Изобретение относится к области физиологии труда и может применяться в системе психофизиологической подготовки операторов эргатических систем.
Из уровня техники известны способ дифференциальной диагностики гипокинезии пациентов с синдромом паркинсонизма и система для реализации такого способа (патент на изобретение RU №2770980), согласно которым пациент выполняет комплекс тестовых движений, направленных на оценку гипокинезии, а в качестве количественной оценки тестовых движений, данные о которых получаются с помощью устройства для получения данных об изменении положения измеряемой части тела, берется произведение пороговой амплитуды на количество движений с амплитудой, большей пороговой, причем пороговая амплитуда выбирается так, чтобы обеспечить максимальное значение оценки. Недостатком этого технического решения является недостаточная физиологическая адекватность применительно к применению в системе психофизиологической подготовки операторов эргатических систем за счет ориентированности на специфику пациентов с синдромом паркинсонизма, а не на «профессиональную гипокинезию», присущую практически здоровым операторам эргатических систем.
Технической задачей изобретения является расширение арсенала способов распознавания функциональных состояний человека-оператора эргатической системы.
Решение технической задачи достигается тем, что способ распознавания функционального состояния «Гипокинезия» состоит в том, что на голени и запястья человека-оператора надевают браслеты, в которые встроены инерциальные датчики с беспроводным интерфейсом, и до и после выполнения профессиональной деятельности у оператора, принявшего исходное положение «стойка с правильной осанкой, пятки вместе, носки врозь, руки опущены вдоль туловища, пальцы полусогнуты» фиксируют: угол между положением левой кисти в позиции «руки опущены вниз» и «руки вытянуты вперед» u1до и u1после; угол между положением правой кисти в позиции «руки опущены вниз» и «руки вытянуты вперед» u2до и u2после; угол между положением левой кисти в позиции «руки опущены вниз» и «руки в положении максимально назад» u3до и u3после; угол между положением правой кисти в позиции «руки опущены вниз» и «руки в положении максимально назад» u4до и u4после; угол между положением левой кисти в позиции «руки опущены вниз» и «руки вытянуты в стороны» u5до и u5после; угол между положением правой кисти в позиции «руки опущены вниз» и «руки вытянуты в стороны» u6до и u6после; угол между положением левой ноги в позиции «стойка» и «максимально назад» u7до и u7после; угол между положением правой ноги в позиции «стойка» и «максимально назад» u8до и u8после; угол между положением левой ноги в позиции «стойка» и «максимально вперед и вверх» u9до и u9после; угол между положением правой ноги в позиции «стойка» и «максимально вперед и вверх» u10до и u10после; угол между положением левой ноги в позиции «стойка» и «максимально влево» u11до и u11после; угол между положением правой ноги в позиции «стойка» и «максимально вправо» u12до и u12после - после чего вычисляют величину U=u1до-u1после+u2до-u2после+u3до-u3после+u4до-u4после+u5до-u5после+u6до-u6после+u7до-u7после+u8до-u8после+u9до-u9после+u10до-u10после+u11до-u11после+u12до-u12после, и если величина U отрицательная, то у человека-оператора фиксируют функциональное состояние «Гипокинезия».
Технический результат, достигаемый заявленной совокупностью признаков, заключается в обеспечении возможности распознавания функционального состояния «Гипокинезия» у человека-оператора эргатической системы.
Реализация заявленного способа заключается в том, что:
1) на голени и запястья человека-оператора надевают браслеты, в которые встроены инерциальные датчики с беспроводным интерфейсом - при этом не должно быть помех выполнению задач деятельности;
2) до и после выполнения профессиональной деятельности у оператора, принявшего исходное положение «стойка с правильной осанкой, пятки вместе, носки врозь, руки опущены вдоль туловища, пальцы полусогнуты» фиксируют:
угол между положением левой кисти в позиции «руки опущены вниз» и «руки вытянуты вперед» - u1до и u1после;
угол между положением правой кисти в позиции «руки опущены вниз» и «руки вытянуты вперед» - u2до и u2после;
угол между положением левой кисти в позиции «руки опущены вниз» и «руки в положении максимально назад» - u3до и u3после;
угол между положением правой кисти в позиции «руки опущены вниз» и «руки в положении максимально назад» - u4до и u4после;
угол между положением левой кисти в позиции «руки опущены вниз» и «руки вытянуты в стороны» - u5до и u5после;
угол между положением правой кисти в позиции «руки опущены вниз» и «руки вытянуты в стороны» - u6до и u6после;
угол между положением левой ноги в позиции «стойка» и «максимально назад» - u7до и u7после - позиция «стойка» соответствует исходному положению «стойка с правильной осанкой, пятки вместе, носки врозь, руки опущены вдоль туловища, пальцы полусогнуты»;
угол между положением правой ноги в позиции «стойка» и «максимально назад» - u8до и u8после;
угол между положением левой ноги в позиции «стойка» и «максимально вперед и вверх» - u9до и u9после;
угол между положением правой ноги в позиции «стойка» и «максимально вперед и вверх» - u10до и u10после;
угол между положением левой ноги в позиции «стойка» и «максимально влево» - u11до и u11после;
угол между положением правой ноги в позиции «стойка» и «максимально вправо» - u12до и u12после.
