Изобретение относится к области приборостроения - микромеханическим гироскопам и акселерометрам авиационно-космических пилотажных систем управления [1, 2].
Известны способы и устройства для измерения угловых скоростей и линейных ускорений, в которых для компенсации внешних вибрационных воздействий в виде помех, искажающих выходной аналоговый сигнал, используются аналоговые или цифровые фильтры [3, 4].
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ уменьшения погрешности измерений инерциальными датчиками при вибрационных воздействиях путем фильтрации выходного аналогового сигнала, включающий прием первичного сигнала в цифровом виде, формирование масштабного коэффициента на заданный максимальный уровень выходного аналогового сигнала цифро-аналогового преобразователя, преобразование цифровой информации в аналоговый сигнал по патенту RU 2598145 С1 [5] с последующей его фильтрацией по [6].
Реализация такого способа уменьшения погрешности измерений инерциальными датчиками достигается устройством, содержащим микромеханический датчик первичной информации, выдающий сигнал в цифровом виде, микроконтроллер, цифро-аналоговый преобразователь [5] и аналоговый фильтр [6].
Основной недостаток такого способа и устройства заключается в том, что в результате формирования масштабного коэффициента на заданный максимальный уровень выходного сигнала цифро-аналогового преобразователя положительная полуволна амплитуды напряжения от вибрационных помех «срезается» на его выходе из-за того, что превышает допустимый для цифро-аналогового преобразователя уровень выходного сигнала, а отрицательная полуволна пропускается.
В результате, после фильтрации среднее значение выходного аналогового сигнала Ucp уменьшается по сравнению с заданным номинальным Uн, что приводит к ошибке измерений ΔU=Uн-Ucp. При разложении в ряд отрицательной полуволны и учете только первого коэффициента ряда ее отрицательная постоянная составляющая, соответствующая ошибке измерения, будет равна (-ΔU)=(-Uв/π) [7]. А погрешность измерения номинальной угловой скорости в относительных единицах может быть рассчитана по формуле:  Где: ωв - амплитуда вибрационных помех; ωн - номинальная измеряемая угловая скорость; kн - номинальный масштабный коэффициент; Uн - номинальное напряжение, соответствующее номинальной угловой скорости; Uв - амплитуда напряжения, обусловленная вибрационной помехой.
Где: ωв - амплитуда вибрационных помех; ωн - номинальная измеряемая угловая скорость; kн - номинальный масштабный коэффициент; Uн - номинальное напряжение, соответствующее номинальной угловой скорости; Uв - амплитуда напряжения, обусловленная вибрационной помехой.
Техническим результатом заявленного изобретения является уменьшение погрешности измерений, вызванных фильтрацией помех от внешних вибрационных воздействий при ограниченном верхнем уровне выходного сигнала цифро-аналогового преобразователя.
Заявленный технический результат достигается способом измерения угловой скорости летательного аппарата, включающим прием первичного сигнала в цифровом виде, формирование масштабного коэффициента на заданный максимальный уровень выходного аналогового сигнала цифро-аналогового преобразователя, уменьшение сформированного масштабного коэффициента на величину, пропорциональную амплитуде вибрационного воздействия, преобразование цифровой информации в аналоговый сигнал, усиление преобразованного в аналоговый вид сигнала на величину, пропорциональную уменьшению масштабного коэффициента, и последующую его фильтрацию.
Также заявленный технический результат достигается устройством для измерения угловой скорости летательного аппарата, содержащим микромеханический датчик первичной информации, выдающий сигнал в цифровом виде, микроконтроллер, цифро-аналоговый преобразователь, усилитель аналогового сигнала и аналоговый фильтр, при этом выход датчика первичной информации соединен со входом микроконтроллера, выход микроконтроллера соединен со входом цифро-аналогового преобразователя, выход цифро-аналогового преобразователя соединен со входом усилителя аналогового сигнала, а выход усилителя аналогового сигнала соединен со входом аналогового фильтра.
