Изобретение относится к области машиностроения, в частности к устройствам для определения проходимости строительной техники в условиях пересеченной местности.
Из уровня техники известно устройство для замера величин буксования и глубины колеи, содержащее диски-измерители фактически пройденного пути, расположенные соосно по окружности ведущего и копирующего колес и выполненные в виде ферромагнитных пластин, укрепленных на дисках через равные между собой расстояния. Ферромагнитные пластины связаны с электромагнитным датчиком, фиксирующим пройденный путь колесами, записываемый на ленте осциллографа. Для записи изменения глубины колеи, образованной ведущим колесом, предусмотрен установочный штырь, закрепленный на кронштейне устройства по нормали к оси ведущего колеса и связанный с реохордным датчиком, фиксирующим образуемую глубину колеи и записываемую на фотоленте осциллографа, (см. Описание изобретения к авторскому свидетельству СССР SU 542096 А1 «Устройство для замера величин буксования и глубины колеи», МПК G01D 21/02; УДК 531.717.3(088.8). Заявлено: 17.02.1975, 2105253/10. Опубликовано: 05.01.77 г. Бюл. №1. Авторы: Акчурин А.Г., Бекенов М.Б., Оспанкулов А.Ж. Заявитель: Казахский научно-исследовательский институт механизации и электрификации сельского хозяйства. Открытое издание).
Данное устройство позволяет снизить трудоемкость и повысить точность измерения величин буксования, а также измерение потерь мощности на буксование. Однако устройство по своей конструкции является достаточно сложным и малонадежным.
Кроме того, известно устройство для измерения глубины колеи, содержащее датчик глубины колеи, выполненный в виде двух тяг с лыжами, который посредством прижимного устройства, состоящего из двух торсионов и кронштейна, крепится к оси заднего моста машины. Датчик кинематически связан с потенциометрическим преобразователем, содержащим два потенциометра, расположенных в герметизированных кожухах и включенных по мостовой схеме. В качестве регистрирующих приборов использованы стрелочный индикатор и самопишущий прибор, например, ампервольтметр. Для обеспечения автоматической записи глубины колеи в масштабе пути привод лентопротяжного механизма самописца осуществлен от гибкого валика спидометра машины.
При движении машины по мягким грунтам одна из лыж скользит по межколейному промежутку, а другая - по дну колеи, при этом их взаимное превышение определяет величину измеряемого параметра. По глубине колеи оценивают проходимость исследуемого участка местности, (см. Описание изобретения к авторскому свидетельству СССР SU 178505 А1 «Устройство для измерения глубины колеи в процессе движения базовой машины», МПК G01C 7/04; УДК 528.543(088.8). Заявлено: 20.11.1964, 929803/26-10. Опубликовано: 22.01.66 г. Бюл. №3. Авторы: Черняев Г.Я., Воложинский Н.С., Васьков А.И., Миусов В.В., Спасибухов Ю.И., Рыжов А.А. Открытое издание).
Известное устройство позволяет в процессе движения машины с определенной долей вероятности определить возможности грунта для его последующего преодоления техникой. Однако устройство не позволяет с достаточной точностью, быстродействием и информативностью, в том числе без остановки машины, оценить характеристики грунта для его последующего преодоления специальными колесными шасси, в том числе кранами, бетономешалками и другой высокой по массе строительной техникой.
Данное устройство по технической сущности является наиболее близким к заявленному техническому решению и выбрано в качестве прототипа.
Задача настоящей полезной модели заключается в обеспечении автоматизации процесса измерения глубины колеи, повышение точности измерения при упрощении конструкции устройства, повышение его быстродействия, информативности и надежности, при безостановочном режиме измерения глубины колеи, значительное сокращение времени, требуемом на преодоление участков дорог по пересеченной местности строительной техникой.
Техническим результатом предложенного изобретения является повышение информативности и точности измерения, повышение надежности конструкции устройства при обеспечении автоматизация процесса определения глубины колеи пересеченной местности для ее последующего преодоления строительной техникой, значительное снижение времени на преодоление препятствий.
Техническим решением предложенного изобретения является использование в составе устройства трех тяг, каждая из которых имеет с одной стороны опорный каток, а с другой стороны, скрепленные с энкодерами, расположенными на балке, скрепленной креплением с осью заднего моста машины, а также модуля интерфейса и интерфейса (ПЭВМ) соединенных посредством электропроводов.
