Изобретение относится к области сельскохозяйственного машиностроения, в частности к тензометрированию нагруженности рабочих органов навесных почвообрабатывающих орудий.
Известен способ групповой калибровки тензопальцев, преимущественно для измерения усилий на рабочий орган трехточечного навесного орудия, включающий размещение тензопальцев в тягах гидронавесной системы трактора, приложение усилия задаваемой величины и измерение сигналов датчиков (Патент RU 2717383, МПК G01L 5/16, опубл. 23.03.2020, Бюл. №9).
Недостатком известного способа является значительная трудоемкость, обусловленная необходимостью раздельного нагружения каждого из тензометрических пальцев с требуемой повторностью.
Известен также способ групповой градуировки датчиков силы сжатия, заключающийся в том, что размещают датчики последовательно вдоль вертикальной силовой оси силозадающего приспособления, прикладывают к датчикам заданное усилие и измеряют сигналы датчиков, отличающийся тем, что, с целью повышения точности градуировки и расширения диапазона градуировки в сторону малых усилий, перед размещением взвешивают каждый датчик, начиная со второго, измеряют выходной сигнал предыдущих датчиков и учитывают эти сигналы при построении градуировочных характеристик датчиков в начале диапазона измерения (Способ групповой градуировки датчиков силы сжатия. А.С. СССР №1670440 БИ, 1991, №30).
Недостатком известного способа являются ограниченные функциональные возможности, поскольку он предназначен для градуировки датчиков только с плоскими опорными поверхностями.
Наиболее близким аналогом является способ калибровки тензометрических пальцев, преимущественно для измерения усилий на рабочий орган трехточечного навесного орудия, включающий размещение тензометрических пальцев с тензорезисторами, приложение усилия задаваемой величины и регистрацию сигналов тензорезисторов, отличающийся тем, что тензометрические пальцы размещают в проушинах промежуточной плиты, снабженной, по крайней мере, тремя рым-болтами, усилие задаваемой величины последовательно прикладывают к каждому из рым-болтов и одновременно регистрируют электрические сигналы тензорезисторов каждого из тензометрических пальцев, при этом градуировочные коэффициенты определяют из системы уравнений, получаемых для каждого из упомянутых нагружений (пат. RU 2751451 С1, МПК G01L 25/00; опубл. 14.07.2021).
Недостатком известного способа является погрешность измерения усилий, обусловленная возможной неточностью закрепления тензодатчиков относительно геометрической оси тензометрических пальцев круглого сечения.
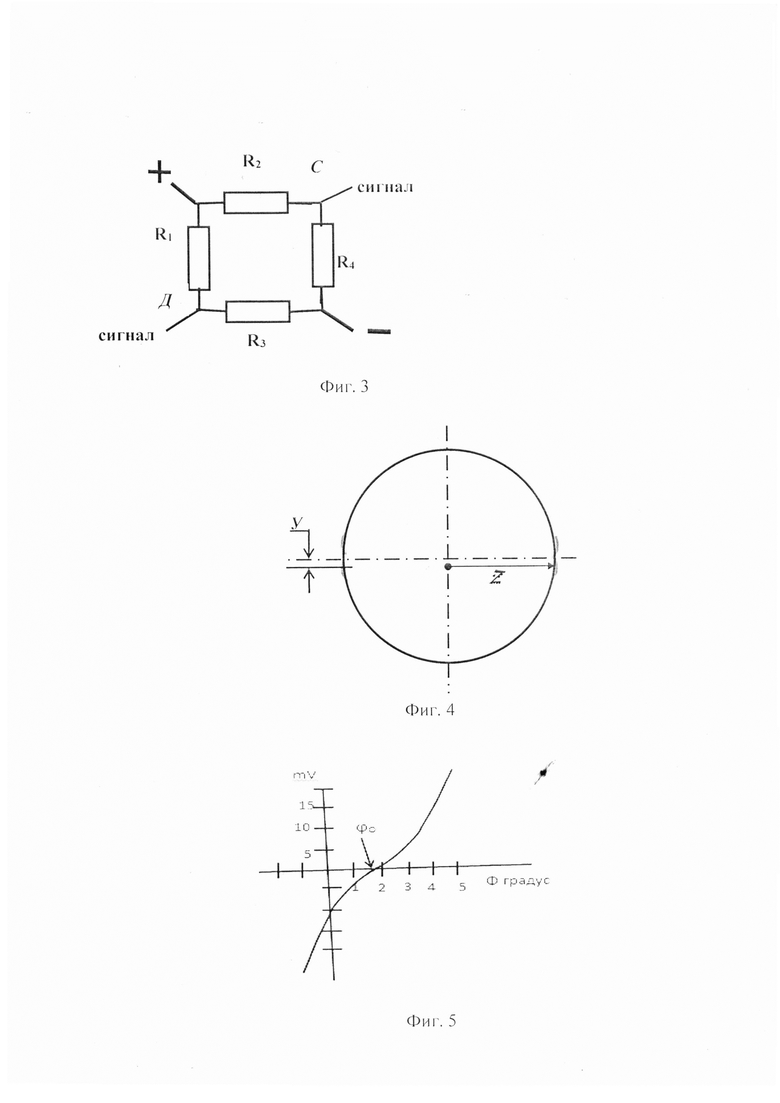
