Изобретение относится к измерительной головке, выполненной и предназначенной для определения длины брюшной полости обезглавленной и выпотрошенной после забоя рыбы, перемещаемой головным концом вперед в направлении Т перемещения, причем измерительная головка содержит по меньшей мере один измерительный датчик и по меньшей мере один датчик, который может быть активирован измерительным датчиком и который соединен с управляющим устройством, выполненным и предназначенным для приема и обработки входящих измерительных сигналов.
Изобретение также относится к рабочей станции, выполненной и предназначенной для обработки обезглавленной и выпотрошенной после забоя рыбы, причем рабочая станция содержит ножевой узел, содержащий две режущие головки, каждая из которых содержит дисковый нож, который может быть приведен во вращательное движение, и приводной блок для приведения дискового ножа во вращательное движение, при этом указанные два дисковых ножа ориентированы с V-образным наклоном относительно друг друга и наклонены друг к другу в направлении, противоположном направлению Т перемещения обрабатываемой рыбы, при этом рабочая станция также содержит измерительную головку для определения длины брюшной полости обезглавленной и выпотрошенной после забоя рыбы.
Изобретение также относится к установке для обработки, в частности филетирования, обезглавленной и выпотрошенной после забоя рыбы, которая содержит транспортирующее устройство для удерживания и перемещения рыбы головным концом вперед в направлении Т перемещения вдоль маршрута транспортировки и по меньшей мере одну рабочую станцию, расположенную вдоль маршрута транспортировки для обработки рыбы.
Кроме того, изобретение относится к способу обработки, в частности филетирования, обезглавленной и выпотрошенной после забоя рыбы, включающему следующие этапы: продвижение рыбы головным концом вперед в направлении Т перемещения к по меньшей мере двум рабочим станциям для обработки рыбы при помощи транспортирующего устройства, выполнение технологических разрезов по обрабатываемой рыбе с помощью ножевых узлов в виде рабочих станций путем последовательного перемещения обрабатываемой рыбы вдоль двух дисковых ножей ножевого узла, приводимых во вращательное движение, причем сначала выполняют разрез по брюшку с использованием первого ножевого узла, а затем выполняют по меньшей мере один разрез по боковым частям с использованием второго ножевого узла, расположенного после первого ножевого узла в направлении Т перемещения, при этом по меньшей мере ножевым узлом, предназначенным для выполнения разрезов по боковым частям, управляют на основании результатов измерения, касающихся размера рыбы и полученных с помощью измерительной головки.
Измерительные головки, рабочие станции и установки данного типа применяются в отрасли переработки продукции животного происхождения, в частности для филетирования рыбы, для получения рыбного филе как можно более точным и высокопродуктивным способом. При филетировании обезглавленной и выпотрошенной после забоя рыбы необходимо выполнить множество различных разрезов, чтобы полностью отделить мякоть и, в частности, филе от рыбного скелета с обеспечением высокого качества, т.е., в частности, с обеспечением полного отсутствия костей или их фрагментов. Для этого сначала, рыбу перемещают головным концом вперед вдоль маршрута транспортировки в направлении Т перемещения при помощи транспортирующего устройства. Вдоль данного маршрута транспортировки расположены по меньшей мере две рабочие станции. Предпочтительно в направлении Т перемещения расположены одна за другой более двух рабочих станций для выполнения различных рабочих этапов, а именно различных филетирующих разрезов. Помимо разрезов по брюшку и боковым частям, к указанным филетирующим разрезам также предпочтительно относятся, например, разрезы по реберным костям, спинному хребту, межмышечным костям или разрезы для получения брюшного лоскута, разделительные и другие разрезы.
Каждая из отдельных рабочих станций содержит ножевой узел, каждый из которых содержит пару разделительных ножей. Каждый разделительный нож из пары ножей выполнен в виде дискового ножа, например, для выполнения разрезов по брюшку и боковым частям. Дисковые ножи могут быть выполнены в виде неподвижно закрепленных дисковых ножей, расположенных вдоль маршрута транспортировки, например, в случае разрезания брюшка. В этом случае указанные два дисковых ножа отрезают нижние лучевые кости от края брюшной полости, то есть от местоположения непосредственно за реберными костями, до основания хвоста рыбы. Однако дисковые ножи и/или ножевые узлы, содержащие дисковые ножи, также могут быть выполнены подвижными и регулируемыми, то есть управляемыми с точки зрения их положения и/или ориентации, для их перемещения вдоль оптимизированной линии реза при выполнении каждого филетирующего разреза, а именно разрезов по боковым частям и разрезов по межмышечным костям или разрезов для получения брюшного лоскута. Для обеспечения возможности точного управления данными дисковыми ножами и/или ножевыми узлами, то есть для определения, например применительно к разрезам по боковым частям, времени начала взаимодействия дисковых ножей с рыбой и конечного момента извлечения ножей из рыбы в конце брюшной полости, важно знать размер каждой рыбы, находящейся в рабочей станции. То же самое относится и к другим филетирующим разрезам и, в частности, также к разрезу по межмышечным костям или разрезу для получения брюшного лоскута, чтобы при перемещении дисковых ножей или ножевых узлов можно было прокладывать линию реза точно по линии межмышечных костей, так чтобы все они остались в отделенных брюшных лоскутах.
Размер рыбы можно определить или установить различными способами.
В одном из вариантов измеряют толщину головы с использованием соответствующих измерительных головок, чтобы, исходя из этого, определить размер рыбы или длину брюшной полости, а также прохождение линии межмышечных костей. Однако данное измерение является неточным и поэтому не подходит для управления ножевыми узлами. В других вариантах измеряют или определяют длину брюшной полости. В конечном счете, длина брюшной полости позволяет сделать выводы о размере рыбы, протяженности скелета и т.д., а эти знания важны для оптимального управления дисковыми ножами или ножевыми узлами, в которых установлены дисковые ножи. Однако современные измерительные головки и измерительные средства лишь в ограниченной степени пригодны для точного определения длины брюшной полости и, следовательно, размера рыбы и протяженности скелета. Соответственно, управление является неточным, что приводит к потерям продукции на выходе при филетировании и к снижению качества получаемого филе, например, из-за наличия в филе фрагментов костей. Оптические датчики для измерения длины брюшной полости неизбежно создают проблемы, поскольку наличие отходов внутри брюшной полости искажает результат измерения. Следовательно, часто используются механические зонды (для измерения брюшной полости), или так называемые датчики высоты, но они не позволяют достаточно точно определить продольное положение, продольную протяженность и размер рыбы, что приводит к неправильным результатам разделки и связанными с этим потерями продукции на выходе.
Таким образом, целью изобретения является создание компактной и динамичной измерительной головки, которая обеспечивает надежное и точное измерение длины брюшной полости. Целью изобретения также является создание соответствующей рабочей станции, соответствующей установки и соответствующего способа филетирования обезглавленной и выпотрошенной после забоя рыбы.
Данная цель достигается путем создания измерительной головки вышеописанного типа благодаря тому, что измерительная головка по меньшей мере частично выполнена и предназначена для размещения между двумя дисковыми ножами ножевого узла для филетирования рыбы таким образом, что указанный или каждый измерительный датчик может быть функционально соединен с реберной костью, которая находится ближе всего к анальному отверстию рыбы. Последняя перед анальным отверстием рыбы реберная кость дает указание точного положения для определения длины брюшной полости и управления, исходя из этого, дисковыми ножами или ножевыми узлами, в которых установлены дисковые ножи. В результате транспортировки рыбы измерительные датчики, расположенные в брюшной полости, которая сужается по направлению к анальному отверстию, захватываются последней реберной костью, которая определяет конец брюшной полости, и тем самым активируют измерительный сигнал, который затем может быть использован для управления ножевыми узлами. Выполнение измерительной головки согласно изобретению таким образом, что она может быть по меньшей мере частично расположена между двумя дисковыми ножами, обеспечивает очень компактную конструкцию, а также гарантирует, что указанный или каждый измерительный датчик может быть направлен внутри брюшной полости вплотную вдоль позвоночника, на котором расположены реберные кости.
Предпочтительно измерительная головка содержит базовую часть, которая может быть неподвижным образом прикреплена к раме машины, при этом на базовой части расположен с возможностью поворота по меньшей мере один измерительный датчик. Неподвижное прикрепление к раме машины предусматривает прикрепление, предпочтительно с возможностью отсоединения, к раме, опоре или подобному элементу и, в комбинации с установкой каждого измерительного датчика на базовой части с возможностью его поворота, обеспечивает возможность приложения достаточно большого усилия зондирования для того, чтобы, например, уменьшить влияние сталкивающихся друг с другом частей во время измерения. Поскольку измерительная головка согласно изобретению расположена на базовой части, она также может использоваться, в частности, в качестве модуля, устанавливаемого при модернизации на существующих машинах.
Целесообразно, чтобы базовая часть была выполнена в виде крановой балки и содержала крепежное плечо и опорное плечо, на котором с возможностью поворота установлен указанный или каждый измерительный датчик. Базовая часть может иметь любую форму и может быть выполнена, например, в виде кронштейна, опоры или т.п. Выполнение в виде крановой балки, с одной стороны, упрощает установку измерительной головки или по меньшей мере ее частей между двумя дисковыми ножами ножевого узла, а с другой стороны, обеспечивает беспрепятственное введение указанного или каждого измерительного датчика в брюшную полость, а также направленное перемещение внутри брюшной полости таким образом, чтобы гарантировать надежный захват указанного или каждого измерительного датчика последней реберной костью, движущейся в направлении Т перемещения.
Особенно преимущественный вариант выполнения отличается тем, что измерительная головка содержит два измерительных датчика, которые расположены на расстоянии друг от друга на противоположных сторонах опорного плеча. Наличие двух измерительных датчиков, работающих с обеих сторон спинного хребта, увеличивает вероятность того, что по меньшей мере одна из двух последних реберных костей, расположенных по обе стороны спинного хребта перед анальным отверстием, захватит один из двух измерительных датчиков и инициирует подачу измерительного сигнала. Для этого измерительные датчики могут быть выполнены с возможностью поворота вокруг общей поворотной оси. Два измерительных датчика также могут быть закреплены на соединительном вале, установленном с возможностью вращения в базовой части. В этих случаях отклонение измерительного датчика неизбежно приводит к отклонению/захватыванию второго измерительного датчика. Измерительные датчики также могут быть установлены на опорном плече по отдельности, предпочтительно при помощи соединительного стержня или на таком стержне, установленном в опорном плече.
