ОБЛАСТЬ ТЕХНИКИ
[0001] Варианты осуществления настоящего изобретения относятся к устройству ультразвукового контроля с линейным сканированием и к способу ультразвукового контроля с линейным сканированием.
УРОВЕНЬ ТЕХНИКИ
[0002] Технология ультразвукового контроля (ultrasonic testing - UT) может подтвердить, неразрушающим способом, является ли структура бездефектной как снаружи, так и внутри, и поэтому она стала технологией, необходимой в различных технических областях. Ультразвуковой контроль методом фазированных решеток (phased array ultrasonic testing - PAUT) находит широкое применение в промышленности. В PAUT обеспечиваются пьезоэлектрические элементы, которые используются в качестве малых ультразвуковых элементов для передачи и приема ультразвуковых волн, и они передают ультразвуковые волны в течение разных интервалов времени, задерживаемых друг относительно друга, для генерирования посредством этого волн, имеющих заданную форму волны. В отличие от контроля с использованием монокулярного зонда, ультразвуковой контроль методом фазированных решеток может сканировать одномоментно широкую область под множеством углов, или сканировать контролируемый объект, имеющий сложную форму. Следовательно, ультразвуковой контроль методом фазированных решеток является очень предпочтительным тем, что могут быть уменьшены требуемые трудозатраты в человеко-часах.
[0003] При линейном сканировании, для обеспечения возбуждения, элементы сканируются электронным способом, в то время как фазированная решетка формирует ультразвуковой луч в конкретном направлении. При линейном сканировании, чем больше каналов имеет решеточный зонд, тем большую область изображения получают в направлении глубины посредством линейного сканирования, и тем более точно будет оценено изображение.
[0004] Однако, если решеточный зонд имеет малое число элементов, вследствие, например, ограниченного установочного положения зонда, то линейное сканирование не может обеспечить линейно-сканируемое изображение, которое является достаточно большим для оценивания. Таким образом, в главной цепи используется секторное сканирование передающих лучей при сканировании решеточного зонда в веерообразной плоскости. В случае секторного сканирования, скорость звука изменяется согласно углу лучевого сканирования, если материал объекта имеет анизотропию. Следовательно, линейное сканирование может быть эффективным в некоторых случаях, поскольку измерение возможно при одном и том же угле.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Фиг. 1 является блок-схемой, показывающей конфигурацию устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0006] Фиг. 2 является видом в перспективе, показывающим конфигурацию приводного устройства решеточного зонда, используемого в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0007] Фиг. 3 является продольным разрезом иллюстративного блока приобретения форм устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0008] Фиг. 4 является видом сбоку иллюстративного блока приобретения форм устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0009] Фиг. 5 является блок-схемой последовательности операций, показывающей последовательность операций ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0010] Фиг. 6 является продольным разрезом, показывающим первую комбинацию контролируемого объекта, имеющего форму плоской пластины, и ультразвукового решеточного зонда устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0011] Фиг. 7 является продольным разрезом, показывающим вторую комбинацию контролируемого объекта, имеющего форму плоской пластины, и ультразвукового решеточного зонда устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0012] Фиг. 8 является продольным разрезом, показывающим третью комбинацию контролируемого объекта, имеющего форму плоской пластины, и ультразвукового решеточного зонда устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0013] Фиг. 9 показывает, как ультразвуковые волны передаются и принимаются согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 9 показывает блок-схему, а правая сторона показывает сигналы, принимаемые каждым ультразвуковым элементом, когда ультразвуковой сигнал отправляется первым ультразвуковым элементом.
[0014] Фиг. 10 показывает, как ультразвуковые волны передаются и принимаются согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 10 показывает блок-схему, а правая сторона показывает сигналы, принимаемые каждым ультразвуковым элементом, когда ультразвуковой сигнал отправляется вторым ультразвуковым элементом.
[0015] Фиг. 11 показывает, как ультразвуковые волны передаются и принимаются согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 11 показывает блок-схему, а правая сторона показывает сигналы, принимаемые каждым ультразвуковым элементом, когда ультразвуковой сигнал отправляется N-ым ультразвуковым элементом.
[0016] Фиг. 12 показывает, как ультразвуковая волна передается и принимается ультразвуковым решеточным зондом согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 12 показывает блок-схему, а правая сторона является схемой формы волны части эхо-волны.
[0017] Фиг. 13 является схемой формы волны, объясняющей время задержки, когда ультразвуковая волна отправляется и принимается согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0018] Фиг. 14 является схемой формы волны, показывающей форму эхо-волны, синтезируемую в способе ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0019] Фиг. 15 является концептуальным продольным разрезом для объяснения направления, в котором ультразвуковые волны распространяются устройством ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0020] Фиг. 16 является продольно-глубинным ультразвуковым контрольным изображением, которое является иллюстративным результатом ультразвукового контроля, который был выполнен устройством ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0021] Фиг. 17 является концептуальным продольным разрезом, объясняющим, как изображения интегрируются, когда информационные данные о форме поверхности контролируемого объекта приобретаются в двух установочных положениях ультразвукового решеточного зонда.
[0022] Фиг. 18 является блок-схемой, объясняющей функцию регулятора области перекрытия.
[0023] Фиг. 19 является концептуальным продольным разрезом, иллюстрирующим, как ультразвуковые волны распространяются, когда информационные данные о форме поверхности контролируемого объекта приобретаются в двух установочных положениях ультразвукового решеточного зонда.
[0024] Фиг. 20 является концептуальным продольным разрезом, объясняющим первый способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0025] Фиг. 21 является концептуальным продольным разрезом, объясняющим второй способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0026] Фиг. 22 является концептуальным продольным разрезом, объясняющим третий способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0027] Фиг. 23 является концептуальным продольным разрезом, объясняющим четвертый способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0028] Фиг. 24 является концептуальным продольным разрезом, объясняющим пятый способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0029] Фиг. 25 является концептуальным продольным разрезом, объясняющим первый способ ультразвукового контроля для контроля контролируемого объекта, имеющего криволинейную поверхность, с использованием устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0030] Фиг. 26 является концептуальным продольным разрезом, объясняющим второй способ ультразвукового контроля для контроля контролируемого объекта, имеющего криволинейную поверхность, с использованием устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0031] Фиг. 27 является блок-схемой, показывающей конфигурацию устройства ультразвукового контроля с линейным сканированием согласно второму варианту осуществления.
[0032] Фиг. 28А показывает продольно-глубинное контрольное изображение, включающее в себя поперечное сечение в направлении x-z.
[0033] Фиг. 28В показывает широтно-глубинное контрольное изображение Gyza, которое включает в себя синтезированную форму М волны, существующую в части продольно-глубинного изображения Gxza, и которое параллельно оси y.
[0034] Фиг. 28С показывает широтно-глубинное контрольное изображение Gyzb, которое включает в себя синтезированную форму М волны, существующую в части продольно-глубинного контрольного изображения Gxzb, и которое параллельно оси y.
[0035] Фиг. 29A, 29B и 29C являются концептуальными видами, объясняющими продольно-глубинное и широтно-глубинное контрольные изображения второго примера.
[0036] Фиг. 30 является концептуальным видом в перспективе, показывающим сопло, используемое в устройстве ультразвукового контроля с линейным сканированием согласно этому варианту осуществления.
[0037] Фиг. 31 является концептуальным видом, объясняющим, как сопло проверяется в его круговом направлении.
[0038] Фиг. 32 является концептуальным видом, объясняющим, как ультразвуковой решеточный зонд перемещают в аксиальном направлении сопла.
ПОДРОБНОЕ ОПИСАНИЕ
[0039] Задачей настоящего изобретения является обеспечение линейного сканирования в широком диапазоне.
[0040] Согласно одному аспекту настоящего изобретения, обеспечено устройство ультразвукового контроля с линейным сканированием, содержащее: ультразвуковой решеточный зонд, имеющий множество ультразвуковых элементов, выровненных в первом направлении, причем каждый из ультразвуковых элементов выполнен с возможностью передачи ультразвуковой волны в контролируемый объект и приема ультразвуковой волны; вычислитель времени задержки, выполненный с возможностью вычисления, относительно формы поверхности контролируемого объекта, значений времени задержки по меньшей мере одного из передачи и приема ультразвуковой волны каждым из ультразвуковых элементов; регулятор области перекрытия, выполненный с возможностью установления условий для генерирования изображения области перекрытия между первым установочным положением зонда и вторым установочным положением зонда ультразвукового решеточного зонда, причем второе установочное положение зонда сдвинуто в первом направлении относительно первого установочного положения зонда; и генератор интегрированного изображения, выполненный с возможностью генерирования первых данных изображения области, включающей в себя область перекрытия, причем первые данные изображения продолжаются в первом направлении и направлении глубины контролируемого объекта, причем регулятор области перекрытия выполнен с возможностью установления условий формы поверхности, обозначаемых для вычислителя времени задержки при вычислении значений времени задержки либо в первом установочном положении зонда, либо во втором установочном положении зонда, в качестве как первой приобретенной формы, получаемой в первом установочном положении зонда, так и второй приобретенной формы, получаемой во втором установочном положении зонда.
[0041] Согласно другому аспекту настоящего изобретения, обеспечен способ ультразвукового контроля с линейным сканированием, содержащий: этап приобретения первых контрольных данных, на котором запоминают в запоминающем устройстве первые контрольные данные, получаемые ультразвуковым решеточным зондом, имеющим множество ультразвуковых элементов, в первом установочном положении зонда на поверхности контролируемого объекта; этап приобретения вторых контрольных данных, на котором запоминают в запоминающем устройстве вторые контрольные данные, получаемые ультразвуковым решеточным зондом во втором установочном положении зонда, включающем в себя область перекрытия, перекрывающую первое установочное положение зонда в первом направлении вдоль поверхности контролируемого объекта; этап установления условий, на котором устанавливают в регуляторе области перекрытия условия генерирования данных изображения для области перекрытия; и этап генерирования данных изображения, на котором генерируют с использованием генератора интегрированного изображения контрольные данные изображения, соответствующие первому установочному положению зонда и второму установочному положению зонда, включающему в себя область перекрытия, на основе первых ультразвуковых контрольных данных, вторых ультразвуковых контрольных данных и условий, причем этап генерирования данных изображения включает в себя этап вычисления времени задержки, на котором вычисляют с использованием вычислителя времени задержки значения времени задержки по меньшей мере одного из передачи ультразвуковой волны к контролируемому объекту и приема ультразвуковой волны каждым из ультразвуковых элементов, относительно формы поверхности контролируемого объекта; и этап установления условий включает в себя этап, на котором устанавливают условия формы поверхности, обозначаемые для вычислителя времени задержки при вычислении значений времени задержки либо в первом установочном положении зонда, либо во втором установочном положении зонда, в качестве как первой приобретенной формы, получаемой в первом установочном положении зонда, так и второй приобретенной формы, получаемой во втором установочном положении зонда.
[0042] Далее со ссылкой на сопутствующие чертежи будут описаны варианты осуществления устройства ультразвукового контроля с линейным сканированием и способа ультразвукового контроля с линейным сканированием. Одинаковые или подобные элементы представлены одинаковыми ссылочными позициями и не будут описываться повторно.
(Первый вариант осуществления)
[0043] Фиг. 1 является блок-схемой, показывающей конфигурацию устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Устройство 100 ультразвукового контроля с линейным сканированием имеет ультразвуковой решеточный зонд 10, приводное устройство 80 решеточного зонда, блок 90 приобретения форм, и консоль 110 мониторинга. Ультразвуковой решеточный зонд 10 и консоль 110 мониторинга соединены линией 10а передачи сигналов. Блок 90 приобретенной форм соединен с входом 70 консоли 110 мониторинга. Устройство 100 ультразвукового контроля с линейным сканированием используется для детектирования дефекта 2 в контролируемом объекте 1 неразрушающим способом.
[0044] Ультразвуковой решеточный зонд 10 имеет множество ультразвуковых элементов 11 (N элементов) и удерживающий блок 12, удерживающий ультразвуковые элементы 11. Ультразвуковые элементы 11 выровнены и линейно расположены в продольном направлении с продольными заданными интервалами между ними. Здесь, направление выравнивания множества ультразвуковых элементов 11 называется продольным направлением или направлением длины.
[0045] Ультразвуковые элементы 11 являются пьезоэлектрическими элементами, изготовленными из керамики, композиционного материала, или любого другого материала, который способен генерировать ультразвуковые волны посредством пьезоэлектрического эффекта. Альтернативно, ультразвуковые элементы 11 могут быть пьезоэлектрическими элементами, изготовленными из высокомолекулярной пленки, или могут быть механизмом для генерирования ультразвуковых волн. Дополнительно, ультразвуковые элементы 11 могут иметь ослабляющий элемент для ослабления ультразвуковых волн, и переднюю пластину, часть которой или вся она расположена на передающей поверхности. Ультразвуковые элементы 11, в общем, известны как «ультразвуковые зонды».
[0046] Ультразвуковые элементы 11 не только генерируют ультразвуковые волны при приложении разности потенциалов, но и генерируют сигналы напряжения при приеме ультразвуковой волны. Таким образом, ультразвуковые элементы 11 имеют функцию передачи и приема ультразвуковых волн. Ультразвуковые элементы 11, таким образом, выполнены с возможностью передачи ультразвуковой волны к контролируемому объекту 1 и приема ультразвуковой волны.
[0047] Ультразвуковой решеточный зонд 10, описанный выше, имеет ультразвуковые элементы 11, которые расположены в одномерной решетке. Однако расположение ультразвуковых элементов этим не ограничено. Например, расположение ультразвуковых элементов может обеспечивать 1,5-мерный решеточный зонд, в котором пьезоэлектрические элементы имеют разные ширины в направлении глубины линейного решеточного зонда, матричный решеточный зонд, в котором пьезоэлектрические элементы расположены в двух направлениях, круговой решеточный зонд, в котором пьезоэлектрические элементы расположены концентрически по отношению друг к другу, разделенный круговой решеточный зонд, образованный посредством разделения пьезоэлектрических элементов кругового решеточного зонда в круговом направлении, неоднородный решеточный зонд, имеющий пьезоэлектрические элементы в неоднородной структуре, дуговой решеточный зонд, в котором пьезоэлектрические элементы расположены вдоль дуги, или сферический решеточный зонд, в котором пьезоэлектрические элементы расположены на поверхности сферы.
[0048] Кроме того, некоторые из этих различных решеточных зондов могут быть выбраны и объединены для так называемого тандемного ультразвукового контроля. Различные решеточные зонды, описанные выше, включают в себя решеточные зонды, подлежащие использованию в воздухе и воде при хорошем уплотнении посредством герметизации или заключения в корпус.
[0049] Для контроля контролируемого объекта 1, среду 5 распространения звука, также называемую «клином», размещают между ультразвуковым решеточным зондом 10 и контролируемым объектом 1. Среда 5 распространения звука используется для передачи ультразвуковых волн к контролируемому объекту 1 под углом с высокой направленностью. Такие изотропные материалы, которые могут направлять ультразвуковые волны и имеют детектируемое акустическое полное сопротивление, используются в качестве среды 5 распространения звука. Среда 5 распространения звука может не использоваться, например, в случае, когда контролируемый объект 1 имеет плоские поверхности.
[0050] В качестве изотропной среды 5 распространения звука пригодны такие материалы, как акрил, полиимид, гель или другое высокомолекулярное вещество. Такой материал, имеющий акустическое полное сопротивление, подобное или равное акустическому полному сопротивлению материала передней пластины (не показана) каждого ультразвукового элемента 11, или материал, имеющий акустическое полное сопротивление, подобное или равное акустическому полному сопротивлению материала контролируемого объекта 1, может быть использован в качестве среды 5 распространения звука. Дополнительно, такой материал, имеющий акустическое полное сопротивление, которое изменяется постепенно или пошагово, может быть использован в качестве среды 5 распространения звука.
[0051] Кроме того, для предотвращения влияния множественных отраженных волн в среде 5 распространения звука на результат ультразвукового контроля, среда 5 распространения звука может иметь ослабляющие элементы, расположенные внутри или снаружи, может иметь волнистую форму для устранения волн, или может иметь механизм уменьшения множественных отражений. В некоторых случаях, среда 5 распространения звука не показана на фигурах, показывающих, как ультразвуковые волны передаются от ультразвукового решеточного зонда 10 к контролируемому объекту 1.