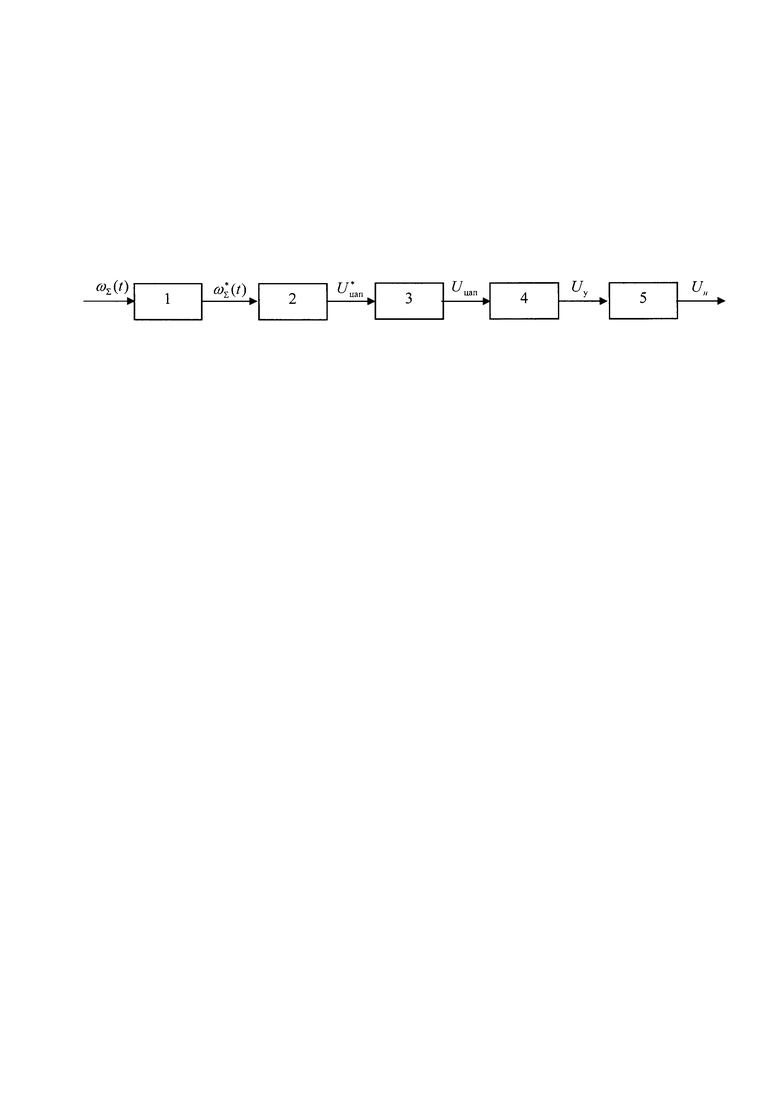
Сущность изобретения поясняется чертежом, на котором приведена структурно-функциональная блок-схема реализующего предложенный способ устройства,
где:
1 - микромеханический датчик первичной информации;
2 - микроконтроллер;
3 - цифро-аналоговый преобразователь;
4 - усилитель аналогового сигнала;
5 - аналоговый фильтр;
ω∑(t)=ωн+Δωв(t) - измеряемая угловая скорость, где: ωн - номинальная угловая скорость летательного аппарата, Δωв(t) - переменная составляющая от вибрационных воздействий;
 - первичная информация от микромеханического гироскопа в цифровом виде;
- первичная информация от микромеханического гироскопа в цифровом виде;
 - максимальное напряжение в цифровом виде, передаваемое из микроконтроллера в цифро-аналоговый преобразователь;
- максимальное напряжение в цифровом виде, передаваемое из микроконтроллера в цифро-аналоговый преобразователь;
Uцап - максимальное напряжение в аналоговом виде, передаваемое из ЦАП в усилитель 4; Uy - выходной аналоговый сигнал после усиления;
Uн - номинальное выходное напряжение в аналоговом виде после фильтрации.