В особенно предпочтительном решении указанный или каждый измерительный датчик изготовлен из тонкого, гибкого листа пружинной стали. Это дает возможность получения измерительного датчика с оптимизированной массой, который имеет высокие динамические характеристики для быстрых циклов измерений (перемещения из положения ожидания в положение измерения и обратно). Выражение «тонкий» применительно к толщине материала означает толщину материала листов пружинной стали, составляющую предпочтительно менее 1 мм и особенно предпочтительно менее 0,5 мм. Предпочтительно, чтобы каждый лист пружинной стали, образующий измерительный датчик, не был цельным по всей своей поверхности, а имел вырезы для того, чтобы использовать меньшее количество материала и, таким образом, уменьшить вес. Благодаря конфигурации согласно изобретению измерительные датчики являются упруго деформируемыми, что дает им возможность приспосабливаться, в частности, к внутренним поверхностям дисковых ножей ножевого узла, которые обращены друг к другу. Наряду с поворотом измерительных датчиков в качестве первой величины перемещения вокруг оси поворота или вместе с валом, упругая конфигурация обеспечивает вторую величину перемещения для измерительных датчиков или их частей. В целом обеспечен более легкий измерительный датчик, обладающий меньшей инерцией, в результате чего может быть достигнут быстрый возврат для выполнения коротких циклов измерения, как указано выше. В течение цикла измерения зондирующий наконечник каждого измерительного датчика дважды проходит через зону резания или режущие кромки дисковых ножей в точке, в которой расстояние между двумя дисковыми ножами ножевого узла является минимальным.
Целесообразно, чтобы два измерительных датчика, расположенных на расстоянии друг от друга и установленных с возможностью поворота на опорном плече, были взаимно соединены поперечной стяжкой по меньшей мере в одной точке. Такое непосредственное соединение, выполненное в дополнение к имеющемуся опосредованному соединению при помощи поворотной оси или вала, обеспечивает устойчивость для обеспечения, например, возможности приложения большего усилия при зондировании, и улучшает синхронизированный поворот двух легких и, следовательно, динамически оптимизированных измерительных датчиков.
Предпочтительно первая поперечная стяжка выполнена перед осью поворота измерительных датчиков в направлении Т перемещения обрабатываемой рыбы, при этом поперечная стяжка образована болтом, который разъемным образом прикреплен к обоим измерительным датчикам и ориентирован поперек направления Т перемещения. Соединение двух измерительных датчиков также может быть выполнено с помощью винтов, распорок или любых других подходящих соединительных или крепежных средств.
Предпочтительно после оси поворота измерительных датчиков в направлении Т перемещения обрабатываемой рыбы выполнена вторая поперечная стяжка, образованная болтом, который разъемным образом прикреплен к обоим измерительным датчикам и ориентирован поперек направления Т перемещения. Соединение двух измерительных датчиков также может быть выполнено с помощью винтов, распорок или любых других подходящих соединительных или крепежных средств. Две поперечные стяжки не только обеспечивают устойчивость измерительной головки, что требуется для приложения достаточно большого усилия при зондировании, но также гарантируют, что два измерительных датчика находятся на определенном расстоянии друг от друга и остаются на данном расстоянии даже при повороте измерительной головки из положения ожидания в положение измерения и обратно.
Предпочтительно вторая поперечная стяжка взаимодействует с ограничительным элементом, расположенным на базовой части. Например, ограничительный элемент представляет собой регулируемый болт, с помощью которого длина диапазона поворота измерительных датчиков может быть ограничена до положения измерения, чтобы обеспечить соответствующую длину для каждого конкретного случая.
В предпочтительном варианте выполнения каждый измерительный датчик содержит основную часть, имеющую зондирующий наконечник. Когда измерительные датчики находятся в положении ожидания, зондирующий наконечник ориентирован в направлении, противоположном направлению Т перемещения, так что последняя реберная кость, расположенная перед анальным отверстием, точно и неизбежно сталкивается с зондирующим наконечником и, таким образом, поворачивает измерительный датчик из положения ожидания в положение измерения.
Предпочтительно, в дополнение к зондирующему наконечнику, основная часть имеет чувствительный выступ, который может быть функционально соединен с датчиком. Основная часть, чувствительный выступ и зондирующий наконечник каждого измерительного датчика предпочтительно выполнены за одно целое. Однако также имеется возможность сборки каждого измерительного датчика из отдельных частей. В качестве примера датчик может представлять собой простой фотоэлектрический датчик, используемый в качестве пускового устройства. Датчик также может быть выполнен в виде датчика расстояния. Возможны и другие конфигурации датчика. Кроме того, существует возможность использования набора датчиков или других средств обнаружения.
Предпочтительно датчик расположен на базовой части. Особенно предпочтительно, чтобы датчик был расположен непосредственно или опосредованно на крепежном плече базовой части. Указанный или каждый датчик, который прикреплен к крепежному плечу предпочтительно разъемным образом, может быть расположен непосредственно на крепежном плече. Также возможно регулируемое крепление непосредственно к крепежному плечу, например, с возможностью регулировки в пазу и т.п. Указанный или каждый датчик также может быть прикреплен к крепежному плечу опосредованным образом, например, с помощью регулировочной пластины, которая предпочтительно расположена на крепежном плече с возможностью регулировки. Однако указанный или каждый датчик может быть расположен и в другом месте базовой части или может быть установлен отдельно от нее.
Особенно предпочтительное решение отличается тем, что указанный или каждый измерительный датчик удерживается в положении ожидания подпружиненным образом, при этом между указанным или каждым измерительным датчиком и базовой частью натянут пружинный элемент. Пружинный элемент или, как вариант, также два или более пружинных элемента способствуют приложению достаточно большого усилия при зондировании.
Предпочтительно указанный или каждый измерительный датчик выполнен и установлен с возможностью отклонения в положение измерения с преодолением упругого усилия пружинного элемента. В положении измерения указанный или каждый измерительный датчик подает измерительный сигнал. Положение измерения ограничено и задано с помощью предпочтительно регулируемого ограничительного элемента. Указанный или каждый пружинный элемент обеспечивает быстрое возвращение измерительных датчиков в положение ожидания после того, как указанные датчики были отклонены рыбой в положение измерения, а затем снова освобождены в результате дальнейшего продвижения рыбы. Таким образом, можно получить короткие циклы измерения, обеспечивающие эффективное выполнение замера рыб, подаваемых одна за другой к измерительной головке. Усилие пружины, с помощью которого измерительные датчики удерживаются в положении ожидания, делает их еще более чувствительными, что позволяет получать более точные результаты измерений.
Целесообразно, чтобы чувствительный выступ по меньшей мере частично закрывал датчик в положении измерения. Указанный или каждый датчик может быть активирован, в частности оптическим и/или электронным способом, в положении измерения, которое находится за пределами брюшной полости измеряемой рыбы.
Предпочтительно пружинный элемент натянут между первой поперечной связью и опорным плечом базовой части. Таким образом, в дополнение к компактной конструкции, для обоих измерительных датчиков обеспечено синхронное поворотное перемещение из положения измерения обратно в положение ожидания. Указанный или каждый пружинный элемент также может быть расположен в различных положениях, непосредственно на измерительном датчике с одной стороны, и на базовой части с другой стороны.
Особенно предпочтительный вариант выполнения измерительной головки отличается тем, что указанный или каждый измерительный датчик выполнен и установлен с обеспечением контакта с внутренней поверхностью дискового ножа. Данная конфигурация, в частности форма измерительных датчиков и подпружинивание тонких листов пружинной стали, применяемой в качестве измерительных датчиков, которые могут быть натянуты между дисковыми ножами, обеспечивает компактное размещение указанных датчиков между обращенными друг к другу внутренними поверхностями дисковых ножей для выполнения разреза по брюшку, а также контакт датчиков с указанными поверхностями.
Указанная цель также достигается с помощью рабочей станции, которая обладает вышеуказанными признаками, благодаря тому, что измерительная головка выполнена и установлена в соответствии с одним или более из п.п. 1-18 формулы изобретения. Полученные в результате преимущества описаны выше применительно к измерительной головке, поэтому во избежание повторений сделана ссылка на приведенные выше положения. Дисковые ножи расположены в V-образной конфигурации по отношению друг к другу. Кроме того, дисковые ножи ориентированы навстречу друг другу в направлении, противоположном направлению Т перемещения. В результате расстояние между дисковыми ножами на входящей стороне меньше, чем расстояние между указанными ножами на выходящей стороне, так что точка, в которой расстояние между режущими кромками дисковых ножей является минимальным, расположена в направлении Т перемещения после оси вращения дисковых ножей. Расстояние все больше увеличивается после прохождения оси вращения дисковых ножей в направлении Т перемещения.
Предпочтительно в каждом положении измерительные датчики измерительной головки находятся в тесном контакте с обращенными друг к другу внутренними поверхностями дисковых ножей по меньшей мере частично, а именно контактируют с ними по меньшей мере своим зондирующим наконечником. Поскольку измерительные датчики находятся в тесном контакте с внутренними поверхностями дисковых ножей при небольшом давлении, в любом положении расстояние между измерительными датчиками по существу совпадает с расстоянием между дисковыми ножами.