[0052] Акустическая контактная среда (не показана) используется на соединениях пути, продолжающегося от ультразвукового решеточного зонда 10 к контролируемому объекту 1. А именно, акустическая контактная среда используется на соединении ультразвукового решеточного зонда 10 и среды 5 распространения звука и на соединении среды 5 распространения звука и контролируемого объекта 1. Если среда 5 распространения звука не используется, то акустическая контактная среда применяется на соединении между ультразвуковым решеточным зондом 10 и контролируемым объектом 1. Акустическая контактная среда является веществом, которое может распространять ультразвуковые волны, таким как вода, глицерин, индустриальное масло, касторовое масло, акрил, полистирол, или гель.
[0053] Фиг. 2 является видом в перспективе, показывающим конфигурацию приводного устройства решеточного зонда, используемого в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. На фиг. 2, блок 90 приобретения форм не показан.
[0054] Ультразвуковой решеточный зонд 10 устройства 100 ультразвукового контроля с линейным сканированием размещают на контролируемом объекте 1. Приводное устройство 80 решеточного зонда приводит в движение ультразвуковой решеточный зонд 10. Приводное устройство 80 решеточного зонда удерживает устройство 100 ультразвукового контроля с линейным сканированием в заданном положении для детектирования дефекта, при наличии, в контролируемом объекте 1. Для контроля дефектов в нескольких заданных положениях, ультразвуковой решеточный зонд 10 перемещают вдоль заданных положений. Когда ультразвуковой решеточный зонд 10 перемещается, ультразвуковые волны не передаются и не принимаются.
[0055] Приводное устройство 80 решеточного зонда имеет приводной вал 82, первое средство 83 поддержки, первый поддерживающий приводной вал 83а, первый поддерживающий привод 83b, второе средство 84 поддержки, второй поддерживающий приводной вал 84а, второй поддерживающий привод 84b, и раму 81, поддерживающую эти компоненты.
[0056] Здесь для объяснения установлены оси координат. А именно, продольное направление (т.е. направление выравнивания множества ультразвуковых элементов 11 в ультразвуковом решеточном зонде 10) ультразвукового решеточного зонда 10 является направлением х (первым направлением), направление глубины от ультразвукового решеточного зонда 10 по направлению к контролируемому объекту 1 является направлением z, и направление, перпендикулярное направлениям х и z, является направлением y (вторым направлением). Нижеследующее описание основано на случае, когда контролируемый объект 1 расположен таким образом, что одна из его широких поверхностей расположена вдоль плоскости x-y.
[0057] Ультразвуковой решеточный зонд 10 соединен через подушку 82а с одним концом приводного вала 82, продолжающегося в направлении z. Подушка 82а может не использоваться, если приводной вал 82 может быть прямо соединен с ультразвуковым решеточным зондом 10. Приводной вал 82 поддерживается и удерживается в направлениях x и y у части, где первое средство 83 поддержки, продолжающееся в направлении x, и второе средство 84 поддержки, продолжающееся в направлении y, пересекаются друг с другом. Приводной вал 82 может перемещаться в аксиальном направлении, т.е. в направлении z.
[0058] Первое средство 83 поддержки может быть перемещено первым поддерживающим приводом 83b посредством первого поддерживающего приводного вала 83а, имеющего форму, подобную стержню, и продолжающегося в направлении y. Второе средство 84 поддержки может быть перемещено вторым поддерживающим приводом 84а посредством второго поддерживающего приводного вала 84а, имеющего форму, подобную стержню, и продолжающегося в направлении x. Первое средство 83 поддержки и второе средство 84 поддержки могут скользить в положении, где они пересекаются друг с другом. Альтернативно, первое средство 83 поддержки и второе средство 84 поддержки могут перемещаться параллельно друг другу при удерживании положения, в котором они пересекаются друг с другом.
[0059] Как показано на фиг. 1, консоль 110 мониторинга имеет секцию 20 приема/передачи, вычислитель 30, запоминающее устройство 40, контроллер 50, дисплей 60 и вход 70.
[0060] Секция 20 приема/передачи имеет средство 21 приложения напряжения, переключатели 22 и аналого-цифровой преобразователь 23. Средство 21 приложения напряжения прикладывает разность потенциалов к ультразвуковым элементам 11 для подачи посредством этого электроэнергии на ультразвуковые элементы 11.
[0061] Согласно команде, поступающей от контроллера 50, переключатели 22 соединяют один или несколько ультразвуковых элементов 11 со средством 21 приложения напряжения или отсоединяют один или несколько ультразвуковых элементов 11 от средства 21 приложения напряжения. А именно, переключатели 22 переключают каждый ультразвуковой элемент 11 из состояния, в котором разность потенциалов приложена, в состояние, в котором разность потенциалов не приложена, или наоборот. Если один ультразвуковой элемент 11 передает ультразвуковую волну, в то время как каждый из ультразвуковых элементов 11 принимает отраженную волну и ослабляет принятую волну, то эта волна может быть отличена от ультразвуковой волны, передаваемой следующим ультразвуковым элементом 11. Когда ультразвуковой решеточный зонд 10 остается удерживаемым в конкретном положении, переключение каждого ультразвукового элемента 11 переключателями 22 может быть автоматически выполнено электронной схемой. Если ультразвуковые элементы 11 передают волны с интервалами около 0,1 секунды, то их время передачи-приема в положении ультразвукового решеточного зонда 10 составляет около 2 секунд в случае, когда N=20.
[0062] Аналого-цифровой преобразователь 23 принимает сигналы (т.е. эхо-сигналы) от ультразвуковых элементов 11, преобразует эти сигналы в цифровые данные и выводит цифровые данные в виде данных форм ультразвуковых волн в запоминающее устройство 40.
[0063] Средство 21 приложения напряжения имеет функцию приложения разности потенциалов (т.е. напряжения) с произвольной формой волны к ультразвуковым элементам 11, которые были включены переключателями 22. Приложенное напряжение имеет форму волны, такую как синусоидальная форма волны, пилообразная форма волны, прямоугольная форма волны или форма волны с пичками-импульсами. Напряжение может быть биполярным и иметь как положительное значение, так и отрицательное значение, или может быть униполярным и иметь либо положительное значение, либо отрицательное значение. Дополнительно, положительный сдвиг или отрицательный сдвиг может быть добавлен к напряжению. Форма волны может быть единственным импульсом, пачкой импульсов или непрерывной волной. Интервал времени приложения напряжения и число повторных приложений напряжения могут быть увеличены или уменьшены.
[0064] Вычислитель 30 имеет вычислитель 31 установочного положения, вычислитель 32 формы поверхности, вычислитель 33 времени задержки, синтезирующий вычислитель 34, генератор 35 интегрированного изображения и регулятор 36 области перекрытия. Вычислитель 30, также как и вычислитель 31 установочного положения, вычислитель 32 формы поверхности, вычислитель 33 времени задержки, синтезирующий вычислитель 34, генератор 35 интегрированного изображения, и/или регулятор 36 области перекрытия может быть выполнен в виде любых схем, в том числе, но не только, интегральных схем (IC), LSI, процессоров или FPGA, или компьютера, содержащего процессор, память, запоминающее устройство и интерфейс, такого как персональный компьютер (PC), который может выполнять различные операции и осуществлять передачу данных.
[0065] Вычислитель 31 установочного положения вычисляет относительные положения контролируемого объекта 1 и ультразвукового решеточного зонда 10. Упомянутые относительные положения являются положениями, в которых контролируемый объект 1 и ультразвуковой решеточный зонд 10 находятся друг относительно друга. Более конкретно, они определяются расстояниями между контролируемым объектом 1 и ультразвуковым решеточным зондом 10, измеряемыми в направлениях x, y и z (фиг. 2), причем направление x является продольным направлением решеточного зонда 10, или определяются разностями между углами, под которыми контролируемый объект 1 и ультразвуковой решеточный зонд 10 повернуты относительно каждой из осей x, y и z.
[0066] Информационные данные об установочном положении, такие как данные о координатах или разности углов, запоминаются в устройстве 41 хранения данных обработанных сигналов или устройстве 42 хранения данных установочных положений запоминающего устройства 40 (что будет описано ниже). Вычислитель 31 установочного положения считывает информационные данные об установочном положении из этих запоминающих устройств и вычисляет относительные положения контролируемого объекта 1 и ультразвукового решеточного зонда 10.
[0067] Вычислитель 32 формы поверхности вычисляет форму поверхности контролируемого объекта 1 вблизи ультразвукового решеточного зонда 10. Вычислитель 32 формы поверхности должен приобретать данные извне для вычисления формы поверхности контролируемого объекта 1.
[0068] Источник данных, из которого вычислитель 32 формы поверхности приобретает данные для вычисления формы поверхности контролируемого объекта 1, в основном похож на источник данных, из которого приобретает данные вычислитель 31 установочного положения. А именно, первые данные являются информационными данными о форме, приобретаемыми блоком 90 приобретения форм и запоминаемыми в устройстве 42 хранения данных установочных положений запоминающего устройства 40. Вторые данные являются данными о поверхности-волне, содержащимися в цифровых данных о форме ультразвуковой волны (а именно, данных о форме эхо-сигнала), запоминаемых в устройстве 41 хранения данных обработанных сигналов. Вычислитель 32 формы поверхности использует первые данные или вторые данные, или и то, и другое, и вычисляет приобретенную форму, которая является формой поверхности контролируемого объекта 1.
[0069] Фиг. 3 является продольным разрезом иллюстративного блока приобретения форм устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Блок 90 приобретения форм используется для приобретения данных, представляющих форму поверхности контролируемого объекта 1, и данных, представляющих позиционное соотношение между контролируемым объектом 1 и ультразвуковым решеточным зондом 10.
[0070] Фиг. 4 является видом сбоку иллюстративного блока приобретения форм устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Фиг. 3 и фиг. 4 иллюстрируют случай, когда блок 90 приобретения форм имеет две камеры 8, прикрепленные к одному концу удерживающего блока 12 ультразвукового решеточного зонда 10. Сигналы изображения, выводимые из камер 8, принимаются входом 70 консоли 110 мониторинга и запоминаются в устройстве 42 хранения данных установочных положений.
[0071] Число используемых камер 8 не ограничено двумя. Может быть использована только одна камера, или могут быть использованы три или более камер. Дополнительно, камеры 8 могут быть расположены в любой другой части удерживающего блока 12, например, на приводном валу 82 приводного устройства 80 решеточного зонда, или в любой другой части приводного устройства 80 решеточного зонда. Использование стереоскопического изображения контролируемого объекта 1, получаемого упомянутыми двумя камерами 8, позволяет оценивать позиционные соотношения контролируемого объекта 1 и ультразвукового решеточного зонда 10 на основе углов изображений характерных параметров в множестве изображений в каждый момент времени. Дополнительно, на основании диапазона угла наблюдения можно определить, насколько контролируемый объект 1 удален от ультразвукового решеточного зонда 10.
[0072] Блок 90 приобретения форм может иметь сканер, способный быть управляемым с заданным шагом, или может иметь кодер. Если используется сканер или кодер, то может быть определено, насколько ультразвуковой решеточный зонд 10 переместился из начального положения в качестве опорного положения. Информационные данные о форме, приобретаемые блоком 90 приобретения форм, считываются входом 70 и затем запоминаются в устройстве 42 хранения данных установочных положений. Альтернативно, информационные данные о форме в ранее подготовленных чертежах и т.п. могут быть считаны входом 70 и затем запомнены в устройстве 42 хранения данных установочных положений. Информационные данные о форме включают в себя данные о форме поверхности контролируемого объекта 1.
[0073] Вычислитель 31 установочного положения и вычислитель 32 формы поверхности считывают необходимые информационные данные о форме из устройства 42 хранения данных установочных положений и затем вычисляют установочное положение и форму поверхности контролируемого объекта 1 и получают приобретенную форму.
[0074] Альтернативно, цифровые данные форм ультразвуковых волн, генерируемые на основании ультразвуковых волн, передаваемых от ультразвукового решеточного зонда 10, могут быть использованы и запомнены в устройстве 41 хранения данных обработанных сигналов. Если контролируемый объект 1 является однородной плоской пластиной, имеющей постепенно изменяющуюся толщину, как описано ниже со ссылкой на фиг. 6-8, то эхо-сигналы ультразвуковых элементов 11 будут иметь разные моменты времени прихода друг относительно друга, хотя они не имеют никакой разности времени прихода, если контролируемый объект 1 имеет равномерную толщину. Таким образом, разность расстояний между ультразвуковыми элементами может быть определена на основании произведения скорости звука в среде 5 распространения звука и времени задержки. Дополнительно, может быть определено, насколько наклонен ультразвуковой решеточный зонд 10, расположенный на плоской пластине.
[0075] Дополнительно, если используется информация об эхо-сигнале поверхности, которая включена в цифровые данные форм ультразвуковых волн, то может быть вычислено распределение расстояния между контролируемым объектом 1 и ультразвуковым решеточным зондом 10. Вычислитель 32 формы поверхности может считывать цифровые данные форм ультразвуковых волн из устройства 41 хранения данных обработанных сигналов из данных форм ультразвуковых волн и вычислять приобретенную форму в качестве формы поверхности контролируемого объекта 1.
[0076] Как описано выше, вычислитель 31 установочного положения считывает при необходимости либо цифровые данные форм ультразвуковых волн, запоминаемые в устройстве 41 хранения данных обработанных сигналов, либо информационные данные о форме, запоминаемые в устройстве 42 хранения данных установочных положений, либо и то, и другое. Затем вычислитель 31 установочного положения вычисляет установочные положения, и вычислитель 32 формы поверхности вычисляет форму поверхности для получения приобретенной формы.
[0077] Вычислитель 33 времени задержки, таким образом, выполнен с возможностью вычисления, относительно формы поверхности контролируемого объекта 1, значений времени задержки по меньшей мере одного из передачи и приема ультразвуковой волны каждым из ультразвуковых элементов 11. Вычислитель 33 времени задержки вычисляет значение времени задержки, в течение которого каждый из ультразвуковых лучей передается, фокусируется в фокусной точке, и принимается. На практике, для передачи ультразвуковых лучей от ультразвуковых элементов 11, с разностью времени, переключатели 22 выполняют переключение на основе вычисленных значений времени задержки, прикладывая напряжение к ультразвуковым элементам 11. В случае возбуждения ультразвуковых элементов 11 независимо друг от друга, синтезирующий вычислитель 34 (описанный ниже) синтезирует цифровую ультразвуковую волну с использованием значений времени задержки, вычисленных вычислителем 33 времени задержки.
[0078] Вычислитель 33 времени задержки вычисляет значения времени задержки на основании позиционного соотношения между ультразвуковым решеточным зондом 10 и контролируемым объектом 1 (т.е. разностей расстояний по осям координат и угловой разности), угла β преломления ультразвукового контроля, глубины фокуса, приобретенной формы контролируемого объекта 1, скорости звука в среде 5 распространения звука и в контролируемом объекте 1.
[0079] Приобретенная форма контролируемого объекта 1 может иметь криволинейную поверхность или выступы и углубления, не имеющие плоской поверхности, или наклонную плоскую поверхность, как в большинстве случаев, и могут быть выполнены геометрические вычисления. Как описано выше, поверхность контролируемого объекта 1 может быть вычислена вычислителем 32 формы поверхности с использованием времени распространения ультразвуковых волн, передаваемых от ультразвуковых элементов 11, или с использованием заданных информационных данных о форме, таких как ранее подготовленные чертежи. Дополнительно, блок 90 приобретения форм, такой как камера или лазерный дальномер, может быть прикреплен к ультразвуковому решеточному зонду 10 или расположен вблизи ультразвукового решеточного зонда 10. Более того, время задержки может быть заранее задано и запомнено в памяти, и может быть считано и затем использовано.
