Изобретение предназначено для использования на железнодорожном транспорте и относится к устройствам автоматики и телемеханики для управления вагонными замедлителями на сортировочных горках.
Известны вагонные замедлители (патент US №5730260 от 24.07.1997 г., патент US №6199671 от 06.11.1998 г., патент CN №2936868Y от 24.07.2006 г., патент RU №171002 от 04.07.2016 г., патент RU №184348 от 21.12.2017 г.), каждый из которых состоит из корпуса с элементами крепления к рельсам, выполненного в виде стакана, внутри которого расположен полый цилиндр с поршнем, делящий полый цилиндр на две полости: гидравлическую и газовую. Верхняя часть полого цилиндра имеет грибовидную головку, взаимодействующую с гребнем колеса тележки железнодорожного вагона. При перемещении полого цилиндра внутри корпуса вниз под силовым воздействием гребня колеса происходит перетекание жидкости из одной полости полого цилиндра в другую, сопровождаемое дросселированием, обеспечивающим силу сопротивления движению полого цилиндра вниз и качению колеса по головке полого цилиндра.
Недостаток известных конструкций вагонного замедлителя с газогидравлическим цилиндром - в сложности конструкции вагонного замедлителя.
Известны вагонные замедлители (а.с. SU №1119901 от 31.05.1983 г., патент RU №65453 от 18.07.2006 г., патент RU № 2360816 от 05.02.2008 г.), каждый из которых имеет вертикально расположенные вдоль рельсового пути гидроцилиндры, полости под поршнем или штоком которых заполнены жидкостью, а концы штоков снабжены толкателями грибовидной формы, взаимодействующими с гребнями колес. Такие вагонные замедлители имеют балочные тормоза, обеспечивающие торможение вагона, приводимые в действие гидроцилиндрами, соединенными с гидравлическими полостями вертикально расположенных гидравлических цилиндров.
Недостаток данных вагонных замедлителей - в сложности гидравлической системы, имеющей исполнительные элементы, но не имеющие датчиков, на основе сигналов (например, датчики давления жидкости в гидролинии) от которых должны управляться исполнительные элементы, обеспечивая торможение вагонов балочными тормозами.
Известен вагонный замедлитель (патент RU №2737178 от 12.07.2017 г.), имеющий газогидравлический цилиндр, в котором перетекание жидкости под давлением из одной полости в другую регулируется дросселем, автоматически управляемым в зависимости от температуры жидкости.
Недостаток данного вагонного замедлителя - в сложности его конструкции.
Известен цифровой гидравлический дроссель (патент RU №2185651 от 26.01.2000 г.), в котором размер дросселирующего отверстия управляется линейным пилотным клапаном.
Известен управляемый прямоточный дроссель (патент RU №2139464 от 30.12.1997 г.), линейным движением которого, изменяющим площадь сечения дросселирующего отверстия, управляет привод вращательного движения.
Известен вагонный замедлитель с газогидравлическим цилиндром с поршнем и штоком с дросселем (патент RU №177917 от 15.02.2017 г.), размер дросселирующего отверстия которого регулируется приводом вращательного движения с шаговым электродвигателем, встроенным внутри поршня.
Недостаток данного вагонного замедлителя - в сложности его конструкции и неблагоприятные условия эксплуатации, обусловленные расположением шагового электродвигателя внутри поршня газогидравлического цилиндра.
Известен вагонный замедлитель с балочным тормозом, приводимым горизонтально расположенным гидравлическим цилиндром (патент RU №2564299 от 14.06.2012 г., прототип вагонного замедлителя), соединенным с вертикально расположенным газогидравлическим цилиндром, грибовидная головка которого взаимодействует с гребнем колес железнодорожного вагона. Положение головки цилиндра контролируется сенсором вращательного движения рычага, взаимодействующего с головкой или другой подвижной частью вертикального цилиндра. Данные от сенсора о положении головки цилиндра обрабатываются аналитическим устройством и передаются на контроллер (устройство аналитической обработки и устройство контроля эквивалентны блоку управления).
Также этим патентом защищен способ определения положения вертикально подвижного тормозного элемента, включающий передачу данных от сенсора в аналитическое устройство, которое обрабатывает полученные данные и передает их в контроллер.
Недостаток данного вагонного замедлителя - в сложности его конструкции, включающего гидроцилиндры, передающие силовое воздействие от гребней колес через другие гидроцилиндры, осуществляющие силовое воздействие на балочный тормоз колес железнодорожного вагона, а также в сложности сенсорного устройства, следящего за положением головки каждого гидроцилиндра, взаимодействующего с гребнями колес через рычажное устройство. Следствие недостатка - нецелесообразность применения данного вагонного замедлителя на сортировочных горках с малыми вагонопотоками.
Известна система управления пневматическим приводом вагонного замедлителя (патент RU №2750559 от 11.11.2020, прототип системы управления), имеющая блок коммутации с блоком гальванических развязок и грозозащиты; электронный блок управления (ЭБУ), включающий: контроллер, энергонезависимую память, соединенную с контроллером, модуль аналоговых сигналов (MAC) и модуль дискретных сигналов (МДС), соединенные с контроллером; шину, соединяющую датчики с MAC; шину, соединяющую МДС с приводами управляемых элементов системы; пульт оператора с интерфейсом, входы которого соединены через блок коммутации с выходами управления от горочного поста (ГП); блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, МДС; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту оператора.
Недостаток данной системы управления - пониженные быстродействие и точность управления вагонным замедлителем вследствие того, что система управления является трехкаскадной, в которой ЭБУ управляет электропневматическим блоком управления, который передает управляющие воздействия на балочный тормоз через пневматический блок управления.
Известен способ управления вагонным замедлителем (п. 6 формулы изобретения по патенту RU №2750559 от 11.11.2020), включающий: получение ЭБУ данных от ГП о заданном уровне давления в рабочих цилиндрах привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления; получение ЭБУ сигналов от набора датчиков давления; подачу управляющего сигнала от МДС ЭБУ электропривод исполнительного элемента ГЦ и отсчет времени от момента подачи этого сигнала; контроль уровня давления, регистрируемого датчиками давления, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП; регистрация датчиками давления через заданный интервал времени контроллером ЭБУ уровня давления в гидролинии; поступление команды от ГП на последующее изменение давления в гидролиниях.
Недостаток данного способа управления вагонным замедлителем - множество команд управления, передаваемых через трехкаскадную систему управления и, как следствие, пониженное быстродействие процесса управления.
Общая техническая задача изобретения - обеспечение целесообразности применения вагонного замедлителя на сортировочных станциях с малыми вагонопотоками, - выполняется в соответствии с единым изобретательским замыслом, реализованным в вагонном замедлителе, его системе управления и способе управления.
Далее в описании и формуле изобретения использованы следующие сокращения:
БУ - блок управления;
ГП - горочный пост;
ГЦ - гидроцилиндр;
ДП - датчик положения поршня гидроцилиндра;
ДД - датчик давления жидкости в гидролинии;
ДЭБУ - дополнительный электронный блок управления;
ШД - шаговый двигатель;
ЭБУ - электронный блок управления.
Технические задачи, решаемые в соответствии с единым изобретательским замыслом: упрощение конструкции вагонного замедлителя; повышение быстродействия системы управления и точности управления; повышение эффективности работы вагонного замедлителя на сортировочных горках с небольшим вагонопотоком.
Техническая задача «упрощение конструкции вагонного замедлителя» решена в вагонном замедлителе, имеющем: установленные вдоль рельсового пути гидроцилиндры (ГЦ) с поршнями и штоками в корпусе ГЦ, концы штоков которых имеют головку грибовидной формы для взаимодействия с гребнями колес вагона, корпус каждого ГЦ, закрепленный на рельсе между шпалами, с полостью под поршнем каждого ГЦ, заполненной рабочей жидкостью, с отверстием под штуцер в корпусе со стороны полости под поршнем, при этом полости смежных ГЦ соединены между собой гидролинией, блок управления (БУ), соединенный с датчиками и исполнительными элементами, установленными в гидролинии, при этом в гидролинии, соединяющей полости ГЦ, установлен регулируемый дроссель с управляемым электрическим приводом, а с обеих сторон дросселя в гидролинии установлены датчики давления с электрическими выходами; каждый ГЦ имеет датчик положения поршня с электрическими выходом; каждый электропривод дросселя пары ГЦ соединен с БУ, управляющим, по меньшей мере, одним дросселем, при этом к БУ подсоединены электрические выходы датчиков давления и датчиков положения поршня ГЦ; два ГЦ установлены на расстоянии между их осями, определяемом по формуле:
Дг<В<А,
где А - расстояние между осями вагонной тележки,
В - расстояние между осями гидроцилиндров,
Дг - размер головки штока в направлении, параллельном рельсу.
Для повышения быстродействия системы управления вагонным замедлителем электропривод дросселя является линейным или вращательным от шагового электродвигателя.
Для упрощения сенсорного устройства датчик положения имеет магнитное кольцо, установленное на поршне, и установленные на корпусе ГЦ датчики Холла, управляемые полем магнитного кольца.