Предпочтительный вариант выполнения отличается тем, что в положении ожидания измерительные датчики своими зондирующими наконечниками ориентированы в направлении, противоположном направлению Т перемещения и, с одной стороны, выступают за режущие кромки дисковых ножей, а с другой стороны, расположены в направлении Т перемещения до точки, в которой расстояние между дисковыми ножами является минимальным. Зондирующие наконечники измерительных датчиков могут поворачиваться в пределах диапазона поворота из положения ожидания, в котором указанные наконечники ориентированы в направлении, противоположном направлению Т перемещения, выступают за режущие кромки дисковых ножей и расположены в направлении Т перемещения до оси вращения дисковых ножей, а также на еще большем расстоянии до точки, в которой расстояние между дисковыми ножами является минимальным, в положение измерения, в котором чувствительные выступы приводят в действие датчик, а зондирующие наконечники расположены в мертвой зоне резания дисковых ножей, образуемой при резке. «Мертвая зона резания» охватывает область, в которой зондирующие наконечники расположены под режущими кромками дисковых ножей и после оси вращения дисковых ножей в направлении Т перемещения, то есть в зоне, в которой расстояние между дисковыми ножами больше, чем в зоне, где расстояние между дисковыми ножами является минимальным. Поскольку в любом положении измерительные датчики находятся в контакте с обращенными друг к другу внутренними поверхностями дисковых ножей по меньшей мере частично, то есть по меньшей мере всегда контактируют с ними своими зондирующими наконечниками, то, с одной стороны, обеспечено надежное захватывание измерительных датчиков реберными костями в положении ожидания, а с другой стороны, в положении измерения рыба может быть освобождена безо каких-либо соударений. Таким образом, измерительные датчики контактируют с обращенными друг к другу внутренними поверхностями дисковых ножей по меньшей мере своими зондирующими наконечниками в положении ожидания, в положении измерения, а также при повороте из одного положения в другое. Во время поворота измерительные датчики перемещаются так, что при этом их зондирующие наконечники расположены, с одной стороны, в направлении ориентации рыбы при транспортировке, то есть в направлении перемещения, и в направлении, противоположном направлению Т перемещения. Однако при повороте измерительные датчики, по меньшей мере своими зондирующими наконечниками, также перемещаются поперек направления Т перемещения. В положении ожидания расстояние между измерительными датчиками приблизительно равно расстоянию Е между дисковыми ножами. Указанное расстояние уменьшается в направлении Т перемещения от наименьшего расстояния в точке Р до расстояния S, при котором дисковые ножи взаимодействуют с рыбой, а затем увеличивается в направлении Т перемещения до расстояния А, когда измерительные датчики находятся в положении измерения, при этом А больше Е. Плотный контакт означает, что каждый измерительный датчик находится в контакте с дисковыми ножами в изогнутом состоянии, повторяя контур ножа, а именно при небольшом (пружинящем) давлении, в частности, даже при перемещении из положения ожидания в положение измерения, поскольку измерительные датчики являются гибкими и податливыми.
В особенно преимущественном варианте ножевой узел выполнен и установлен с возможностью выполнения разреза по брюшку обезглавленной и выпотрошенной после забоя рыбы, транспортируемой головным концом вперед в направлении Т перемещения. Другими словами, измерительная головка и ножевой узел, предназначенный для выполнения разреза по брюшку, образуют блок. Поскольку измерительная головка связана с ножевым узлом для выполнения разреза по брюшку, длину брюшной полости можно установить в самый ближайший момент, когда рыба еще находится в устойчивом состоянии. До или во время выполнения разреза по брюшку рыба либо все еще остается не разрезанной в продольном направлении относительно брюшной полости, то есть имеет цельную кожу брюшка, либо, в частности в случае более крупной рыбы, она вскрыта, то есть по коже брюшка выполнен разрез. Однако в данном случае по меньшей мере реберные кости по-прежнему жестко соединены со спинным хребтом, что придает рыбе необходимую устойчивость. Комбинация ножевого узла для выполнения разрезов по брюшку с измерительной головкой, то есть расположение измерительной головки между дисковыми ножами для выполнения разрезов по брюшку, гарантирует проведения измерения на устойчивом теле рыбы; это также означает, что при зондировании может быть приложено большее усилие, а это, в свою очередь, означает, что можно значительно снизить воздействие потенциально мешающих частей. Благодаря выполнению рабочей станции, в которой измерительная головка работает в зоне дисковых ножей, предназначенных для выполнения разрезов по брюшку, после подачи измерительного сигнала каждый измерительный датчик может выйти из рыбы через разрез брюшка, выполненный в процессе измерения или после него, не зацепляя брюшную полость и/или кожу брюшка. Это уменьшает задержку хода, то есть перемещения каждого измерительного датчика из положения ожидания в положение измерения и обратно, что приводит к повышению динамических характеристик измерительной головки.
Указанная цель также достигается с помощью установки, которая обладает вышеуказанными признаками, благодаря тому, что рабочая станция выполнена и установлена в соответствии с одним или более из п.п. 19-22 формулы изобретения. Полученные в результате преимущества описаны выше применительно к измерительной головке и рабочей станции, поэтому во избежание повторений сделана ссылка на приведенные выше положения.
Целесообразно, чтобы вдоль маршрута транспортировки было установлено несколько рабочих станций, которые в направлении Т перемещения расположены после рабочей станции, выполненной согласно одному или более из п.п. 19-22 формулы изобретения. Дополнительные рабочие станции представляют собой, в частности, ножевые узлы для выполнения разрезов по боковым частям, реберным костям, спинному хребту, межмышечным костям или разрезов для получения брюшного лоскута, а также разделительных разрезов.
Предпочтительно установка содержит блок управления, который выполнен и предназначен для управления рабочими станциями на основании результатов измерений, полученных измерительной головкой, выполненной в соответствии с одним или более из п.п. 1-18 формулы изобретения, при этом блок управления содержит по меньшей мере блок оценки данных и запоминающее устройство. Управляющее устройство измерительной головки может быть выполнено отдельно или может являться частью блока управления установки. Управление данными ножевыми узлами, выполняющими филетирующие разрезы в зависимости от размера рыбы, а именно ножевыми узлами для выполнения разрезов по боковым частям и по межмышечным костям или разрезов для получения брюшного лоскута, может осуществляться на основании результатов измерений, полученных измерительной головкой в зоне ножевого узла, предназначенного для выполнения разреза по брюшку, и прошедших оценку. В частности, управляющее устройство или блок управления выполнен(о) и предназначен(о) для управления моментом, когда дисковые ножи для выполнения разрезов по боковым частям входят во взаимодействие с рыбой в начале брюшной полости и отсоединяются от нее в конце брюшной полости, а также для управления моментом регулирования и режущей кривизной дисковых ножей для выполнения разрезов по межмышечным костям или разрезов для получения брюшного лоскута вдоль линии межмышечных костей.
Кроме того, указанная цель достигается с помощью способа, включающего вышеуказанные этапы, благодаря тому, что положение реберных костей, расположенных ближе всего к анальному отверстию рыбы, определяют с использованием измерительной головки, и на основании данного измерения рассчитывают размер рыбы для управления ножевым узлом, предназначенным для выполнения разрезов по боковым частям. На основании местоположения последних перед анальным отверстием реберных костей может быть получен чрезвычайно точный позиционный сигнал для определения длины брюшной полости и, следовательно, размера рыбы. Обладая такими знаниями, можно обеспечить чрезвычайно точное управление ножевыми узлами в целом и, в частности, ножевыми узлами для выполнения разрезов по боковым частям. Полученные в результате дополнительные преимущества описаны выше применительно к измерительной головке, рабочей станции и установке, поэтому во избежание повторений сделана ссылка на приведенные выше положения.
Предпочтительно результаты измерений получают до выполнения разреза по брюшку или во время указанного разреза. Определение результатов измерений на данном раннем этапе процесса филетирования является особенно точным, поскольку рыба все еще находится в очень устойчивом состоянии и, соответственно, возможно приложение больших усилий при зондировании, так что может быть уменьшено воздействие мешающих частей и т.п. Поскольку измерение производится до выполнения разреза по брюшку или во время него, измерительные датчики могут быть извлечены из рыбы без каких-либо соударений.
Предпочтительно в результате продвижения рыбы в направлении Т перемещения реберные кости, расположенные ближе всего к анальному отверстию по обе стороны спинного хребта, сталкиваются с измерительными датчиками, расположенными с обеих сторон хребта, и по мере дальнейшего продвижения рыбы отклоняют указанные датчики до тех пор, пока измерительные датчики не активируют датчик с помощью чувствительного выступа. Измерительные сигналы передаются на управляющее устройство или блок управления, с помощью которого сигналы обрабатываются и, как вариант, сохраняются в памяти. Затем управляющее устройство или блок управления обеспечивает управление указанным или каждым ножевым узлом, который выполняет филетирующие разрезы, зависящие от размера рыбы.
Особенно предпочтительно управление по меньшей мере ножевым узлом, предназначенным для выполнения разрезов по межмышечным костям или разрезов для получения брюшного лоскута, также осуществляется на основании результатов измерений, полученных с помощью измерительной головки. В результате с использованием дисковых ножей можно выполнять точные разрезы вдоль конкретной линии межмышечных костей.
Особенно предпочтительно способ осуществляют с использованием устройства, выполненного в соответствии с одним или более из п.п. 23-25 формулы изобретения.