3) После этого вычисляют величину, характеризующую изменение суммарной угловой амплитуды движений конечностей оператора до и после деятельности:
U=u1до-u1после+u2до-u2после+u3до-u3после+u4до-u4после+u5до-u5после+u6до-u6после+u7до-u7после+u8до-u8после+u9до-u9после+u10до-u10после+u11до-u11после+u12до-u12после,
и если величина U отрицательная (суммарная угловая амплитуда до деятельности больше, чем после деятельности), то у человека-оператора фиксируют функциональное состояние «Гипокинезия».
Вследствие того, что для реализации способа используются показатели, полученные до и после профессиональной деятельности, выбор конкретного инерциального датчика принципиального значения не имеет.
Верификация способа произведена при проведении тренажерной подготовки 7 операторов эргатических систем. Результаты интерпретировались группой из четырех врачей функциональной диагностики и признаны адекватными.
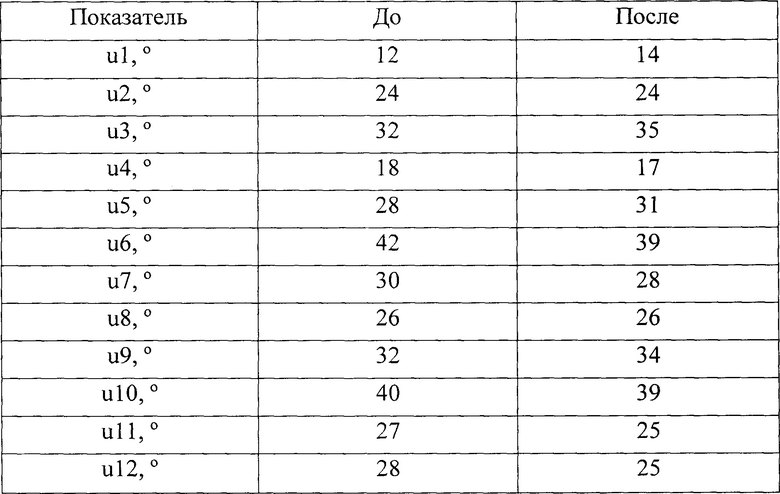
Величина U=-8, суммарная угловая амплитуда до деятельности больше, чем после деятельности, поэтому у оператора фиксируется функциональное состояние «Гипокинезия», величина U может свидетельствовать о выраженности этого состояния.
Испытуемый 2
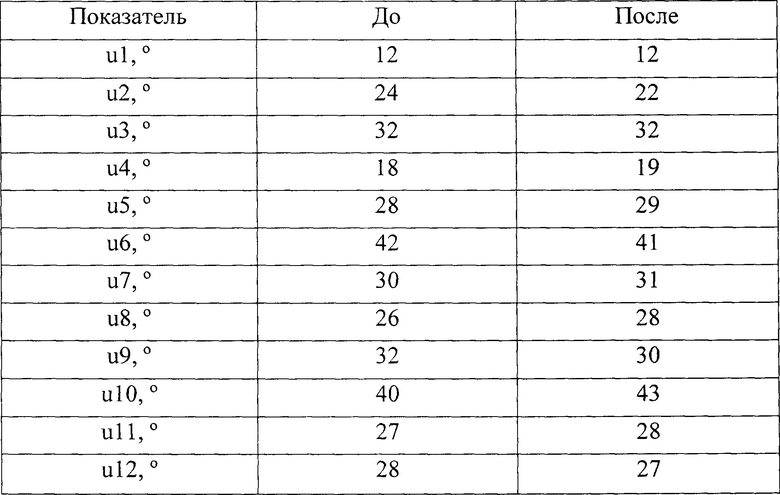
Величина U=3, суммарная угловая амплитуда до деятельности меньше, чем после деятельности, поэтому функциональное состояние «Гипокинезия» у оператора не фиксируется.