Для повышения силы торможения и обеспечения ее двухстороннего действия на вагон пары гидроцилиндров установлены на левом и правом рельсах.
Система управления вагонным замедлителем вышеописанной конструкции, обеспечивающая повышение его быстродействия, может быть выполнена по одному из двух нижеследующих вариантов.
По первому варианту система управления вагонным замедлителем имеет: блок коммутации с блоком гальванических развязок и грозозащиты; ЭБУ, включающий: контроллер, энергонезависимую память, соединенную с контроллером, MAC и МДС, соединенные с контроллером; шину, соединяющую датчики с MAC; шину, соединяющую МДС с приводами управляемых элементов системы; пульт оператора с интерфейсом, входы которого соединены через блок коммутации с выходами управления от ГП; блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, МДС; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту оператора, при этом датчики положения поршня и датчики давления, расположенные с обеих сторон дросселя соединены в единую шину, соединенную со входом MAC ЭБУ, МДС ЭБУ соединен единой шиной с электрическими приводами управления дросселями пар гидроцилиндров.
По второму варианту система управления вагонным замедлителем имеет: блок коммутации с блоком гальванических развязок и грозозащиты; ЭБУ, включающий: контроллер, энергонезависимую память, соединенную с контроллером, MAC и МДС, соединенные с контроллером; дополнительный блок управления; шину, соединяющую датчики с MAC; шину, соединяющую МДС с приводами управляемых элементов системы; пульт оператора с интерфейсом, входы которого соединены через блок коммутации с выходами управления от ГП; шину, соединяющую MAC с датчиками давления, блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, МДС; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту оператора, при этом каждая пара ГЦ, соединенных между собой через управляемый дроссель, имеет дополнительный электронный блок управления (ДЭБУ), состоящий из: микроконтроллера и подключенных к нему энергонезависимой памяти, MAC, соединенного шиной с датчиками давления и датчиками положения каждого ГЦ, МДС, соединенного с электрическим приводом управляемого дросселя, при этом МДС каждого ДЭБУ соединены шиной с модулем дискретных сигналов ЭБУ.
Способ управления вагонным замедлителем, осуществляемый системой управления, обеспечивающий повышение эффективности работы вагонного замедлителя, реализуется в двух вариантах, соответствующих двум вариантам системы управления.
Первый вариант способа управления вагонным замедлителем, реализуемый с помощью первого варианта системы управления, включает: получение ЭБУ данных от ГП о заданном уровне давления в гидроцилиндрах привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления; получение ЭБУ сигналов от набора датчиков давления; подачу управляющего сигнала от МДС ЭБУ на электропривод исполнительного элемента ГЦ и отсчет времени от момента подачи этого сигнала; контроль уровня давления, регистрируемого датчиками давления, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП; регистрация датчиками давления через заданный интервал времени контроллером ЭБУ уровня давления в гидролинии; поступление команды от ГП на последующее изменение давления в гидролиниях, при этом в процессе управления вагонным замедлителем системой управления осуществляется: подача управляющего сигнала от МДС ЭБУ осуществляется в соответствии с рабочей программой, записанной в его энергонезависимой памяти в отдельном разделе, на электропривод дросселя пары ГЦ; опрос и сохранение поступивших через MAC ЭБУ данных от датчиков положения поршня ГЦ и датчиков давления, установленных в гидролиниях, после чего контроллер ЭБУ формирует управляющий сигнал на электропривод дросселя пары ГЦ; подача управляющего сигнала от МДС ЭБУ на электропривод дросселя пары ГЦ и отсчет времени от момента подачи данного сигнала до достижения в гидролиниях давления ступени, заданной оператором; подача управляющего сигнала большей интенсивности на электропривод дросселя пары ГЦ в том случае, если за заданный интервал времени изменения положения поршня ГЦ не достигнута заданная скорость изменения давления в гидролиниях; задание временных интервалов измерения давления датчиками давления и положения поршня ГЦ ЭБУ отдельно для каждой пары ГЦ или для пар ГЦ, установленных на левом и правом рельсах; корректировка шага смещения дросселя контроллером ЭБУ в соответствии с данными, поступившими от датчиков положения поршней ГЦ и давления в гидролиниях, а также сигналами, поступившими от ЭБУ в соответствии указаниями рабочей программы, записанной в его энергонезависимой памяти; анализ и выявление состояния отказов вагонных замедлителей блоком диагностики на основе показаний датчиков давления в гидролиниях и датчиков положения поршней ГЦ; передача данных о текущем состоянии вагонных замедлителей на ГП.
Второй вариант способа управления вагонным замедлителем описанной выше конструкции реализуется с помощью второго варианта системы управления.
Второй вариант способа управления вагонным замедлителем включает: получение ЭБУ данных от ГП о заданном уровне давления в гидроцилиндрах привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления; получение БУ данных от набора датчиков давления; подачу управляющего сигнала от МДС ЭБУ на электропривод исполнительного элемента ГЦ и отсчет времени от момента подачи этого сигнала; контроль уровня давления, регистрируемого датчиками давления, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП; регистрация датчиками давления через заданный интервал времени контроллером БУ уровня давления в гидролинии; поступление команды от ГП на последующее изменение давления в гидролиниях, при этом в процессе управления вагонным замедлителем системой управления осуществляется: подача управляющего сигнала от МДС ЭБУ на МДС ДЭБУ, которые сохраняются в энергонезависимой памяти ДЭБУ, обрабатываются микроконтроллером ДЭБУ в соответствии с рабочей программой, записанной в его энергонезависимой памяти, в отдельном разделе которой ДЭБУ сохраняет поступившие через MAC данные от подключенных к ДЭБУ датчиков положения поршней ГЦ и датчиков давления, установленных в гидролинии, после чего микроконтроллер ДЭБУ формирует управляющий сигнал на электропривод дросселя пары ГЦ или пар ГЦ, установленных на левом и правом рельсах; подача управляющего сигнала от МДС ДЭБУ на электропривод дросселя пары ГЦ или пар ГЦ, установленных на левом и правом рельсах, и отсчет времени от момента подачи данного сигнала до достижения в гидролинии давления ступени, заданной оператором; подача ДЭБУ управляющего сигнала большей интенсивности на электропривод дросселя пары ГЦ в том случае, если за заданный интервал времени на изменение положения поршней ГЦ не достигнута заданная скорость изменения давления в гидролинии; задание ДЭБУ временных интервалов измерения давления датчиками давления и положения поршней ГЦ ЭБУ отдельно для каждой пары ГЦ или пар ГЦ, установленных на левом и правом рельсах; корректировка шага смещения дросселя микроконтроллером ДЭБУ в соответствии с данными, поступившими от датчиков положения поршней ГЦ и давления в гидролинии, а также сигналами, поступившими от ЭБУ в соответствии указаниями рабочей программы, записанной в его энергонезависимой памяти; анализ и выявление состояния отказов вагонных замедлителей блоком диагностики на основе показаний датчиков давления в гидролиниях и датчиков положения поршней ГЦ; передача данных о текущем состоянии вагонных замедлителей на ГП.
Заявленный технический эффект, - упрощение конструкции вагонного замедлителя и обеспечение целесообразности его применения на сортировочных станциях с малыми вагонопотоками, - обеспечивается следующей совокупностью отличительных признаков вагонного замедлителя: в гидролинии, соединяющей полости ГЦ, установлен регулируемый дроссель с управляемым электрическим приводом, а с обеих сторон дросселя в гидролинии установлены датчики давления с электрическими выходами; каждый ГЦ имеет датчик положения поршня с электрическими выходами; каждый электропривод дросселя пары ГЦ соединен с БУ, управляющим, по меньшей мере, одним дросселем, при этом к БУ подсоединены электрические выходы датчиков давления и датчиков положения поршня ГЦ; два ГЦ установлены на расстоянии между их осями, определяемом по формуле:
Дг<В<А,
где А - расстояние между осями вагонной тележки,
В - расстояние между осями гидроцилиндров,
Дг - размер головки штока в направлении, параллельном рельсу.
Заявленный технический эффект, - повышение быстродействия системы управления и точности управления, - обеспечивается следующей совокупностью отличительных признаков системы управления вагонным замедлителем: по первому варианту системы управления вагонным замедлителем технический эффект достигается за счет следующей совокупности отличительных признаков: датчики положения поршня и датчики давления, расположенные с обеих сторон дросселя, соединены в единую шину, соединенную со входом MAC ЭБУ; МДС ЭБУ соединен единой шиной с электрическими приводами управления дросселями пар гидроцилиндров; по второму варианту системы управления вагонным замедлителем технический эффект достигается за счет следующей совокупности отличительных признаков: каждая пара ГЦ, соединенных между собой через управляемый дроссель, имеет ДЭБУ, состоящий из микроконтроллера и подключенной к нему энергонезависимой памяти, MAC, соединенного шиной с датчиками давления и датчиками положения каждого ГЦ, МДС, соединенного с электрическим приводом управляемого дросселя, при этом МДС каждого ДЭБУ соединены шиной с МДС ЭБУ.