При этом сущность устройства автоматического определения глубины дорожной колеи для оценки проходимости строительной техники заключается в том, что машина, производящая оценку проходимости пересеченной местности для строительной техники снабжена устройством, закрепленным через крепление с осью ее заднего моста. Устройство содержит три тяги с опорными катками, каждый из которых, под своим весом опирается на поверхность грунта. При движении машина тянет за собой тяги, при этом средняя тяга своим опорным катком обкатывает межколейный промежуток, а другие два - по дну правой и левой колеи. В связи с их взаимным превышением, энкодеры определяют величину измеряемого параметра, и в виде сигналов передают экипажу информацию о характеристике исследуемого грунта, проецируя ее на интерфейсе ЭВМ в кабине машины.
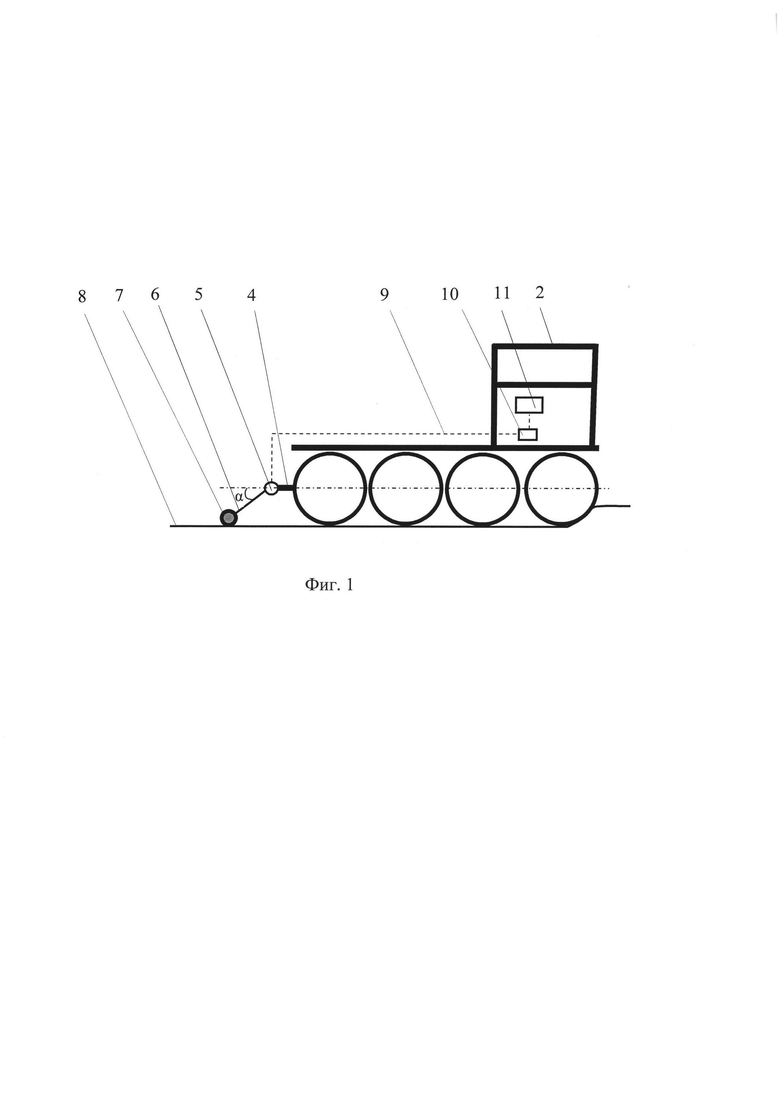
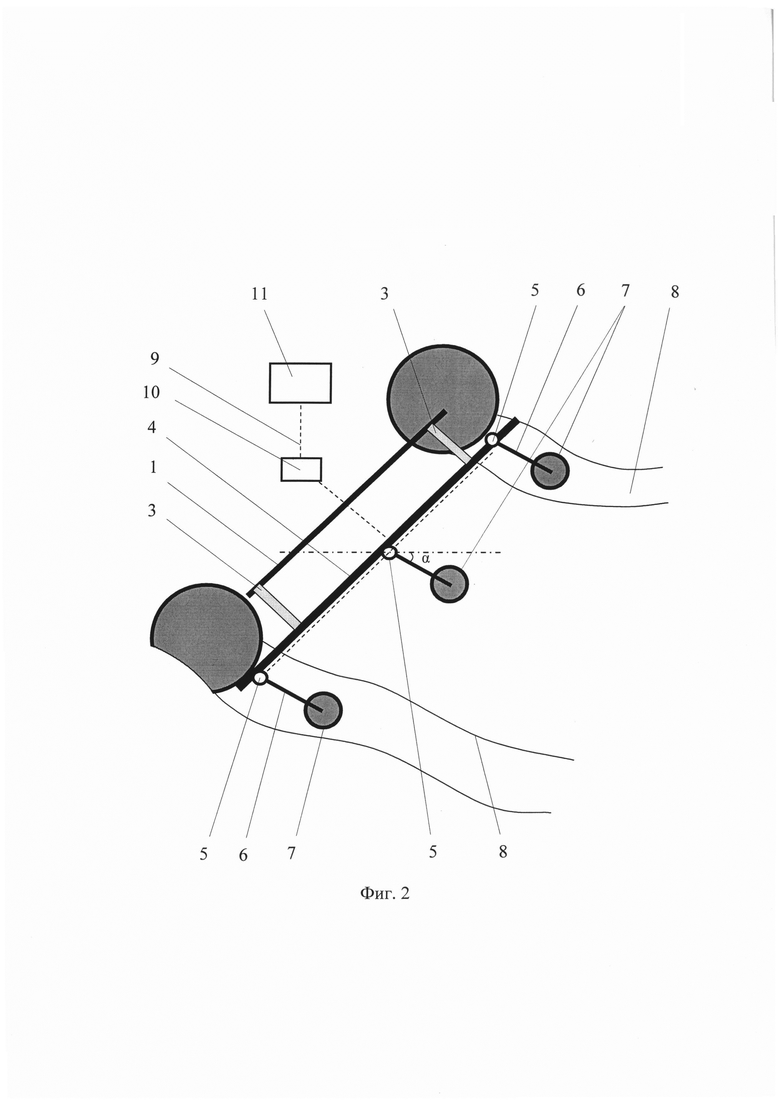
Изобретение поясняется фиг. 1 и фиг. 2 на которых показано устройство автоматического определения глубины дорожной колеи для оценки проходимости строительной техники, где: 1 - ось заднего моста; 2 - машина разведки местности; 3 - крепления; 4 - балка; 5 - энкодеры; 6 - тяги; 7 - опорные катки; 8 - грунт; 9 - электропровода; 10 - модуль интерфейса; 11 - интерфейс ЭВМ. На фиг. 1 и фиг. 2 α обозначает угол отклонения тяг 6.
Для определения глубины дорожной колеи и оценки возможности преодоления строительной техникой участков дорог со слабым грунтом на пересеченной местности используется устройство, содержащее в своем составе балку, крепящуюся при помощи крепления к оси заднего моста машины разведки местности. На балке размещается три энкодера, через которые к ней крепятся тяги, имеющие, с одной стороны, полые металлические опорные катки. Энкодер (преобразователь угловых помещений) представляет собой устройство для замеров параметров цифровыми методами, в данном случае производится измерение передвижения тяг, правой и левой относительно средней, а именно углов их поворота (от 0° до 75°). Две тяги, правая и левая, следующие за колесами машины, под своим весом давят опорными катками на грунт, а третья тяга своим опорным катком обкатывает межколейный промежуток.