Другие полезные и/или преимущественные признаки и усовершенствования измерительной головки, рабочей станции, установки и способа филетирования обезглавленной и выпотрошенной после забоя рыбы следуют из зависимых пунктов формулы изобретения и описания. Наиболее предпочтительные варианты выполнения измерительной головки, рабочей станции, установки и способа описаны более подробно со ссылкой на прилагаемые чертежи. На чертежах:
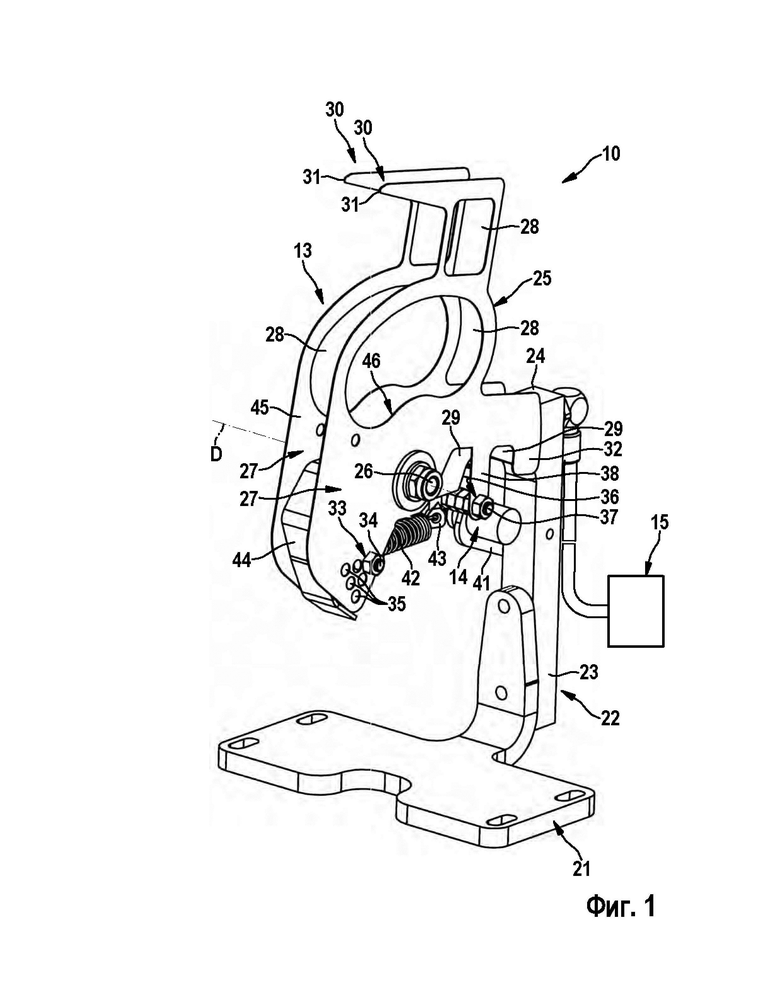
Фиг. 1 изображает схематический вид измерительной головки в аксонометрии под углом спереди,
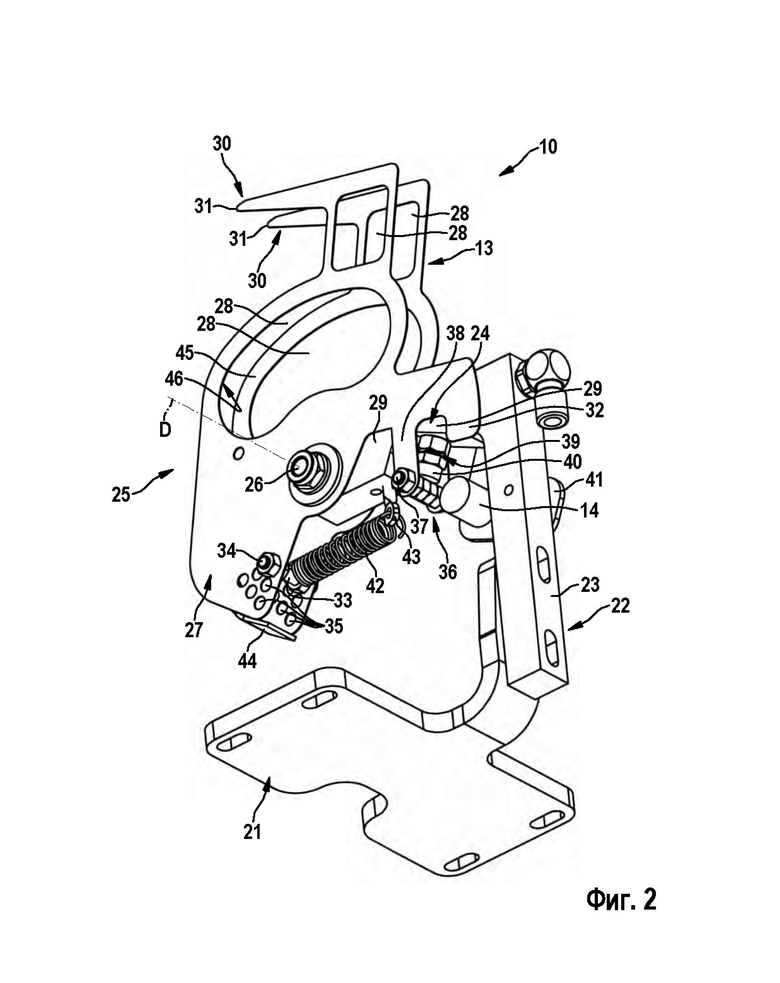
Фиг. 2 изображает вид измерительной головки, показанной на Фиг. 1, под углом снизу,
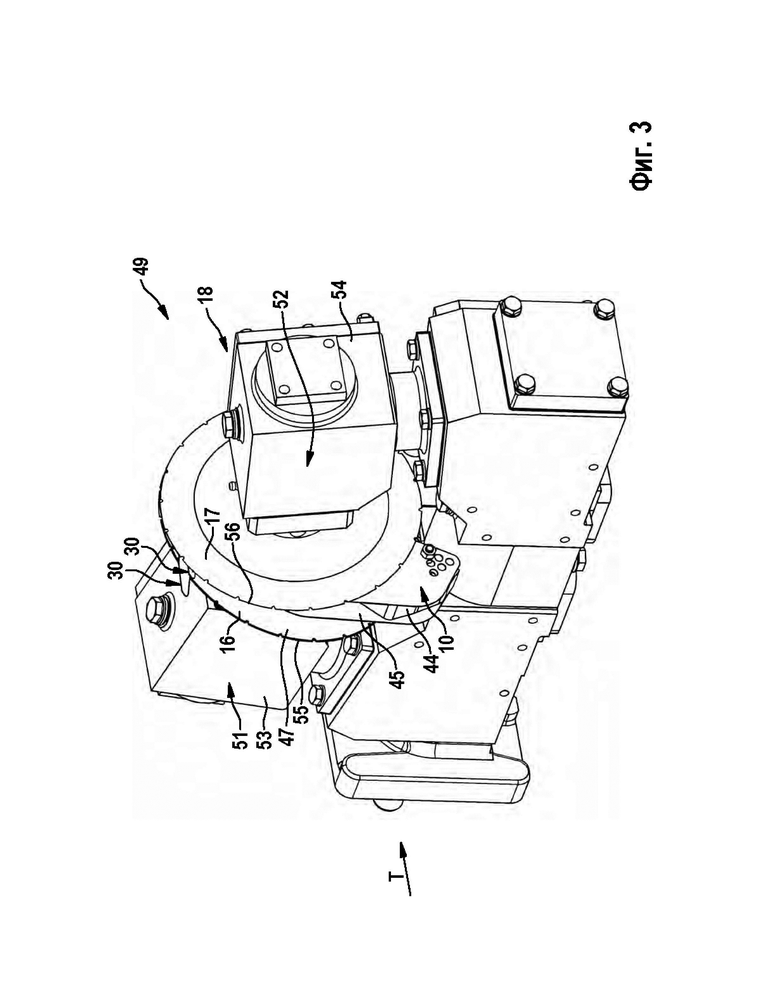
Фиг. 3 изображает схематический вид рабочей станции, содержащей ножевой узел и измерительную головку, под углом спереди,
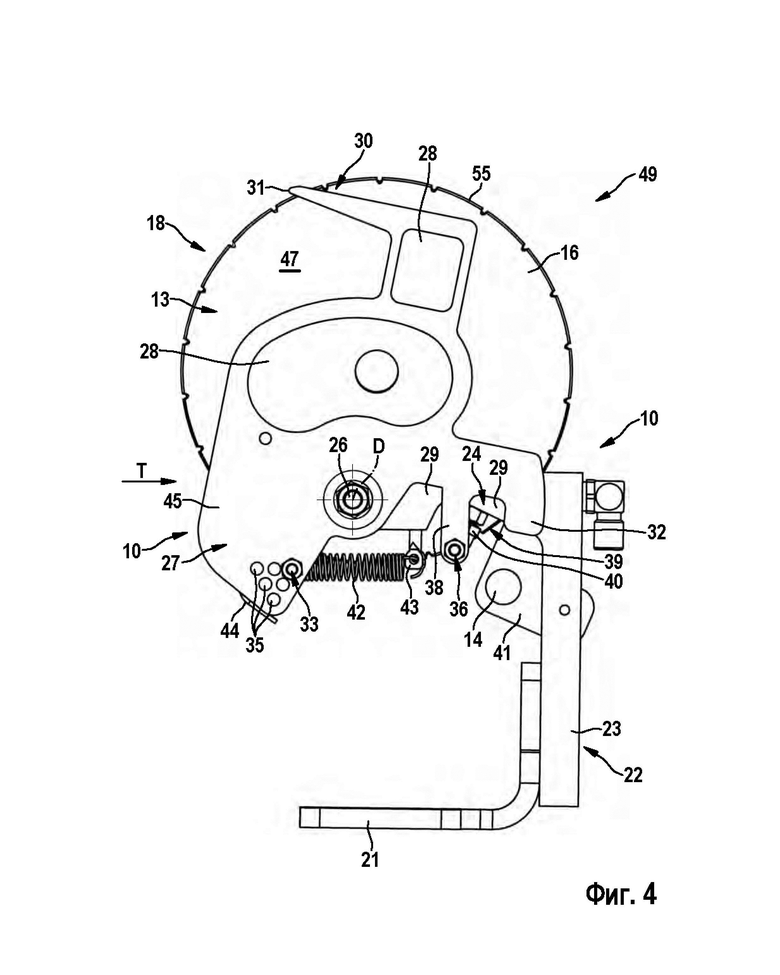
Фиг. 4 изображает вид сбоку рабочей станции, показанной на Фиг. 3, на котором измерительная головка показана в положении ожидания, при этом один дисковый нож ножевого узла не показан для ясности,
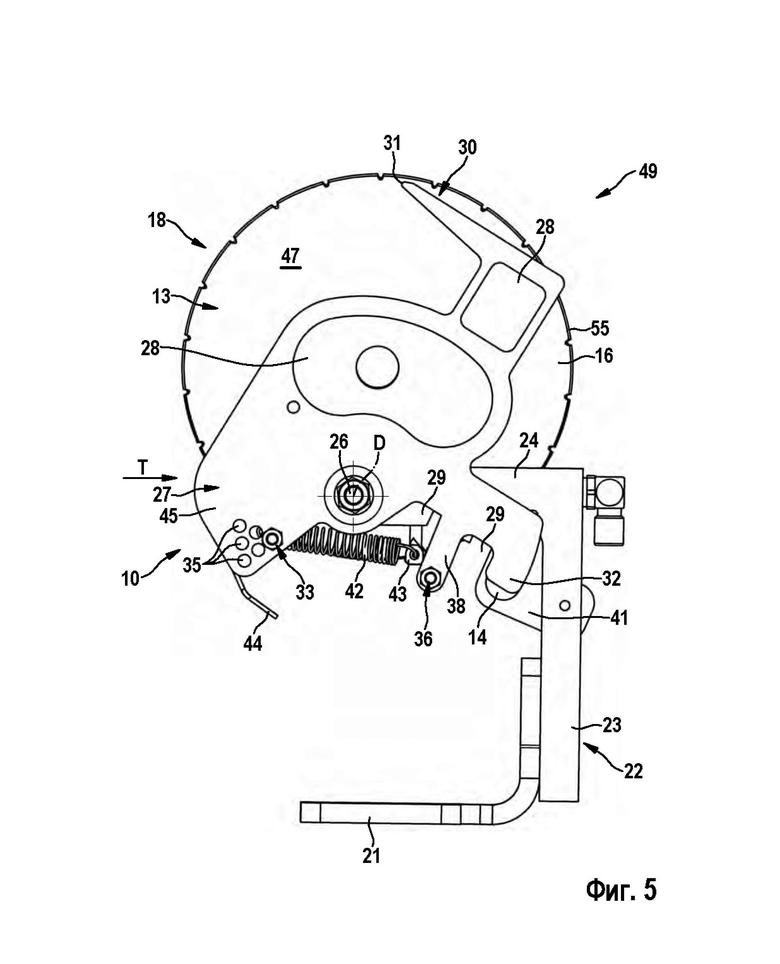
Фиг. 5 изображает вид сбоку рабочей станции, показанной на Фиг. 3, на котором измерительная головка показана в положении измерения, при этом один дисковый нож ножевого узла не показан для ясности,
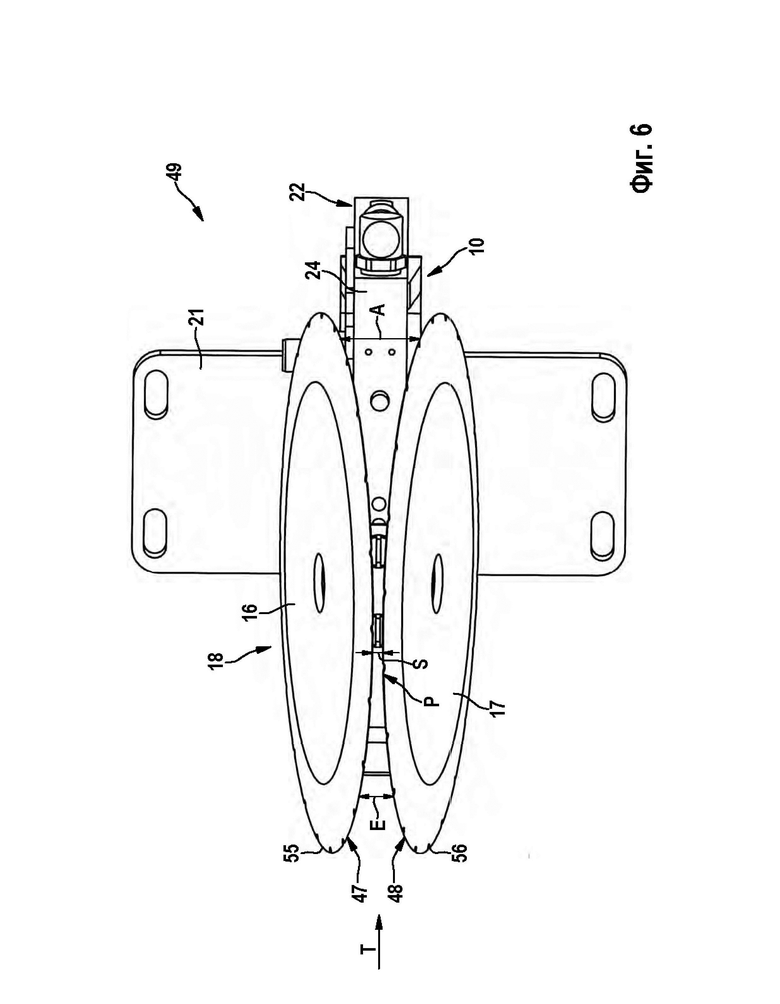
Фиг. 6 изображает вид сверху рабочей станции, показанной на Фиг. 3,
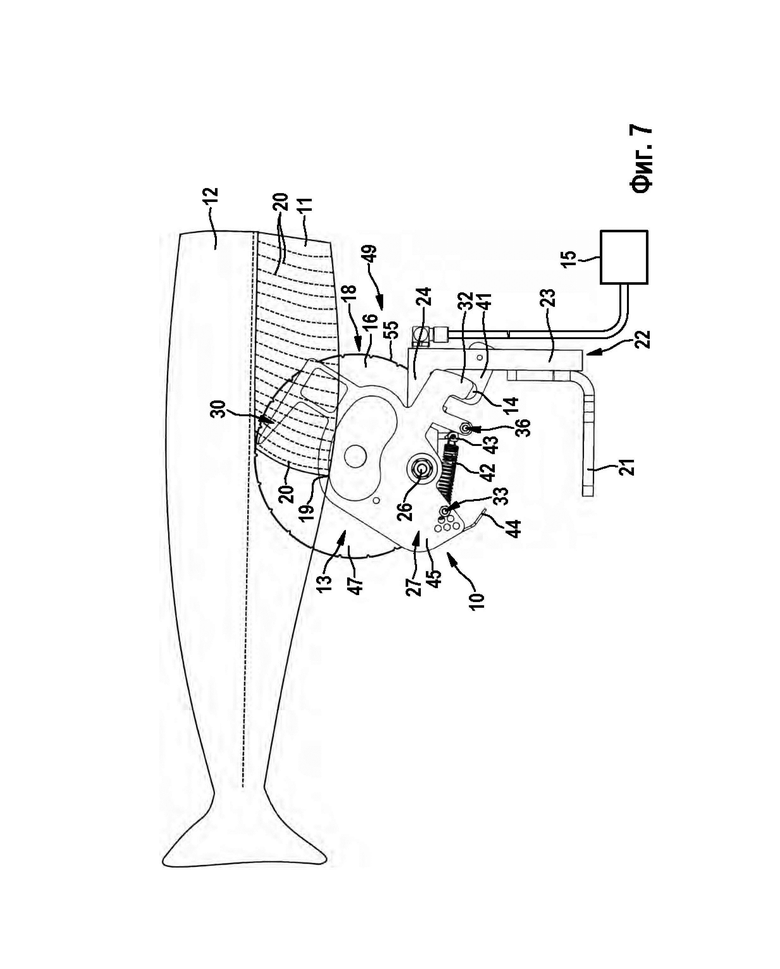
Фиг. 7 изображает рабочую станцию, показанную на Фиг. 5, во взаимодействии с рыбой, и
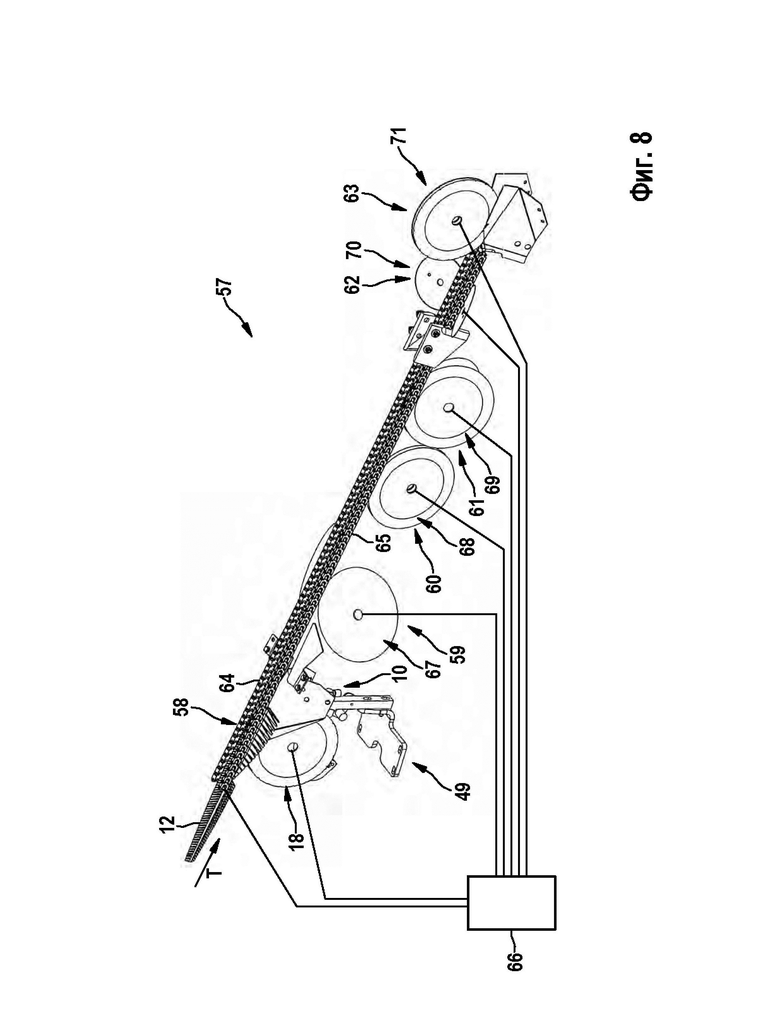