[0080] Контролируемый объект может контролироваться, например, область за областью (по его областям). В этом случае, не все ультразвуковые элементы 11 ультразвукового решеточного зонда 10 используются одновременно, а некоторые ультразвуковые элементы 11, в виде одной группы, используются сначала, и ультразвуковые элементы 11, составляющие эту группу, последовательно сдвигаются. Ультразвуковые элементы 11 любой группы, которые используются одновременно, будут называться «группой активных ультразвуковых элементов». Группа активных ультразвуковых элементов может включать в себя все ультразвуковые элементы 11 ультразвукового решеточного зонда 10.
[0081] Вычислитель 33 времени задержки подобным образом вычисляет время задержки для сдвига каждой синхронизации приема ультразвуковых волн. Время задержки вычисляют на основе заданной фокусной точки и координат относительных положений и наклона каждого ультразвукового элемента 11, образующего группу, так что ультразвуковая волна может быть сначала сфокусирована в заданную фокусную точку и затем принята. Фокусная точка может быть установлена на задней поверхности контролируемого объекта 1 или в положении, достаточно далеком от задней поверхности контролируемого объекта 1. Таким образом, фокусная точка может быть установлена в подходящем положении согласно различным условиям.
[0082] Синтезирующий вычислитель 34 генерирует синтезированный сигнал с использованием цифровых данных форм ультразвуковых волн, которые приняли ультразвуковые элементы 11 группы активных ультразвуковых элементов, и которые запомнило устройство 41 хранения данных обработанных сигналов. Более конкретно элементы цифровых данных форм ультразвуковых волн, принятые в момент времени с каждым временем задержки для ультразвуковых элементов 11, сдвигаются по оси времени и затем складываются или арифметически усредняются, в результате чего генерируется синтезированный сигнал (т.е. синтезированный эхо-сигнал). Синтезированный сигнал может быть сгенерирован способами, отличными от сложения и арифметического усреднения.
[0083] Генератор 35 интегрированного изображения использует формы волн, полученные в двух или более положениях ультразвукового решеточного зонда 10, которые перекрываются в направлении x друг с другом, в результате чего генерируются данные для изображения поперечного сечения x-z, а именно, для продольно-глубинного ультразвукового контрольного изображения. Затем продольно-глубинное ультразвуковое контрольное изображение генерируется способом, устанавливаемым регулятором 36 области перекрытия, как описано ниже, в результате чего получают данные интегрированного продольно-глубинного изображения. А именно, генератор 35 интегрированного изображения генерирует данные продольно-глубинного интегрированного изображения, представляющие изображение (т.е. продольно-глубинное позиционное изображение), продолжающееся вдоль плоскостей, параллельных осям x и z, подлежащее отображению для ультразвукового контроля.
[0084] Визуализацию во многих случаях выполняют посредством либо «В-сканирования», либо «С-сканирования». Изображение восстанавливают на основе угла преломления или угла ультразвукового контроля. Далее будет описана визуализация, выполняемая посредством В-сканирования.
[0085] Если две или более области, которые сканирует ультразвуковой решеточный зонд 10, перекрывают друг друга в данной зоне, то регулятор 36 области перекрытия выбирает способ формирования (генерирования) изображения для ультразвукового контроля на основе приобретенной формы контролируемого объекта 1, которая была приобретена в каждом положении ультразвукового решеточного зонда 10. А именно, регулятор 36 области перекрытия сначала обращается к приобретенной форме контролируемого объекта 1, которая получена в каждом из положений ультразвукового решеточного зонда 10, и затем выбирает способ формирования изображения области перекрытия. Следовательно, генератор 35 интегрированного изображения может сгенерировать продольно-глубинное интегрированное изображение, составленное из двух или более продольно-глубинных изображений, полученных посредством ультразвукового контроля в каждом положении.
[0086] Приобретенные формы для одной и той же области контролируемого объекта 1, которые получены в разных положениях ультразвукового решеточного зонда 10, не являются полностью идентичными друг другу. А именно, контролируемый объект 1 может иметь криволинейную поверхность, или продольное направление (т.е. направление x), в котором располагаются ультразвуковые элементы 11, могут не быть параллельным поверхности контролируемого объекта 1. В таких случаях, соотношение между ультразвуковыми элементами 11 и углом падения реверсируют друг относительно друга при выполнении ультразвукового контроля в одной и той же области. Это делает контрольные результаты отличными друг от друга. Путь распространения и значения времени задержки ультразвуковых волн, таким образом, отличаются друг от друга.
[0087] Для вычисления значений времени задержки должна быть получена информация в отношении установления группы активных ультразвуковых элементов, информация о координатах и углах каждого ультразвукового элемента 11 группы активных ультразвуковых элементов, данные о форме поверхности контролируемого объекта 1 в положении, где контролируемый объект 1 принимает ультразвуковые волны. Координаты и углы каждого из ультразвуковых элементов 11 вычисляются вычислителем 31 установочного положения, и форма S поверхности контролируемого объекта 1 вычисляется вычислителем 32 формы поверхности.
[0088] На основе координат каждого ультразвукового элемента 11, вычисляют наименьшее время, необходимое ультразвуковым волнам для того, чтобы распространиться от ультразвукового элемента 11 в координаты фокусной точки на контролируемом объекте 1. Разность времени между временем распространения каждого ультразвукового элемента 11 и наименьшим временем определяют затем как время задержки. Для вычисления времени задержки, может быть использована приобретенная форма, полученная на основании цифровых данных форм ультразвуковых волн, в то время как ультразвуковой решеточный зонд 10 установлен в соседнее положение.
[0089] Запоминающее устройство 40 имеет устройство 41 хранения данных обработанных сигналов и устройство 42 хранения данных установочных положений.
[0090] Устройство 41 хранения данных обработанных сигналов запоминает цифровые данные форм ультразвуковых волн, которые аналого-цифровой преобразователь 23 сгенерировал на основании ультразвуковых эхо-сигналов, принятых секцией 20 приема/передачи.
[0091] Устройство 42 хранения данных установочных положений принимает информационные данные об установочных положениях в отношении относительных положений контролируемого объекта 1 и ультразвукового решеточного зонда 10, и информационные данные о форме в отношении формы, в том числе приобретенной формы контролируемого объекта 1, извне через вход 70. Устройство 42 хранения данных установочных положений затем запоминает информационные данные об установочных положениях и информационные данные о форме и выводит их для вычислителя 31 установочного положения.
[0092] Дисплей 60 отображает данные, запоминаемые в устройстве 41 хранения данных обработанных сигналов и устройстве 42 хранения данных установочных положений, и результаты вычисления, выполняемого в вычислителе 30. Дополнительно, дисплей 60 может отображать синтезированный сигнал ультразвуковых эхо-сигналов, результат визуализации, координаты и относительное положение ультразвукового решеточного зонда 10 относительно контролируемого объекта 1, и условия ультразвукового контроля, такие как время задержки, глубина фокуса и угол преломления ультразвукового контроля. Более того, дисплей 60 может отображать по меньшей мере одно или комбинацию из продольно-глубинного контрольного изображения и продольно-глубинного интегрированного изображения ультразвукового решеточного зонда 10, удерживаемого в установочном положении, и приобретенной формы контролируемого объекта 1.
[0093] Дисплей 60 может быть дисплеем любого типа, который может отображать цифровые данные, таким как так называемый PC-монитор, телевизор или проектор. Он может быть дисплеем, который сначала преобразует изображение в аналоговый сигнал и затем отображает изображение, подобно электронно-лучевой трубке. Альтернативно, он может иметь функцию пользовательского интерфейса для генерирования предупредительного сигнала посредством либо звука, либо света, или может иметь пользовательский интерфейс, такой как сенсорная панель.
[0094] Вход 70 принимает извне как информационные данные об установочных положениях, так и информационные данные о форме, описанные выше, и принимает извне данные, необходимые для вычисления, например, данных о физических характеристиках и данных об акустических характеристиках.
[0095] Контроллер 50 управляет секцией 20 приема/передачи, вычислителем 30, запоминающим устройством 40, дисплеем 60, и входом 70 и при этом регулирует синхронизацию операций этих секций (т.е. секции 20 приема/передачи, вычислителя 30, запоминающего устройства 40, дисплея 60, и входа 70) для обеспечения согласования. Контроллер 50 может быть универсальным устройством, таким как персональный компьютер (personal computer - PC), которое может выполнять различные операции и осуществлять передачу данных. Если это так, то PC может быть соединен с теми секциями, которые имеет консоль 110 мониторинга, через коммуникационные кабели, которые имеют эти секции, за исключением ультразвукового решеточного зонда 10, приводного устройства 80 решеточного зонда и блока 90 приобретения форм.
[0096] Фиг. 5 является блок-схемой последовательности операций, показывающей последовательность операций ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Ультразвуковой контроль с линейным сканированием согласно первому варианту осуществления будет описан поэтапно.
[0097] Для контроля контролируемого объекта 1, устанавливают ультразвуковой решеточный зонд 10. Ультразвуковой решеточный зонд 10 передает ультразвуковые волны к контролируемому объекту 1 и принимает ультразвуковые волны, отраженные контролируемым объектом 1. Если контролируемый объект 1 является большим, чем ультразвуковой решеточный зонд 10, то ультразвуковой решеточный зонд 10 должен последовательно сдвигаться в направлении x в несколько положений. Сначала выбирают (этап S01) установочное положение ультразвукового решеточного зонда 10. Затем ультразвуковой решеточный зонд 10 располагают (этап S02) в выбранном положении.
[0098] Затем вычисляют (этап S03) положение и форму поверхности контролируемого объекта 1. А именно, вычислитель 31 установочного положения вычисляет относительные положения контролируемого объекта 1 и ультразвукового решеточного зонда 10. Дополнительно, вычислитель 32 формы поверхности вычисляет форму той поверхности контролируемого объекта 1, которая обращена к ультразвуковому решеточному зонду 10, и получает приобретенную форму. Этап S03 будет объяснен более конкретно со ссылкой на случай, когда ультразвуковой решеточный зонд 10 передает ультразвуковые волны к контролируемому объекту 1.
[0099] Фиг. 6 является продольным разрезом, показывающим первую комбинацию контролируемого объекта, имеющего форму плоской пластины, и ультразвукового решеточного зонда устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0100] Фиг. 7 является продольным разрезом, показывающим вторую комбинацию контролируемого объекта, имеющего форму плоской пластины, и ультразвукового решеточного зонда устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. В случае, показанном на фиг. 7, толщина контролируемого объекта 1 изменяется в продольном направлении (т.е. в направлении x).
[0101] Фиг. 8 является продольным разрезом, показывающим третью комбинацию контролируемого объекта, имеющего форму плоской пластины, и ультразвукового решеточного зонда устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. В случае, показанном на фиг. 8, ультразвуковой решеточный зонд 10 наклонен по отношению к оси x (т.е. к направлению x).
[0102] Сначала ультразвуковой решеточный зонд 10 располагают таким образом, чтобы он был обращен к поверхности контролируемого объекта 1, находящейся на противоположной стороне среды 5 распространения звука. Затем последовательно прикладывают разность потенциалов к N ультразвуковым элементам 11. Упомянутые N ультразвуковых элементов 11 принимают отраженные волны. Время, которое проходит с момента, когда n-ый ультразвуковой элемент 11 (n=1, 2, …, N) передает ультразвуковые волны, до момента, когда n-ый ультразвуковой элемент 11 принимает волны, отраженные от поверхности контролируемого объекта 1, называется далее «интервалом t1n времени поверхности». Время, которое проходит с момента, когда n-ый ультразвуковой элемент 11 (n=1, 2, …, N) передает ультразвуковые волны, до момента, когда n-ый ультразвуковой элемент 11 принимает волны, отраженные от задней поверхности контролируемого объекта 1 (т.е. поверхности, обращенной от поверхности, к которой были переданы ультразвуковые волны), называется далее «интервалом t2n времени задней поверхности».
[0103] Тогда, если каждый из интервалов t1n времени поверхности и интервалов t2n времени задней поверхности будет попадать в пределы диапазонов точности измерения для всех n (n=1, 2, …, N), то расстояние между ультразвуковым решеточным зондом 10 и передней поверхностью 1а и расстояние между передней поверхностью 1а и задней поверхностью 1b контролируемого объекта 1 будет постоянным в направлениях x и y.
[0104] Если интервалы t1n времени поверхности будут постепенно уменьшаться, и интервалы t2n времени задней поверхности не будут настолько изменяться, когда n изменяется от 1 до N, то расстояние между ультразвуковым решеточным зондом 10 и передней поверхностью 1а контролируемого объекта 1 будет уменьшаться, но расстояние между ультразвуковым решеточным зондом 10 и задней поверхностью 1b изменяться не будет. Этот случай соответствует случаю, когда толщина контролируемого объекта 1 увеличивается, когда n изменяется от 1 до N, и ультразвуковой решеточный зонд 10 расположен параллельно задней поверхности 1b контролируемого объекта 1, как показано на фиг. 7.
[0105] Например, если интервалы t1n времени поверхности будут постепенно уменьшаться, и интервалы t2n времени задней поверхности будут уменьшаться с той же скоростью, когда n изменяется от 1 до N, то расстояние до передней поверхности 1а и расстояние до задней поверхности 1b контролируемого объекта 1 будут уменьшаться, когда n изменяется от 1 до N, и толщина контролируемого объекта 1 не будет изменяться. Это эквивалентно случаю, когда ультразвуковой решеточный зонд 10 наклонен относительно контролируемого объекта 1, имеющего постоянную толщину, как показано на фиг. 8.
[0106] Ультразвуковые элементы 11 ультразвукового решеточного зонда 10 расположены в продольном направлении (в направлении расположения от n=1 до N) ультразвукового решеточного зонда 10 и выровнены по прямой, не выдаваясь и не удаляясь друг от друга. Таким образом, выступы и углубления, которые контролируемый объект 1 имеет на передней поверхности 1а и задней поверхности 1b (т.е. формы поверхностей контролируемого объекта 1) могут быть детектированы в продольном направлении ультразвукового решеточного зонда 10. Подобным образом, может быть определено относительное позиционное соотношение между ультразвуковым решеточным зондом 10 и контролируемым объектом 1.
[0107] Вычислитель 31 установочного положения и вычислитель 32 формы поверхности вычисляют интервалы t1n времени поверхности и интервалы t2n времени задней поверхности на основе данных, запомненных в устройстве 41 хранения данных обработанных сигналов, которое запоминает цифровые данные форм ультразвуковых волн, выводимые из аналого-цифрового преобразователя 23 секции 20 приема/передачи.
[0108] Рассмотрим случай, показанный на фиг. 7 и 8, когда ультразвуковая волна, передаваемая от первого ультразвукового элемента 11 (n=1), передается перпендикулярно (а именно, в направлении z) передней поверхности 1а и отражается от передней поверхности 1а. Тогда, отраженная таким образом ультразвуковая волна распространяется к точке, находящейся снаружи относительно продольного направления (т.е. слева на фиг. 7 и 8), поскольку нормаль к передней поверхности 1а, имеющей отношение к отражению, наклонена наружу относительно продольного направления (т.е. влево на фиг. 7).
[0109] В этом случае, ультразвуковая волна, передаваемая от первого ультразвукового элемента 11 (n=1), является более слабой, чем ультразвуковая волна, передаваемая от любого другого ультразвукового элемента 11 (n не равно 1). Тогда, ультразвуковая волна, передаваемая от первого ультразвукового элемента 11 (n=1), в этом случае может быть ненадежной в качестве данных, используемых в вычислителе 31 установочного положения и вычислителе 32 формы поверхности. Если контролируемый объект 1 имеет большие выступы или углубления в поверхности, то ультразвуковые волны, передаваемые, например, от второго ультразвукового элемента 11 (n=2), также могут быть ненадежными.
[0110] Таким образом, важно проверить те части контролируемого объекта 1, которые противоположны концам ультразвукового решеточного зонда 10, для определения того, имеет ли контролируемый объект 1 выступы или углубления в своей передней поверхности 1а и своей задней поверхности 1b, а именно, для определения продольной формы поверхности контролируемого объекта 1. Ввиду этого, когда ультразвуковой решеточный зонд 10 сдвигают, следующее положение в продольном направлении ультразвукового решеточного зонда 10 определяют таким образом, чтобы обеспечить область перекрытия. Таким образом, множество данных приобретенных форм приобретают для области перекрытия.