Энкодеры соединены через электропровода с модулем интерфейса, который предназначен для эксплуатации в измерительно-информационных системах и является универсальным устройством связи инкрементных или абсолютных преобразователей перемещения с персональным компьютером (ПК) и преобразует сигналы преобразователей в формат, предназначенный для дальнейшей обработки средствами информационной системы.
При движении машины, опорные катки тяг, надавливая на грунт своим весом, обкатываются по нему, при этом в зависимости от глубины колеи тяги взаимно отклоняются одна относительно другой, при этом энкодеры формируют при отклонении тяг сигнал, преобразуемый модулем интерфейса и передающийся на интерфейс ПЭВМ, информируя экипаж о характеристиках исследуемого грунта и возможности преодоления строительной техникой участка пересеченной местности.
Пример работы устройства. К оси заднего моста 1 машины разведки местности 2, при помощи креплений 3 крепится балка 4, на которой через энкодеры 5 подвижно крепятся тяги 6 имеющие опорные катки 7, которые под своим собственным весом обкатываются по грунту 8. Энкодеры 5 определяют угол отклонения тяг 6 с опорными катками 7 и передают сигнал по электропроводам 9 на модуль интерфейса 10, преобразующий сигнал и передающий его по электропроводам 9 на интерфейс ЭВМ 11.
Таким образом, предложенное устройство позволяет автоматически, при движении машины с высокой точностью определять возможности преодоления строительной техникой участков дорог пересеченной местности, снизить время на преодоление препятствий.
Литература
1. Описание изобретения к авторскому свидетельству СССР SU 542096 А1 «Устройство для замера величин буксования и глубины колеи», МПК G01D 21/02; УДК 531.717.3(088.8). Заявлено: 17.02.1975, 2105253/10. Опубликовано: 05.01.1977. Бюл. №1. Авторы: Акчурин А.Г., Бекенов М.Б., Оспанкулов А.Ж. Заявитель: Казахский научно-исследовательский институт механизации и электрификации сельского хозяйства. Открытое издание.