Тензометрические пальцы, используемые для определения горизонтального усилия РГ со стороны сельскохозяйственной машины на трактор, представляют собой стержни круглого сечения с наклеенными на них тензорезисторами. В случае, если кроме горизонтального усилия РГ, на палец действует и вертикальное усилие РВ, размещение тензорезисторов на пальцах должно быть таковым, чтобы РВ не оказывало влияние на показания от горизонтального усилия РГ. Это возможно, если тензорезисторы будут наклеены, как показано на фиг. 2, а именно - на одинаковом расстоянии «а» от горца стержня параллельно продольной оси стержня через 180 градусов по его окружности. Для этого предварительно на стержне наносятся кольцевая и продольные риски.
В случае равенства сопротивления тензорезисторов сигнал будет равен нулю. При деформации стержня и изменении сопротивления какого-либо тензорезистора, появляется сигнал, пропорциональный величине деформации.
При изгибе стержня от горизонтальной силы РГ относительная деформация ε в точке крепления датчика определится по формуле (1), а при изгибе стержня вертикальной силой РВ - по формуле (2)

где М - изгибающий момент в поперечном сечении С (фиг. 2), Н⋅м; У, Z - координаты точки центра тензорезистора (фиг. 4), м; Е - модуль нормального усилия материала пальца, Па; JГ и JВ - осевые моменты инерции поперечного сечения тензопальца, м4.
В идеальном случае, когда координаты для всех 4-х тензорезисторов по модулю равны между собой, и расстояния от центров тензорезисторов до торца стержня одинаковы, то вертикальное усилие РВ не будет сказываться на величине сигнала от РГ, так как Δ R1 + Δ R3 = Δ R2 + Δ R4. В реальности, абсолютно точно наклеить тензорезисторы невозможно, поэтому необходимо корректировать установку стержня тензопальца в раме.
Задача, решаемая изобретением, - устранение влияния на результаты измерения усилия, возникающего вследствие неточности геометрического расположения тензорезисторов на поверхности тензопальцев.
Технический результат - повышение точности градуировки за счет устранения влияния погрешности геометрического расположения тензорезисторов на поверхности тензопальцев.
Указанный технический результат достигается способом градуировки тензометрических пальцев круглого сечения для замера горизонтального усилия, включающим размещение на монтажной плите тензометрических пальцев с тензорезисторами, приложение усилия задаваемой величины и регистрацию сигналов тензорезисторов, отличающимся тем, что перед градуировкой усилие прикладывают в вертикальном направлении, поворачивают палец относительно его продольной оси и регистрируют электрические сигналы тензорезисторов, определяют положение, при котором сигнал от тензорезисторов будет равен нулю, после чего фиксируют это положение пальца относительно монтажной плиты, а градуировку для замера горизонтального усилия производят после разворота пальца на 90 градусов относительно найденного положения.
