Изобретение относится к режущему устройству, выполненному и предназначенному для окончательного отделения рыбного филе от рыбы, транспортируемой в транспортном направлении Т по транспортному пути хвостом вперед и уже разрезанной по брюшной и боковой частям, причем указанное устройство содержит раму, транспортное средство, которое выполнено с возможностью приведения во вращение посредством приводного элемента, содержащего по меньшей мере один приемный элемент для обрабатываемой рыбы, и узел режущих ножей, содержащий две ножевые головки, каждая из которых содержит приводной дисковый нож, причем указанные две ножевые головки размещены на противоположных сторонах транспортного пути так, что обрабатываемая рыба может быть транспортирована по транспортному пути между дисковыми ножами, размещенными на расстоянии друг от друга.
Кроме того, изобретение относится к способу окончательного отделения рыбного филе от рыбы, транспортируемой хвостом вперед в транспортном направлении Т по транспортному пути и уже разрезанной по брюшной и боковой частям, причем способ включает следующие этапы: транспортирование обрабатываемой рыбы хвостом вперед в транспортном направлении Т по транспортному пути с помощью транспортного устройства, срезание рыбного филе параллельно хребтовой кости обрабатываемой рыбы с помощью узла режущих ножей, причем обрабатываемую рыбу транспортируют хвостом вперед и спиной вверх в направлении узла режущих ножей между двумя дисковыми ножами указанного узла, которые размещены на расстоянии друг от друга.
Такие устройства и способы разделки используют в рыбоперерабатывающей промышленности для окончательного и полного разделения рыбного филе, предварительно освобожденного от костей путем разрезания брюшной и боковой частей. Для этого обрабатываемую рыбу транспортируют хвостом вперед и брюшной стороной, т.е. спинными костями вниз в транспортном направлении Т по транспортному пути в транспортной плоскости, проходя, таким образом, через разные секции обработки. Транспортную плоскость не следует понимать как плоскость в строго математическом смысле. Скорее, транспортная плоскость описывает область плоскости, в которой рыбу транспортируют с помощью транспортного устройства. Верхняя сторона/верхняя поверхность транспортного устройства определяет плоскость Е. Данная плоскость и параллельные ей плоскости образуют область плоскости. Разрез брюшной части производят с помощью пары дисковых ножей, делая разрез по обе стороны хребтовой кости рыбы, начиная от участка хвоста по направлению к брюшной полости рыбы, причем спинную кость направляют между дисковыми ножами. Что касается глубины надреза, разрез выполняют вертикально относительно транспортного направления Т и вертикально относительно транспортной плоскости Е до уровня чуть ниже хребтовой кости. При этом рыбное филе освобождают от спинных костей с обеих сторон хребтовой кости. Благодаря тому, что рыбу непрерывно транспортируют в транспортном направлении Т, дисковые ножи делают практически холостой надрез дисковыми ножами в области брюшной полости. Надрез по бокам также выполняют, например, с помощью пары дисковых ножей. В данном случае дисковые ножи направляют вдоль фланговых костей сверху так, что рыбное филе освобождают от фланговых костей, а именно до уровня чуть ниже хребтовой кости. Несмотря на данные предварительные надрезы, части рыбного филе все еще соединены друг с другом и с костями, в частности с хребтовой костью в области спины.
Возможно выполнение спинного надреза и разделительного надреза отдельно друг от друга. Тем не менее, предпочтительно выполнение комбинированного спинного и разделительного надреза, например, с помощью режущего устройства общего типа. Для этого два дисковых ножа узла режущих ножей установлены в двух плоскостях относительно друг друга. В первой плоскости указанные два дисковых ножа поворачивают из исходного положения, в котором они отстоят друг от друга и параллельны друг другу, вокруг осей поворота, проходящих в транспортном направлении Т так, что указанные два дисковых ножа образуют V-образную форму. Другими словами, указанные два дисковых ножа наклонены в боковом/поперечном направлении относительно транспортного направления Т. В данном промежуточном положении точка Р, соответствующая наименьшему расстоянию между дисковыми ножами, находится в самой нижней точке ножей. Тем не менее, для создания "активного" положения дисковых ножей, в котором дисковые ножи обеспечивают разрезание вдоль как можно ближе к хребтовой кости, указанные два дисковых ножа поворачивают во второй плоскости вокруг поворотной оси, которая ориентирована вертикально относительно транспортной плоскости Е так, что точка Р, соответствующая наименьшему расстоянию между дисковыми ножами, удалена от самой нижней точки дисковых ножей. Это называется "активным" положением ножей, так как оно обеспечивает возможность установки положения дисковых ножей очень близко к позвоночнику/хребтовой кости для достижения максимально возможного выходного продукта. В идеальном случае точка Р, соответствующая наименьшему расстоянию, противостоит транспортному направлению Т так, что обрабатываемая рыба погружена хвостовым концом между дисковыми ножами, и разрезание обрабатываемой рыбы выполняют с наименьшим возможным расстоянием между дисковыми ножами для обеспечения разреза вдоль как можно ближе к хребтовой кости, начиная с хвоста. В известных режущих устройствах вышеупомянутого типа два дисковых ножа, расположенные V-образно друг к другу, закреплены относительно V-образного положения и относительно размера наименьшего расстояния между указанными двумя дисковыми ножами. В принципе, угол а V-образного положения и расстояние Р могут быть установлены до запуска режущего устройства. Тем не менее, обработка рыбы происходит при заданных значениях. Так как обрабатываемая рыба различается по размеру, и хребтовая кость рыбы также различается по ширине и очертаниям по мере продвижения от хвоста к голове, а установка дисковых ножей слишком близко друг к другу сопряжена с риском врезания дисковых ножей в хребтовую кость, дисковые ножи должны быть установлены для самой крупной рыбы или для самого широкого участка хребтовой кости с учетом угла α и, в частности, с учетом расстояния Р. Тем не менее, это приводит к соответствующему снижению количества выходного продукта, так как при установке дисковых ножей на крупную или среднюю рыбу или широкие хребтовые кости дисковые ножи не проходят так близко, как требуется в случае хребтовой кости более мелкой рыбы и более узкого участка хребтовой кости. В результате в области позвоночника и/или хребтовых костей остается ценная часть филе, которая не доступна дисковым ножам, так как расстояние между дисковыми ножами слишком велико. Возможные аномалии хребтовых костей, например, выступы, наросты, деформации и т.п. не могут быть компенсированы, в результате чего дисковые ножи, которые закреплены на определенном расстоянии, врезаются в хребтовую кость. Проблема врезания усугублена подпружиненным предварительным натяжением закрепленных дисковых ножей, так как дисковые ножи в данном случае практически "втягиваются" в хребтовую кость за счет "активного" положения лезвий.
