.
Вычислитель дальности 12 по значению частоты сигнала, поступающего на его вход, осуществляет вычисление дальности цели по формуле  .
.
Устройство синхронизации 14 предназначено для временной синхронизации работы частотного модулятора 1, формирователя опорного сигнала 9 и запоминающего устройства 13.
Вычислитель радиальной скорости 8, вычислитель дальности 12 и устройство синхронизации 14 могут быть выполнены, например, на микропроцессорах типа [http://www.atmel.com/ru/ru/devices/ATMEGA32.aspx].
Формирователь опорного сигнала 9 предназначен для формирования ЛЧМ сигнала, начальная частота и скорость изменения частоты которого определяются значениями, поступающими на его вход. Может быть выполнен на цифровых синтезаторах частот типа [http://www.analog.com/ru/products/rf-microwave/direct-digital-synthesis.html].
Второй умножитель сигналов 10 предназначен для умножения двух поступающих на него колебаний и может быть реализован, например, на аналоговых умножителях сигналов [Шило В.Л. Линейные интегральные схемы в радиоэлектронной аппаратуре. М.: «Советское радио», 1974, 312 с. С. 162].
Частотный анализатор 11 предназначен для определения частоты поступающего на него сигнала и может быть выполнен на элементах, чувствительных к частоте колебаний, например счетчике числа «нулей», автокорреляторе или частотном дискриминаторе [Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные доплеровские устройства и системы навигации летательных аппаратов. М.: «Сов. радио», 1975, 432 с. С. 225-228].
Запоминающее устройство 13 предназначено для запоминания демодулированного сигнала биений на время, равное длительности периода модуляции зондирующего сигнала, с последующим воспроизведением этого сигнала и может быть выполнено на устройствах типа [Шустов М.А. Схемотехника. 500 устройств на аналоговых микросхемах. СПб.: Наука и техника, 2013, 352 с. С. 123].
Работа устройства, реализующего способ, не отличается от работы прототипа, за исключением следующего. Устройство синхронизации 14 осуществляет синхронизацию работы частотного модулятора 1, формирователя опорного сигнала 9 и запоминающего устройства 13. В начале каждого периода модуляции зондирующего сигнала устройство синхронизации 14 осуществляет запуск частотного модулятора и выдает сигнал начала записи в запоминающее устройство 13, а по окончании каждого периода модуляции - осуществляет одновременный запуск формирователя опорного сигнала 9 и воспроизведения запомненного в запоминающем устройстве 13 демодулированного сигнала биений. Демодулированный сигнал биений с выхода усилителя низкой частоты 6 в течение каждого периода модуляции зондирующего сигнала запоминают с помощью запоминающего устройства 13, с помощью измерителя скорости изменения частоты ЛЧМ сигнала 7 измеряют его среднюю скорость изменения частоты дополнительной ЛЧМ μ, на основе которой с помощью вычислителя радиальной скорости 8 рассчитывают радиальную скорость цели и доплеровскую частоту, значения которых поступают на первый вход формирователя опорного сигнала 9. Формирователь опорного сигнала 9 по окончании каждого периода модуляции зондирующего сигнала формирует опорный сигнал в соответствии с выражением
 ,
,
где j - мнимая единица; π=3,14…,
который поступает на первый вход второго умножителя сигналов 10. При этом одновременно с опорным сигналом на второй вход второго умножителя сигналов 10 с выхода запоминающего устройства 13 выдается предварительно запомненный демодулированный сигнал биений. В результате на выходе второго умножителя 10 получают гармоническое колебание с компенсированной доплеровской частотой и дополнительной ЛЧМ, значение частоты fR которого определяют с помощью частотного анализатора 11. На основе вычисленного значения fR в вычислителе дальности 12 рассчитывают дальность до цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2699240C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, РАДИАЛЬНОЙ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2022 |
|
RU2799812C1 |
| Способ радиолокационного моноимпульсного измерения дальности и радиальной скорости целей при зондировании сигналом с линейной частотной модуляцией | 2022 |
|
RU2796220C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ В РЛС С ЗОНДИРУЮЩИМ СОСТАВНЫМ ПСЕВДОСЛУЧАЙНЫМ ЛЧМ ИМПУЛЬСОМ | 2014 |
|
RU2553272C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1993 |