Фиг. 8 изображает установку для филетирования обезглавленной и выпотрошенной после забоя рыбы, содержащую рабочую станцию, показанную на Фиг. 3, и дополнительные рабочие станции.
Измерительная головка, изображенная на чертеже, подходит для использования между двумя дисковыми ножами ножевого узла, предназначенного для выполнения разреза по брюшку обезглавленной и выпотрошенной после забоя рыбы, подаваемой головным концом вперед, для определения длины брюшной полости. Разумеется, указанная измерительная головка также подходит для установки между дисковыми ножами других ножевых узлов, предназначенных для выполнения филетирующих разрезов. Во всех случаях измерительная головка выполнена и предназначена для генерации измерительных сигналов, на основании которых осуществляется управление дисковыми ножами или ножевыми узлами.
Измерительная головка 10 выполнена и предназначена для определения длины брюшной полости 11 обезглавленной и выпотрошенной после забоя рыбы 12, продвигаемой головным концом вперед в направлении Т перемещения, и содержит по меньшей мере один измерительный датчик 13 и по меньшей мере один датчик 14, который может быть приведен в действие измерительным датчиком 13 и который соединен с управляющим устройством 15, выполненным и предназначенным для приема и обработки поступающих измерительных сигналов.
Согласно изобретению, данная измерительная головка 10 отличается тем, что она выполнена и установлена с возможностью размещения по меньшей мере частично между двумя дисковыми ножами 16, 17 ножевого узла 18, предназначенного для выполнения филетирующего разреза по рыбе 12, так что указанный или каждый измерительный датчик 13 может быть функционально соединен с реберной костью 20 рыбы 12, находящейся ближе всего к ее анальному отверстию 19.