Таким образом, целью изобретения является создание простого и надежного режущего устройства, которое автоматически обеспечивает индивидуальное и переменное управление разрезанием. Кроме того, цель состоит в предложении способа, с помощью которого окончательное отделение рыбного филе от хребтовой кости осуществляют с максимальным выходом продукта без риска надрезов хребтовой кости.
Данная цель достигнута с помощью режущего устройства вышеупомянутого типа, в котором для изменения расстояния между дисковыми ножами ножевые головки установлены с возможностью перемещения на раме, а узел режущих ножей содержит по меньшей мере один чувствительный элемент, который закреплен на одной из подвижных ножевых головок, причем каждый чувствительный элемент расположен на ножевой головке за режущими кромками дисковых ножей, если смотреть в транспортном направлении Т, причем указанные режущие кромки направлены против транспортного направления Т, и выступает за соответствующую режущую кромку, если смотреть в направлении, поперечном транспортному направлению Т, в направлении центральной оси транспортного устройства и, таким образом, обрабатываемой рыбы. Ножевые головки установлены с возможностью перемещения по отдельности или синхронно по направлению к центральной оси транспортного устройства и, следовательно, обрабатываемой рыбы и в сторону от нее/них, т.е. поперечно транспортному направлению Т. Узел режущих ножей или ножевые головки узла режущих ножей предпочтительно установлены так, что они по существу выполнены с возможностью свободного колебания. Это означает, что ножевые головки выполнены с возможностью свободного, даже если только противодействуя сопротивлению усилия пружины или т.п., перемещения в сторону от обрабатываемой рыбы или ее частей.
Указанный по меньшей мере один чувствительный элемент обеспечивает механическую связь между чувствительным элементом и ножевой головкой для управления ножевыми головками, с помощью которой можно отдельно регулировать расстояние между дисковыми ножами и хребтовой костью. Когда дисковые ножи сначала ударяют по рыбе, транспортируемой хвостом вперед и спиной вверх, своими режущими кромками, направленными в направлении, противоположном транспортному направлению Т, рыбное филе срезают со спинной стороны, и хребтовая кость по меньшей мере частично открывается. Чувствительный элемент, расположенный в транспортном направлении Т за дисковыми ножами или по меньшей мере за режущими кромками, направленными в направлении, противоположном транспортному направлению Т, входит в данный надрез и проходит вдоль хребтовой кости с внешней стороны. Тот факт, что чувствительный элемент проходит вдоль твердого костного материала, обеспечивает точное обнаружение и, соответственно, точное управление, так что, например, при изменениях размера и/или контура хребтовой кости происходит незамедлительное перемещение дисковых ножей с траектории.
Так как чувствительный элемент находится ближе к центральной оси транспортного устройства и, таким образом, ближе к хребтовой кости рыбы, чем дисковые ножи, любое отклонение/изменение очертаний хребтовой кости, например, из-за разных размеров рыбы, увеличения размера хребтовой кости от хвоста к голове и/или аномалий в области хребтовой кости, выявляется чувствительным элементом и передается напрямую на дисковые ножи, так что смещение чувствительных элементов с траектории неизбежно приводит к смещению ножевых головок и, следовательно, дисковых ножей с траектории. В результате, с одной стороны, дисковые ножи устанавливают по отдельности для каждой рыбы как можно ближе к хребтовой кости для получения максимального выхода продукта, а, с другой стороны, чувствительный элемент предотвращает проникновение дисковых ножей в хребтовую кость. Проще говоря, каждый чувствительный элемент сканирует соответствующую ширину/контур хребтовой кости в транспортном направлении Т за дисковыми ножами, но близко к ним, так что отклонения каждого чувствительного элемента, инициированные хребтовой костью, немедленно и непосредственно приводят к отклонению ножевых головок с дисковыми ножами. Таким образом, каждый чувствительный элемент предотвращает образование слишком маленького расстояния между дисковыми ножами, что эффективно предотвращает врезание в хребтовую кость с вытекающими последствиями в виде износа, застревания или остатков костей в рыбном филе.
Предпочтительный вариант выполнения отличается тем, что указанные две ножевые головки выполнены с возможностью управления отдельно друг от друга, причем для каждой ножевой головки обеспечен свой чувствительный элемент, при этом два чувствительных элемента размещены на расстоянии друг от друга на противоположных сторонах транспортного пути. Как уже упоминалось, обеспечено управление обеими ножевыми головками с помощью одного чувствительного элемента, например, с помощью соответствующих имитационных схем управления и/или синхронизации. Тем не менее, предпочтительным является индивидуальное управление каждой ножевой головкой в отдельности. Благодаря тому, что каждая сторона хребтовой кости может быть отсканирована индивидуально отдельным чувствительным элементом, возможно, в частности, управлять только одним из дисковых ножей в стороне от самой узкой части вдоль хребтовой кости, если, например, на одной стороне хребтовой кости есть деформация, при этом второй дисковый нож на противоположной стороне может и дальше направляться по самой узкой части, в результате чего достигнуто дополнительное увеличение выхода продукта.
Целесообразно, если расстояние между чувствительными элементами поперечно транспортному направлению Т меньше, чем расстояние между режущими кромками дисковых ножей поперечно транспортному направлению Т. Другими словами, два противоположных чувствительных элемента образуют более узкий проходной канал для обрабатываемой рыбы, чем два противоположных дисковых ножа. Это надежно гарантирует, что любое изменение контура хребтовой кости, приводящее к отклонению чувствительного элемента, своевременно передается на дисковые ножи. Чувствительные элементы обнаруживают любое препятствие на хребтовой кости вдоль транспортного пути до того, как дисковые ножи достигнут этого препятствия, и посредством механического соединения с ножевыми головками обеспечивают своевременное отклонение дисковых ножей на такое расстояние, что столкновение дисковых ножей с хребтовой костью или ее частями исключено.