[0111] Фиг. 9 показывает, как ультразвуковые волны передаются и принимаются согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 9 показывает блок-схему, а правая сторона показывает сигналы, принимаемые каждым ультразвуковым элементом, когда ультразвуковой сигнал отправляется первым ультразвуковым элементом. Фиг. 10 показывает, как ультразвуковые волны передаются и принимаются согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 10 показывает блок-схему, а правая сторона показывает сигналы, принимаемые каждым ультразвуковым элементом, когда ультразвуковой сигнал отправляется вторым ультразвуковым элементом. Фиг. 11 показывает, как ультразвуковые волны передаются и принимаются согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 11 показывает блок-схему, а правая сторона показывает сигналы, принимаемые каждым ультразвуковым элементом, когда ультразвуковой сигнал отправляется N-ым ультразвуковым элементом.
[0112] Один или несколько ультразвуковых элементов 11 ультразвукового решеточного зонда 10 передают ультразвуковые волны, и один или несколько ультразвуковых элементов 11 ультразвукового решеточного зонда 10 принимают ультразвуковые волны, отраженные от дефекта 2. Эту последовательность операций повторяют, сдвигая ультразвуковые элементы 11, которые передают ультразвуковые волны, в результате чего приобретаются данные ответных форм волн. Все N ультразвуковых элементов 11 или некоторые ультразвуковые элементы 11 могут быть использованы для передачи или приема, как показано на фиг. 9.
[0113] В случае, показанном на фиг. 9, переключатели 22, встроенные в секцию 20 приема/передачи, заставляют N ультразвуковых элементов 11 передавать ультразвуковые волны в последовательном порядке от первых ультразвуковых элементов 11 до N-ых ультразвуковых элементов 11.
[0114] Если первый ультразвуковой элемент 11 (n=1) передает ультразвуковую волну, как показано на фиг. 9, то все ультразвуковые элементы 11 (n от 1 до N) принимают сигналы, соответственно, которые имеют формы волн, показанные в правой части фиг. 9. Если второй ультразвуковой элемент 11 (n=2) передает ультразвуковую волну, как показано на фиг. 10, то все ультразвуковые элементы 11 (n от 1 до N) принимают сигналы, соответственно, которые имеют формы волн, показанные в правой части фиг. 10. Если последний ультразвуковой элемент 11 (n=N) передает ультразвуковую волну, как показано на фиг. 11, то все ультразвуковые элементы 11 (n от 1 до N) принимают сигналы, соответственно, которые имеют формы волн, показанные в правой части фиг. 11.
[0115] Самое большее N*N основных форм волн могут быть записаны с использованием ультразвукового решеточного зонда 10, включающего в себя N ультразвуковых элементов 11, когда N ультразвуковых элементов 11 возбуждаются один за другим последовательно. Только для передачи, может быть использовано множество ультразвуковых элементов 11 вместо единственного ультразвукового элемента 11, в то время как каждый из ультразвуковых элементов 11 принимает форму волны. В этом случае, могут быть применены значения времени задержки для формирования, посредством этого, плоских волн, чтобы заставить ультразвуковые волны сходиться или рассеиваться.
[0116] Ультразвуковые волны, передаваемые в контролируемый объект 1, отражаются и рассеиваются дефектом 2, таким как трещина или мусор, существующим на поверхности контролируемого объекта 1 или в контролируемом объекте 1. Ультразвуковые волны, отражаемые или рассеиваемые таким образом, принимаются ультразвуковыми элементами 11 ультразвукового решеточного зонда 10.
[0117] Ультразвуковая волна, передаваемая от каждого ультразвукового элемента 11, принимается каждым из N ультразвуковых элементов 11, в том числе ультразвуковым элементом, который передал эту ультразвуковую волну, и затем последовательно обрабатывается. Данные обработанных сигналов запоминают в устройстве 41 хранения данных обработанных сигналов запоминающего устройства 40.
[0118] Фиг. 12 показывает, как ультразвуковая волна передается и принимается ультразвуковым решеточным зондом согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Левая сторона фиг. 12 показывает блок-схему, а правая сторона показывает схему формы волны части эхо-волны. Для простоты объяснения, как видно на фиг. 12, используются только три ультразвуковых элемента, и ультразвуковые элементы с первого по третий передают ультразвуковые волны по направлению к дефекту 2, существующему в контролируемом объекте 1. Три ультразвуковые волны передаются от элементов с первого по третий, соответственно, с некоторым временем задержки друг относительно друга, таким образом, что они могут сходиться в конкретной точке, существующей в конкретном направлении. Альтернативно, каждая из ультразвуковых волн может быть передана отдельно, обработана аналого-цифровым преобразователем 23 и затем запомнена в устройстве 41 хранения данных обработанных сигналов. Затем данные обработанных сигналов, запоминаемые в устройстве 41 хранения данных обработанных сигналов, синтезируют с временем задержки друг относительно друга.
[0119] Далее будет описан случай, когда три ультразвуковых элемента 11 передают ультразвуковые волны со временем задержки друг относительно друга. Альтернативно, ультразвуковые волны могут быть переданы отдельно и затем синтезированы с временем задержки. В любом случае, направления и точка схождения (т.е. фокусная точка), в которой они сходятся, определяются с использованием времени задержки передачи ультразвуковых волн от трех ультразвуковых элементов 11. Число ультразвуковых элементов 11 передающей группы не ограничено тремя. Два ультразвуковых элемента или четыре или более ультразвуковых элементов могут быть использованы в качестве той же самой передающей группы.
[0120] В этом случае, фокусная точка может быть соответствующим образом установлена согласно различным условиям в положении, таком как положение на задней поверхности 1b контролируемого объекта 1, наблюдаемом из ультразвукового решеточного зонда 10, или в положении, достаточно далеком от задней поверхности 1b контролируемого объекта 1.
[0121] Форма волны, не учитывающая время задержки, будет называться «основной формой волны». Далее, порядковый номер любого ультразвукового элемента 11, который передает ультразвуковую волну, будет иметь префикс «p», и порядковый номер любого ультразвукового элемента 11, который принимает ультразвуковую волну, будет иметь префикс «q», и основная форма волны будет называться «Ufp,q».
[0122] Как показано на фиг. 12, ультразвуковые волны, передаваемые от первого ультразвукового элемента и принимаемые ультразвуковыми элементами с первого по третий, обозначены ʺUf1,1ʺ, ʺUf1,2ʺ и ʺUf1,3ʺ, соответственно. Ультразвуковые волны, передаваемые от второго ультразвукового элемента и принимаемые ультразвуковыми элементами с первого по третий, обозначены ʺUf2,1ʺ, ʺUf2,2ʺ и ʺUf2,3ʺ, соответственно. Подобным образом, ультразвуковые волны, передаваемые от третьего ультразвукового элемента и принимаемые ультразвуковыми элементами с первого по третий, обозначены ʺUf3,1ʺ, ʺUf3,2ʺ и ʺUf3,3ʺ, соответственно.
[0123] Фиг. 13 является схемой формы волны, объясняющей время задержки, когда ультразвуковая волна отправляется и принимается согласно способу ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Время задержки, показанное на фиг. 13, является суммой времени задержки передачи, требуемого для схождения передаваемой ультразвуковой волны, и времени задержки приема, требуемого для схождения принимаемой ультразвуковой волны. Ультразвуковой элемент 11, который передает ультразвуковую волну, не обязательно должен быть таким же, как ультразвуковой элемент 11, который принимает ультразвуковую волну.
[0124] После этапа S03, вычислитель 33 времени задержки вычисляет (этап S04) время Т задержки. Время Т задержки является значением, получаемым посредством вычитания опорного времени из суммы времени задержки передачи и времени задержки приема, на основе относительных положений (каждое из которых определяется координатами и углом) контролируемого объекта 1 и фокусной точки, которые были вычислены вычислителем 31 установочного положения, для каждой комбинации передающих и принимающих ультразвуковых элементов 11 ультразвукового решеточного зонда 10.
[0125] После этапа S04, ультразвуковые волны передают и принимают (этап S05) согласно условиям для ультразвукового контроля. Более конкретно, ультразвуковые волны передают с каждым временем задержки, вычисленным вычислителем 33 времени задержки на этапе S04. Например, ультразвуковые элементы 11 с первого по третий передают ультразвуковые волны с каждым заданным временем задержки. Затем ультразвуковые элементы 11 со второго по четвертый передают ультразвуковые волны с каждой заданной временем задержки. Таким образом, группа ультразвуковых элементов 11, расположенных в продольном направлении ультразвукового решеточного зонда 10, которые передают продольно, сдвигается группа за группой. Наконец, ультразвуковые элементы с (N-2)-ого элемента по N-ый элемент передают ультразвуковые волны с каждым временем задержки.
[0126] Затем синтезирующий вычислитель 34 синтезирует (этап S06) цифровые данные форм ультразвуковых волн, полученные таким образом. Более точно, вычислитель 33 времени задержки сдвигает, как показано на фиг. 13, соответствующие основные формы волн в направлении оси времени, с использованием каждого времени Т задержки, которое вычислитель 33 времени задержки вычислил, или относительного времени задержки, которое является разностью между временем Т задержки и опорным временем задержки. Затем формы волн синтезируют, генерируя синтезированную форму М волны. В результате, отраженные волны генерируются в один и тот же момент времени.
[0127] Фиг. 14 является схемой формы волны, показывающей форму эхо-волны, синтезируемую в способе ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Форма эхо-волны может быть синтезирована посредством сложения или усреднения. Способ синтезирования формы эхо-волны, тем не менее, этим не ограничен. Может быть использован любой другой способ синтезирования.
[0128] Способ получения синтезированной формы М волны не ограничен способом, описанным выше. Как и в обычных UT с фазированными решетками, может быть использовано средство, которое выбирает группы элементов для возбуждения, устанавливает время задержки передачи/приема, для передачи времени задержки в схему во время передачи и приема ультразвуковых волн и подведения электроэнергии к выбранным группам элементов, в результате чего генерируется синтезированная форма М волны.
[0129] Когда синтезируются сгенерированные таким образом цифровые данные форм ультразвуковых волн, приобретаются синтезированные данные форм волн, и отношение сигнал-шум (S/N) каждой отраженной волны увеличивается. Время Tr, в которое отраженные волны были сгенерированы, может быть получено с высокой точностью, и может быть точно определено положение дефекта.
[0130] Затем контроллер 50 определяет, завершил ли ультразвуковой решеточный зонд 10 сканирование во всех заданных положениях, а именно, было ли завершено (этап S07) сканирование. Если сканирование не было завершено («НЕТ» на этапе S07), то процесс возвращается к этапу S01, и устанавливается новое положение, в которое ультразвуковой решеточный зонд 10 должен переместиться в своем продольном направлении. Затем выполняется этап S02 и следующие этапы. В это время, существует область перекрытия между областью, где установленный в новое положение ультразвуковой решеточный зонд 10 покрывает контролируемый объект 1, и областью, где ультразвуковой решеточный зонд 10 покрывал контролируемый объект 1 до перемещения в новое положение.
[0131] Если сканирование завершено («ДА» на этапе S07), то выполняют (этап S08) визуализацию синтезированных данных форм волн. А именно, на основании синтезированных данных форм, сгенерированных синтезирующим вычислителем 34, генератор 35 интегрированного изображения генерирует данные продольно-глубинного изображения, которые дисплей 60 будет использовать для отображения интегрированного изображения. Дисплей 60 отображает интегрированное изображение на основе данных продольно-глубинного изображения.
[0132] Фиг. 15 является концептуальным продольным разрезом для объяснения направления, в котором ультразвуковые волны распространяются устройством ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Область 6 ультразвукового контроля является более длинной в направлении x, чем область, покрываемая ультразвуковыми элементами 11 ультразвукового решеточного зонда 10.
[0133] Для получения продольно-глубинного изображения посредством линейного сканирования, используют не только синтезированную форму М волны, но и информацию в отношении пути L ультразвукового луча, по которому распространялась синтезированная волна. Если множество ультразвуковых элементов 11 было использовано для генерирования синтезированной формы волны, то в качестве пути распространения синтезированной формы волны будет использован путь, продолжающийся, например, от центра ультразвукового элемента 11.
[0134] Путь L ультразвукового луча определяется углом α падения синтезированной формы М волны и контрольным углом β преломления.
[0135] Фиг. 16 является продольно-глубинным ультразвуковым контрольным изображением, которое является иллюстративным результатом ультразвукового контроля, который был выполнен устройством ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Продольно-глубинное ультразвуковое контрольное изображение основано на данных продольно-глубинного интегрированного изображения, генерируемых генератором 35 интегрированного изображения, и отображается дисплеем 60, как показано на фиг. 16. Если ультразвуковой решеточный зонд 10 выполняет ультразвуковой контроль в своих двух установочных положениях, то генератор 35 интегрированного изображения генерирует два продольно-глубинных ультразвуковых контрольных изображения для соответствующих двух установочных положений.
[0136] Затем регулятор 36 области перекрытия регулирует и устанавливает (этап S09) условия формирования (генерирования) продольно-глубинного изображения области перекрытия.
[0137] Фиг. 17 является концептуальным продольным разрезом, объясняющим, как изображения интегрируются, когда информационные данные о форме поверхности контролируемого объекта приобретаются в двух установочных положениях ультразвукового решеточного зонда. Здесь предполагается, что положения ультразвукового решеточного зонда 10, или первое установочное положение зонда и второе установочное положение зонда, которое является другой областью в направлении x, являются такими, как описано ниже. А именно, части, покрытые ультразвуковым решеточным зондом 10 в первом установочном положении зонда и части, покрытые во втором установочном положении зонда, имеют область перекрытия друг друга. Второе установочное положение зонда сдвинуто в направлении x относительно первого установочного положения зонда.
[0138] Время задержки является суммой времени задержки передачи и времени задержки приема. Время задержки передачи является временем, которое необходимо каждой ультразвуковой волне для перемещения от ультразвукового элемента 11 до контролируемого объекта 1 и затем до дефекта 2 в контролируемом объекте 1. Время задержки приема является временем, которое необходимо каждой ультразвуковой волне, отраженной от дефекта 2, для перемещения в контролируемом объекте 1, выхода из контролируемого объекта 2 и достижения ультразвукового элемента 11.
[0139] Время задержки передачи и время задержки приема зависят от формы поверхности контролируемого объекта 1. А именно, расстояние до контролируемого объекта 1 изменяется, если форма поверхности изменяется, или путь распространения изменяется, если угол нормали изменяется.
[0140] Для вычисления значений времени задержки, вычислитель 33 времени задержки использует координаты и углы каждого из ультразвуковых элементов 11, которые возбуждаются как группа, и приобретенную форму S контролируемого объекта 1, к которому передаются ультразвуковые волны. Форма S поверхности контролируемого объекта 1 вычислена вычислителем 32 формы поверхности. На основе координат каждого ультразвукового элемента 11, вычисляют наименьшее время, необходимое ультразвуковой волне для распространения от каждого ультразвукового элемента 11 до фокусной точки, установленной в контролируемом объекте 1, и разность времени между ультразвуковыми элементами 11 используют в качестве времени задержки.
[0141] В результате, первая приобретенная форма Sa относительно контролируемого объекта 1, которую вычислитель 32 формы поверхности вычислил на основании синтезированных данных форм волн, приобретенных в первом установочном положении зонда, перекрывает вторую приобретенную форму Sb относительно контролируемого объекта 1, которую вычислитель 32 формы поверхности вычислил на основании синтезированных данных форм волн, приобретенных во втором установочном положении зонда. Затем должна быть установлена форма Sc поверхности для областей взаимного перекрытия первой приобретенной формы Sa и второй приобретенной формы Sb, и регулятор 36 области перекрытия определяет форму Sc поверхности.
[0142] Таким образом, когда ультразвуковой решеточный зонд 10 должен последовательно сдвигаться для установки в несколько положений вдоль продольного направления (направления x), частично перекрывающих друг друга, вычислитель 33 времени задержки вычисляет значения времени задержки на основе формы поверхности области перекрытия, определенной на этапе S04.
[0143] Фиг. 18 является блок-схемой, объясняющей функцию регулятора 36 области перекрытия. Фиг. 18 показывает, как регулятор 36 области перекрытия выполняет различные функции, и конкретную последовательность операций при каждых условиях, определенных регулятором 36 области перекрытия. На фиг. 18, таким образом, каждый из некоторых блоков вычисления показан таким образом, как если бы это были два блока.