Описанные ниже признаки и усовершенствования, независимо от того, рассматриваются ли они по отдельности или в комбинации друг с другом, иллюстрируют предпочтительные варианты выполнения. Следует особо отметить, что комбинации признаков, приведенные в формуле изобретения, и/или в описании, и/или на чертежах, или описанные в общем варианте выполнения, также могут обеспечивать усовершенствование описанной выше измерительной головки 10 функционально независимым образом.
Измерительная головка 10 содержит базовую часть 22, которая может быть неподвижным образом прикреплена к раме 21 машины, при этом на базовой части 22 установлен с возможностью поворота по меньшей мере один измерительный датчик 13. В изображенном варианте выполнения базовая часть 22 выполнена в виде крановой балки и содержит крепежное плечо 23 и опорное плечо 24, на котором с возможностью поворота установлен указанный или каждый измерительный датчик 13. Крепежное плечо 23 прикреплено к раме 21 машины. Крепежное плечо 23 и опорное плечо 24 предпочтительно выполнены за одно целое и предпочтительно изготовлены из нержавеющей стали. В варианте выполнения, не показанном на чертежах, имеется только один измерительный датчик 13. На чертеже изображен вариант выполнения, в котором измерительная головка 10 содержит два измерительных датчика 13, 25, расположенных на расстоянии друг от друга на противоположных сторонах опорного плеча 24. Два измерительных датчика 13, 25, которые выполнены независимо друг от друга, установлены с возможностью поворота вокруг оси D поворота на стержне 26, установленном в опорном плече 24.
Оба измерительных датчика 13, 25 изготовлены из тонкого гибкого листа пружинной стали. Толщина листов пружинной стали зависит от различных факторов, в том числе от размера измеряемой рыбы, и предпочтительно составляет менее 1 мм, особенно предпочтительно менее 0,5 мм. Каждый измерительный датчик 13, 25 или каждый лист пружинной стали содержит основную часть 27. Основная часть 27 выполнена в виде плоского листа и в ее поверхности образованы отверстия или проемы 28, в которых отсутствует материал, и выемки 29. С каждой основной частью 27 связан по меньшей мере один зондирующий наконечник 30. Зондирующий наконечник 30 выполнен за одно целое с основной частью 27 и ориентирован в направлении, противоположном направлению Т перемещения, когда измерительная головка 10 находится в положении ожидания (см., например, Фиг. 4). Зондирующий наконечник 30 сужается в направлении, противоположном направлению Т перемещения. Свободный конец 31 зондирующего наконечника 30 расположен в направлении Т перемещения перед осью D поворота измерительных датчиков 13, когда измерительная головка 10 находится в положении ожидания. В положении измерения свободный конец 31 зондирующего наконечника 30 расположен в направлении Т перемещения за осью D поворота измерительных датчиков 13.
В дополнение к зондирующему наконечнику 30, основная часть 27 имеет по меньшей мере один чувствительный выступ 32, который может быть функционально соединен с датчиком 14. Чувствительный выступ 32 выполнен за одно целое с основной частью 27 и расположен в направлении Т перемещения за осью D поворота измерительных датчиков 13 как в положении ожидания, так и в положении измерения, при этом чувствительный выступ 32 обеспечивает полную видимость датчика 14 в положении ожидания и перекрывает его по меньшей мере частично, предпочтительно полностью, в положении измерения.
В дополнение к (опосредованному) соединению между двумя измерительными датчиками 13, 25 с помощью общего стержня 26, два измерительных датчика 13, 25, расположенные на расстоянии друг от друга и установленные с возможностью поворота на опорном плече 24, взаимно соединены поперечной стяжкой 33 по меньшей мере в одной точке. Первая поперечная стяжка 33 расположена перед осью D поворота измерительных датчиков 13, 25 в направлении Т перемещения обрабатываемой рыбы, при этом стяжка 33 образована болтом 34, который разъемным образом прикреплен к обоим измерительным датчикам 13, 25 и ориентирован поперек направления Т перемещения обрабатываемой рыбы. Предусмотрена возможность регулировки с точки зрения положения, в котором болт 34 закреплен относительно оси D поворота. В различных местоположениях в основных частях 27, образованных листами пружинной стали, выполнены отверстия 35, так что поперечная стяжка 33 может быть закреплена в разных положениях.
За осью D поворота измерительных датчиков 13, 25 в направлении Т перемещения обрабатываемой рыбы 12 выполнена вторая поперечная стяжка 36, образованная болтом 37, который разъемным образом прикреплен к обоим измерительным датчикам 13, 25 и ориентирован поперек направления Т перемещения. Болт 37 соединяет два измерительных датчика 13, 25 в области крепежного выступа 38, который относится к основной части 27 и выполнен с ней за одно целое. Вторая поперечная стяжка 36 взаимодействует с ограничительным элементом 39, расположенным на основной части 22. Ограничительный элемент 39 представляет собой, например, регулируемый болт 40, с помощью которого ограничивают длину диапазона поворота измерительных датчиков 13, 25. Длина диапазона поворота может регулироваться благодаря возможности регулирования болта 40 или любого другого ограничительного средства. В конечном положении диапазона поворота, которое представляет собой положение измерения, чувствительный выступ 32 закрывает датчик 14 таким образом, чтобы инициировать подачу измерительного сигнала. В изображенном варианте выполнения датчик 14 (в данном случае выполненный, например, в виде датчика приближения) расположен опосредованным образом на крепежном плече 23 базовой части 22. В частности, датчик 14 связан с регулировочной пластиной 41, которая расположена на базовой части 22, а именно на крепежном плече 23, с возможностью отсоединения и регулирования.
Измерительные датчики 13, 25 в целом удерживаются в положении ожидания подпружиненным образом (см., например, Фиг. 4), при этом между указанным или каждым измерительным датчиком 13, 25 и базовой частью 22 натянут пружинный элемент 42. Пружинный элемент 42 прикреплен одним концом к первой поперечной стяжке 33. Противоположным концом пружинный элемент 42 прикреплен к опорному плечу 24. Для этого на опорном плече 24 имеется ушко 43, в которое заведен пружинный элемент 42. Измерительные датчики 13, 25 выполнены и установлены с возможностью отклонения из указанного положения ожидания (показанного, например, на Фиг. 4) в положение измерения (показанное, например, на Фиг. 5) с преодолением упругого усилия пружинного элемента 42. В положении измерения чувствительный выступ 32 по меньшей мере частично закрывает датчик 14.
На опорном плече 24 базовой части 22 как продолжение указанного плеча расположен закрывающий/защитный элемент 44. Закрывающий/защитный элемент 44 представляет собой своего рода защитную пластину, которая по существу закрывает первую поперечную стяжку 33 и, таким образом, защищает, в частности, пружинный элемент 42. Ширина защитной пластины проходит от внутренней стороны 45 первого измерительного датчика 13 до противоположной внутренней стороны 46 второго измерительного датчика 25 и может дополнительно служить в качестве направляющей и разделителя для податливых, гибких измерительных датчиков 13, 25.
Как описано выше, каждый измерительный датчик 13, 25 образован из листа пружинной стали упруго деформируемым образом. В результате измерительные датчики 13, 25 выполнены и установлены с возможностью контакта с внутренней поверхностью 47, 48 дискового ножа 16, 17. Данные конфигурация и выполнение измерительных датчиков 13, 25 особенно эффективны при функциональном соединении с дисковыми ножами 16, 17, являющимися частью рабочей станции 49, описанной ниже.
Измерительная головка 10 может использоваться как отдельный блок, в частности также в качестве комплекта для модернизации существующих систем. Однако предпочтительно измерительная головка 10 является частью рабочей станции 49. Данная рабочая станция 49 выполнена и предназначена для обработки обезглавленной и выпотрошенной после забоя рыбы 12 и содержит ножевой узел 18, содержащий две режущие головки 51, 52, каждая из которых содержит дисковый нож 16, 17, который может быть приведен во вращательное движение, и приводной блок 53, 54 для приведения дискового ножа 16, 17 во вращательное движение, причем два дисковых ножа 16, 17 ориентированы с V-образным наклоном относительно друг друга и наклонены друг к другу в направлении, противоположном направлению Т перемещения обрабатываемой рыбы 12, при этом рабочая станция содержит измерительную головку 10 для определения длины брюшной полости 11 обезглавленной и выпотрошенной после забоя рыбы 12.
Рабочая станция 49 согласно изобретению отличается тем, что измерительная головка 10 выполнена и установлена в соответствии с одним или более из п.п. 1-18 формулы изобретения.
Два дисковых ножа 16, 17 установлены с противоположных сторон обрабатываемой рыбы 12 и расположены соответствующим образом на расстоянии друг от друга. Расстояние между двумя дисковыми ножами 16, 17 меньше, чем расстояние между двумя измерительными датчиками 13, 25, по меньшей мере на некоторых участках, в частности, из-за наклона указанных дисковых ножей относительно друг друга в направлении, противоположном направлению Т перемещения, так что ножи 16, 17 толкают два измерительных датчика 13, 25 в положение, поперечное направлению Т перемещения, вследствие расположения указанных измерительных датчиков между двумя ножами 16, 17. В любом положении измерительные датчики 13, 25 измерительной головки 10 находятся в тесном контакте с обращенными друг к другу внутренними поверхностями 47, 48 дисковых ножей 16, 17, в частности, по меньшей мере частично, а именно по меньшей мере своим зондирующим наконечником 30. Благодаря подпружиненной конфигурации и выполнению измерительных датчиков 13, 25 указанные датчики контактируют с обращенными друг к другу внутренними поверхностями 47, 48 дисковых ножей 16, 17 при небольшом давлении. Такой тесный контакт между измерительными датчиками 13, 25 и внутренними поверхностями 47, 48 дисковых ножей 16, 17 при небольшом давлении означает, что каждый измерительный датчик 13, 25 при контакте с дисковыми ножами 16, 17 находится в изогнутом или дугообразном состоянии, повторяя контур и наклон ножа, в частности, даже при переходе из положения ожидания в положение измерения. В принципе, расстояние между дисковыми ножами 16, 17 также равно расстоянию между измерительными датчиками 13, 25. В положении ожидания расстояние между измерительными датчиками 13, 25 приблизительно равно расстоянию Е между дисковыми ножами 16, 17. Указанное расстояние уменьшается в направлении Т перемещения от минимального расстояния в точке Р до расстояния S, при котором дисковые ножи 16, 17 взаимодействуют зацепление с рыбой 12, и затем увеличивается в направлении Т перемещения до расстояния А, когда измерительные датчики 13, 25 находятся в положении измерения, при этом А больше Е (см., например, Фиг. 6).