Заявленный технический эффект, - повышение эффективности работы вагонного замедлителя на сортировочных горках с небольшим вагонопотоком, - обеспечивается следующей совокупностью отличительных признаков способа управления вагонным замедлителем: по первому варианту способа управления вагонным замедлителем технический эффект достигается за счет следующей совокупности отличительных признаков: подача управляющего сигнала от МДС ЭБУ осуществляется в соответствии с рабочей программой, записанной в его энергонезависимой памяти в отдельном разделе, на электропривод дросселя пары ГЦ; опрос и сохранение поступивших через MAC ЭБУ данных от датчиков положения поршня ГЦ и датчиков давления, установленных в гидролиниях, после чего контроллер ЭБУ формирует управляющий сигнал на электропривод дросселя пары ГЦ; подача управляющего сигнала от МДС ЭБУ на электропривод дросселя пары ГЦ и отсчет времени от момента подачи данного сигнала до достижения в гидролиниях давления ступени, заданной оператором; подача управляющего сигнала большей интенсивности на электропривод дросселя пары ГЦ в том случае, если за заданный интервал времени изменения положения поршня ГЦ не достигнута заданная скорость изменения давления в гидролиниях; задание временных интервалов измерения давления датчиками давления и положения поршня ГЦ ЭБУ отдельно для каждой пары ГЦ или для пар ГЦ, установленных на левом и правом рельсах; корректировка шага смещения дросселя контроллером ЭБУ в соответствии с данными, поступившими от датчиков положения поршней ГЦ и давления в гидролиниях, а также сигналами, поступившими от ЭБУ в соответствии указаниями рабочей программы, записанной в его энергонезависимой памяти; анализ и выявление состояния отказов вагонных замедлителей блоком диагностики на основе показаний датчиков давления в гидролиниях и датчиков положения поршней ГЦ; передача данных о текущем состоянии вагонных замедлителей на ГП;
по второму варианту способа управления вагонным замедлителем технический эффект достигается за счет следующей совокупности отличительных признаков: подача управляющего сигнала от МДС ЭБУ на МДС ДЭБУ, которые сохраняются в энергонезависимой памяти ДЭБУ, обрабатываются микроконтроллером ДЭБУ в соответствии с рабочей программой, записанной в его энергонезависимой памяти, в отдельном разделе которой ДЭБУ сохраняет поступившие через MAC данные от подключенных к ДЭБУ датчиков положения поршней ГЦ и датчиков давления, установленных в гидролинии, после чего микроконтроллер ДЭБУ формирует управляющий сигнал на электропривод дросселя пары ГЦ или пар ГЦ, установленных на левом и правом рельсах; подача управляющего сигнала от МДС ДЭБУ на электропривод дросселя пары ГЦ или пар ГЦ, установленных на левом и правом рельсах, и отсчет времени от момента подачи данного сигнала до достижения в гидролинии давления ступени, заданной оператором; подача ДЭБУ управляющего сигнала большей интенсивности на электропривод дросселя пары ГЦ в том случае, если за заданный интервал времени на изменение положения поршней ГЦ не достигнута заданная скорость изменения давления в гидролинии; задание ДЭБУ временных интервалов измерения давления датчиками давления и положения поршней ГЦ ЭБУ отдельно для каждой пары ГЦ или пар ГЦ, установленных на левом и правом рельсах; корректировка шага смещения дросселя микроконтроллером ДЭБУ в соответствии с данными, поступившими от датчиков положения поршней ГЦ и давления в гидролинии, а также сигналами, поступившими от ЭБУ в соответствии указаниями рабочей программы, записанной в его энергонезависимой памяти; анализ и выявление состояния отказов вагонных замедлителей блоком диагностики на основе показаний датчиков давления в гидролиниях и датчиков положения поршней ГЦ; передача данных о текущем состоянии вагонных замедлителей на ГП.
Приведенные совокупности отличительных признаков вагонного замедлителя, системы управления вагонным замедлителем и способа управления вагонным замедлителем не обнаружены в процессе патентно-информационного поиска, следовательно, заявленные вагонный замедлитель, система и способ управления вагонным замедлителем соответствуют критерию «новизна». Они также не следуют явно из уровня техники, следовательно, они соответствуют критерию «изобретательский уровень».
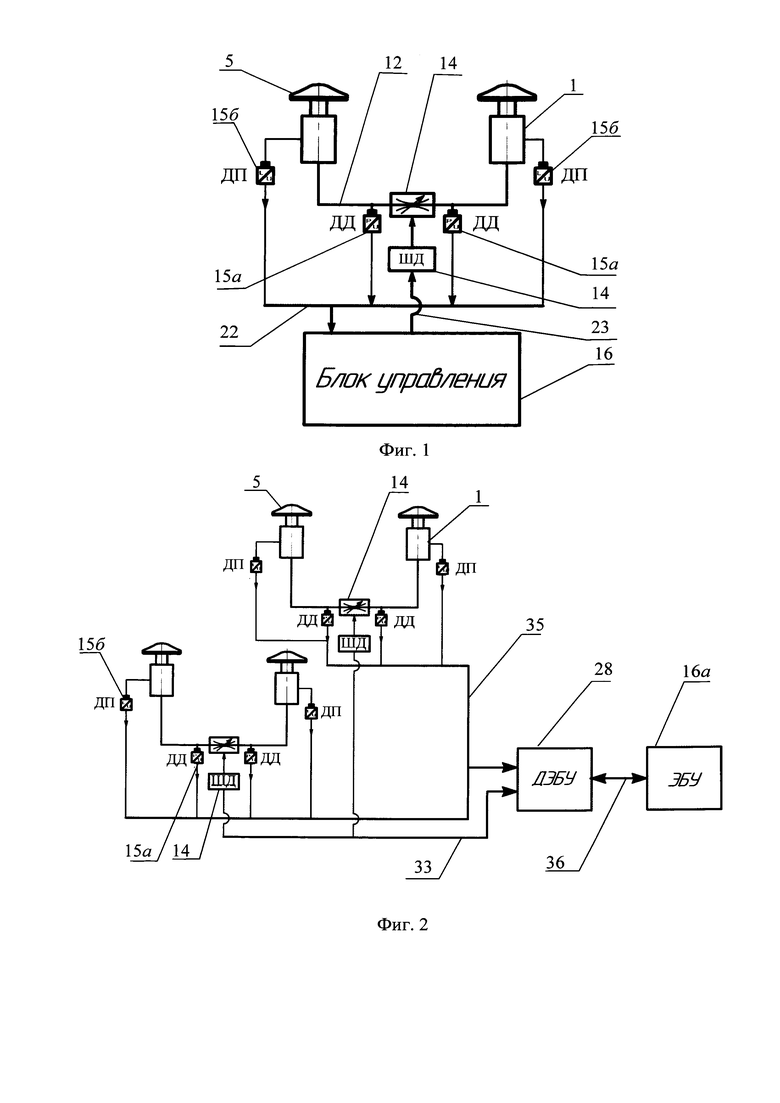
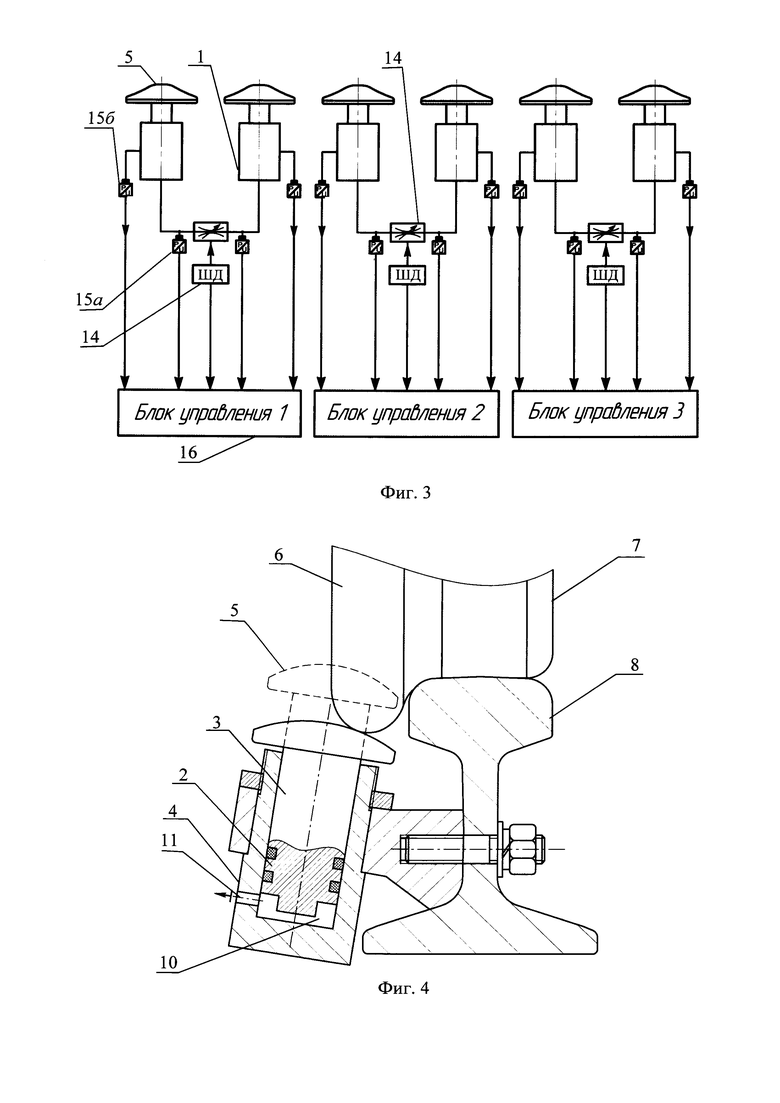
На фиг. 1 показан вагонный замедлитель с двумя гидравлическими цилиндрами, соединенными гидролинией с управляемым дросселем.