В соответствии с чертежом устройство, реализующее предложенный способ, представляет собой инерциальный датчик (например, микромеханический гироскоп), который содержит микромеханический датчик первичной информации 1 (микромеханический гироскоп), выдающий сигнал в цифровом виде, микроконтроллер 2, цифро-аналоговый преобразователь 3, аналоговый фильтр 5, а также дополнительно введенный усилитель аналогового сигнала 4. При этом выход датчика 1 соединен со входом микроконтроллера 2, который выходом соединен со входом цифро-аналогового преобразователя 3. При этом выход последнего соединен со входом усилителя аналогового сигнала 4, который своим выходом соединен со входом аналогового фильтра 4.
Заявленный способ и устройство работают следующим образом.
При вращении летательного аппарата с номинальной угловой скоростью ωн первичная информация о ее величине  вместе с помехой от вибрационных воздействий
вместе с помехой от вибрационных воздействий  выдается чувствительным микромеханическим датчиком 1 в микроконтроллер 2 в цифровом виде -
выдается чувствительным микромеханическим датчиком 1 в микроконтроллер 2 в цифровом виде -  , Где:
, Где:  амплитуда вибрационных помех; ƒв - частота вибрационных помех. Максимальная амплитуда суммарной угловой скорости будет равна:
амплитуда вибрационных помех; ƒв - частота вибрационных помех. Максимальная амплитуда суммарной угловой скорости будет равна:  В микроконтроллере 2 номинальный масштабный коэффициент kн=Uн/ωн, устанавливающий связь между измеряемой номинальной угловой скоростью ωн и соответствующей ей величиной номинального напряжения Uн уменьшается на величину
В микроконтроллере 2 номинальный масштабный коэффициент kн=Uн/ωн, устанавливающий связь между измеряемой номинальной угловой скоростью ωн и соответствующей ей величиной номинального напряжения Uн уменьшается на величину  пропорциональную амплитуде вибрационного воздействия. Тогда уменьшенный масштабный коэффициент будет равен -
пропорциональную амплитуде вибрационного воздействия. Тогда уменьшенный масштабный коэффициент будет равен -  Значение максимального напряжения ЦАП, равное номинальному напряжению
Значение максимального напряжения ЦАП, равное номинальному напряжению  в цифровом виде передается в цифро-аналоговый преобразователь 3.
в цифровом виде передается в цифро-аналоговый преобразователь 3.
Такое преобразование масштабного коэффициента необходимо для того, чтобы напряжение на выходе цифро-аналогового преобразователя, величина которого для обеспечения максимального масштабного коэффициента выбирается равной выходному номинальному напряжению Uцап=Uн, могло обеспечить измерение угловой скорости, превышающей номинальную на величину амплитуды помех  от вибрационных воздействий -
от вибрационных воздействий -  Где:
Где:  - значение номинального напряжения в цифровом виде;
- значение номинального напряжения в цифровом виде;  - напряжение от вибрационных помех в цифровом виде.
- напряжение от вибрационных помех в цифровом виде.
В цифро-аналоговом преобразователе напряжение из цифрового вида  преобразуется в аналоговый
преобразуется в аналоговый  и передается в усилитель аналогового сигнала 4, где оно увеличивается с помощью коэффициента ky, равного коэффициенту kо:Uy=Uцапky=(Uн+ΔUв)ky/kо=Uн+ΔUв.
и передается в усилитель аналогового сигнала 4, где оно увеличивается с помощью коэффициента ky, равного коэффициенту kо:Uy=Uцапky=(Uн+ΔUв)ky/kо=Uн+ΔUв.
Напряжение из аналогового усилителя передается в аналоговый фильтр 5. И поскольку переменная составляющая от вибрационных помех ΔUв имеет знакопеременное значение, то в процессе фильтрации среднее значение напряжения, соответствующее номинальной угловой скорости, передается без потери точности Uср=Uн и, следовательно, ΔU=Ucp-Uн=0.
Таким образом, применение заявленного изобретения позволяет измерять угловую скорость, превышающую номинальную на величину помех, обусловленных вибрационными воздействиями, и при осуществлении фильтрации вибрационных помех обеспечивать повышение точности измерений.