Преимущественно, указанные две ножевые головки расположены каждая на свободном конце опорного плеча, причем опорные плечи имеют общую ось S поворота над транспортным устройством, которая проходит в транспортном направлении Т и расположена на или над центральной осью транспортного устройства и, таким образом, обрабатываемой рыбы. С одной стороны, ось S поворота и ее ориентация обеспечивают по существу свободный поворот ножевых головок вокруг оси S. С другой стороны, создано симметричное расположение ножевых головок относительно обрабатываемой рыбы, что обеспечивает легкое и точное управление ножевыми головками, т.е. может быть обеспечено прямое и точное уклонение ножевых головок, инициируемое каждым чувствительным элементом.
Предпочтительный вариант отличается тем, что указанные две ножевые головки по отдельности установлены с их опорными плечами на раме с возможностью поворота вокруг оси S поворота, при этом указанные два опорных плеча и, соответственно, ножевые головки предварительно прижаты пружинным элементом против смещения относительно центральной оси транспортного устройства и, соответственно, обрабатываемой рыбы, так что в исходном положении дисковые ножи отстоят друг от друга на заданное минимальное расстояние. Усилие пружины обеспечивает определенное давление дисковых ножей на хребтовую кость рыбы. Усилие пружины может быть приложено, например, с помощью пневматического цилиндра. Тем не менее, предпочтительно, простая спиральная пружина, например, натянутая между указанными двумя опорными плечами так, что спиральная пружина выполнена с возможностью притягивания указанных двух опорных плеч друг к другу. Как вариант, для приложения усилия возможно использование магнитных средств. С одной стороны, упор для каждого опорного плеча предотвращает столкновение указанных двух дисковых ножей друг с другом, а, с другой стороны, он обеспечивает заданное фиксированное минимальное расстояние между двумя дисковыми ножами.
Преимущественно, опорные плечи выполнены с возможностью регулирования для обеспечения регулирования минимального расстояния между дисковыми ножами. Например, в качестве опоры может служить простой винт или т.п. Путем поворота винта, к которому прижаты опорные плечи или головки ножей, возможно простое увеличение или уменьшение расстояния между головками ножей и дисковыми ножами. Также возможно использование других приводных элементов для предварительной установки расстояния между дисковыми ножами.
Предпочтительно каждый чувствительный элемент выполнен с возможностью регулирования для обеспечения возможности регулирования расстояния от центральной оси транспортного устройства и, таким образом, от обрабатываемой рыбы и ее хребтовой кости. Для этого каждый чувствительный элемент предпочтительно свободно прикреплен к ножевой головке. Особенно простое решение обеспечено для чувствительных элементов, которые выполнены с возможностью регулирования путем ослабления винта, регулирования расстояния и затягивания винта. Также возможно использование других приводных элементов для предварительной установки расстояния между чувствительными элементами и центральной осью транспортного устройства и, таким образом, обрабатываемой рыбой и ее хребтовой костью.
Преимущественно, расстояние между режущими кромками дисковых ножей, направленных против транспортного направления Т с одной стороны и каждым чувствительным элементом в транспортном направлении Т с другой стороны составляет от 5 до 50 мм, предпочтительно от 10 до 30 мм. Как уже было объяснено, в транспортном направлении Т каждый чувствительный элемент расположен вблизи за режущими кромками дисковых ножей, направленных против транспортного направления Т, с которыми обрабатываемая рыба контактирует в первую очередь. Из эмпирических исследований известно, что хребтовая кость в основном не имеет резких изменений в размерах, а изменяется по существу непрерывно и, в частности, становится шире, начиная с хвостовой части по направлению к головной части. Так как каждый чувствительный элемент расположен непосредственно за режущими кромками дисковых ножей в транспортном направлении Т, движение уклонения/отклонения чувствительных элементов и, таким образом, ножевых головок с дисковыми ножами все еще достаточно для значительного увеличения расстояния между дисковыми ножами.
Преимущественный вариант отличается тем, что каждая ножевая головка содержит отклоняющий элемент, который содержит первую отклоняющую часть, расположенную на внутренней стороне дисковых ножей, направленных к центральной оси М транспортного устройства и, соответственно, обрабатываемой рыбы, и вторую отклоняющую часть, которая проходит с изгибанием от первой отклоняющей части в сторону от центральной оси М транспортного устройства и, соответственно, обрабатываемой рыбы. Отклоняющий элемент предотвращает повторную нарезку рыбного филе, разрезанного дисковыми ножами. Другими словами, отклоняющий элемент защищает уже срезанные участки рыбного филе от повторного контакта с режущими кромками дисковых ножей.
Каждый чувствительный элемент предпочтительно выполнен в виде единого целого с отклоняющим элементом. Это обеспечивает особенно простую конструкцию, так как несколько функций обеспечены одним компонентом. Например, отклоняющий элемент может содержать пальцеобразный чувствительный элемент в продолжении отклоняющей части, которая проходит по транспортному пути обрабатываемой рыбы. Тем не менее, возможно использование других вариантов конфигурации чувствительного элемента, например, в виде отдельных чувствительных средств.
Предпочтительный вариант выполнения отличается тем, что ножевые головки и/или дисковые ножи выполнены, с одной стороны, с возможностью поворота и/или регулирования относительно осей, проходящих в транспортном направлении Т и, с другой стороны, с возможностью поворота и/или регулирования относительно осей, выровненных вертикально относительно транспортной плоскости. Это обеспечивает, особенно просто и точно, оптимальную предварительную установку дисковых ножей для оптимального по выходу продукта среза.
Цель также достигнута благодаря способу с вышеупомянутыми этапами, в котором дисковые ножи регулируют относительно их расстояния друг от друга с помощью по меньшей мере одного чувствительного элемента, который направляют в транспортном направлении Т за режущими кромками дисковых ножей, направленных против транспортного направления Т, в боковом направлении вдоль хребтовой кости рыбы, которая открывается при разрезании.
Обеспечиваемые преимущества уже были описаны для режущего устройства, поэтому, чтобы избежать повторов, на соответствующие части описания сделана ссылка. Наконец, чувствительные элементы определяют любое отклонение хребтовой кости и обеспечивают перемещение дисковых ножей с пути до того, как они достигнут выявленные отклонения.
Предпочтительно, дисковые ножи, в зависимости от перемещения чувствительных элементов, перемещают по отдельности поперечно транспортному направлению Т в сторону от хребтовой кости и в направлении к хребтовой кости с помощью механического соединения между чувствительным элементом и ножевыми головками, содержащими дисковые ножи.
Согласно данному изобретению ширину хребтовой кости сканируют каждым чувствительным элементом на участке хребтовой кости, который уже прошел дисковые ножи.
Особенно предпочтительно, способ осуществляют с помощью режущего устройства по одному или более пп. 1-11 формулы изобретения.