На фиг. 2 показан вагонный замедлитель с двумя парами гидравлических цилиндров, соединенных гидролинией с дросселем, расположенных в два ряда вдоль рельсов.
На фиг. 3 показаны несколько пар гидравлических цилиндров вагонного замедлителя с гидроцилиндрами, входящими в пару, расположенными на расстоянии, большем хорды на уровне колеса железнодорожного вагона.
На фиг. 4 показана конструкция гидравлического цилиндра с креплением к рельсу.
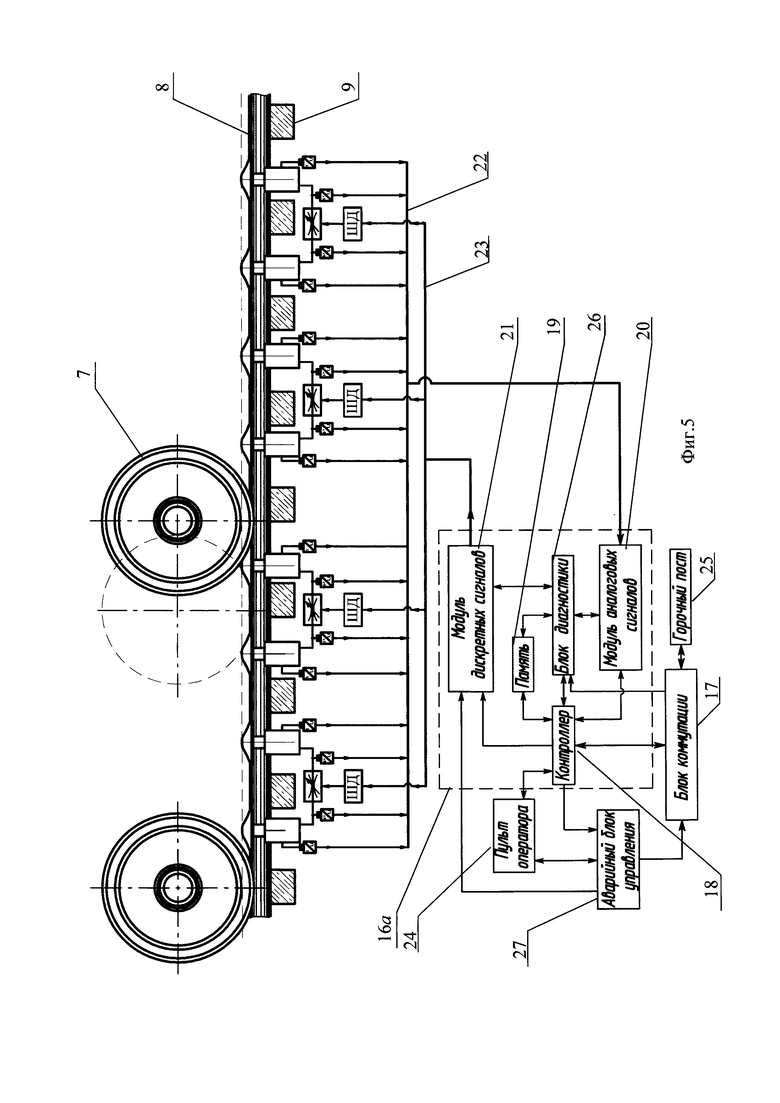
На фиг. 5 показана схема системы управления вагонным замедлителем по первому варианту системы.
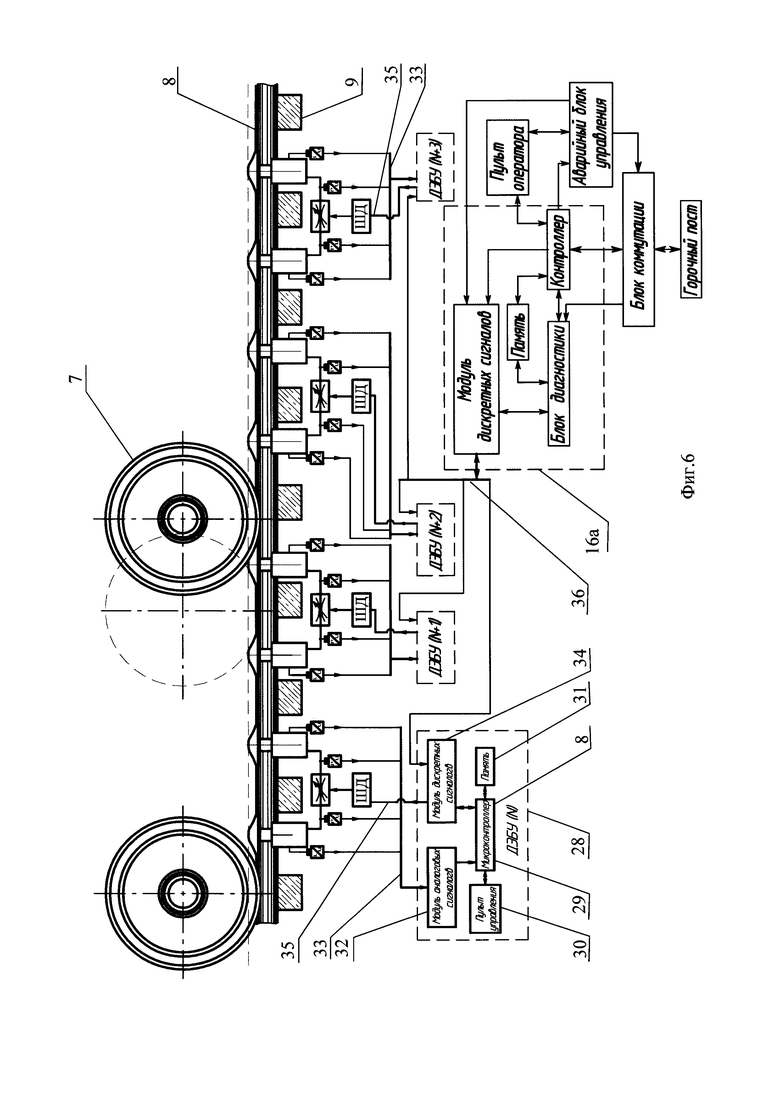
На фиг. 6 показана схема системы управления вагонным замедлителем по второму варианту системы.