[0144] Таким образом, регулятор 36 области перекрытия выполнен с возможностью установления условий формы поверхности, обозначаемых для вычислителя времени задержки при вычислении значений времени задержки либо в первом установочном положении зонда, либо во втором установочном положении зонда, как первая приобретенная форма, получаемая в первом установочном положении зонда, и вторая приобретенная форма, получаемая во втором установочном положении зонда. Согласно условиям формы поверхности, установленным регулятором 36 области перекрытия, вычислитель 33 времени задержки обращается как к первой приобретенной форме, так и ко второй приобретенной форме для вычисления значений времени задержки в первом установочном положении зонда и/или во втором установочном положении зонда.
[0145] Как показано на фиг. 18, регулятор 36 области перекрытия работает дважды и выполняет регулирование А и регулирование В.
[0146] Регулирование А выполняется на этапе между этапом S03 и этапом S04. Как указано выше, вычислитель 32 формы поверхности вычисляет, на этапе S03, первую приобретенную форму Sa и вторую приобретенную форму Sb, полученные, соответственно, в первом и втором установочных положениях зонда, перекрывающих друг друга. Следовательно, необходимо определить, как должны быть использованы первая приобретенная форма Sa и вторая приобретенная форма Sb для приобретения изображения в области взаимного перекрытия первого и второго установочных положений зонда.
[0147] В отношении области перекрытия, регулятор 36 области перекрытия выбирает, при регулировании А, один из трех способов выбора (описанных ниже) регулирования и получения отрегулированной формы области перекрытия на основе первой приобретенной формы Sa и второй приобретенной формы Sb.
[0148] В первом способе выбора, этап S04 и последующие этапы выполняют с использованием как первой приобретенной формы Sa в качестве первой отрегулированной формы, так и второй приобретенной формы Sb в качестве второй отрегулированной формы, как указано оконтуренными стрелками 1а и 2а на фиг. 18. В этом случае, первое интегрированное изображение получают на основе первой приобретенной формы Sa, и второе интегрированное изображение получают на основе второй приобретенной формы Sb. Таким образом, получают два типа интегрированных изображений, а именно, первое и второе интегрированные изображения. Таким образом, при регулировании В, регулятор 36 области перекрытия выбирает один из некоторых способов (описанных ниже) интегрирования изображений. Блок-схема последовательности операций фиг. 5 показывает последовательность операций на основе этого случая.
[0149] Во втором способе при регулировании А, форму поверхности, на основании которой будут вычислены значения времени задержки для первого установочного положения зонда, включающего в себя область перекрытия, оценивают на основе как первой приобретенной формы Sa, так и второй приобретенной формы Sb, как указано толстой стрелкой 1b на фиг. 18. В этом случае, регулятор 36 области перекрытия выбирает первую отрегулированную форму из некоторых отрегулированных форм в регулировании С1. Первая отрегулированная форма, выбранная регулятором 36 области перекрытия, получена любым доступным способом. В одном способе, первую приобретенную форму Sa используют для части, находящей за пределами области перекрытия, и вторую приобретенную форму Sb используют для области перекрытия, не используя первую приобретенную форму Sa. В другом способе, первую приобретенную форму Sa и вторую приобретенную форму Sb усредняют в области перекрытия. Еще в одном способе, первую приобретенную форму Sa и вторую приобретенную форму Sb сначала взвешивают и затем суммируют. В этом варианте осуществления, форму поверхности области перекрытия получают в регулировании С1. Тем не менее, не только область перекрытия, но и заданная часть второй приобретенной формы Sb, которая лежит в области первой приобретенной формы Sa, может быть установлена в качестве части, которая используется для выбора способа приобретения формы поверхности. Таким образом, использование концевой части второй приобретенной формы Sb в области первой приобретенной формы Sa позволяет получить первую отрегулированную форму более точно, чем в иных случаях. При выборе второго способа, вычислитель 33 времени задержки, синтезирующий вычислитель 34 и генератор 35 интегрированного изображения будут выполнять вычисление на основе только первой отрегулированной формы, которая устанавливается с использованием как первой приобретенной формы Sa, так и второй приобретенной формы Sb, для генерирования единственного конечного отрегулированного изображения.
[0150] Во втором способе при регулировании А, форму поверхности, на основании которой будут вычислены значения времени задержки для первого установочного положения зонда, включающего в себя область перекрытия, оценивают на основе как первой приобретенной формы Sa, так и второй приобретенной формы Sb, как указано толстой стрелкой 2b на фиг. 18. В этом случае, регулятор 36 области перекрытия выбирает вторую отрегулированную форму из некоторых отрегулированных форм в регулировании С2. Вторая отрегулированная форма, выбираемая регулятором 36 области перекрытия, получена любым доступным способом. В одном способе, вторую приобретенную форму Sb используют для части, находящейся за пределами области перекрытия, и первую приобретенную форму Sa используют для области перекрытия, не используя вторую приобретенную форму Sb. В другом способе, первую приобретенную форму Sa и вторую приобретенную форму Sb усредняют в области перекрытия. Еще в одном способе, первую приобретенную форму Sa и вторую приобретенную форму Sb сначала взвешивают и затем суммируют. В этом варианте осуществления, форму поверхности области перекрытия получают в регулировании С2. Как и во втором способе, не только область перекрытия, но и заданная часть первой приобретенной формы Sa, которая лежит в области второй приобретенной формы Sb, может быть установлена в качестве части, которая используется для выбора способа приобретения формы поверхности. Таким образом, использование концевой части первой приобретенной формы Sa в области второй приобретенной формы Sb позволяет получить вторую отрегулированную форму более точно, чем в иных случаях. При выборе третьего способа, вычислитель 33 времени задержки, синтезирующий вычислитель 34 и генератор 35 интегрированного изображения будут выполнять вычисление на основе только второй отрегулированной формы, которая устанавливается с использованием как первой приобретенной формы Sa, так и второй приобретенной формы Sb, для генерирования единственного конечного отрегулированного изображения.
[0151] Второй способ и третий способ могут быть выбраны одновременно. В отношении первой отрегулированной формы волны, второй способ может быть выбран для первой отрегулированной формы, и первый способ может быть выбран только для второй отрегулированной формы, или наоборот, первый способ может быть выбран только для первой отрегулированной формы, и третий способ может быть выбран для второй отрегулированной формы. Таким образом, если первый способ объединен со вторым способом или третьим способом, то желательно использовать изображение, интегрированное вторым или третьим способом, а не изображение, интегрированное первым способом, для получения отрегулированного изображения в регулировании В, описанном ниже.
[0152] Случай, когда регулятор 36 области перекрытия выбирает первый способ в регулировании А, будет объяснен со ссылкой на блок-схему последовательности операций, показанную на фиг. 5.
[0153] Фиг. 19 является концептуальным продольным разрезом, иллюстрирующим, как ультразвуковые волны распространяются, когда информационные данные о форме поверхности контролируемого объекта приобретаются в двух установочных положениях ультразвукового решеточного зонда. Когда перекрывающаяся часть включена в диапазон, который генерирует продольно-глубинное контрольное изображение, регулятор 36 области перекрытия определяет форму поверхности согласно командам, поступающим извне устройства ультразвукового контроля с линейным сканированием или генерируемым внутри устройства ультразвукового контроля с линейным сканированием.
[0154] На основе формы поверхности, определяемой регулятором 36 области перекрытия, генератор 35 интегрированного изображения генерирует данные, представляющие продольно-глубинное интегрированное изображение. С использованием этих данных, дисплей 60 отображает (этап S10) продольно-глубинное интегрированное изображение.
[0155] Как объяснено выше, устанавливают условия вычисления продольно-глубинного контрольного изображения области перекрытия, посредством чего устанавливают форму поверхности. Этот вариант осуществления этим не ограничен. Условия вычисления продольно-глубинного контрольного изображения области перекрытия могут быть введены извне через вход 70, или могут сохраняться внутри регулятора 36 области перекрытия.
[0156] Установление условий вычисления продольно-глубинного контрольного изображения области перекрытия включает в себя, например, выбор продольно-глубинного изображения, приобретенного одной стороной, выбор более подходящего приобретенного продольно-глубинного контрольного изображения или усреднение значений этих изображений. Более подходящее продольно-глубинное контрольное изображение является, например, изображением, генерируемым посредством передачи ультразвуковой волны вовнутрь от ультразвукового элемента 11 к контролируемому объекту 1, а именно, от N-ого ультразвукового элемента, а не от первого элемента (n=1), в случае, показанном на фиг. 7 и 8.
[0157] Некоторые примеры и условия для генерирования продольно-глубинного контрольного изображения области перекрытия будет описаны ниже.
[0158] Когда ультразвуковой решеточный зонд 10 устанавливается в два или более положений, формируются два или более продольно-глубинных ультразвуковых контрольных изображения, каждое на основе системы координат ультразвукового решеточного зонда. Два смежных продольно-глубинных ультразвуковых контрольных изображения перекрывают друг друга и образуют продольно-глубинное интегрированное изображение. Взаимно перекрывающиеся части продольно-глубинных ультразвуковых контрольных изображений формируют продольно-глубинное перекрывающееся изображение. Данные, используемые для отображения продольно-глубинного интегрированного изображения, генерируются генератором 35 интегрированного изображения.
[0159] Интегрированное изображение является продольно-глубинным изображением, используемым в ультразвуковом контроле плоской области, продолжающейся в направлениях x и z, вдоль центра направления y ультразвукового решеточного зонда 10. Это изображение имеет ширину в направлении x, которая соответствует области, в которой ультразвуковой решеточный зонд 10 расположен и перемещается. Дополнительно, это изображение имеет ширину в направлении z, которая соответствует расстоянию между передней поверхностью 1а и задней поверхностью 1b контролируемого объекта 1.
[0160] При выполнении этапов S03-S08, ультразвуковой решеточный зонд 10 в двух смежных установочных положениях генерирует данные двух синтезированных форм волн для областей перекрытия контролируемого объекта 1. Эти данные двух синтезированных форм волн получают посредством вычислений в разных положениях и посредством разных данных измерений на этапе S03. Таким образом, эти вычисляемые формы поверхностей не являются идентичными и в основном отличаются друг от друга.
[0161] Следовательно, в качестве результата этапов до этапа S08, получают два типа продольно-глубинных интегрированных изображений для областей перекрытия контролируемого объекта 1.
[0162] В регулировании В, показанном на фиг. 18, регулятор 36 области перекрытия выбирает один из пяти способов, описанных ниже, и затем получают ультразвуковое контрольное изображение области перекрытия. Упомянутые пять способов являются не более чем примерами, и для синтезирования может быть использован любой другой подходящий способ.
[0163] Фиг. 20 является концептуальным продольным разрезом, объясняющим первый способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. В случае, когда первое и второе установочные положения зонда перекрывают друг друга, как показано на фиг. 20, продольно-глубинное перекрывающееся изображение имеет данные, представляющие результаты ультразвуковых испытаний, выполненных в двух положениях. Результаты в первом установочном положении зонда обеспечивают продольно-глубинное контрольное изображение Ga (указанное точечными линиями). Результаты во втором установочном положении зонда обеспечивают продольно-глубинное контрольное изображение Gb (указанное пунктирными линиями).
[0164] В отношении области перекрытия продольно-глубинных контрольных изображений Ga и Gb, формируют продольно-глубинное интегрированное изображение Gt на основе синтезированной волны из М, и затем генерируют продольно-глубинное интегрированное изображение Gt, указанное двухточечной пунктирной линией.
[0165] Фиг. 21 является концептуальным продольным разрезом, объясняющим второй способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. В этом случае, когда первое установочное положение зонда и второе установочное положение зонда перекрывают друг друга, продольно-глубинное перекрывающееся изображение имеет данные только о результате испытания, полученном из одного установочного положения зонда. А именно, продольно-глубинное перекрывающееся изображение генерируют на основе одной из двух синтезированных форм М волн. В этом процессе, выбирают либо результат испытания в первом установочном положении зонда, либо результат испытания во втором установочном положении зонда.
[0166] Продольно-глубинное контрольное изображение Gb формируют на основе результата ультразвукового испытания, выполняемого во втором установочном положении зонда ультразвукового решеточного зонда 10, включающем в себя область перекрытия. Дополнительно, продольно-глубинное контрольное изображение Ga формируют на основе результата ультразвукового испытания, выполняемого в первом установочном положении зонда ультразвукового решеточного зонда 10, не включающем в себя область перекрытия. Продольно-глубинное контрольное изображение Ga и продольно-глубинное контрольное изображение Gb образуют продольно-глубинное интегрированное изображение Gt, указанное двухточечными пунктирными линиями.
[0167] Фиг. 22 является концептуальным продольным разрезом, объясняющим третий способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. В случае, когда первое установочное положение зонда и второе установочное положение зонда перекрывают друг друга, может быть выполнен процесс для получения арифметического среднего синтезированных форм М волн или для интегрирования обоих элементов данных, таких как пиковые удерживаемые значения.
[0168] Сначала формируют синтезированную форму Ma волны, указанную точечными линиями, расположенными с заданным расстоянием da между ними, на основе результата ультразвукового испытания, выполненного в первом установочном положении зонда. Дополнительно, формируют синтезированную форму Mb волны, указанную пунктирными линиями, расположенными с заданным расстоянием db между ними, на основе результата ультразвукового испытания, выполненного во втором установочном положении зонда. Здесь, расстояние da и расстояние db являются выровненными. Дополнительно, синтезированное изображение Ma и синтезированное изображение Mb генерируют в одном и том же положении. Затем используют синтезированную форму Mc волны или упомянутые данные для генерирования синтезированной формы волны, интегрируют эти данные, посредством чего формируют продольно-глубинное интегрированное изображение Gc в перекрывающейся части.
[0169] Фиг. 23 является концептуальным продольным разрезом, объясняющим четвертый способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления. Как показано на фиг. 23, синтезированная форма Ma волны, полученная в первом установочном положении зонда, и синтезированная форма Mb волны, полученная во втором установочном положении зонда, могут быть отображены последовательно.
[0170] Сначала формируют синтезированные формы Ma волн в местоположениях с заданными расстояниями da между ними, указанными точечными линиями, на основе результата ультразвукового испытания, выполненного в первом установочном положении зонда. Дополнительно, формируют синтезированные формы Mb волн в местоположениях с заданными расстояниями db между ними, указанными пунктирными линиями, на основе результата ультразвукового испытания, выполненного во втором установочном положении зонда. В этом процессе, синтезированную форму Ma волны формируют в положениях, отличных от положений синтезированных форм Mb волн, конкретно, в области перекрытия. В результате, синтезированная форма Mc волны включает в себя обе синтезированные формы Ma и Mb волн в области перекрытия. Продольно-глубинное контрольное изображение Gc в перекрывающейся части формируют с использованием синтезированных форм Ma и Mb волн.
[0171] Фиг. 24 является концептуальным продольным разрезом, объясняющим пятый способ перекрытия ультразвуковых контрольных изображений в устройстве ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0172] После получения результата ультразвукового испытания, такого как синтезированная форма Ma1 волны, показанная точечными линиями, в установочном положении A1 зонда ультразвукового решеточного зонда 10, получают данные результата ультразвукового испытания, такие как синтезированная форма Ma2 волны, показанная сплошными линиями, в установочном положении A2 зонда. Установочное положение A2 зонда сдвинуто относительно установочного положения A1 зонда на половину шага, с которым расположены ультразвуковые элементы 11. Таким образом, синтезированная форма волны может быть получена с плотностью, вдвое большей плотности в случае, когда используется только установочное положение А1 зонда.
[0173] Подобным образом, после получения результата ультразвукового испытания, такого как синтезированная форма Mb1 волны, показанная пунктирными линиями, в установочном положении В1 зонда, частично перекрывающем установочное положение А1 зонда, получают данные результата ультразвукового испытания, такие как синтезированная форма Mb2 волны, показанная двухточечными пунктирными линиями, в установочном положении В2 зонда, сдвинутом на половину шага, с которым расположены ультразвуковые элементы 11. Следовательно, синтезированная форма волны может быть получена с плотностью, вдвое большей плотности в случае, когда используется только установочное положение В1 зонда.