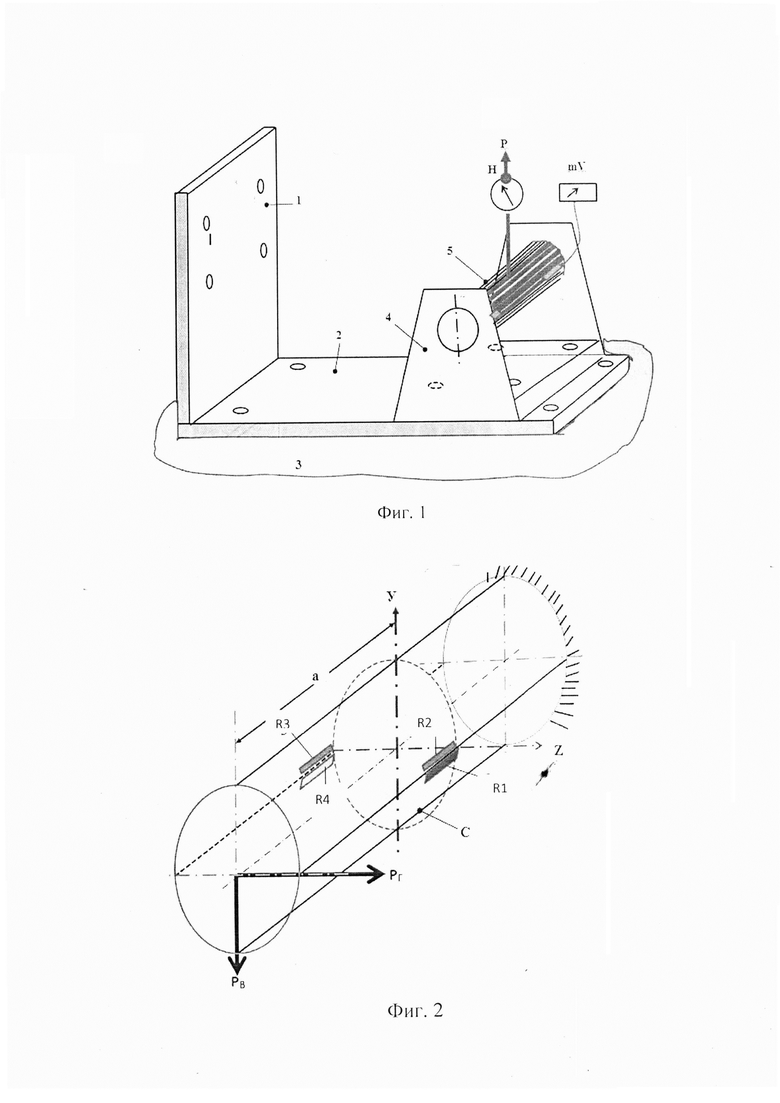
Изобретение поясняется чертежами, где на фиг. 1 изображена схема приложения усилий Р к тензопальцу; на фиг. 2 - схема расположения тензорезисторов; на фиг. 3 - электрическая схема соединения тензорезисторов; на фиг. 4 - геометрическая схема расположения центров тнзорезисторов в сечении С на фиг. 2; на фиг. 5 - диаграмма показаний электрического датчика при повороте тензопальца.
Способ реализуют следующим образом. Перед проведением градуировки, на монтажной плите с двумя взаимно перпендикулярными пластинами 1 и 2, закрепленной па основании 3, устанавливают с помощью кронштейнов 4 тензометрический палец 5 (фиг. 1) с наклеенными тензорезисторами R1 - R4 (фиг. 1 и 2), электрически соединенными по мостовой схеме (фиг. 3).
Палец 5, закрепленный на горизонтальной пластине 2, нагружают вертикальной силой Р (фиг. 1), определяют показания по измерительному прибору (mV), поворачивают на некоторый угол и получают график зависимости показаний прибора (mV) от угла ϕ (фиг. 5). По графику находят необходимое угловое положение ϕ0 тензопальца и в этом положении он должен быть зафиксирован относительно корпуса.
В этом найденном положении тензопалец 5 фиксируют относительно кронштейна 4, например, посредством вертикальной риски, наносимой на торце пальца. По этой риске палец 5 устанавливают в рабочую конструкцию, например, для измерения горизонтального усилия, передаваемого на трактор от навесного сельскохозяйственного орудия.
Затем кронштейны 4 отсоединяют от горизонтальной пластины 2 и закрепляют на вертикальной пластине 1, обеспечивая разворот на 90 градусов. После этого проводят калибровку тензопальца 5 на горизонтальное усилие, меняя его величину и фиксируя показания измерительного прибора (mV).