|
RU2054693C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
Изобретение относится к радиолокации и может использоваться в радиотехнических системах с непрерывным излучением для определения дальности и радиальной скорости высокоскоростных целей со сниженной радиолокационной заметностью. Достигаемый технический результат - увеличение дальности обнаружения и повышение точности определения дальности и радиальной скорости высокоскоростных целей со сниженной радиолокационной заметностью. Сущность способа заключается в приеме отраженного сигнала, его демодуляции, запоминании демодулированного сигнала биений в течение периода модуляции зондирующего сигнала, определении скорости изменения частоты его линейной частотной модуляции (ЛЧМ) и расчете с ее помощью радиальной скорости цели с последующим формированием опорного сигнала, демодуляцией запомненного сигнала и определением по его частоте дальности до цели. Устройство для реализации способа содержит частотный модулятор, генератор высокой частоты, передающую антенну, а также приемную антенну, первый умножитель сигналов, усилитель низкой частоты, измеритель скорости изменения частоты ЛЧМ сигнала, вычислитель радиальной скорости, формирователь опорного сигнала, второй умножитель сигналов, частотный анализатор и вычислитель дальности, а также запоминающее устройство и устройство синхронизации. Перечисленные средства определенным образом соединены между собой. 2 н.п. ф-лы, 1 ил.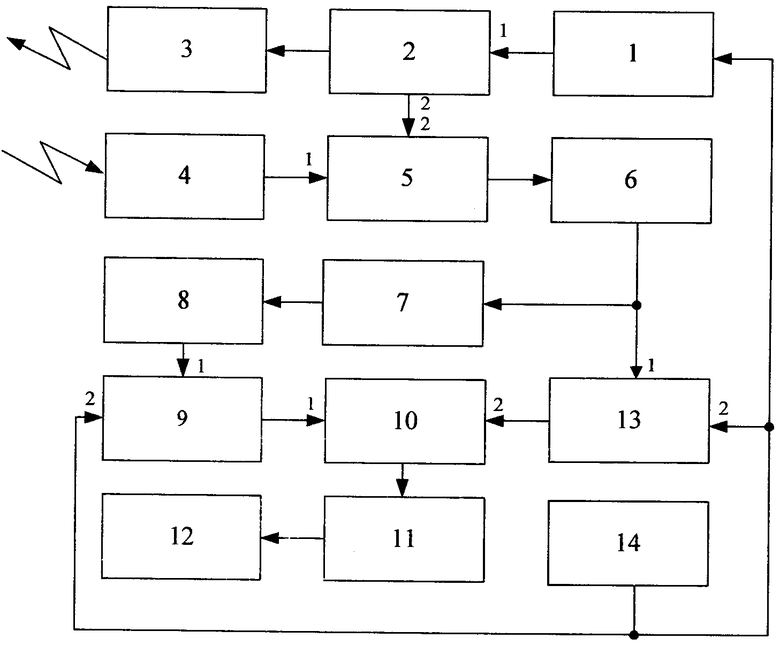
1. Способ определения дальности и радиальной скорости цели в радиолокационной станции (РЛС) с непрерывным излучением, заключающийся в зондировании цели сигналом с линейной частотной модуляцией (ЛЧМ), приеме отраженного сигнала, демодуляции принятого сигнала, определении параметров движения цели, отличающийся тем, что после демодуляции дополнительно запоминают демодулированный сигнал биений в течение периода модуляции зондирующего сигнала, определяют скорость изменения частоты μ ЛЧМ сигнала и рассчитывают радиальную скорость цели по формуле Vц=cμT/4Δf, где с - скорость света, Т - период модуляции зондирующего сигнала, Δf - ширина спектра зондирующего сигнала, затем формируют опорный сигнал, представляющий собой ЛЧМ сигнал, начальная частота и скорость изменения частоты которого определяется значением частоты модуляции зондирующего сигнала и значением радиальной скорости цели, перемножают опорный сигнал с запомненным демодулированным сигналом, получают сигнал с компенсированной доплеровской частотой и дополнительной ЛЧМ, значение частоты fR которого используют для вычисления дальности до цели по формуле Rц=cfRT/2Δf.
2. Устройство определения дальности и радиальной скорости цели в РЛС с непрерывным излучением, содержащее последовательно соединенные частотный модулятор, генератор высокой частоты, передающую антенну, а также последовательно соединенные приемную антенну, первый умножитель сигналов, усилитель низкой частоты, при этом второй выход генератора высокой частоты соединен со вторым входом первого умножителя сигналов, отличающееся тем, что в него дополнительно введены последовательно соединенные измеритель скорости изменения частоты ЛЧМ сигнала, вычислитель радиальной скорости, формирователь опорного сигнала, второй умножитель сигналов, частотный анализатор и вычислитель дальности, а также запоминающее устройство и устройство синхронизации, при этом вторые входы формирователя опорного сигнала и запоминающего устройства и вход частотного модулятора объединены и соединены с выходом устройства синхронизации, а вход измерителя скорости изменения частоты ЛЧМ сигнала и первый вход запоминающего устройства объединены и соединены с выходом усилителя низкой частоты, кроме того, выход запоминающего устройства соединен со вторым входом второго умножителя сигналов.
| Ширман Я.Д | |||
| Теоретические основы радиолокации | |||
| М., Советское радио, 1970, с.369-370 | |||
| КОЛЧИНСКИЙ В.Е | |||
| и др | |||
| Автономные доплеровские устройства и системы навигации летательных аппаратов | |||
| М., Советское радио, 1975, с.141-143 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ЛОКАЦИИ | 1999 |
|
RU2163723C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| US 5455588 A, 03.10.1995 | |||
| WO 2002035252 A2, 02.05.2002 | |||
| JP 4771357 B2, 14.09.2011. | |||