Работа выполнена при поддержке гранта Президента Российской Федерации по государственной поддержке ведущих научных школ Российской Федерации (НШ-122.2022.1.6).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫРАЖЕННОСТИ ГИПОКИНЕЗИИ У БЫВШИХ СПОРТСМЕНОВ | 2024 |
|
RU2835326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ГИПОКИНЕЗИИ ПРИ ВЫНУЖДЕННОМ ОГРАНИЧЕНИИ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ У ПАЦИЕНТОВ С ТРАВМОЙ | 2024 |
|
RU2839235C1 |
| СПОСОБ ОЗДОРОВЛЕНИЯ ЧЕЛОВЕКА | 2010 |
|
RU2452453C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ И ПОДДЕРЖАНИЯ ИНДИВИДУАЛЬНОГО СУТОЧНОГО БИОЛОГИЧЕСКОГО РИТМА У ПОДРОСТКОВ | 2011 |
|
RU2474408C1 |
| СПОСОБ ПРОФИЛАКТИКИ ОСТРЫХ РЕСПИРАТОРНЫХ ЗАБОЛЕВАНИЙ У ДЕТЕЙ РАННЕГО ВОЗРАСТА | 2013 |
|
RU2523350C1 |
| СПОСОБ АДАПТАЦИИ ОРГАНИЗМА УЧАЩИХСЯ К ВЫСОКИМ ПСИХОЭМОЦИОНАЛЬНЫМ И ФИЗИЧЕСКИМ НАГРУЗКАМ (МЕТОД ЛИЛИИ СЕМАШКО) | 2007 |
|
RU2361566C2 |
| СПОСОБ ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ ОРГАНОВ ДЫХАНИЯ У ДЕТЕЙ ДОШКОЛЬНОГО ВОЗРАСТА | 2005 |
|
RU2285516C1 |
| Способ восстановления психоэмоционального состояния профессиональных танцоров и спортсменов | 2021 |
|
RU2823509C2 |
| СПОСОБ ПОВЫШЕНИЯ РАБОТОСПОСОБНОСТИ ЧЕЛОВЕКА | 2017 |
|
RU2675579C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ОРГАНИЗМ | 1997 |
|
RU2110978C1 |
Изобретение относится к медицине и может быть использовано в области физиологии труда. На голени и запястья человека-оператора надевают браслеты, в которые встроены инерциальные датчики с беспроводным интерфейсом. До и после выполнения профессиональной деятельности у оператора, принявшего исходное положение «стойка с правильной осанкой, пятки вместе, носки врозь, руки опущены вдоль туловища, пальцы полусогнуты» фиксируют положение частей тела. После производят рассчет исходя из величины углов, под которыми расположены части тела. Способ обеспечивает возможность распознавания функционального состояния гипокинезия. 2 пр.
Способ распознавания функционального состояния «Гипокинезия», состоящий в том, что на голени и запястья человека-оператора надевают браслеты, в которые встроены инерциальные датчики с беспроводным интерфейсом, и до и после выполнения профессиональной деятельности у оператора, принявшего исходное положение «стойка с правильной осанкой, пятки вместе, носки врозь, руки опущены вдоль туловища, пальцы полусогнуты» фиксируют:
угол между положением левой кисти в позиции «руки опущены вниз» и «руки вытянуты вперед» - u1до и u1после;
угол между положением правой кисти в позиции «руки опущены вниз» и «руки вытянуты вперед» - u2до и u2после;
угол между положением левой кисти в позиции «руки опущены вниз» и «руки в положении максимально назад» - u3до и u3после;
угол между положением правой кисти в позиции «руки опущены вниз» и «руки в положении максимально назад» - u4до и u4после;
угол между положением левой кисти в позиции «руки опущены вниз» и «руки вытянуты в стороны» - u5до и u5после;
угол между положением правой кисти в позиции «руки опущены вниз» и «руки вытянуты в стороны» - u6до и u6после;
угол между положением левой ноги в позиции «стойка» и «максимально назад» - u7до и u7после;
угол между положением правой ноги в позиции «стойка» и «максимально назад» - u8до и u8после;
угол между положением левой ноги в позиции «стойка» и «максимально вперед и вверх» - u9до и u9после;
угол между положением правой ноги в позиции «стойка» и «максимально вперед и вверх» - u10до и u10после;
угол между положением левой ноги в позиции «стойка» и «максимально влево» - u11до и u11после;
угол между положением правой ноги в позиции «стойка» и «максимально вправо» - u12до и u12после,
после чего вычисляют величину
U=u1до-u1после+u2до-u2после+u3до-u3после+u4до-u4после+u5до-u5после+u6до-u6после+u7до-u7после+u8до-u8после+u9до-u9после+u10до-u10после+u11до-u11после+u12до-u12после, и если величина U отрицательная, то у человека-оператора фиксируют функциональное состояние «Гипокинезия».