Источники информации:
1. Гироскопические системы, ч. II. Гироскопические приборы и системы. Под ред. Д.С. Пельпора. Учебное пособие для вузов по специальности «Гироскопические приборы и устройства». М., «Высшая школа», 1971, с. 488.
2. Кузнецов А.Г., Галкин В.И., Молчанов А.В., Портнов Б.И., Якубович A.M. Результаты разработки и летных испытаний микромеханического блока // Сб. трудов XIX Санкт-Петербургской международной конференции по интегрированным навигационным системам, 2012, с. 16-26.
3. Хоровиц П., Хилл У. Искусство схемотехники, Из-во «Бином», 2014, с. 704.
4. Мизин И.А., Матвеев А.А. Цифровые фильтры. М., «Связь», 1979, с. 240.
5. Патент на изобретение РФ №2598145 «Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов», МПК G05D 1/00, опубл. 20.09.2016 г.
6. Микромеханический гироскоп LY510ALH, www.st.com.
7. Г. Корн, Т. Корн. Справочник по математике (для научных работников и инженеров), Из-во «Наука», М., 1978 г., с. 831.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2018 |
|
RU2686441C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОЙ ИНФОРМАЦИИ В БЛОКЕ ГИРОСКОПОВ И ТРЕХОСНЫЙ БЛОК ДЕМПФИРУЮЩИХ ГИРОСКОПОВ | 2015 |
|
RU2598145C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2289100C1 |
| Микромеханический гироскоп | 2019 |
|
RU2714870C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕКРЕСТНЫХ ЖЕСТКОСТИ И ДЕМПФИРОВАНИЯ ПОДВЕСА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП, В КОТОРОМ РЕАЛИЗОВАН ДАННЫЙ СПОСОБ | 2007 |
|
RU2346239C1 |
Группа изобретений относится к способу и устройству для измерения угловой скорости летательного аппарата. Для измерения угловой скорости летательного аппарата принимают первичный сигнал в цифровом виде, формируют масштабный коэффициент на заданный максимальный уровень выходного аналогового сигнала цифро-аналогового преобразователя, уменьшают его на величину, пропорциональную амплитуде вибрационного воздействия, преобразуют в аналоговый сигнал, усиливают его определенным образом и производят фильтрацию. Устройство содержит микромеханический датчик первичной информации, микроконтроллер, цифро-аналоговый преобразователь, усилитель аналогового сигнала и аналоговый фильтр. Обеспечивается уменьшение погрешности измерений инерциальными датчиками при вибрационных воздействиях. 2 н.п. ф-лы, 1 ил.
1. Способ измерения угловой скорости летательного аппарата, характеризующийся тем, что включает прием первичного сигнала в цифровом виде, формирование масштабного коэффициента на заданный максимальный уровень выходного аналогового сигнала цифро-аналогового преобразователя, уменьшение сформированного масштабного коэффициента на величину, пропорциональную амплитуде вибрационного воздействия, преобразование цифровой информации в аналоговый сигнал, усиление преобразованного в аналоговый вид сигнала на величину, пропорциональную уменьшению масштабного коэффициента, и последующую его фильтрацию.
2. Устройство для измерения угловой скорости летательного аппарата, характеризующееся тем, что содержит микромеханический датчик первичной информации, выдающий сигнал в цифровом виде, микроконтроллер, цифро-аналоговый преобразователь, усилитель аналогового сигнала и аналоговый фильтр, при этом выход датчика первичной информации соединен с входом микроконтроллера, выход микроконтроллера соединен с входом цифро-аналогового преобразователя, выход цифро-аналогового преобразователя соединен с входом усилителя аналогового сигнала, а выход усилителя аналогового сигнала соединен с входом аналогового фильтра.
| 0 |
|
SU154196A1 | |
| Колосоподъемник | 1932 |
|
SU38976A1 |
| Способ установки стеновых панелей | 1959 |
|
SU131489A1 |
| 0 |
|
SU162343A1 |