Преимущества, обеспечиваемые этапами способа, описанными выше, уже были указаны выше в отношении режущего устройства, поэтому во избежание повторов на соответствующие части описания сделана ссылка.
Дальнейшие целесообразные и/или преимущественные признаки и конфигурации режущего устройства и способа вытекают из зависимых пунктов формулы изобретения и описания. Особенно предпочтительные варианты выполнения режущего устройства и способа пояснены подробнее со ссылкой на прилагаемые чертежи.
На чертежах:
Фиг. 1 схематично изображает в аксонометрии соответствующие компоненты режущего устройства согласно изобретению,
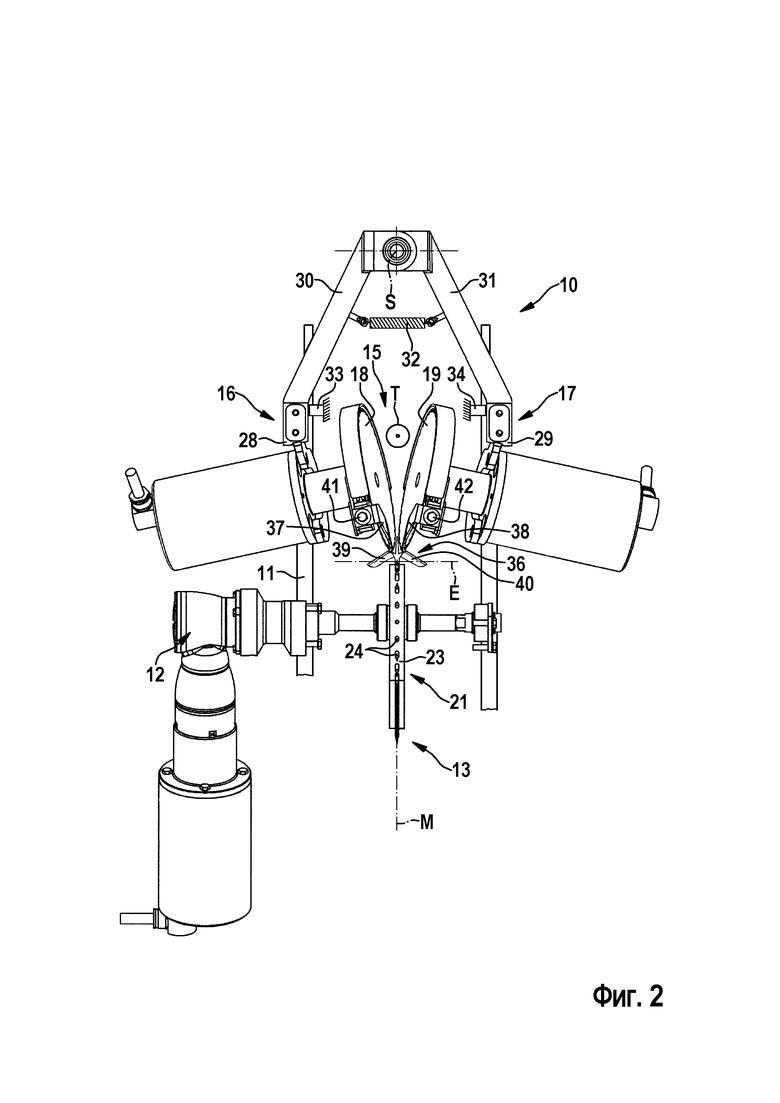
Фиг. 2 изображает вид спереди режущего устройства против транспортного направления Т,
Фиг. 3 изображает вид сверху узла режущих ножей,
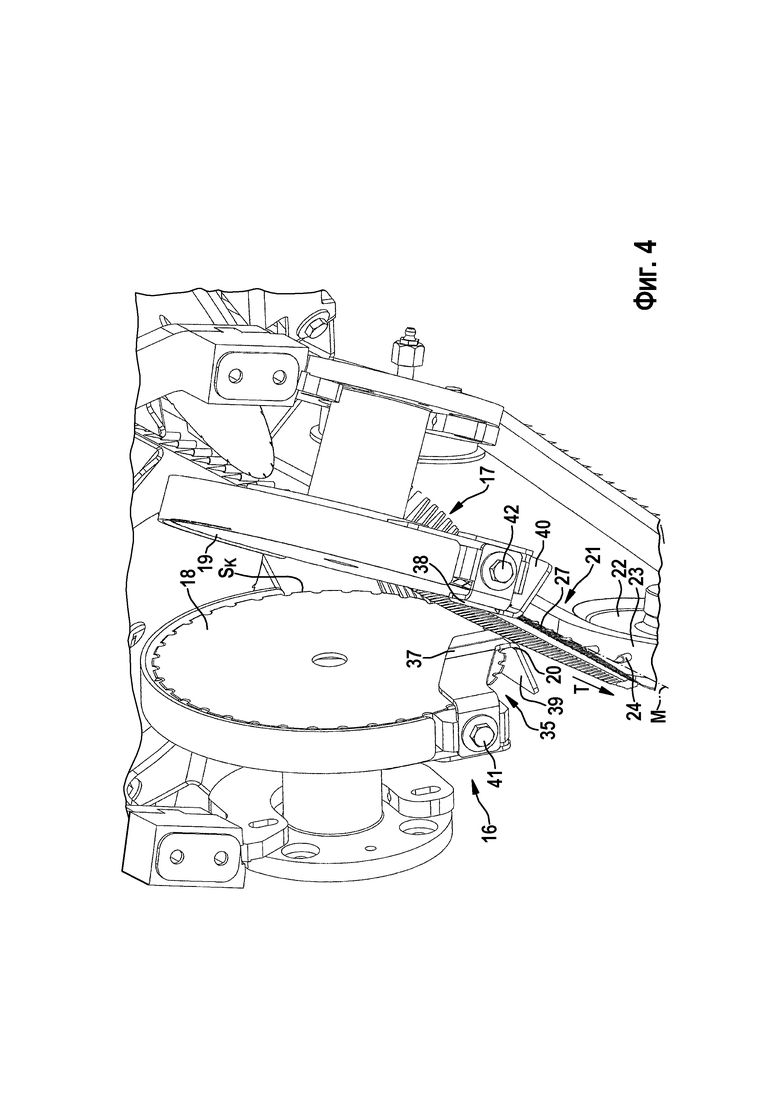
Фиг. 4 схематично изображает в аксонометрии ножевую головку с отклоняющим элементом и чувствительным элементом и
Фиг. 3(а-с) схематично изображают режущее устройство в разных положениях обработки.