[0174] Изображения могут быть интегрированы любым из способов, описанных выше. Любой способ, описанный выше, может генерировать продольно-глубинное интегрированное изображение Gt, имеющее звуковые лучи с удвоенной псевдо-плотностью.
[0175] Фиг. 25 является концептуальным продольным разрезом, объясняющим первый способ ультразвукового контроля для контроля контролируемого объекта, имеющего криволинейную поверхность, с использованием устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0176] Установочное положение зонда ультразвукового решеточного зонда 10 перемещают в круговом направлении контролируемого объекта 1. Ультразвуковой решеточный зонд 10 приобретает синтезированную форму Ma волны в первом установочном положении зонда, синтезированную форму Mb волны во втором установочном положении зонда, и синтезированную форму Mc волны в третьем установочном положении зонда.
[0177] Синтезированная форма Ma волны, синтезированная форма Mb волны и синтезированная форма Mc волны выровнены в одном и том же направлении в контролируемом объекте 1. Таким образом, формируют продольно-глубинное интегрированное изображение Gt, имеющее параллельные звуковые лучи в контролируемом объекте 1, на основе контрольного угла преломления в опорном положении (например, во втором установочном положении зонда) ультразвукового решеточного зонда 10, независимо от того, где расположен ультразвуковой решеточный зонд 10.
[0178] Фиг. 26 является концептуальным продольным разрезом, объясняющим второй способ ультразвукового контроля для контроля контролируемого объекта, имеющего криволинейную поверхность, с использованием устройства ультразвукового контроля с линейным сканированием согласно первому варианту осуществления.
[0179] На фиг. 26, параллельные звуковые лучи однородно показаны в направлении преломления, которое определено для каждого из положений ультразвукового решеточного зонда 10.
[0180] В случае, показанном на фиг. 25 и фиг. 26, если результат в опорном положении отображен и назначен для ультразвукового решеточного зонда 10 для отображения продольно-глубинного интегрированного изображения Gt, то результаты в других положениях ультразвукового решеточного зонда 10 также могут быть назначены одновременно. Конечно, можно устанавливать угол преломления ультразвукового контроля в каждом положении ультразвукового решеточного зонда 10.
[0181] Согласно этому варианту осуществления, описанному выше, даже когда ультразвуковой решеточный зонд 10 имеет только небольшое число каналов, устройство 100 ультразвукового контроля с линейным сканированием может генерировать полное изображение, обеспечивая линейное сканирование широкой области, посредством перемещения ультразвукового решеточного зонда 10 с формированием области перекрытия и посредством адекватного регулирования изображения области перекрытия.
(Второй вариант осуществления)
[0182] Фиг. 27 является блок-схемой, показывающей конфигурацию устройства ультразвукового контроля с линейным сканированием согласно второму варианту осуществления.
[0183] Этот вариант осуществления является модификацией первого варианта осуществления. В первом варианте осуществления, ультразвуковой решеточный зонд 10 имеет множество ультразвуковых элементов 11, расположенных в направлении x (в первом направлении). Во втором варианте осуществления, ультразвуковой решеточный зонд 10 имеет множество ультразвуковых элементов 11, расположенных в направлении x и направлении y (во втором направлении) и образующих двумерную структуру. А именно, они образуют двумерную решетку (например, матричную решетку), и ультразвуковыми лучами можно также управлять в направлении глубины. Таким образом, переключатели 22 включают и выключают ультразвуковые элементы 11 в двумерном режиме. Вычислитель 30 дополнительно имеет генератор 37 глубинного изображения. Дисплей 60 может, таким образом, отображать глубинное изображение. В других отношениях второй вариант осуществления является идентичным первому варианту осуществления.
[0184] Фиг. 28A, 28B и 28C являются концептуальными видами, объясняющими продольно-широтно-глубинные контрольные изображения первого примера. В устройстве 100 ультразвукового контроля с линейным сканированием согласно этому варианту осуществления, которое показано на фиг. 27, ультразвуковой решеточный зонд 10 может сканировать контролируемый объект не только в направлении x, но и в направлении y. Фиг. 28 A, 28B и 28C показывают случай, когда контролируемый объект сканируется параллельными лучами, как в линейном сканировании.
[0185] Генератор 37 глубинного изображения генерирует данные широтно-глубинного изображения для отображения контрольного изображения Gyz, которое продолжается в направлениях y и z (а именно, изображения поперечного сечения y-z), таким же образом, как генератор 35 интегрированного изображения генерирует данные продольно-глубинного контрольного изображения для отображения контрольного изображения, которое продолжается в направлениях x и z (а именно, изображения поперечного сечения x-z).
[0186] В результате, во втором варианте осуществления генерируются данные трехмерного контрольного изображения для сканируемой области контролируемого объекта 1. Данные контрольного изображения запоминают в устройстве 41 хранения данных обработанных сигналов.
[0187] Фиг. 28А показывает продольно-глубинное контрольное изображение, включающее в себя поперечное сечение в направлениях x-z. А именно, фиг. 28А показывает продольно-глубинное изображение Gxza в первом установочном положении зонда, которое предполагает ультразвуковой решеточный зонд 10, и продольно-глубинное изображение Gxzb во втором установочном положении зонда, которое предполагает второй ультразвуковой решеточный зонд 10. Генератор 35 интегрированного изображения считывает данные контрольного изображения, представляющие поперечное сечение x-z, из устройства 41 хранения данных обработанных сигналов и генерирует данные продольно-глубинного изображения. Дисплей 60 отображает продольно-глубинное изображение.
[0188] Продольно-глубинное изображение Gxza и продольно-глубинное изображение Gxzb частично перекрываются, и каждое из них имеет взаимно перекрывающуюся часть. Для перекрывающихся частей, регулятор 36 области перекрытия определяет условия генерирования, при которых генератор 35 интегрированного изображения генерирует данные для продольно-глубинного контрольного изображения Gxzd.
[0189] Фиг. 28В показывает широтно-глубинное контрольное изображение Gyza, которое включает в себя синтезированную форму М волны, существующую в части продольно-глубинного контрольного изображения Gxza, и которое параллельно оси y. Широтно-глубинное контрольное изображение Gyza сформировано не в плоскости y-z, а в плоскости, которая наклонена к плоскости y-z. Однако, его называют «изображением Gyza» для удобства. А именно, широтно-глубинное контрольное изображение Gyza получают посредством проецирования, в направлении x, изображения перпендикулярно плоскости x-z и продолжения в плоскости, включающей в себя звуковые лучи Pa.
[0190] Фиг. 28С подобна фиг. 28В и показывает широтно-глубинное контрольное изображение Gyzb, которое включает в себя синтезированную форму М волны, существующую в части продольно-глубинного контрольного изображения Gxzb, и которое параллельно оси y. Подобно широтно-глубинному контрольному изображению Gyza, широтно-глубинное контрольное изображение Gyzb получают посредством проецирования, в направлении x, изображения перпендикулярно плоскости x-z и продолжения в плоскости, включающей в себя звуковые лучи Pb.
[0191] Фиг. 29A, 29B и 29C являются концептуальными видами, объясняющими продольно-глубинное и широтно-глубинное контрольные изображения второго примера. Фиг. 29A, 29B и 29C показывают контрольные изображения, показанные на фиг. 28A, 28B и 28C, но полученные посредством сканирования веерообразными лучами.
[0192] Фиг. 30 является концептуальным видом в перспективе, показывающим сопло, используемое в устройстве ультразвукового контроля с линейным сканированием согласно этому варианту осуществления. Как показано на фиг. 30, сопло 4 имеет свою ось вращения, продолжающуюся в направлении z, и имеет радиальное направление r и круговое направление θ.
[0193] Основание сопла 4 имеет трехмерную криволинейную поверхность. Ультразвуковой решеточный зонд 10 располагают таким образом, что его продольное направление устанавливается в круговом направлении θ сопла 4. Ультразвуковой решеточный зонд 10 сдвигают в направлении θ, определяя области, взаимно перекрывающиеся в одном положении в направлении z. Затем, каждый раз, когда зонд 10 совершает оборот в направлении θ, его затем сдвигают в направлении z, определяя область, перекрывающую область, определенную ранее. Таким образом, зонд 10 проверяет сопло 4 при необходимости, после повторения этих этапов.
[0194] Фиг. 31 является концептуальным видом, объясняющим, как сопло проверяется в его круговом направлении. Более конкретно, фиг. 31 показывает, как ультразвуковой решеточный зонд 10 перемещают на сопле в направлениях r и θ в первом установочном положении зонда, втором установочном положении зонда (опорное положение) и третьем установочном положении зонда. Фиг. 32 является концептуальным видом, объясняющим, как ультразвуковой решеточный зонд перемещают в аксиальном направлении сопла. А именно, фиг. 32 показывает, как ультразвуковой решеточный зонд 10 перемещают в направлениях r и θ для выполнения его функции в установочных положениях В1 и В2 зонда, разнесенных в направлениях r и z.
[0195] Генератор 35 интегрированного изображения вычисляет данные изображения в направлении θ. Генератор 37 глубинного изображения вычисляет данные изображения в направлении z. Регулятор 36 области перекрытия определяет условия регулирования областей, перекрывающихся в направлении θ, и выводит эти условия для генератора 35 интегрированного изображения. Регулятор 36 области перекрытия дополнительно определяет условия регулирования областей, перекрывающихся в направлении z, и выводит эти условия для генератора 37 глубинного изображения.
[0196] Условия регулирования области перекрытия могут быть определены посредством выбора из различных способов. В одном способе, значения времени задержки вычисляют на основании формы поверхности, определяемой в одном установочном положении зонда. В другом способе, перекрывающиеся изображения формируют с использованием синтезированных форм волн, получаемых в обоих установочных положениях зонда. Еще в одном способе, синтезированные формы волн, полученные в обоих установочных положениях зонда и расположенные в одном и том же положении, синтезируют друг с другом. Один из этих способов, который считается наиболее подходящим, выбирают согласно различным условиям, принимаемым извне через вход 70 или запомненным в регуляторе 36 области перекрытия.
[0197] Как описано выше, устройство 100 ультразвукового контроля с линейным сканированием согласно второму варианту осуществления может выполнять трехмерное линейное сканирование с использованием ультразвукового решеточного зонда, который имеет меньшее число каналов.
(Другие варианты осуществления)
[0198] Таким образом, в то время как были описаны варианты осуществления настоящего изобретения, эти варианты осуществления представлены в качестве примеров и не предназначены для ограничения объема настоящего изобретения. Например, хотя в вышеупомянутых вариантах осуществления в качестве примера была приведена горизонтальная индукционная вращающаяся электрическая машина, настоящее изобретение может быть применено к вертикальной индукционной вращающейся электрической машине. Дополнительно, настоящее изобретение может быть применено не только к индукционной вращающейся электрической машине, но и к синхронной вращающейся электрической машине. Дополнительно, в то время как в вышеупомянутых вариантах осуществления в качестве примера была приведена вращающаяся электрическая машина полностью закрытого типа, настоящее изобретение может быть применено к вращающейся электрической машине открытого типа. А именно, настоящее изобретение обеспечивает, в кольцевом пространстве, расположенном между сердечником ротора и сердечником статора, эффект вентилятора, генерируемый при вращении сердечника ротора, и этот эффект не зависит от различия этих типов вращающейся электрической машины.