Благодаря, с одной стороны, V-образному расположению дисковых ножей 16, 17 и их наклону друг к другу в направлении, противоположном направлению Т перемещения, и, с другой стороны, расположению измерительных датчиков 13, 25 в тесном контакте с внутренними поверхностями 47, 48 дисковых ножей 16, 17 при небольшом давлении, измерительные датчики 13, 25 в положении ожидания могут быть захвачены последними реберными костями 20 перед анальным отверстием 19 рыбы 12 с обеспечением приведения в действие датчика 14 в положении измерения, в котором указанные датчики находятся в мертвой зоне резания, образованной дисковыми ножами 16, 17. В этом случае конфигурация согласно изобретению гарантирует, что измерительные датчики 13, 25 могут быть очищены от возможных остатков, в частности, поскольку указанные датчики 13, 25 расположены в мертвой зоне резания при нахождении в положении измерения. Например, как показано на Фиг. 4, в положении ожидания измерительные датчики 13, 25 своими зондирующими наконечниками 30 ориентированы в направлении, противоположном направлению Т перемещения, и, с одной стороны, выступают за режущие кромки 55, 56 дисковых ножей 16, 17, а с другой стороны, расположены в направлении Т перемещения до точки, в которой расстояние S между дисковыми ножами 16, 17 является минимальным.
В изображенном варианте выполнения ножевой узел 18 выполнен и предназначен для выполнения разреза по брюшку обезглавленной и выпотрошенной после забоя рыбы 12, перемещаемой головным концом вперед в направлении Т перемещения. Благодаря тому, что измерительная головка 10 связана с ножевым узлом 18 для выполнение разреза по брюшку, измерение может быть проведено на самом раннем этапе операции филетирования, в частности, на рыбе 12, находящейся в устойчивом состоянии, поскольку участки и кости, поддерживающие тело рыбы 12, еще не были разрезаны. Кроме того, измерение может быть проведено даже на рыбах 12, которые в продольном направлении все еще не вскрыты по брюшной полости, то есть их кожа на брюшке является цельной. Поскольку измерительные датчики 13, 25 расположены в зоне дисковых ножей 16, 17 для выполнения разреза по брюшку, после проведения зондирования реберных костей 20, расположенных последними перед анальным отверстием 19 рыбы, указанные датчики 13, 25 могут быть выведены из рыбы 12 без зацепления брюшной полости 11 или кожи брюшка.
Предпочтительно рабочая станция 49 является частью установки 57, которая выполнена и предназначена для обработки, в частности филетирования, обезглавленной и выпотрошенной после забоя рыбы 12 и содержит транспортирующее устройство 58 для удерживания и продвижения рыбы 12 головным концом вперед в направлении Т перемещения по маршруту транспортировки, а также содержит по меньшей мере одну рабочую станцию 49, расположенную вдоль маршрута транспортировки и предназначенную для обработки рыбы 12.
Согласно изобретению установка 57 отличается тем, что рабочая станция 49 выполнена и установлена в соответствии с одним или более из п.п. 19-22 формулы изобретения. В изображенном варианте выполнения вдоль маршрута транспортировки установлено несколько рабочих станций 59, 60, 61, 62, 63, которые в направлении Т перемещения расположены после рабочей станцией 49, выполненной согласно одному или более из п.п. 19-23 формулы изобретения. Как показано на Фиг. 7, рабочие станции 59-63 представляют собой ножевые узлы для выполнения разрезов по боковым частям (ножевой узел 67), реберным костям (ножевой узел 68), спинному хребту (ножевой узел 69), межмышечным костям или разрезов для получения брюшного лоскута (ножевой узел 70), а также разделительных разрезов (ножевой узел 71).
Обрабатываемая рыба 12 подается с рабочей станции 49 на рабочие станции 59-63 с помощью транспортирующего устройства 58. В изображенном варианте выполнения в качестве транспортирующего устройства 58 предпочтительно используются две зубчатые цепи 64, 65, приводимые в движение по кругу и проходящие вокруг отклоняющих и/или приводных элементов. Зубчатые цепи 64, 65 захватывают рыбу 12 с обеих сторон и удерживают ее во время перемещения по маршруту транспортировки. Также могут использоваться другие транспортирующие системы, ленты или конвейеры, содержащие соответствующие элементы для удерживания рыбы 12.
Установка 57 содержит блок 66 управления, который выполнен и предназначен для управления рабочими станциями 49, 59-63 на основании результатов измерений, полученных измерительной головкой 10, выполненной согласно одному или более из п.п. 1-19 формулы изобретения, при этом блок 66 управления содержит по меньшей мере блок оценки данных и запоминающее устройство. Управляющее устройство 15 измерительной головки 10 может быть выполнено отдельно от блока 66 управления устройства 57 или может быть его частью. Управление ножевыми узлами 67-71 может осуществляться на основании результатов измерений, полученных измерительной головкой 10, и прошедших оценку. В частности, может быть обеспечено управление ножевым узлом 67 для выполнения разрезов по боковым частям с точки зрения момента, когда дисковые ножи для выполнения разрезов по боковым частям входят во взаимодействие с рыбой 12 в начале брюшной полости 11 и отсоединяются от нее в конце брюшной полости 11, а также управление ножевым узлом 70 для выполнения разрезов по межмышечным костям или разрезов для получения брюшного лоскута с точки зрения момента регулирования и режущей кривизны дисковых ножей для выполнения разрезов по межмышечным костям или разрезов для получения брюшного лоскута вдоль линии межмышечных костей.
Ниже со ссылкой на чертеж приведено более подробное описание способа.
Способ применяют для обработки, в частности филетирования, обезглавленной и выпотрошенной после забоя рыбы 12. Для этого рыбу 12 с помощью транспортирующего устройства 58 продвигают головным концом вперед в направлении Т перемещения к по меньшей мере двум рабочим станциям 49, 59 для обработки рыбы. Разрезы для обработки, а именно филетирующие разрезы, последовательно выполняют на рабочих станциях 49, 59. Филетирующие разрезы по обрабатываемой рыбе 12 выполняют с помощью ножевых узлов 18, 67 в виде рабочих станций 49, 59 путем последовательной подачи рыбы 12 вдоль двух приводимых во вращательное движение дисковых ножей 16, 17 ножевого узла 18, 67. В качестве первого филетирующего разреза выполняют разрез по брюшку с использованием первого ножевого узла 18, после которого выполняют по меньшей мере разрез по боковым частям с использованием второго ножевого узла 67, расположенного в направлении Т перемещения после первого ножевого узла 18. Управление по меньшей мере ножевым узлом 67 для выполнения разрезов по боковым частям осуществляют на основании результатов измерений, касающихся размера рыбы 12 и полученных с помощью измерительной головки 10.
Согласно изобретению положение реберных костей 20 рыбы 12, расположенных ближе всего к ее анальному отверстию 19, определяют с помощью измерительной головки 10 и, исходя из этого, рассчитывают размер рыбы 12 для осуществления управления ножевым узлом 67, предназначенным для выполнения разрезов по боковым частям. Измерительные сигналы или результаты измерений оценивают в управляющем устройстве 15 или блоке 66 управления, и осуществляют управление указанным или каждым ножевым узлом 67 на основании установленной таким образом длины брюшной полости 11 или размера рыбы 12. Применительно к ножевому узлу 67 для выполнения разрезов по боковым частям это означает, что дисковые ножи врезаются в рыбу 12 сразу в начале брюшной полости 11 и извлекаются из рыбы 12 или по меньшей мере зачехляются в конце брюшной полости 11, так что указанные ножи узла 67 больше не выполняют никаких разрезов.
В идеале результаты измерений должны быть получены до разрезания брюшка или во время его выполнения. В данном случае в результате перемещения рыбы 12 в направлении Т перемещения реберные кости 20, расположенные ближе всего к анальному отверстию 19 по обе стороны спинного хребта, сталкиваются с измерительными датчиками 13, 25, расположенными с обеих сторон хребта, и по мере дальнейшего перемещения рыбы отклоняют указанные измерительные датчики 13, 25 до тех пор, пока они не активируют датчик 14 с помощью чувствительного выступа 32. Таким образом, получают позиционные сигналы, которые обрабатывают для определения длины брюшной полости 11 рыбы 12. Полученные таким образом управляющие данные используют для всех ножевых узлов 59-71, которые выполняют филетирующие разрезы с учетом размера рыбы. В дополнение к разрезам по боковым частям, на основании результатов измерений, полученных измерительной головкой 10, также осуществляют управление по меньшей мере ножевым узлом 70 для выполнения разрезов по межмышечным костям или разрезов для получения брюшного лоскута. Разумеется, результаты измерений, полученные с помощью измерительной головки 10 до или во время разрезания брюшка, также могут использоваться для управления другими ножевыми узлами 68, 69, 71.
Предпочтительно способ осуществляют с использованием установки 57, выполненной согласно одному или более из п.п. 23-25 формулы изобретения.
Во время измерения, то есть, в частности, даже когда измерительные датчики 13, 25 поворачиваются из положения ожидания в положение измерения, а также обратно, указанные датчики 13, 25 скользят по внутренним поверхностям 47, 48 дисковых ножей 16, 17. Предпочтительно в область контакта измерительных датчиков 13, 25 с дисковыми ножами 16, 17 через соответствующие впускные отверстия, сопла и т.п. подается текучая среда, в частности вода, так что измерительные датчики 13, 25 скользят по внутренним поверхностям 47, 48 дисковых ножей 16, 17 почти гидродинамическим образом.
Изобретение относится к пищевой промышленности, а именно к разделке рыбы. Предложена измерительная головка для определения длины брюшной полости обезглавленной и выпотрошенной после забоя рыбы, перемещаемой головным концом вперед в направлении Т перемещения, содержащая по меньшей мере один измерительный датчик и по меньшей мере один датчик, выполненный с возможностью активации измерительным датчиком и соединенный с управляющим устройством, которое выполнено и предназначено для приема и обработки входящих измерительных сигналов. Измерительная головка размещена между двумя дисковыми ножами ножевого узла, предназначенного для выполнения филетирующего разреза по рыбе, а измерительный датчик выполнен с возможностью сталкивания с реберной костью рыбы, находящейся ближе всего к анальному отверстию рыбы, при ее перемещении, и активации при этом датчика, соединенного с управляющим устройством. Изобретение обеспечивает эффективное филетирование обезглавленной и выпотрошенной после забоя рыбы. 4 н. и 24 з.п. ф-лы, 8 ил.