Показанное на чертежах режущее устройство предназначено и выполнено с возможностью окончательного отделения рыбного филе от рыбы, которую транспортируют хвостом вперед в транспортном направлении Т по транспортному пути и которая уже разрезана по брюшной и боковой частям.
Показанное режущее устройство 10 содержит раму 11, транспортное средство 13, которое выполнено с возможностью приведения во вращение посредством приводного элемента 12 и содержит по меньшей мере один приемный элемент 14 для обрабатываемой рыбы, и узел 15 режущих ножей, содержащий две ножевые головки 16, 17, каждая из которых содержит приводной дисковый нож 18, 19, причем указанные две ножевые головки 16, 17 расположены на противоположных сторонах транспортного пути так, что обрабатываемая рыба может быть транспортирована по транспортному пути между дисковыми ножами 18, 19, размещенными на расстоянии друг от друга.
Режущее устройство 10 согласно изобретению отличается тем, что для изменения расстояния между дисковыми ножами 18, 19 ножевые головки 16, 17 подвижно установлены на раме 11, и тем, что узел 15 режущих ножей содержит по меньшей мере один чувствительный элемент 20, который закреплен на одной из подвижных ножевых головок 16, 17, причем каждый чувствительный элемент 20 расположен на ножевой головке 16, 17 за режущими кромками SK дисковых ножей 18, 19, если смотреть в транспортном направлении Т, причем указанные режущие кромки направлены против транспортного направления Т, и выступает за пределы соответствующей режущей кромки SK, если смотреть в направлении, поперечном транспортному направлению Т, в направлении центральной оси М транспортного средства 13 и, соответственно, обрабатываемой рыбы.
Режущее устройство 10 может быть выполнено в виде автономной станции обработки. Предпочтительно, последующие станции обработки, такие как узел режущих ножей для разрезания брюшной части, узел режущих ножей для разрезания боковой части и узел режущих ножей для разрезания подвздошной кости, расположены вдоль транспортного пути в транспортном направлении Т выше по потоку от режущего устройства 10 или выше по потоку от узла 15 режущих ножей для выполнения спинного/разделительного разреза, образуя технологическую линию. Режущее устройство 10 согласно изобретению может содержать средство независимого управления и/или регулирования. Предпочтительно, линия обработки содержит управляющее и/или регулирующее средство более высокого уровня, к которому подключены отдельные станции обработки.
Описанные ниже признаки и варианты, взятые по отдельности или в сочетании друг с другом, иллюстрируют предпочтительные варианты выполнения. Особо следует отметить, что признаки, которые обобщены в формуле изобретения, и/или в описании, и/или на чертежах, или описаны в общем варианте выполнения, могут также способствовать дальнейшему развитию описанного выше режущего устройства 10 функционально независимым образом.
Режущее устройство 10 предпочтительно предназначено и выполнено так, что обрабатываемую рыбу транспортируют не только хвостом вперед в транспортном направлении Т, но также и спиной вверх. Транспортное средство 13 ориентировано так, что образована по существу горизонтальная транспортная плоскость Е, несмотря на то, что возможны транспортные плоскости, наклоненные относительно горизонтального направления. Узел 15 режущих ножей предпочтительно расположен над транспортным средством 13. Транспортное средство 13, например, содержит транспортную цепь или транспортную ленту. В показанном варианте выполнения транспортное средство 13 представляет собой шиповую ленту 21, которая выполнена с возможностью направления с вращением и/или перемещения вокруг отклоняющих и/или приводных элементов 22. Шиповая лента 21, представляющая собой бесконечную конвейерную ленту 23 с шипообразными насадками 24 в качестве приемных элементов 14 для транспортируемой рыбы, содержит транспортный ход 25 и обратный ход 26. Узел 15 режущих ножей расположен над транспортным ходом 25.
Обрабатываемая рыба попадает на узел 15 режущих ножей хвостом вперед. Хвост проходит между дисковыми ножами 18, 19, которые расположены на расстоянии друг от друга. Затем дисковые ножи 18, 19 ударяют по рыбе своими режущими кромками SK, направленными против транспортного направления Т. При транспортировке рыбы в транспортном направлении Т дисковые ножи 18, 19 выполняют срез с обеих сторон вдоль хребтовой кости рыбы и обеспечивают полное отделение рыбного филе от костей.
Ножевые головки 16, 17 выполнены с возможностью синхронного управления с помощью соответствующей имитационной схемы/конструкции. Тем не менее, предпочтительно, указанные две ножевые головки 16, 17 выполнены с возможностью управления отдельно друг от друга, причем каждая ножевая головка 16, 17 оснащена своим чувствительным элементом 20, 27, и указанные два чувствительных элемента 20, 27 размещены на расстоянии друг от друга на противоположных сторонах транспортного пути. Управление ножевыми головками 16, 17 обеспечивает подвижность ножевых головок 16, 17 и, таким образом, позиционирование дисковых ножей 18, 19 относительно обрабатываемой рыбы. Благодаря конфигурации с отдельно управляемыми ножевыми головками 16, 17 каждая ножевая головка 16, 17 может перемещаться и управляться индивидуально. Каждая ножевая головка 16, 17 имеет свой чувствительный элемент 20, 27, так что во время обработки каждая ножевая головка 16, 17 может быть индивидуально расположена оптимальным образом относительно обрабатываемой рыбы благодаря механическому соединению со своим чувствительным элементом 20, 27 в зависимости от, например, изгиба и/или контура и/или размера хребтовой кости.