2. Описание изобретения к авторскому свидетельству СССР SU 178505 А1 «Устройство для измерения глубины колеи в процессе движения базовой машины», МПК G01C 7/04; УДК 528.543(088.8). Заявлено: 20.11.1964, 929803/26-10. Опубликовано: 22.01.1966. Бюл. №3. Авторы: Черняев Г.Я., Воложинский Н.С., Васьков А.И., Миусов В.В., Спасибухов Ю.И., Рыжов А.А. Открытое издание.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического определения глубины дорожной колеи | 2023 |
|
RU2803018C1 |
| Автономный передвижной осветительный комплекс для производства работ на строительной площадке | 2022 |
|
RU2786757C1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПРОХОДИМОСТИ ТАНКА ПО СЛАБЫМ ГРУНТАМ | 2012 |
|
RU2496675C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1997 |
|
RU2178752C2 |
| ПНЕВМОГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2240250C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ КОЛЕИ В ПРОЦЕССЕ ДВИЖЕНИЯ БАЗОВОЙ МАШИНЫ | 1966 |
|
SU178505A1 |
| Способ автоматического развертывания уширителей гусениц | 2024 |
|
RU2839609C1 |
| МОСТОУКЛАДЧИК | 1996 |
|
RU2102555C1 |
| Многоцелевой подводный аппарат | 2023 |
|
RU2806880C1 |
Изобретение относится к области машиностроения, в частности к устройствам для определения проходимости строительной техники в условиях пересеченной местности. Устройство автоматического определения глубины дорожной колеи для оценки проходимости строительной техники характеризуется тем, что содержит три тяги, каждая из которых имеет с одной стороны опорный каток, опирающийся под своим весом на грунт, а с другой стороны тяги крепятся к энкодерам, размещаемым неподвижно на балке, скрепленной посредством крепления с осью заднего моста машины. При этом правая и левая тяги имеют возможность взаимно отклоняться относительно средней тяги в период движения машины, а энкодеры имеют возможность определять величину взаимного отклонения тяг, причем энкодеры связаны посредством электропроводов с модулем интерфейса электронно-вычислительной машины. Технический результат – повышение точности измерения, повышение надежности конструкции устройства при обеспечении автоматизации процесса определения глубины колеи пересеченной местности для ее последующего преодоления строительной техникой, значительное снижение времени на преодоление препятствий. 2 ил.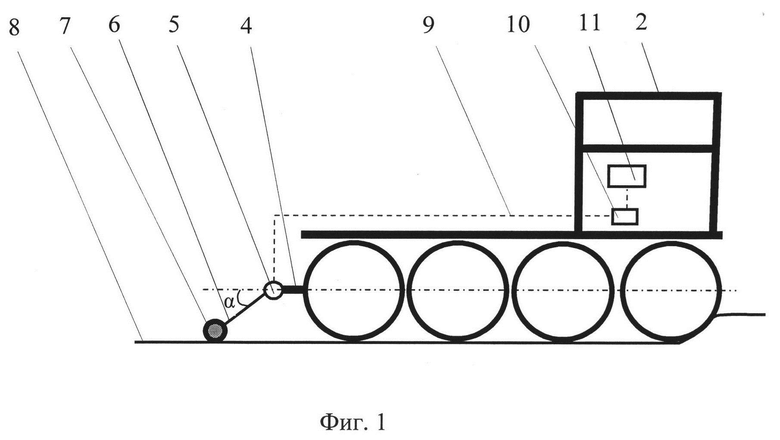
Устройство автоматического определения глубины дорожной колеи для оценки проходимости строительной техники, характеризующееся тем, что содержит три тяги, каждая из которых имеет с одной стороны опорный каток, опирающийся под своим весом на грунт, а с другой стороны тяги крепятся к энкодерам, размещаемым неподвижно на балке, скрепленной посредством крепления с осью заднего моста машины, при этом правая и левая тяги имеют возможность взаимно отклоняться относительно средней тяги в период движения машины, а энкодеры имеют возможность определять величину взаимного отклонения тяг, причем энкодеры связаны посредством электропроводов с модулем интерфейса электронно-вычислительной машины.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ КОЛЕИ В ПРОЦЕССЕ ДВИЖЕНИЯ БАЗОВОЙ МАШИНЫ | 0 |
|
SU178505A1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И СРЕДСТВО ЛОКАЛЬНОЙ ПОДСВЕТКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2372442C1 |
| Моторное реле | 1947 |
|
SU73884A1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| CN 103410079 A, 27.11.2013. | |||