1. Измерительная головка (10) для определения длины брюшной полости (11) обезглавленной и выпотрошенной после забоя рыбы (12), перемещаемой головным концом вперед в направлении Т перемещения, содержащая по меньшей мере один измерительный датчик (13) и по меньшей мере один датчик (14), выполненный с возможностью активации измерительным датчиком (13) и соединенный с управляющим устройством (15), которое выполнено и предназначено для приема и обработки входящих измерительных сигналов, отличающаяся тем, что измерительная головка (10) размещена между двумя дисковыми ножами (16, 17) ножевого узла (18), предназначенного для выполнения филетирующего разреза по рыбе (12), а измерительный датчик (13) выполнен с возможностью сталкивания с реберной костью (20) рыбы (12), находящейся ближе всего к анальному отверстию (19) рыбы (12), при ее перемещении, и активации при этом датчика, соединенного с управляющим устройством.
2. Измерительная головка (10) по п.1, отличающаяся тем, что она содержит базовую часть (22), выполненную с возможностью прикрепления к раме (21) машины неподвижным образом, при этом на базовой части (22) установлен с возможностью поворота по меньшей мере один измерительный датчик (13).
3. Измерительная головка (10) по п.2, отличающаяся тем, что базовая часть (22) выполнена в виде крановой балки и содержит крепежное плечо (23) и опорное плечо (24), на котором с возможностью поворота установлен указанный или каждый измерительный датчик (13).
4. Измерительная головка (10) по п.3, отличающаяся тем, что она содержит два измерительных датчика (13, 25), которые расположены на расстоянии друг от друга на противоположных сторонах опорного плеча (24).
5. Измерительная головка (10) по одному или более из пп.1-4, отличающаяся тем, что указанный или каждый измерительный датчик (13, 25) изготовлен из тонкого гибкого листа пружинной стали.
6. Измерительная головка (10) по одному или более из пп.3-5, отличающаяся тем, что два измерительных датчика (13, 25), расположенные на расстоянии друг от друга и установленные с возможностью поворота на опорном плече (24), взаимно соединены поперечной стяжкой (33, 36) по меньшей мере в одной точке.
7. Измерительная головка (10) по п.6, отличающаяся тем, что первая поперечная стяжка (33) выполнена перед осью D поворота измерительных датчиков (13, 25) в направлении Т перемещения обрабатываемой рыбы (12), при этом поперечная стяжка (33) образована болтом (34), который разъемным образом прикреплен к обоим измерительным датчикам (13, 25) и ориентирован поперек направления Т перемещения.
8. Измерительная головка (10) по п.6 или 7, отличающаяся тем, что за осью D поворота измерительных датчиков (13, 25) в направлении Т перемещения обрабатываемой рыбы (12) выполнена вторая поперечная стяжка (36), образованная болтом (37), который разъемным образом прикреплен к обоим измерительным датчикам (13, 25) и ориентирован поперек направления Т перемещения.
9. Измерительная головка (10) по п.8, отличающаяся тем, что вторая поперечная стяжка (36) взаимодействует с ограничительным элементом (39), расположенным на базовой части (22).
10. Измерительная головка (10) по одному или более из пп.1-9, отличающаяся тем, что каждый измерительный датчик (13, 25) содержит основную часть (27), имеющую зондирующий наконечник (30).
11. Измерительная головка (10) по п.10, отличающаяся тем, что основная часть (27) имеет чувствительный выступ (32), выполненный с возможностью функционального соединения с датчиком (14).
12. Измерительная головка (10) по одному или более из пп.2-11, отличающаяся тем, что датчик (14) расположен на базовой части (22).
13. Измерительная головка (10) по одному или более из пп.2-12, отличающаяся тем, что датчик (14) расположен непосредственно или опосредованно на крепежном плече (23) базовой части (22).
14. Измерительная головка (10) по одному или более из пп.2-13, отличающаяся тем, что указанный или каждый измерительный датчик (13, 25) удерживается в положении ожидания подпружиненным образом, при этом между указанным или каждым измерительным датчиком (13, 25) и базовой частью (22) натянут пружинный элемент (42).
15. Измерительная головка (10) по п.14, отличающаяся тем, что указанный или каждый измерительный датчик (13, 25) выполнен и установлен с возможностью отклонения в положение измерения с преодолением упругого усилия пружинного элемента (42).
16. Измерительная головка (10) по п.14 или 15, отличающаяся тем, что в положении измерения чувствительный выступ (32) по меньшей мере частично закрывает датчик (14).
17. Измерительная головка (10) по одному или более из пп.11-16, отличающаяся тем, что пружинный элемент (42) натянут между первой поперечной стяжкой (33) и опорным плечом (24) базовой части (22).
18. Измерительная головка (10) по одному или более из пп.1-17, отличающаяся тем, что указанный или каждый измерительный датчик (13, 25) выполнен и установлен с возможностью контакта с внутренней поверхностью (47, 48) дискового ножа (16, 17).
19. Рабочая станция (49) для филетирования обезглавленной и выпотрошенной после забоя рыбы (12), содержащая ножевой узел (18), содержащий две режущие головки (51, 52), каждая из которых содержит дисковый нож (16, 17), выполненный с возможностью приведения во вращательное движение, и приводной блок (53, 54) для приведения дискового ножа (16, 17) во вращательное движение, при этом два дисковых ножа (16, 17) ориентированы с V-образным наклоном относительно друг друга и наклонены друг к другу в направлении, противоположном направлению Т перемещения обрабатываемой рыбы (12), при этом рабочая станция содержит измерительную головку (10) для определения длины брюшной полости (11) обезглавленной и выпотрошенной после забоя рыбы (12), отличающаяся тем, что измерительная головка (10) выполнена согласно одному или более из пп.1-18.
20. Рабочая станция (49) по п.19, отличающаяся тем, что в любом положении измерительные датчики (13, 25) измерительной головки (10) находятся в тесном контакте с обращенными друг к другу внутренними поверхностями (47, 48) дисковых ножей (16, 17) по меньшей мере частично, а именно, по меньшей мере, своим зондирующим наконечником (30).
21. Рабочая станция (49) по п.19 или 20, отличающаяся тем, что в положении ожидания измерительные датчики (13, 25) своими зондирующими наконечниками (30) ориентированы в направлении, противоположном направлению Т перемещения, и, с одной стороны, выступают за режущие кромки (55, 56) дисковых ножей (16, 17), а с другой стороны, расположены в направлении Т перемещения до точки P, в которой расстояние S между дисковыми ножами (16, 17) является минимальным.
22. Рабочая станция (49) по одному или более из пп.19-21, отличающаяся тем, что ножевой узел (18) выполнен и предназначен для выполнения разреза по брюшку обезглавленной и выпотрошенной после забоя рыбы (12), перемещаемой головным концом вперед в направлении Т перемещения.
23. Установка (57) для филетирования обезглавленной и выпотрошенной после забоя рыбы (12), содержащая транспортирующее устройство (58) для удерживания и перемещения рыбы (12) головным концом вперед в направлении Т перемещения по маршруту транспортировки и по меньшей мере одну рабочую станцию (49), расположенную вдоль маршрута транспортировки и предназначенную для обработки рыбы (12), отличающаяся тем, что рабочая станция (49) выполнена и установлена согласно одному или более из пп.19-22.
24. Установка (57) по п.23, отличающаяся тем, что вдоль маршрута транспортировки установлен набор рабочих станций (59, 60, 61, 62, 63), которые в направлении Т перемещения расположены за рабочей станцией (49), выполненной согласно одному или более из пп.19-22.
25. Установка (57) по п.23 или 24, отличающаяся тем, что она содержит блок (66) управления, который выполнен и предназначен для управления рабочими станциями (49, 59-63) на основании результатов измерений, полученных измерительной головкой (10) по одному или более из пп.1-18, при этом блок (66) управления содержит, по меньшей мере, блок оценки данных и запоминающее устройство.
26. Способ филетирования обезглавленной и выпотрошенной после забоя рыбы (12) с помощью рабочих станций по одному или более из пп.19-22, включающий следующие этапы:
продвижение рыбы (12) головным концом вперед в направлении Т перемещения к по меньшей мере двум рабочим станциям (49, 59) для обработки рыбы при помощи транспортирующего устройства (58),
выполнение технологических разрезов по обрабатываемой рыбе (12) с помощью ножевых узлов (18, 67) в виде рабочих станций (49, 59) путем последовательного перемещения обрабатываемой рыбы (12) вдоль двух дисковых ножей (16, 17) ножевого узла (18, 67), приводимых во вращательное движение,
причем сначала выполняют разрез по брюшку с использованием первого ножевого узла (18), а затем выполняют по меньшей мере один разрез по боковым костям с использованием второго ножевого узла (67), расположенного в направлении Т перемещения после первого ножевого узла (18),
при этом определяют с помощью измерительной головки (10) положение реберных костей (20) рыбы (12), расположенных ближе всего к ее анальному отверстию (19), и исходя из этого рассчитывают размер рыбы (12), и
управление ножевым узлом (67) для выполнения разрезов по боковым частям осуществляют на основании рассчитанного размера рыбы (12).
27. Способ по п.26, отличающийся тем, что результаты измерений получают до выполнения разреза по брюшку или во время выполнения указанного разреза.
28. Способ по одному или более из пп.26, 27, отличающийся тем, что на основании результатов измерений, полученных измерительной головкой (10), также осуществляют управление, по меньшей мере, ножевым узлом (70) для выполнения разрезов по межмышечным костям или разрезов для получения брюшного лоскута.
| US 11140907 B2, 12.10.2021 | |||
| DE 3206274 A1, 01.09.1983 | |||
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| СПОСОБ МЕХАНИЗИРОВАННОГО УДАЛЕНИЯ МЕЖМЫШЕЧНЫХ КОСТЕЙ ИЗ ФИЛЕЙНЫХ ЧАСТЕЙ ТРАНСПОРТИРУЕМЫХ РЫБ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2576068C1 |
| Устройство для филетирования мелкой рыбы | 1982 |
|
SU1082368A1 |