Расстояние А между чувствительными элементами 20, 27 поперечно транспортному направлению Т меньше, чем расстояние В между режущими кромками SK между дисковыми ножами 18, 19 поперечно транспортному направлению Т. Это означает, что на любой стадии обработки чувствительные элементы 20, 27 находятся ближе к центральной оси М транспортного устройства 13 и, следовательно, к обрабатываемой рыбе и ее хребтовой кости, чем дисковые ножи 18, 19 с их режущими кромками SK в области их наименьшего расстояния В1. На Фиг. 5а-с показаны различные стадии обработки посредством режущего устройства 10. На Фиг. 3а обрабатываемая рыба размещена прямо так, что хвостовой конец расположен между дисковыми ножами 18, 19. Дисковые ножи 18, 19 или их режущие кромки SK имеют заданное минимальное расстояние B1. Чувствительные элементы 20,27 расположены на расстоянии A1, причем A1<В1. По мере транспортировки рыба достигает чувствительных элементов 20, 27 своей хребтовой костью, открываемой с помощью дисковых ножей 18, 19. Хребтовая кость обычно имеет увеличивающуюся ширину, начиная с хвостового конца по направлению к головному концу. На Фиг. 5b хребтовая кость только что достигла чувствительных элементов 20, 27, тем не менее, ширина хребтовой кости в данной области все еще соответствует расстоянию А2 между чувствительными элементами, причем А2=A1, так что отклонения еще не происходит. Соответственно, расстояние В2 между режущими кромками SK дисковых ножей 18, 19 остается неизменным, а именно В2=B1. На Фиг. 5 с хребтовая кость расположена между чувствительными элементами 20, 27 с шириной, которая больше A1=А2. Соответственно, чувствительные элементы 20, 27 выполнены с возможностью отклонения в боковом направлении. В результате чего чувствительные элементы 20, 27 расположены на расстоянии А3, причем А3>A1=А2. Благодаря механическому соединению чувствительных элементов 20, 27 и ножевых головок 16, 17 расстояние В3 между режущими кромками SK дисковых ножей 18, 19 больше, чем B1=В2. При равномерной форме хребтовой кости обеспечено синхронное перемещение ножевых головок 16, 17. В случае, если хребтовая кость, например, имеет деформацию с одной стороны, расстояние В3 и, следовательно, А3 будет изменено только путем перемещения одной ножевой головки 16 или 17.
Ножевые головки 16, 17 могут быть установлены на раме 11 с возможностью прямого перемещения. Предпочтительно, указанные две ножевые головки 16, 17 расположены каждая на свободном конце 28, 29 опорных плеч 30, 31, причем опорные плечи 30, 31 имеют общую ось S поворота над транспортным средством 13, причем ось поворота проходит в транспортном направлении Т и расположена на или над центральной осью транспортного средства 13 и, соответственно, обрабатываемой рыбы (см., в частности, Фиг. 2). Как вариант, опорные плечи 30, 31 могут быть установлены по существу свободно качающимися так, что ножевые головки 16, 17, в частности, благодаря выполнению опорных плеч 30, 31 в форме кронштейна, предназначены и выполнены с возможностью поворота вокруг оси S поворота по направлению к центральной оси М. Предпочтительно, указанные две ножевые головки 16, 17 по отдельности установлены с помощью своих опорных плеч 30, 31 на раме 11 так, что обеспечена возможность их поворота вокруг оси S, при этом указанные два опорных плеча 30, 31 и, соответственно, ножевые головки 16, 17 предварительно напряжены посредством пружинного элемента 32 друг к другу, противодействуя опорам 33, 34 в направлении центральной оси М транспортного средства 13 и, соответственно, обрабатываемой рыбы, так что в исходном положении дисковые ножи 18, 19 отстоят друг от друга на заданное минимальное расстояние B1 (см. Фиг. 5а).
Для каждого опорного плеча 30, 31 могут быть предусмотрены отдельные пружинные элементы 32. Пневматические цилиндры или подобные элементы также рассматриваются как пружинные элементы 32. Усилие пружины может быть отрегулировано, в частности при использовании пневматических цилиндров. Особенно предпочтительно, пружинный элемент 32, проходящий по транспортному пути, расположен между двумя опорными плечами 30, 31 поперечно транспортному направлению Т.
Опоры 33, 34 могут представлять собой закрепленные опорные болты или т.п. Тем не менее, предпочтительно, опоры 33, 34 для опорных плеч 30, 31 выполнены с возможностью регулирования так, чтобы регулировать расстояние В и, в частности, минимальное расстояние B1. между дисковыми ножами 18, 19. Как описано, опоры 33, 34 могут быть механическими элементами. В других вариантах выполнения перемещение ножевых головок 16, 17 может также предотвращаться или ограничиваться электромеханическим или электронным путем.
Предпочтительно, каждый чувствительный элемент 20, 27 также выполнен с возможностью регулирования так, чтобы регулировать расстояние А от центральной оси М транспортного средства 13 и, таким образом, от обрабатываемой рыбы и ее хребтовой кости. В простых вариантах выполнения чувствительные элементы 20, 27 установлены на фиксированном минимальном расстоянии А1. Благодаря регулируемой конфигурации минимальное расстояние A1 может быть заранее задано индивидуально.
Как описано выше, чувствительные элементы 20, 27, если смотреть в транспортном направлении Т, расположены вблизи за режущими кромками SK дисковых ножей 18, 19. Близкое расположение, например, зависит от формы и/или очертаний и/или ширины хребтовой кости и обычно означает, что расстояние настолько велико, что обнаружение/распознавание возможных утолщений неизбежно приводит к тому, что дисковые ножи все еще своевременно перемещаются наружу для предотвращения врезания в хребтовую кость. В частности, расстояние V между режущими кромками SK дисковых ножей 18, 19, направленных против транспортного направления Т, с одной стороны, и каждым чувствительным элементом 20, 27 в транспортном направлении Т, с другой стороны, составляет от 5 до 50 мм и предпочтительно от 10 до 30 мм.
Как вариант, каждая ножевая головка 16, 17 оснащена отклоняющим элементом 35, 36, который имеет первую отклоняющую часть 37, 38, расположенную на внутренней стороне дисковых ножей 18, 19, направленных к центральной оси М транспортного средства 13 и, соответственно, обрабатываемой рыбы, и вторую отклоняющую часть 39,40, которая проходит с изгибом в сторону от первой отклоняющей части 37, 38 и в сторону от центральной оси М транспортного средства 13 и, соответственно, обрабатываемой рыбы. Каждый чувствительный элемент 20, 27 предпочтительно выполнен в виде единого целого с отклоняющим элементом 35, 36. В показанных вариантах выполнения чувствительный элемент 20, 27 является частичным продолжением второй отклоняющей части 39, 40. Отклоняющий элемент 35, 36, содержащий чувствительный элемент 20, 27, с возможностью отсоединения прикреплен к ножевой головке 16, 17, например, с помощью винтов 41, 42.
Дисковые ножи 18, 19 выполнены с возможностью регулирования их положения или наклона. Это может быть реализовано путем регулирования ножевых головок 16, 17 или самих дисковых ножей 18, 19. Для регулирования/перемещения ножевые головки 16, 17 и/или дисковые ножи 18, 19 выполнены, с одной стороны, с возможностью поворота и/или регулирования относительно осей, проходящих в транспортном направлении Т, и, с другой стороны, с возможностью поворота и/или регулирования относительно осей, выровненных вертикально относительно транспортной плоскости Е.