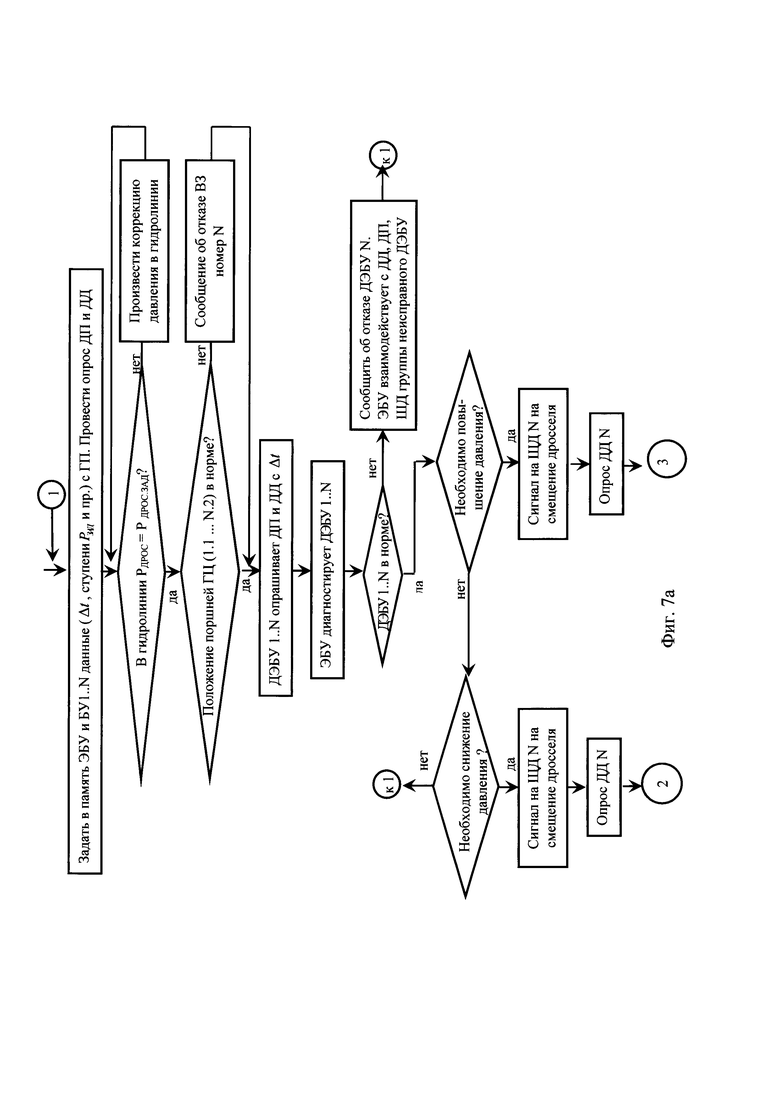
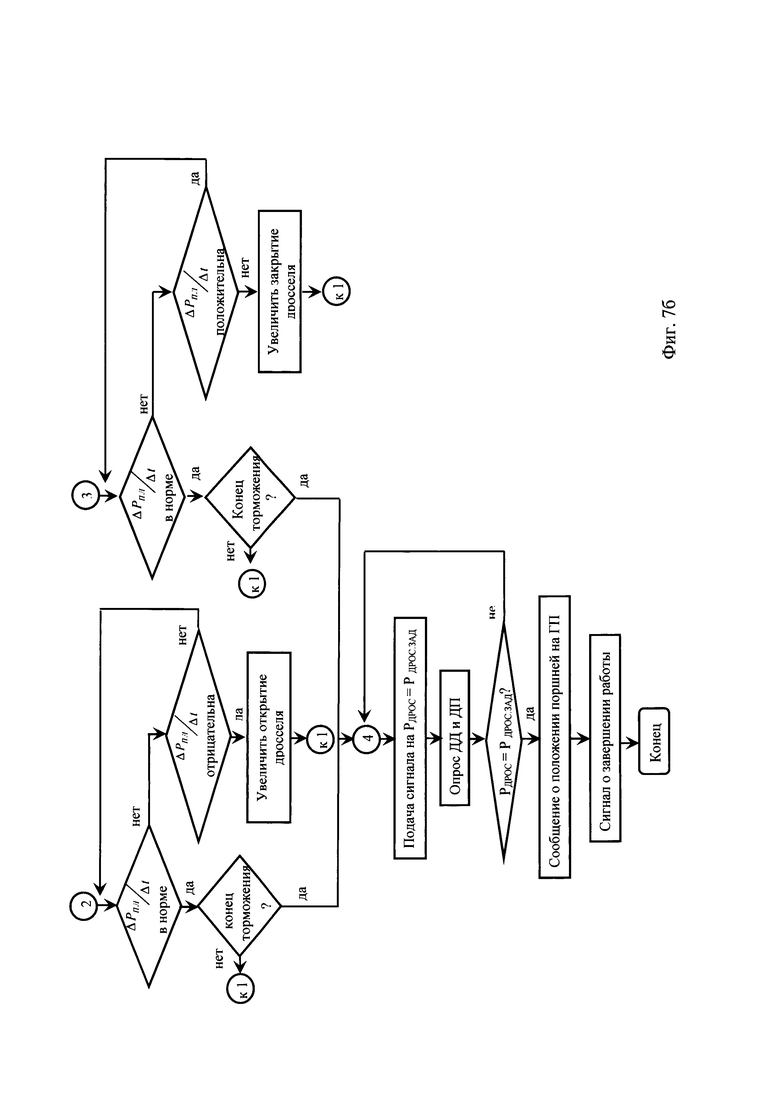
На фиг. 7а и 7б показан алгоритм функционирования системы управления вагонным замедлителем по второму варианту системы.
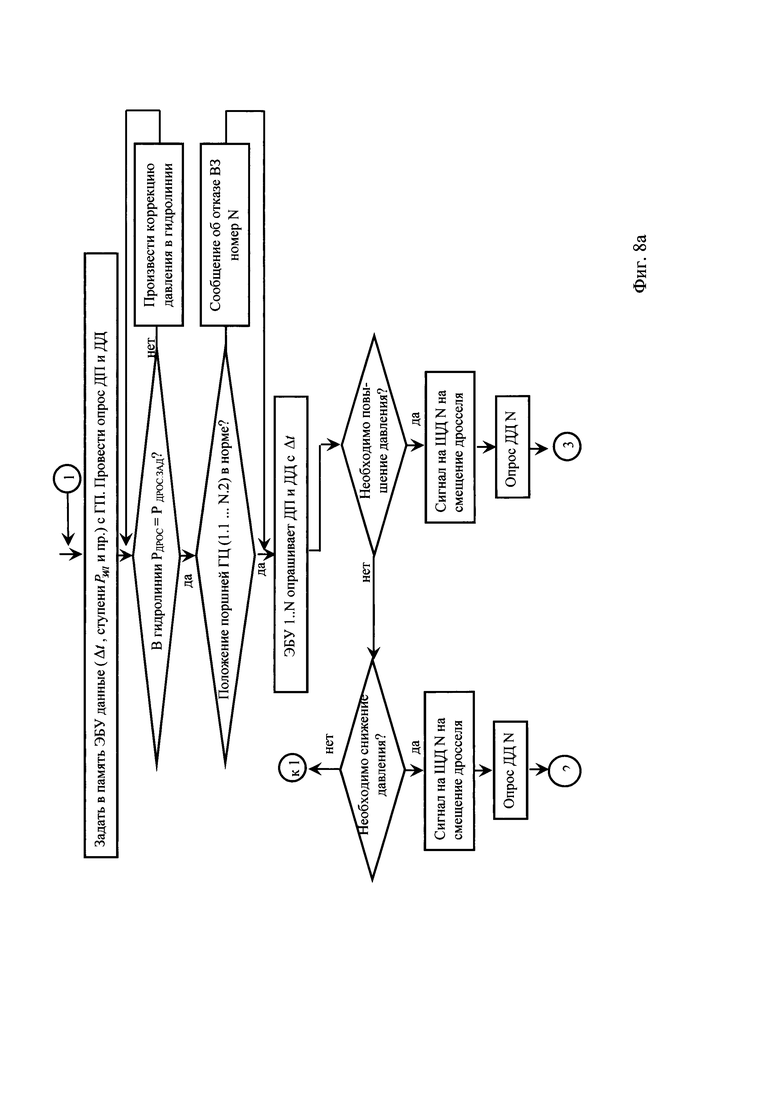
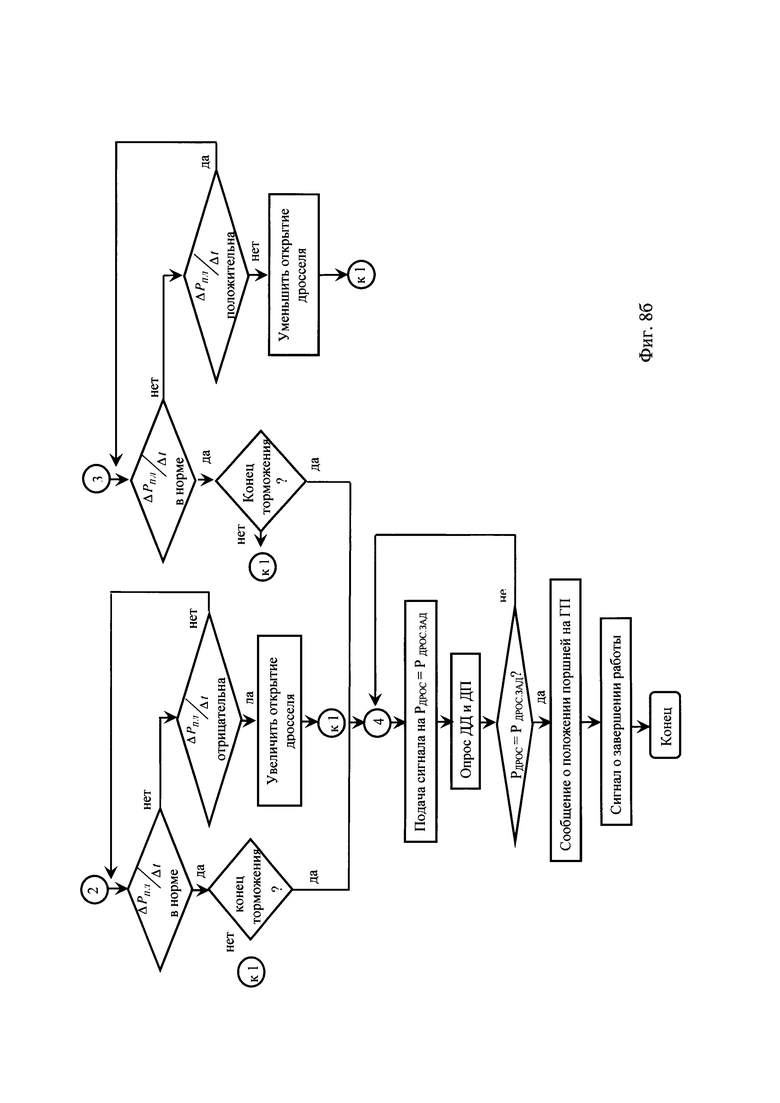
На фиг. 8а и 8б показан алгоритм функционирования системы управления вагонным замедлителем по первому варианту системы.