Таким образом, размещение на монтажной плите тензометрических пальцев, приложение усилия задаваемой величины и регистрация сигналов, перед градуировкой прикладывают вертикальное усилие, и, проворачивая палец относительно его продольной оси, регистрируют электрические сигналы, определяя положение, при котором сигнал от тензорезисторов будет равен нулю, после чего фиксируют такое найденное положение пальца, при этом градуировку тензопальца для замера горизонтального усилия производят после разворота пальца на 90 градусов относительно найденного положения (известным способом), что обеспечивает достижение заявленного технического результата.
Изобретение относится к области сельскохозяйственного машиностроения, в частности к области измерения нагруженности рабочих органов навесных почвообрабатывающих орудий. Способ включает размещение на монтажной плите тензометрических пальцев с тензорезисторами, приложение усилия задаваемой величины и регистрацию сигналов тензорезисторов. Перед градуировкой усилие прикладывают в вертикальном направлении, поворачивают палец относительно его продольной оси и регистрируют электрические сигналы тензорезисторов. Определяют положение, при котором сигнал от тензорезисторов будет равен нулю. После чего фиксируют это положение пальца относительно монтажной плиты, а градуировку для замера горизонтального усилия производят после разворота пальца на 90 градусов относительно найденного положения. Технический результат заключается в повышении точности градуировки за счет устранения влияния погрешности геометрического расположения тензорезисторов на поверхности тензопальцев. 5 ил. 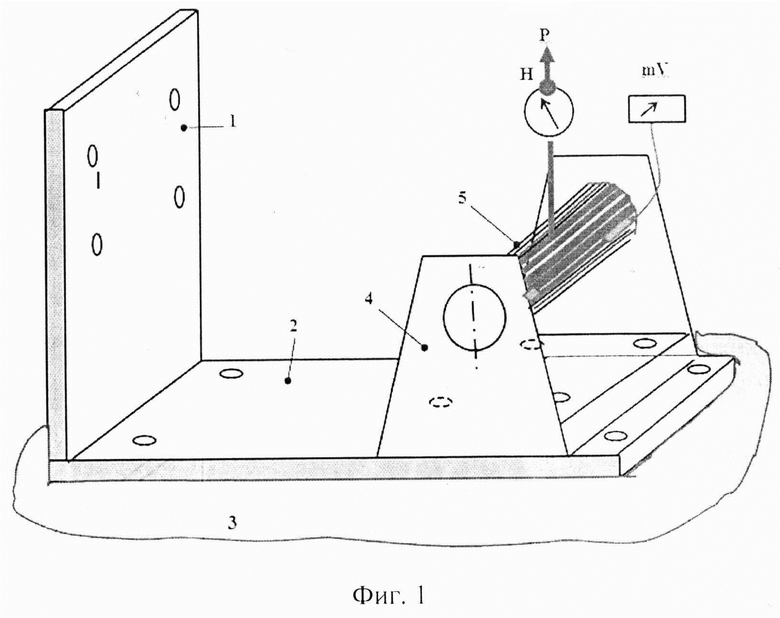
Способ градуировки тензометрических пальцев круглого сечения для замера горизонтального усилия, включающий размещение на монтажной плите тензометрических пальцев с тензорезисторами, приложение усилия задаваемой величины и регистрацию сигналов тензорезисторов, отличающийся тем, что перед градуировкой усилие прикладывают в вертикальном направлении, поворачивают палец относительно его продольной оси и регистрируют электрические сигналы тензорезисторов, определяют положение, при котором сигнал от тензорезисторов будет равен нулю, после чего фиксируют это положение пальца относительно монтажной плиты, а градуировку для замера горизонтального усилия производят после разворота пальца на 90 градусов относительно найденного положения.
| Способ групповой градуировки тензометрических пальцев преимущественно для измерения усилий на рабочий орган трехточечного навесного орудия | 2020 |
|
RU2751451C1 |
| Способ групповой градуировки датчиков силы сжатия | 1989 |
|
SU1670440A1 |
| Устройство для измерения усилий на рабочий орган сельскохозяйственных машин, преимущественно в почвенном канале | 2019 |
|
RU2717383C1 |
| Стенд для градуировки и определения жесткости ротационных динамометров и тензометрических валов | 1989 |
|
SU1749737A2 |
| US 8700270 B2 15.04.2014. | |||