Способ согласно данному изобретению описан ниже, в частности со ссылками на Фиг. 5(а - с).
Способ применяют для окончательного отделения рыбного филе от рыбы, которую транспортируют хвостом вперед в транспортном направлении Т по транспортному пути и которая уже разрезана по брюшной и боковой частям. Для этого обрабатываемую рыбу транспортируют хвостом вперед в транспортном направлении Т по транспортному пути с помощью транспортного средства 13. Брюшная сторона со спинной костью направлена вниз. Спинная сторона с брюшными костями направлена вверх. Во время транспортировки по транспортному пути рыбное филе срезают параллельно хребтовой кости обрабатываемой рыбы с помощью узла 15 режущих ножей, причем обрабатываемую рыбу транспортируют хвостом вперед и спиной вверх в направлении узла 15 режущих ножей между двумя дисковыми ножами 18, 19 указанного узла 15, размещенными на расстоянии друг от друга.
Данный способ согласно изобретению отличается тем, управление дисковыми ножами 18, 19 выполняют относительного их расстояния друг от друга с помощью по меньшей мере одного чувствительного элемента 20, 27, который направляют в транспортном направлении Т за режущими кромками SK дисковых ножей 18, 19, направленных против транспортного направления Т, в боковом направлении относительно хребтовой кости рыбы, которую открывают путем разрезания. Дисковые ножи 18, 19 могут быть отрегулированы до оптимального положения в каждом случае во время резки, поскольку каждый чувствительный элемент практически воспринимает имеющиеся изменения в размере/ширине/контуре хребтовой кости и передает соответствующие отклоняющие перемещения дисковым ножам. Благодаря тому, что исходное/наименьшее расстояние А двух противоположных чувствительных элементов 20, 27 меньше, чем исходное/наименынее расстояние В расположенных напротив друг друга дисковых ножей 18, 19, сканирование хребтовой кости в транспортном направлении Т за режущими кромками SK дисковых ножей 18, 19 все равно приводит к своевременному увеличению расстояния между дисковыми ножами 18, 19. Предпочтительно, ширину хребтовой кости сканируют каждым чувствительным элементом 20, 27 на участке хребтовой кости, который уже прошел дисковые ножи 18, 19.
Предпочтительно, дисковые ножи 18, 19, в зависимости от перемещения чувствительных элементов 20, 27, перемещают по отдельности, поперечно транспортному направлению Т, в сторону от хребтовой кости и в направлении к хребтовой кости посредством механического соединения между чувствительным элементом 20, 27 и ножевыми головками 16, 17, содержащими дисковые ножи 18, 19. Таким образом, каждый дисковый нож 18, 19 проходит по индивидуальному пути вдоль хребтовой кости в зависимости от положения чувствительного элемента 20, 27, назначенного в каждом случае. Как только рыба, вместе с хребтовой костью, прошла область дисковых ножей 18, 19, чувствительные элементы 20, 27 и, соответственно, ножевые головки 16, 17 перемещают обратно в их исходное начальное положение.
Особенно предпочтительно, способ осуществляют с использованием режущего устройства 10 согласно одному или более пп. 1-11 формулы изобретения.



Изобретение относится к режущему устройству (10), предназначенному и выполненному с возможностью окончательного отделения рыбного филе от рыбы, транспортируемой хвостом вперед в транспортном направлении Т по транспортному пути и уже имеющей разрезы по брюшной и боковой частям. Устройство содержит раму (11), транспортное средство (13), приводимое во вращение приводным элементом (12) и содержащее по меньшей мере один приемный элемент (14) для обрабатываемой рыбы, и узел (15) режущих ножей, содержащий две ножевые головки (16, 17), каждая из которых содержит приводной дисковой нож (18, 19). Указанные две ножевые головки (16, 17) расположены на противоположных сторонах транспортного пути так, что обрабатываемая рыба может перемещаться по транспортному пути между отстоящими друг от друга дисковыми ножами (18, 19). Для изменения расстояния (В) между дисковыми ножами (18, 19) ножевые головки (16, 17) подвижно установлены на раме (11), а узел (15) содержит по меньшей мере один чувствительный элемент (20, 27), который закреплен на одной из подвижных ножевых головок (16, 17). Каждый чувствительный элемент (20, 27) расположен на ножевой головке (16, 17) за режущими кромками (SK) дисковых ножей (18, 19), если смотреть в транспортном направлении Т. Режущие кромки направлены против транспортного направления Т, и чувствительный элемент выступает за соответствующую режущую кромку (SK), если смотреть в направлении, поперечном транспортному направлению Т, в направлении центральной оси (М) транспортного средства (13) и, соответственно, обрабатываемой рыбы. Изобретение также относится к соответствующему способу. Изобретение обеспечивает окончательное отделение рыбного филе от хребтовой кости с максимальным выходом продукта без риска надрезов хребтовой кости. 2 н. и 13 з.п. ф-лы, 5 ил.
1. Режущее устройство (10), предназначенное и выполненное с возможностью окончательного отделения рыбного филе от рыбы, транспортируемой хвостом вперед в транспортном направлении Т по транспортному пути и уже разрезанной в брюшной и боковой частях, причем устройство содержит раму (11), транспортное средство (13), которое выполнено с возможностью приведения во вращение посредством приводного элемента (12) и содержит по меньшей мере один приемный элемент (14) для обрабатываемой рыбы, и узел (15) режущих ножей, содержащий две ножевые головки (16, 17), каждая из которых содержит приводной дисковой нож (18, 19), причем указанные две ножевые головки (16, 17) расположены на противоположных сторонах транспортного пути так, что обеспечена возможность транспортировки обрабатываемой рыбы по транспортному пути между отстоящими друг от друга дисковыми ножами (18, 19), при этом режущее устройство отличается тем, что для изменения расстояния (В) между дисковыми ножами (18, 19) ножевые головки (16, 17) подвижно установлены на раме (11), и тем, что узел (15) режущих ножей содержит по меньшей мере один чувствительный элемент (20, 27), который прикреплен к одной из подвижных ножевых головок (16, 17), при этом каждый чувствительный элемент (20, 27) расположен на ножевой головке (16, 17) за режущими кромками (SK) дисковых ножей (18, 19), если смотреть в транспортном направлении Т, причем указанные режущие кромки направлены против транспортного направления Т, и выступает за соответствующую режущую кромку (SK), если смотреть в направлении, поперечном транспортному направлению Т, в направлении центральной оси (М) транспортного средства (13) и, таким образом, обрабатываемой рыбы.