Обозначения, принятые на фиг. 1-8:
1 - гидроцилиндр (ГЦ);
2 - поршень ГЦ;
3 - шток ГЦ;
4 - корпус ГЦ;
5 - головка штока ГЦ;
6 - гребень колеса вагона;
7 - колесо вагона;
8 - рельс;
9 - шпалы;
10 - полость под поршнем 2 ГЦ 1;
11 - отверстие под штуцер в корпусе ГЦ;
12 - гидролиния, соединяющая полости 10 гидроцилиндров 1;
13 - регулируемый дроссель;
14 - управляемый электрический привод;
15а - датчик давления жидкости в гидролинии 12;
15б - датчик положения поршня 2 ГЦ 1;
16 - блок управления;
16а - электронный блок управления (ЭБУ);
17 - блок коммутации;
18 - контроллер ЭБУ 16а
19 - энергонезависимая память ЭБУ 16а;
20 - модуль аналоговых сигналов ЭБУ 16а;
21 - модуль дискретных сигналов ЭБУ 16а;
22 - шина, соединяющая модуль 20 аналоговых сигналов и датчики 15а, 15б;
23 - шина, соединяющая модуль 21 дискретных сигналов и электрические приводы 14;
24 - пульт оператора;
25 - горочный пост;
26 - блок диагностики ЭБУ 16а;
27 - аварийный блок управления;
28 - дополнительный электронный блок управления (ДЭБУ);
29 - микроконтроллер ДЭБУ 28;
30 - пульт управления ДЭБУ 28;
31 - энергонезависимая память ДЭБУ 28;
32 - модуль аналоговых сигналов ДЭБУ 28;
33 - шина, соединяющая модуль 32 аналоговых сигналов ДЭБУ 28 с датчиками 15а и 15б;
34 - модуль дискретных сигналов ДЭБУ 28;
35 - шина, соединяющая модуль 34 дискретных сигналов ДЭБУ 28 с электрическим приводом 14;
36 - шина, соединяющая модуль 34 ДЭБУ 28 с модулем 21 ЭБУ 16а;
Конструкция вагонного замедлителя имеет (фиг. 1-6): гидроцилиндры (ГЦ) 1 с поршнями 2 и штоками 3 в корпусах 4 гидроцилиндров 1, концы штоков 3 которых имеют головку 5 грибовидной формы для взаимодействия с гребнями 6 колес 7 вагона; установленные вдоль рельсового пути по два ГЦ 1 на расстоянии между их осями, определяемом по формуле:
Дг<В<А,
где А - расстояние между осями вагонной тележки,
В - расстояние между осями гидроцилиндров 1,
Дг - размер головки 5 штока 3 в направлении, параллельном рельсу 8;
корпус 4 каждого ГЦ 1, закрепленный на рельсе 8 между шпалами 9, с полостью 10 под поршнем 2 каждого ГЦ 1, заполненной рабочей жидкостью, с отверстием 11 под штуцер в корпусе 4 со стороны полости 10 под поршнем 2, при этом полости 10 смежных ГЦ 1 соединены между собой гидролинией 12, в которой установлен регулируемый дроссель 13 с управляемым электрическим приводом 14, а с обеих сторон дросселя 13 в гидролинии 12 установлены датчики 15а давления с электрическими выходами; каждый ГЦ 1 имеет датчик 15б положения поршня 2 с электрическими выходом; блок управления (БУ) 16, соединенный с электрическими выходами датчиками (15а, 15б и с управляемыми электрическими приводами 14 регулируемых дросселей 13.
Для повышения быстродействия системы управления вагонным замедлителем электропривод 14 регулируемого дросселя 13 является линейным или вращательным от шагового электродвигателя.
Для упрощения сенсорного устройства датчик 15б положения поршня 2 ГЦ 1 имеет магнитное кольцо, установленное на поршне 2, и установленные на корпусе ГЦ 1 датчики Холла, управляемые полем магнитного кольца.
Для повышения силы торможения и обеспечения ее двухстороннего действия на вагон пары гидроцилиндров 1 установлены на левом и правом рельсах 8.
По первому варианту система управления (фиг. 5) вагонным замедлителем вышеописанной конструкции имеет: блок 17 коммутации с блоком гальванических развязок и грозозащиты; электронный блок 16а управления (ЭБУ), включающий: контроллер 18, энергонезависимую память 19, соединенную с контроллером 18, модуль 20 аналоговых сигналов (MAC) и модуль 21 дискретных сигналов (МДС), соединенные с контроллером 18; шину 22, соединяющую с модулем 20 аналоговых сигналов датчики 156 положения поршня 2 и расположенные с обеих сторон дросселя 13 в гидролинии 12, соединяющей поршневые полости 10 гидроцилиндров 1, датчики 15а давления; шину 23, соединяющую модуль 21 дискретных сигналов ЭБУ 16а с электрическими приводами 14 управления дросселями 13 пар гидроцилиндров 1; пульт 24 оператора с интерфейсом, входы которого соединены через блок коммутации 17 с выходами управления от ГП 25; блок 26 диагностики, соединенный с блоком 17 коммутации, контроллером 18, энергонезависимой памятью 19, модулем 21 дискретных сигналов и модулем 20 аналоговых сигналов; аварийный блок 27 управления, подсоединенный к блоку 17 коммутации, контроллеру 18 и пульту 24 оператора, модуль 21 дискретных сигналов ЭБУ 16а соединен единой шиной 23 с электрическими приводами 14 управления дросселями 13 пар гидроцилиндров 1.
По второму варианту система (Фиг. 6) управления вагонным замедлителем вышеописанной конструкции имеет: блок коммутации 17 с блоком гальванических развязок и грозозащиты; электронный блок 16а управления, включающий контроллер 18, энергонезависимую память 19, соединенную с контроллером 18, модуль 20 аналоговых сигналов (MAC) и модуль 21 дискретных сигналов (МДС), соединенные с контроллером 18; каждая пара ГЦ 1, соединенных между собой через управляемый дроссель 13, имеет ДЭБУ 28, состоящий из микроконтроллера 29 и подключенных к нему пульта 30 управления с интерфейсом, энергонезависимой памяти 31, модуля 32 аналоговых сигналов, соединенного шиной 33 с датчиками 15а, давления и датчиками 15б положения поршня 2 каждого ГЦ 1, модуля 34 дискретных сигналов, соединенного с электрическим приводом 14 регулируемого дросселя 13; шину 35, соединяющую модуль 34 дискретных сигналов ДЭБУ 28 с электрическими приводами 14 управления регулируемыми дросселями 13 пар гидроцилиндров 1; при этом модули 34 дискретных сигналов каждого ДЭБУ 28 соединены шиной 36 с модулем 21 дискретных сигналов ЭБУ 16а; пульт оператора 24 с интерфейсом, входы которого соединены через блок коммутации 17 с выходами управления от горочного поста (ГП) 25; блок 26 диагностики, соединенный с блоком коммутации 17, контроллером 18, энергонезависимой памятью 19, модулем 21 дискретных сигналов; аварийный блок 27 управления, подсоединенный к блоку 17 коммутации, контроллеру 18 и пульту 24 оператора.
Для сортировочных горок, где преобладают вагонные отцепы небольшой (до 5 вагонов) протяженности, в большей степени актуален первый вариант системы, а для сортировочных горок, где вагонов в отцепах более 5, в большей степени подходит второй вариант системы. Это связано с обеспечением быстродействия регулирования блоком 16 управления вагонных замедлителей при ограниченном числе сигналов, принимаемых от датчиков (15 а, 15б) и выдаваемых блоком управления 16 на электрический привод 14 регулируемого дросселя 13.
Первый вариант способа управления вагонным замедлителем описанной выше конструкции реализуется с помощью первого варианта системы управления.
Первый вариант способа управления (фиг. 7а, 7б) вагонным замедлителем включает: получение электронным блоком 16а управления данных от ГП 25 о заданном уровне давления в гидроцилиндрах 1 привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления; получение электронным блоком 16а управления сигналов от набора датчиков 15а давления жидкости в гидролинии 12; подача управляющего сигнала от модуля 21 дискретных сигналов электронного блока 16а управления на электропривод 14 регулируемого дросселя 13 пары ГЦ 1 и отсчет времени от момента подачи этого сигнала осуществляются в соответствии с рабочей программой, записанной в его энергонезависимой памяти 19 в отдельном разделе; подача управляющего сигнала от модуля 21 дискретных сигналов ЭБУ 16а на электропривод 14 регулируемого дросселя 13 пары ГЦ 1 и отсчет времени от момента подачи данного сигнала до достижения в гидролиниях 12 давления ступени, заданной оператором; подача управляющего сигнала большей интенсивности на электропривод дросселя 13 пары ГЦ 1 в том случае, если за заданный интервал времени изменения положения поршня 2 ГЦ 1 не достигнута заданная скорость изменения давления в гидролиниях 12; контроль уровня давления, регистрируемого датчиками 15а давления жидкости в гидролинии 12, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП 25; регистрация датчиками давления через заданный интервал времени контроллером 18 электронного блока 16а управления уровня давления в гидролинии 12; поступление команды от ГП 25 на последующее изменение давления в гидролиниях 12, опрос и сохранение поступивших через модуль 20 аналоговых сигналов ЭБУ 16а данных от датчиков 15б положения поршня 2 ГЦ 1 и датчиков 15а давления, установленных в гидролиниях 12, после чего контроллер 18 ЭБУ 16а формирует управляющий сигнал на электропривод 14 регулируемого дросселя 13 пары ГЦ 1; задание временных интервалов измерения давления датчиками (15а и 15б) давления в гидролинии 12 и положения поршня 2 ГЦ 1 электронным блоком 16а управления отдельно для каждой пары ГЦ 1 или для пар ГЦ 1, установленных на левом и правом рельсах 8; корректировка шага смещения регулируемого дросселя 13 контроллером ЭБУ 16а в соответствии с данными, поступившими от датчиков 15б положения поршней ГЦ 1 и датчиков 15а давления в гидролиниях 12, а также сигналами, поступившими от ЭБУ 16а в соответствии указаниями рабочей программы, записанной в его энергонезависимой памяти 19; анализ и выявление состояния отказов вагонных замедлителей блоком 26 диагностики на основе показаний датчиков 15а давления в гидролиниях 12 и датчиков 15б положения поршней 2 ГЦ 1; передача данных о текущем состоянии вагонных замедлителей на ГП 25.
Второй вариант способа управления вагонным замедлителем описанной выше конструкции реализуется с помощью второго варианта системы управления.
Второй вариант способа управления (фиг. 8а, 8б) вагонным замедлителем включает: получение электронным блоком 16а управления данных от ГП 25 о заданном уровне давления в гидроцилиндрах 1 привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления; получение электронным блоком 16а управления данных от набора датчиков 15а давления в гидролинии 12; подача управляющего сигнала от модуля 21 дискретных сигналов электронного блока 16а управления на модуль 34 дискретных сигналов ДЭБУ 28 и отсчет времени от момента подачи этого сигнала, которые сохраняются в энергонезависимой памяти 31 ДЭБУ 28, обрабатываются микроконтроллером 29 ДЭБУ 28 в соответствии с рабочей программой, записанной в его энергонезависимой памяти 31, в отдельном разделе которой ДЭБУ 28 сохраняет поступившие через модуль 32 аналоговых сигналов данные от подключенных к ДЭБУ 28 датчиков положения поршней ГЦ 1 и датчиков давления, установленных в гидролинии 12, после чего микроконтроллер 29 ДЭБУ 28 формирует управляющий сигнал на электропривод 14 регулируемого дросселя 13 пары ГЦ 1 или пар ГЦ 1, установленных на левом и правом рельсах 8; подача управляющего сигнала от модуля 34 дискретных сигналов ДЭБУ на электропривод 14 регулируемого дросселя 13 пары ГЦ 1 или пар ГЦ 1, установленных на левом и правом рельсах 8, и отсчет времени от момента подачи данного сигнала до достижения в гидролинии 12 давления ступени, заданной оператором; подача ДЭБУ 28 управляющего сигнала большей интенсивности на электропривод 14 регулируемого дросселя 13 пары ГЦ 1 в том случае, если за заданный интервал времени на изменение положения поршней 2 ГЦ 1 не достигнута заданная скорость изменения давления в гидролинии 12; контроль уровня давления в гидролинии 12, регистрируемого датчиками 15а давления, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП 25; регистрация датчиками 15а давления через заданный интервал времени контроллером блока 16а управления уровня давления в гидролинии 12; поступление команды от ГП 25 на последующее изменение давления в гидролиниях 12, задание ДЭБУ 28 временных интервалов измерения давления датчиками 15а давления в гидролиниях 12 и датчиками 15б положения поршней 2 ГЦ 1 электронным блоком 16а управления отдельно для каждой пары ГЦ 1 или пар ГЦ 1, установленных на левом и правом рельсах 8; корректировка шага смещения дросселя 16 микроконтроллером 29 ДЭБУ 28 в соответствии с данными, поступившими от датчиков 15б положения поршней 2 ГЦ 1 и датчиков 15а давления в гидролинии 12, а также сигналами, поступившими от ЭБУ 16а в соответствии указаниями рабочей программы, записанной в его энергонезависимой памяти 31; анализ и выявление состояния отказов вагонных замедлителей блоком 26 диагностики на основе показаний датчиков 15а давления в гидролиниях 12 и датчиков 15б положения поршней 2 ГЦ 1; передача данных о текущем состоянии вагонных замедлителей на ГП 25.
Описанные примеры вариантов реализации изобретения вагонного замедлителя, систем и способов управления им показывают возможность решения общей технической задачи изобретения - обеспечения целесообразности применения вагонного замедлителя на сортировочных станциях с малыми вагонопотоками при достижении технических эффектов при применении вариантов систем и способов управления вагонным замедлителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ управления пневматическим приводом балочного вагонного замедлителя | 2023 |
|
RU2800782C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2023 |
|
RU2805430C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ТОЧЕЧНЫЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2023 |
|
RU2813574C1 |
| ЗАМЕДЛИТЕЛЬ ВАГОНОВ | 2003 |
|
RU2252885C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРУЖИННО-ГИДРАВЛИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2013 |
|
RU2550005C1 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 1991 |
|
RU2100235C1 |
Изобретение предназначено для использования на железнодорожном транспорте и относится к устройствам автоматики и телемеханики для управления вагонными замедлителями на сортировочных горках. Вагонный замедлитель имеет установленные вдоль рельсового пути гидроцилиндры (ГЦ) с поршнями и штоками в корпусе ГЦ, концы штоков которых имеют головку грибовидной формы для взаимодействия с гребнями колес вагона. Корпус каждого ГЦ закреплен на рельсе между шпалами. Полость под поршнем каждого ГЦ заполнена рабочей жидкостью. ГЦ выполнен с отверстием под штуцер в корпусе со стороны полости под поршнем, при этом полости смежных ГЦ соединены между собой гидролинией. Вагонный замедлитель имеет также блок управления (БУ), соединенный с датчиками и исполнительными элементами, установленными в гидролинии. В гидролинии, соединяющей полости ГЦ, установлен регулируемый дроссель с управляемым электрическим приводом, а с обеих сторон дросселя в гидролинии установлены датчики давления с электрическими выходами. Каждый ГЦ имеет датчик положения поршня с электрическими выходами. Каждый электропривод дросселя пары ГЦ соединен с БУ, управляющим по меньшей мере одним дросселем. К БУ подсоединены электрические выходы датчиков давления и датчиков положения поршня ГЦ. В изобретении также охарактеризованы системы управления вагонным замедлителем и способы управления вагонным замедлителем. В результате упрощается конструкция вагонного замедлителя, повышаются быстродействие системы управления и точность управления, повышается эффективность работы вагонного замедлителя на сортировочных горках с небольшим вагонопотоком. 5 н. и 4 з.п. ф-лы, 8 ил.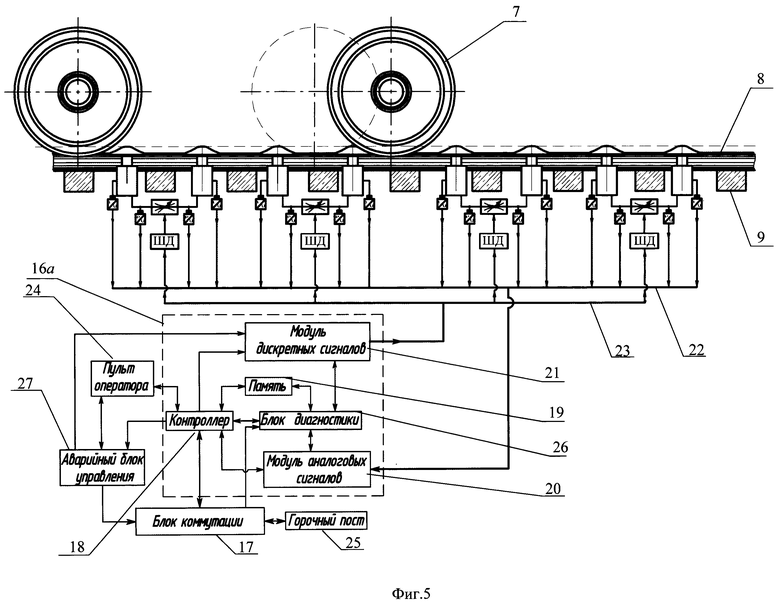
1. Вагонный замедлитель, имеющий установленные вдоль рельсового пути гидроцилиндры (ГЦ) с поршнями и штоками в корпусе ГЦ, концы штоков которых имеют головку грибовидной формы для взаимодействия с гребнями колес вагона, корпус каждого ГЦ, закрепленный на рельсе между шпалами, с полостью под поршнем каждого ГЦ, заполненной рабочей жидкостью, с отверстием под штуцер в корпусе со стороны полости под поршнем, при этом полости смежных ГЦ соединены между собой гидролинией, блок управления (БУ), соединенный с датчиками и исполнительными элементами, установленными в гидролинии, отличающийся тем, что в гидролинии, соединяющей полости ГЦ, установлен регулируемый дроссель с управляемым электрическим приводом, а с обеих сторон дросселя в гидролинии установлены датчики давления с электрическими выходами, каждый ГЦ имеет датчик положения поршня с электрическими выходами, каждый электропривод дросселя пары ГЦ соединен с БУ, управляющим по меньшей мере одним дросселем, при этом к БУ подсоединены электрические выходы датчиков давления и датчиков положения поршня ГЦ, два ГЦ установлены на расстоянии между их осями, определяемом по формуле:
Дг<В<А,
где А - расстояние между осями вагонной тележки,
В - расстояние между осями гидроцилиндров,
Дг - размер головки штока в направлении, параллельном рельсу.