2. Режущее устройство (10) по п. 1, отличающееся тем, что указанные две ножевые головки (16, 17) выполнены с возможностью управления по отдельности друг от друга, причем каждая ножевая головка (16, 17) оснащена своим чувствительным элементом (20, 27), при этом указанные два чувствительных элемента (20, 27) размещены на расстоянии друг от друга на противоположных сторонах транспортного пути.
3. Режущее устройство (10) по п. 2, отличающееся тем, что расстояние чувствительных элементов (20, 27) друг от друга поперечно транспортному направлению Т меньше, чем расстояние режущих кромок (SK) дисковых ножей (18, 19) друг от друга поперечно транспортному направлению Т.
4. Режущее устройство (10) по одному или более из пп. 1-3, отличающееся тем, что каждая из указанных двух ножевых головок (16, 17) расположена на свободном конце (28, 29) опорного плеча (30, 31), причем опорные плечи (30, 31) имеют общую ось (S) поворота над транспортным средством (13), которая проходит в транспортном направлении Т и находится на центральной оси (М) транспортного средства (13) или над указанной осью и, соответственно, обрабатываемой рыбой.
5. Режущее устройство (10) по одному или более из пп. 1-4, отличающееся тем, что указанные две ножевые головки (16, 17) установлены на раме (11) по отдельности с помощью опорных плеч (30, 31) с возможностью поворота вокруг оси (S) поворота, причем указанные два опорных плеча (30, 31) и, соответственно, ножевые головки (16, 17) предварительно напряжены с помощью пружинного элемента (32), противодействуя опоре (33, 34) в направлении центральной оси (М) транспортного средства (13) и, соответственно, обрабатываемой рыбы, так что дисковые ножи (18, 19) в исходном положении отстоят друг от друга на заданное минимальное расстояние (В1).
6. Режущее устройство (10) по п. 5, отличающееся тем, что опоры (33, 34) для опорных плеч (30, 31) выполнены с возможностью регулирования для обеспечения возможности регулирования минимального расстояния (B1) между дисковыми ножами.
7. Режущее устройство (10) по одному или более из пп. 1-6, отличающееся тем, что каждый чувствительный элемент (20, 27) выполнен с возможностью регулирования для обеспечения возможности регулирования расстояния от центральной оси (М) транспортного средства (13) и, соответственно, от обрабатываемой рыбы и ее хребтовой кости.
8. Режущее устройство (10) по одному или более из пп. 1-7, отличающееся тем, что расстояние между режущими кромками (SK) дисковых ножей (18, 19), которые направлены против транспортного направления Т, с одной стороны, и каждым чувствительным элементом (20, 27) в транспортном направлении Т, с другой стороны, составляет от 5 до 50 мм и предпочтительно от 10 до 30 мм.
9. Режущее устройство (10) по одному или более из пп. 1-8, отличающееся тем, что каждая ножевая головка (16, 17) оснащена отклоняющим элементом (35, 36), который содержит первую отклоняющую часть (37, 38), расположенную на внутренней стороне дисковых ножей (18, 19) и направленную к центральной оси (М) транспортного средства (13) и, соответственно, обрабатываемой рыбы, и вторую отклоняющую часть (39, 40), которая проходит с изгибом в сторону от указанной первой отклоняющей части (37, 38), в сторону от центральной оси (М) транспортного средства (13) и, соответственно, от обрабатываемой рыбы.
10. Режущее устройство (10) по п. 9, отличающееся тем, что каждый чувствительный элемент (20, 27) выполнен в виде единого целого с отклоняющим элементом (35, 36).
11. Режущее устройство (10) по одному или более из пп. 1-10, отличающееся тем, что ножевые головки (16, 17) и/или дисковые ножи (18, 19) выполнены, с одной стороны, с возможностью поворота и/или регулирования вокруг осей, проходящих в транспортном направлении Т, и, с другой стороны, с возможностью поворота и/или регулирования вокруг осей, проходящих вертикально относительно транспортной плоскости (Е).
12. Способ окончательного отделения рыбного филе от рыбы, которую транспортируют хвостом вперед в транспортном направлении Т по транспортному пути и которая уже разрезана по брюшной и боковой частям, причем способ включает этапы:
- транспортирования обрабатываемой рыбы хвостом вперед в транспортном направлении Т по транспортному пути с помощью транспортного средства (13),
- срезания рыбного филе параллельно хребтовой кости обрабатываемой рыбы с помощью узла (15) режущих ножей, причем обрабатываемую рыбу транспортируют хвостом вперед и спиной вверх к узлу (15) режущих ножей между двумя дисковыми ножами (18, 19) указанного узла (15), которые размещены на расстоянии друг от друга,
отличающийся тем, что дисковыми ножами (18, 19) управляют относительно их расстояния друг от друга с помощью по меньшей мере одного чувствительного элемента (20, 27), который направляют в транспортном направлении Т за режущими кромками (SK) дисковых ножей (18, 19), которые направлены против транспортного направления Т, в боковом направлении вдоль хребтовой кости рыбы, которая открывается при разрезании.
13. Способ по п. 12, отличающийся тем, что дисковые ножи (18, 19), в зависимости от перемещения чувствительных элементов (20, 27), перемещают по отдельности, поперечно транспортному направлению Т, в сторону от хребтовой кости и в направлении к ней с помощью механического соединения между чувствительным элементом (20, 27) и ножевыми головками (16, 17), содержащими дисковые ножи (18, 19).
14. Способ по п. 12 или 13, отличающийся тем, что ширину хребтовой кости сканируют каждым чувствительным элементом (20, 27) на участке хребтовой кости, который уже прошел дисковые ножи (18, 19).
15. Способ по одному или более из пп. 12-14, отличающийся тем, что его осуществляют с помощью режущего устройства (10), выполненного по одному или более из пп. 1-11.
| Тензорезистор | 1973 |
|
SU491027A1 |
| US 20130040544 A1, 14.02.2013 | |||
| Пресс-форма для формования изделий из порошков и волокон | 1984 |
|
SU1196136A1 |
| Насосный агрегат | 1989 |
|
SU1679061A1 |
| US 5413524 A1, 09.05.1995 | |||
| RU 2075158 C1, 10.03.1997. | |||