2. Вагонный замедлитель по п. 1, отличающийся тем, что электропривод дросселя является линейным.
3. Вагонный замедлитель по п. 1, отличающийся тем, что электропривод дросселя имеет шаговый электродвигатель.
4. Вагонный замедлитель по п. 1, отличающийся тем, что датчик положения имеет магнитное кольцо, установленное на поршне, и установленные на корпусе ГЦ датчики Холла, управляемые полем магнитного кольца.
5. Вагонный замедлитель по любому из пп. 1-4, отличающийся тем, что пары гидроцилиндров установлены между шпалами на левом и правом рельсах.
6. Система управления вагонным замедлителем, выполненным по любому из пп. 1-5, имеющая блок коммутации с блоком гальванических развязок и грозозащиты, электронный блок управления (ЭБУ), включающий контроллер, энергонезависимую память, соединенную с контроллером, модуль аналоговых сигналов (MAC) и модуль дискретных сигналов (МДС), соединенные с контроллером, шину, соединяющую датчики с MAC, шину, соединяющую МДС с приводами управляемых элементов системы, пульт оператора с интерфейсом, входы которого соединены через блок коммутации с выходами управления от горочного поста (ГП), блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, МДС, аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту оператора, отличающаяся тем, что датчики положения поршня и датчики давления, расположенные с обеих сторон дросселя, соединены в единую шину, соединенную со входом MAC ЭБУ, МДС ЭБУ соединен единой шиной с электрическими приводами управления дросселями пар гидроцилиндров.
7. Система управления вагонным замедлителем, выполненным по любому из пп. 1-5, имеющая блок коммутации с блоком гальванических развязок и грозозащиты, ЭБУ, включающий контроллер, энергонезависимую память, соединенную с контроллером, MAC и МДС, соединенные с контроллером, дополнительный блок управления (ДЭБУ), шину, соединяющую датчики с MAC, шину, соединяющую МДС с приводами управляемых элементов системы, пульт оператора с интерфейсом, входы которого соединены через блок коммутации с выходами управления от ГП, шину, соединяющую MAC с датчиками давления, блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, МДС, аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту оператора, отличающаяся тем, что каждая пара ГЦ, соединенных между собой через управляемый дроссель, имеет ДЭБУ, состоящий из микроконтроллера и подключенных к нему энергонезависимой памяти, MAC, соединенного шиной с датчиками давления и датчиками положения каждого ГЦ, МДС, соединенного с электрическим приводом управляемого дросселя, при этом МДС каждого ДЭБУ соединены шиной с МДС ЭБУ.
8. Способ управления вагонным замедлителем, описанным в любом из пп. 1-5, с помощью системы управления по п. 6, включающий: получение ЭБУ данных от ГП о заданном уровне давления в гидроцилиндрах привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления, получение ЭБУ сигналов от набора датчиков давления, подачу управляющего сигнала от МДС ЭБУ на электропривод исполнительного элемента ГЦ и отсчет времени от момента подачи этого сигнала, контроль уровня давления, регистрируемого датчиками давления, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП, регистрация датчиками давления через заданный интервал времени контроллером ЭБУ уровня давления в гидролинии, поступление команды от ГП на последующее изменение давления в гидролиниях, отличающийся тем, что в процессе управления вагонным замедлителем системой управления осуществляется: подача управляющего сигнала от МДС ЭБУ осуществляется в соответствии с рабочей программой, записанной в его энергонезависимой памяти в отдельном разделе, на электропривод дросселя пары ГЦ, опрос и сохранение поступивших через MAC ЭБУ данных от датчиков положения поршня ГЦ и датчиков давления, установленных в гидролиниях, после чего контроллер ЭБУ формирует управляющий сигнал на электропривод дросселя пары ГЦ, подача управляющего сигнала от МДС ЭБУ на электропривод дросселя пары ГЦ и отсчет времени от момента подачи данного сигнала до достижения в гидролиниях давления ступени, заданной оператором, подача управляющего сигнала большей интенсивности на электропривод дросселя пары ГЦ в том случае, если за заданный интервал времени изменения положения поршня ГЦ не достигнута заданная скорость изменения давления в гидролиниях, задание временных интервалов измерения давления датчиками давления и положения поршня ГЦ ЭБУ отдельно для каждой пары ГЦ или для пар ГЦ, установленных на левом и правом рельсах, корректировка шага смещения дросселя контроллером ЭБУ в соответствии с данными, поступившими от датчиков положения поршней ГЦ и давления в гидролиниях, а также сигналами, поступившими от ЭБУ в соответствии с указаниями рабочей программы, записанной в его энергонезависимой памяти, анализ и выявление состояния отказов вагонных замедлителей блоком диагностики на основе показаний датчиков давления в гидролиниях и датчиков положения поршней ГЦ, передача данных о текущем состоянии вагонных замедлителей на ГП.
9. Способ управления вагонным замедлителем, описанным в любом из пп. 1-5, с помощью системы управления по п. 7, включающий: получение ЭБУ данных от ГП о заданном уровне давления в гидроцилиндрах привода вагонного замедлителя и интервала времени на достижение заданного максимального давления для данного интервала давления, получение ЭБУ данных от набора датчиков давления, подачу управляющего сигнала от МДС ЭБУ на электропривод исполнительного элемента ГЦ и отсчет времени от момента подачи этого сигнала, контроль уровня давления, регистрируемого датчиками давления, и регистрация времени достижения максимального давления, ступень которого задана оператором ГП, регистрация датчиками давления через заданный интервал времени контроллером ЭБУ уровня давления в гидролинии, поступление команды от ГП на последующее изменение давления в гидролиниях, отличающийся тем, что в процессе управления вагонным замедлителем системой управления осуществляется: подача управляющего сигнала от МДС ЭБУ на МДС ДЭБУ, которые сохраняются в энергонезависимой памяти ДЭБУ, обрабатываются микроконтроллером ДЭБУ в соответствии с рабочей программой, записанной в его энергонезависимой памяти, в отдельном разделе которой ДЭБУ сохраняет поступившие через MAC данные от подключенных к ДЭБУ датчиков положения поршней ГЦ и датчиков давления, установленных в гидролинии, после чего микроконтроллер ДЭБУ формирует управляющий сигнал на электропривод дросселя пары ГЦ или пар ГЦ, установленных на левом и правом рельсах, подача управляющего сигнала от МДС ДЭБУ на электропривод дросселя пары ГЦ или пар ГЦ, установленных на левом и правом рельсах, и отсчет времени от момента подачи данного сигнала до достижения в гидролинии давления ступени, заданной оператором, подача ДЭБУ управляющего сигнала большей интенсивности на электропривод дросселя пары ГЦ в том случае, если за заданный интервал времени на изменение положения поршней ГЦ не достигнута заданная скорость изменения давления в гидролинии, задание ДЭБУ временных интервалов измерения давления датчиками давления и положения поршней ГЦ ЭБУ отдельно для каждой пары ГЦ или пар ГЦ, установленных на левом и правом рельсах, корректировка шага смещения дросселя микроконтроллером ДЭБУ в соответствии с данными, поступившими от датчиков положения поршней ГЦ и давления в гидролинии, а также сигналами, поступившими от ЭБУ в соответствии с указаниями рабочей программы, записанной в его энергонезависимой памяти, анализ и выявление состояния отказов вагонных замедлителей блоком диагностики на основе показаний датчиков давления в гидролиниях и датчиков положения поршней ГЦ, передача данных о текущем состоянии вагонных замедлителей на ГП.
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ, СНАБЖЕННЫЙ ПО МЕНЬШЕЙ МЕРЕ ОДНИМ ВЕРТИКАЛЬНО ПОДВИЖНЫМ ТОРМОЗНЫМ ЭЛЕМЕНТОМ, А ТАКЖЕ СПОСОБ ОПРЕДЕЛЕНИЯ ЕГО ТЕКУЩЕГО ПОЛОЖЕНИЯ | 2012 |
|
RU2564299C2 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ДЛЯ НЕГО | 2011 |
|
RU2487033C2 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| DE 19921649 A, 23.11.2000. | |||