[0199] Кроме того, описанные выше варианты осуществления могут быть использованы различными разными способами и, если это целесообразно, любые их компоненты могут быть опущены, заменены или изменены различными разными способами, не выходя за рамки сущности и объема настоящего изобретения. Все описанные выше варианты осуществления и их модификации находятся в пределах сущности и объема настоящего изобретения, которое конкретно определено прилагаемой формулой изобретения, а также ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ И СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ | 2019 |
|
RU2702804C1 |
| УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП, СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ И СПОСОБ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЯ | 2018 |
|
RU2682983C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ДЕФЕКТНОСТИ МЕТАЛЛИЧЕСКОГО ИЗДЕЛИЯ | 2019 |
|
RU2723368C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С АДАПТИВНЫМ ФОРМИРОВАТЕЛЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ И СПОСОБ УЛЬТРАЗВУКОВОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С АДАПТИВНЫМ ФОРМИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2011 |
|
RU2550145C2 |
| Способ ультразвукового контроля изделий | 2016 |
|
RU2622459C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СТРУКТУРЫ МАТЕРИАЛА | 2010 |
|
RU2442154C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ЭКВИДИСТАНТНЫМИ ПОВЕРХНОСТЯМИ | 2020 |
|
RU2725705C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ | 2007 |
|
RU2381497C2 |
| Способ ультразвукового томографического контроля изделий | 1990 |
|
SU1817019A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТВЕРДЫМ КОНТАКТНЫМ ЭЛЕМЕНТОМ | 2008 |
|
RU2469312C2 |
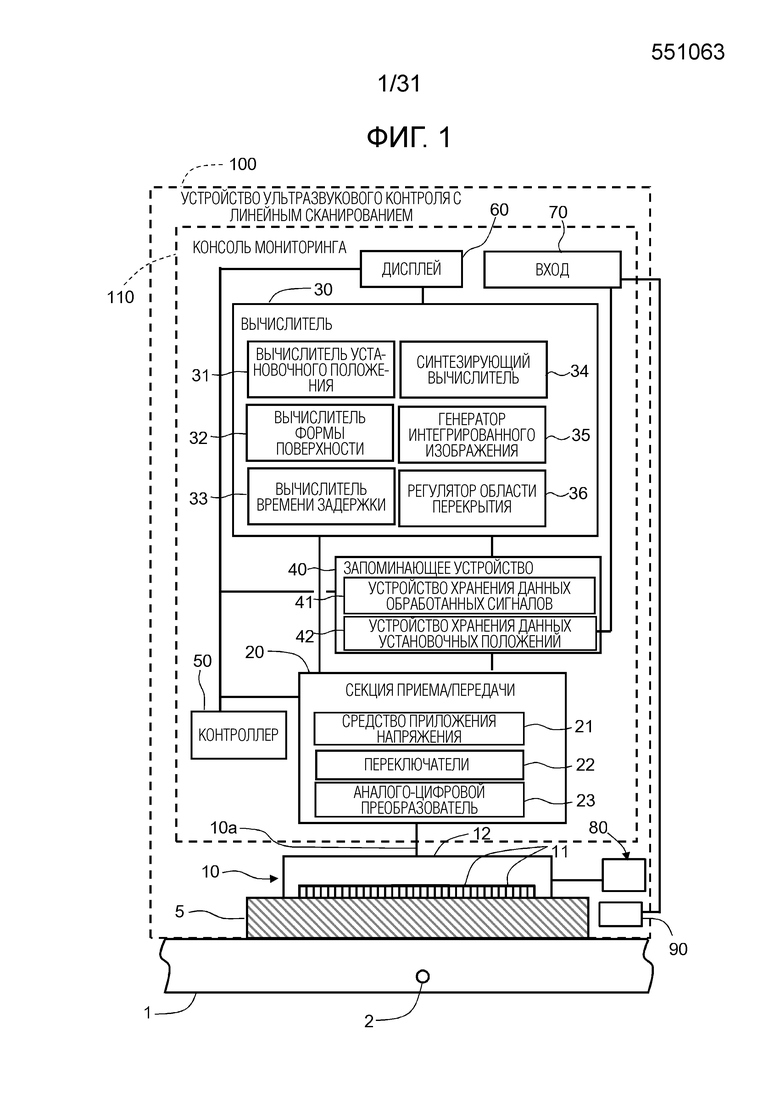
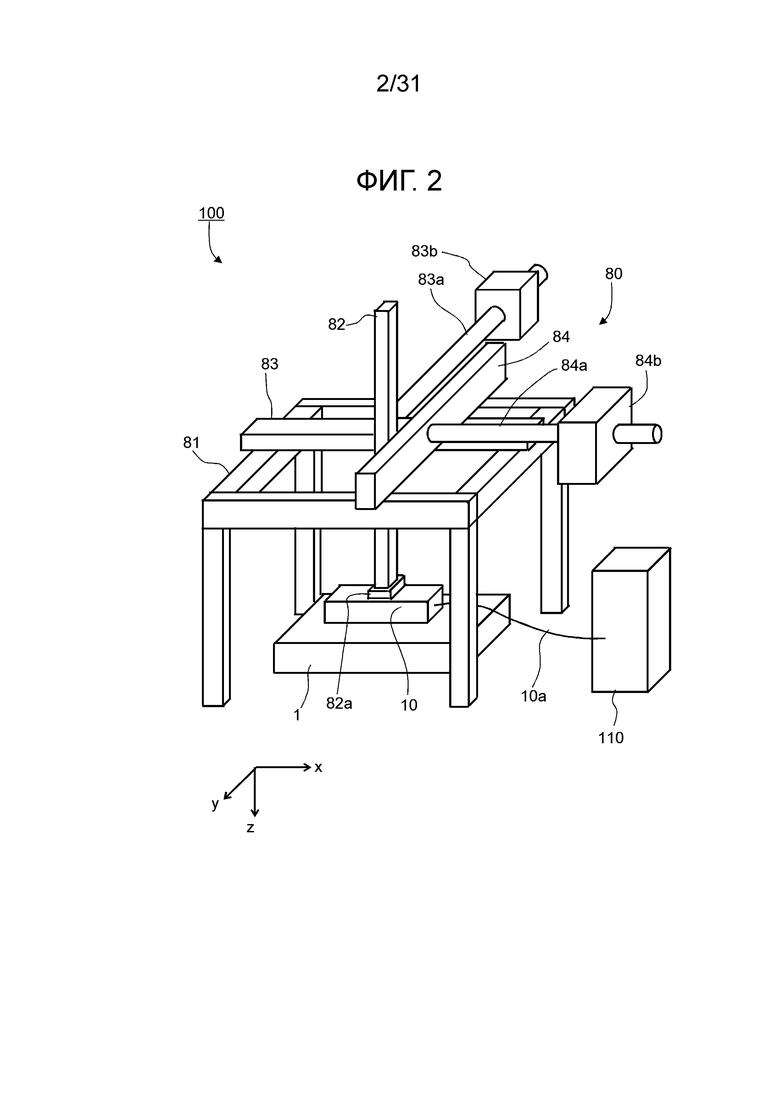
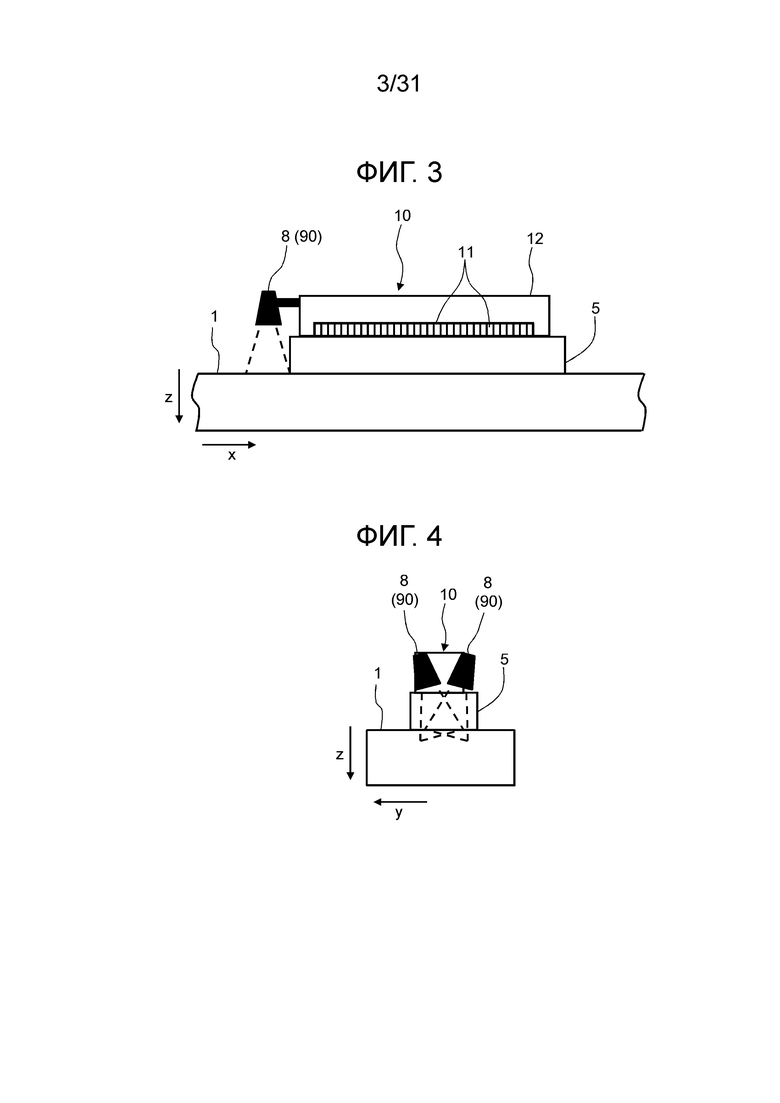
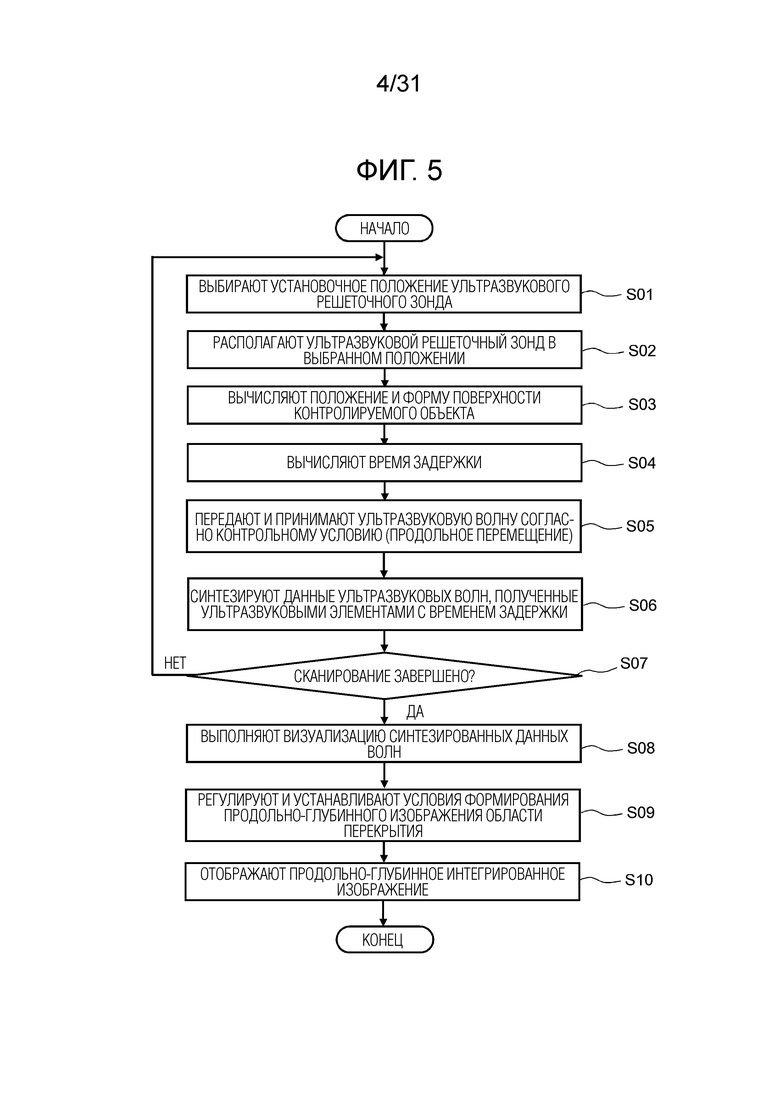
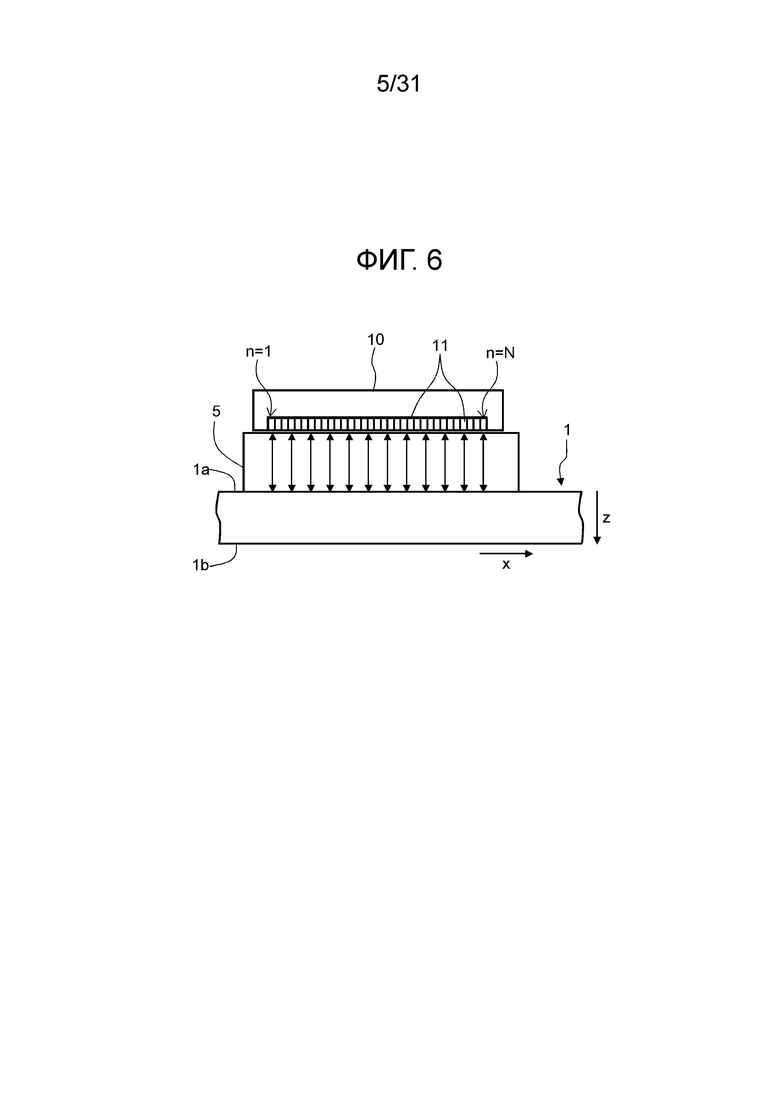
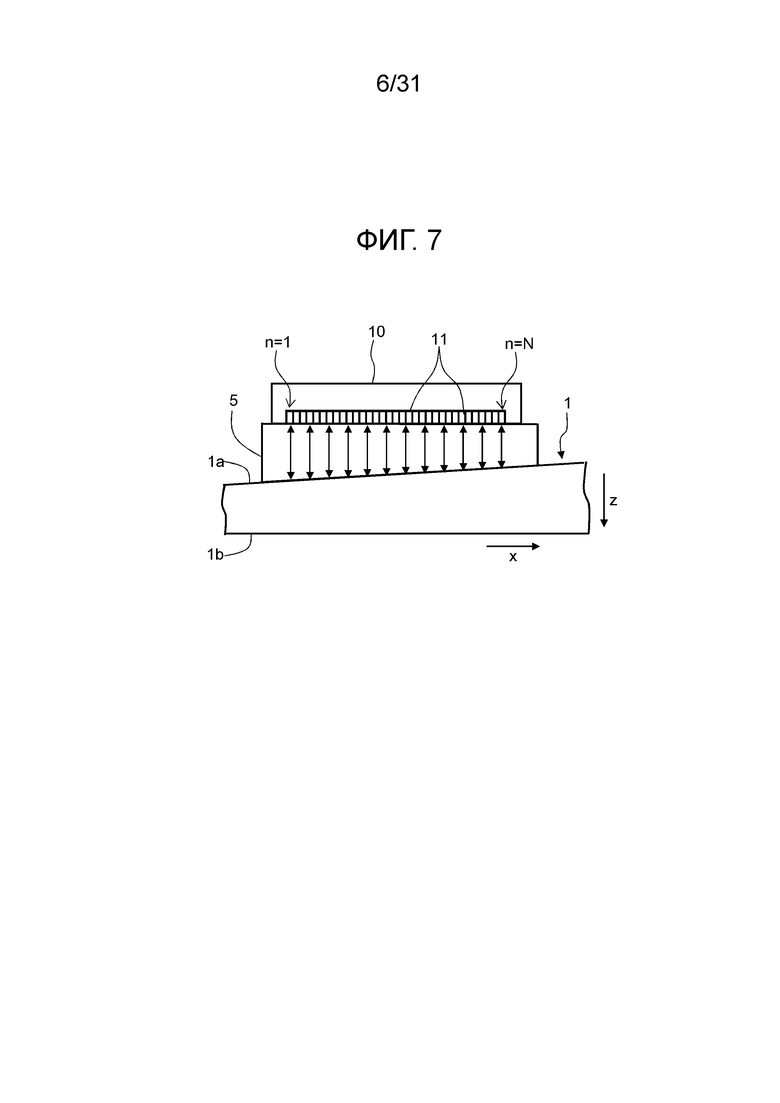
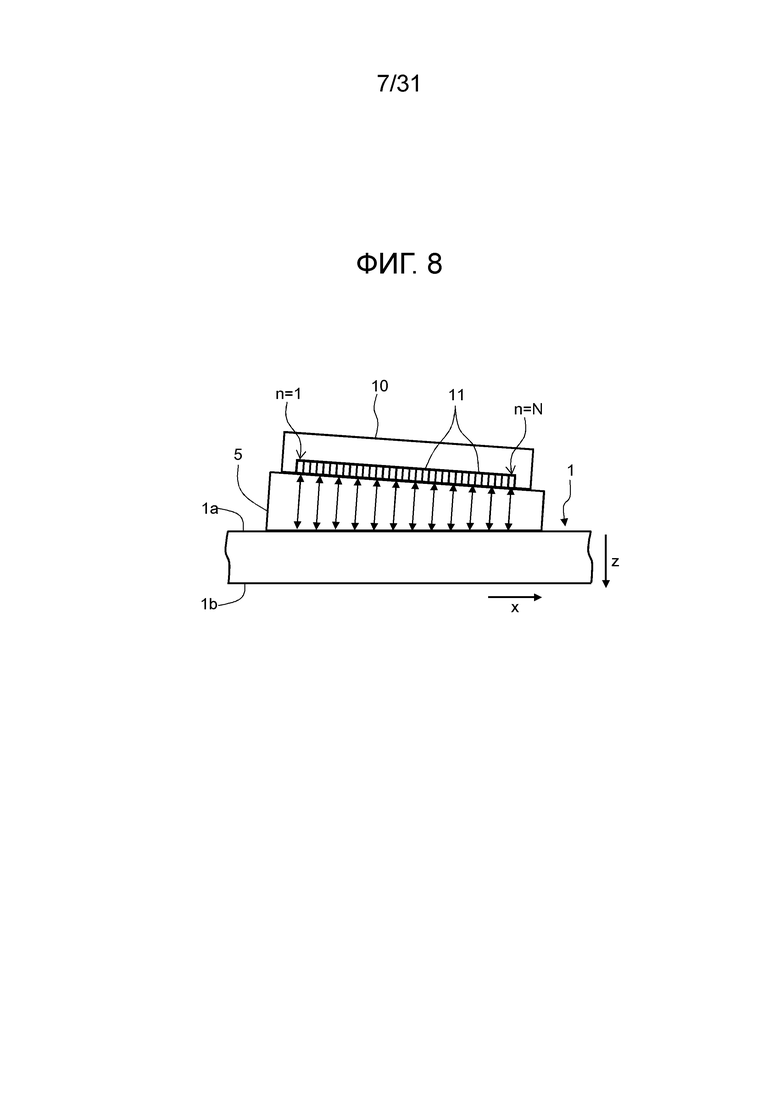
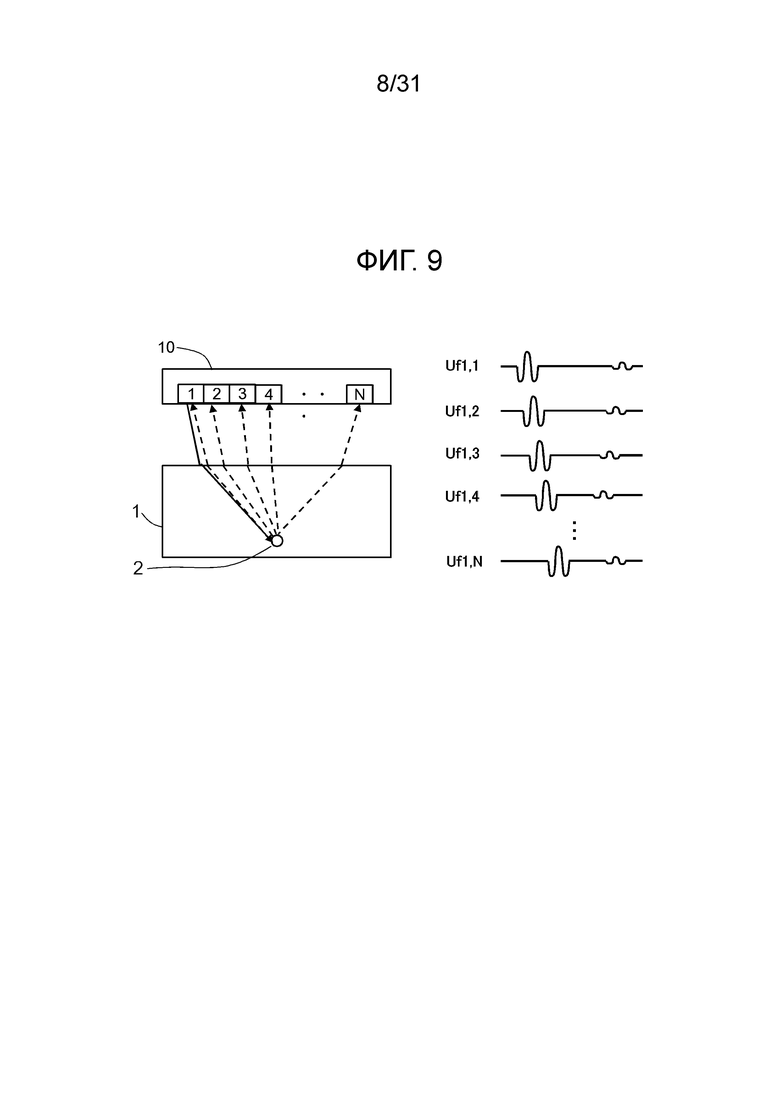
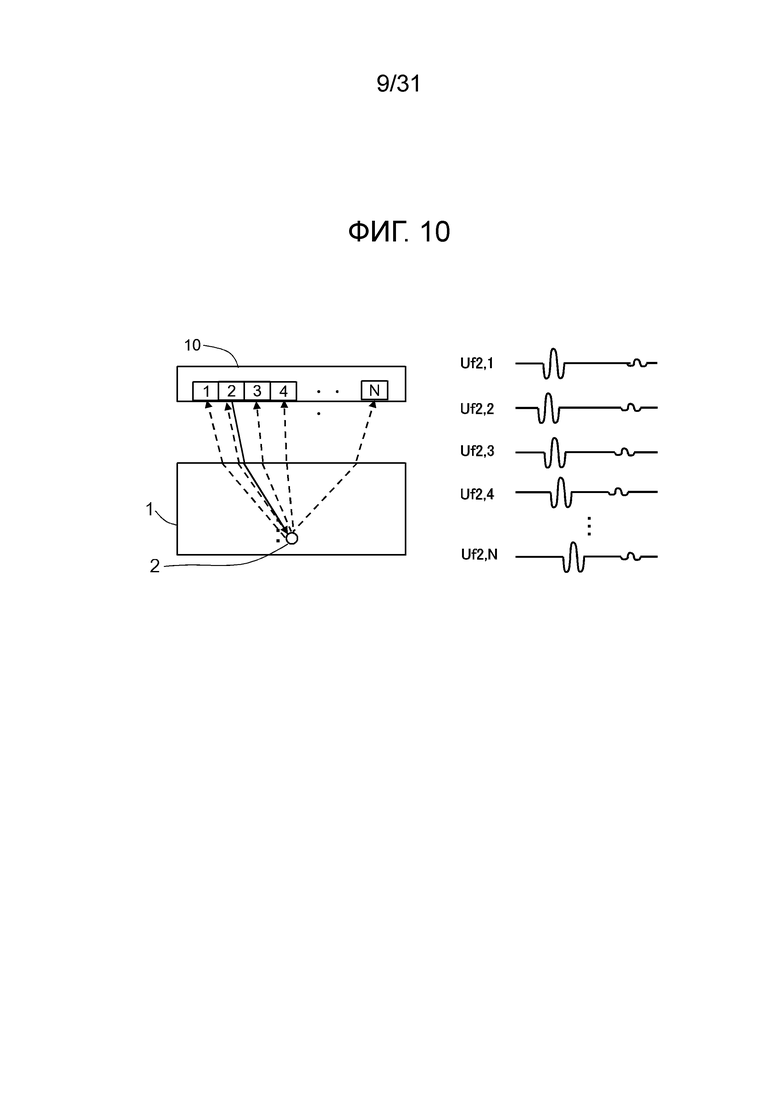
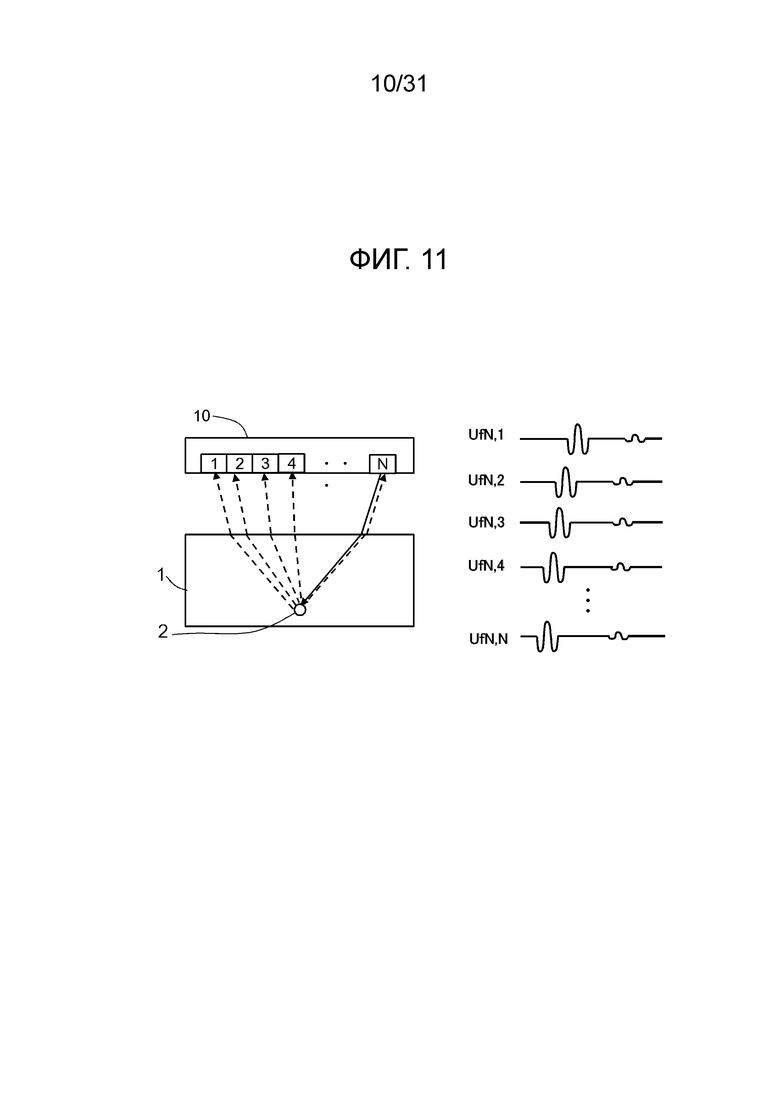
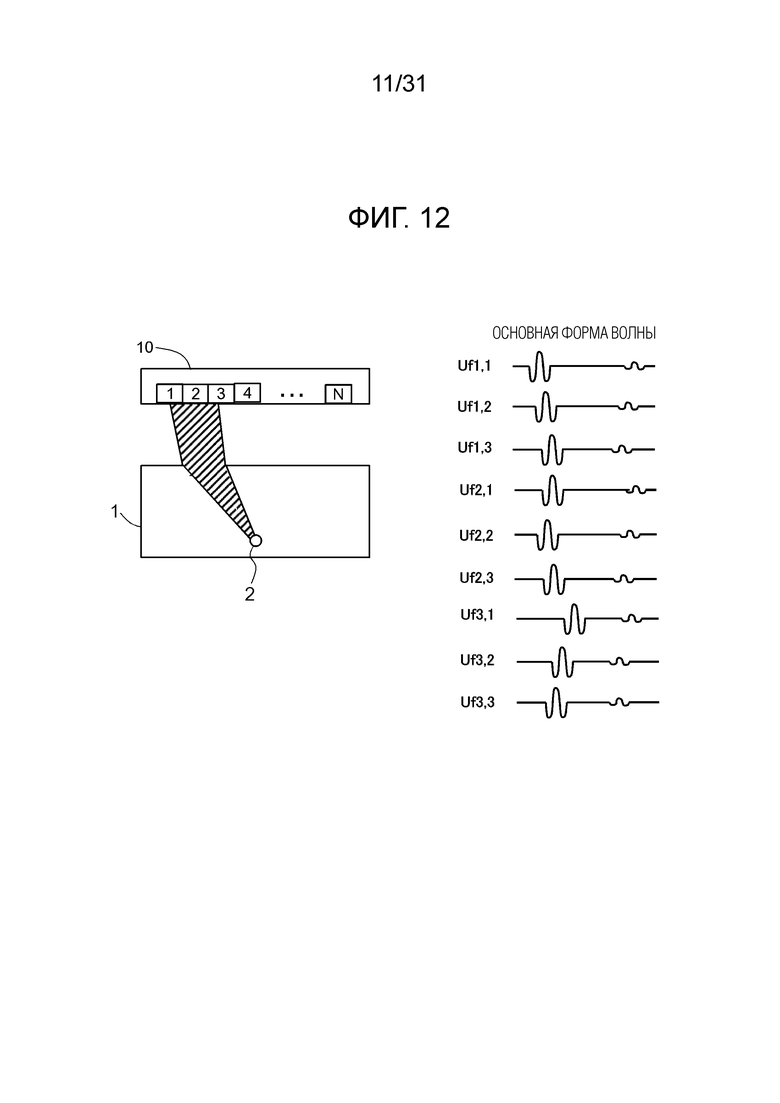
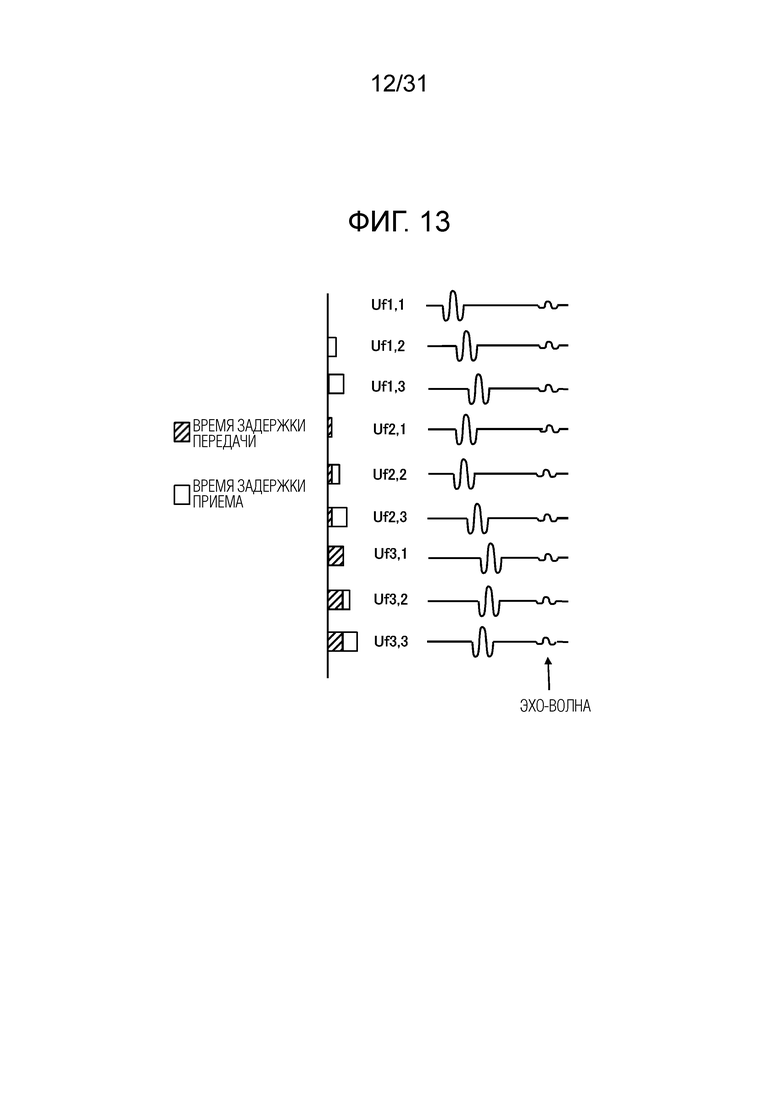
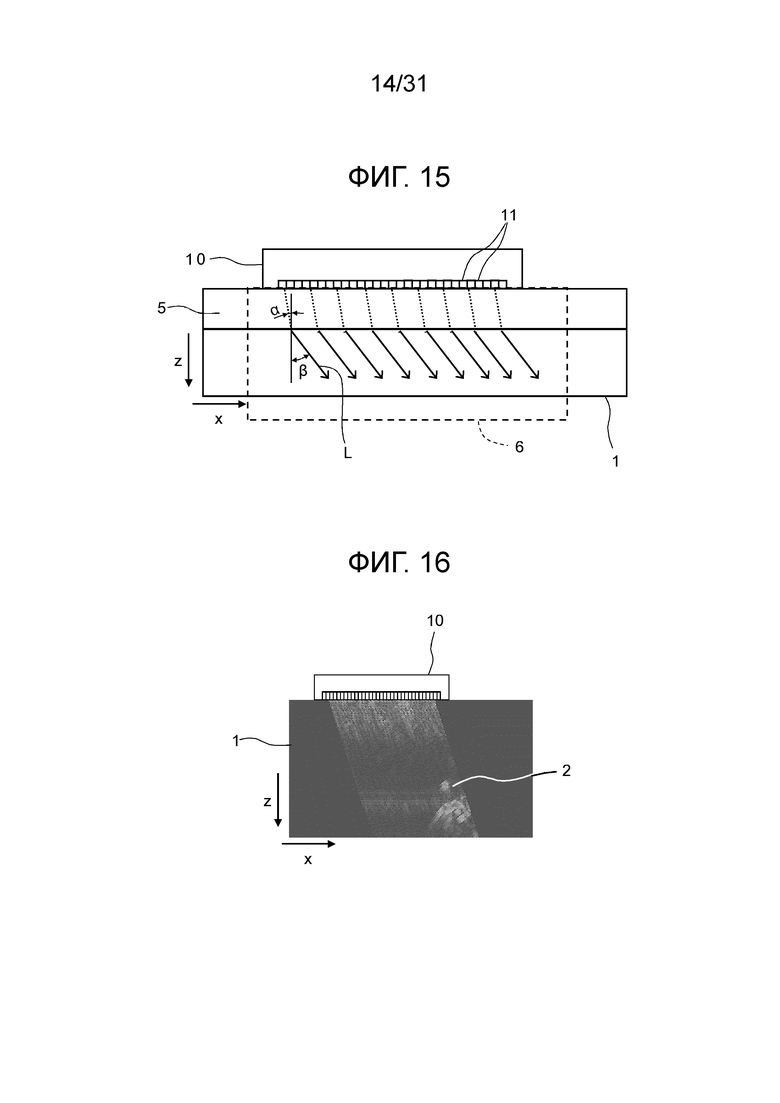
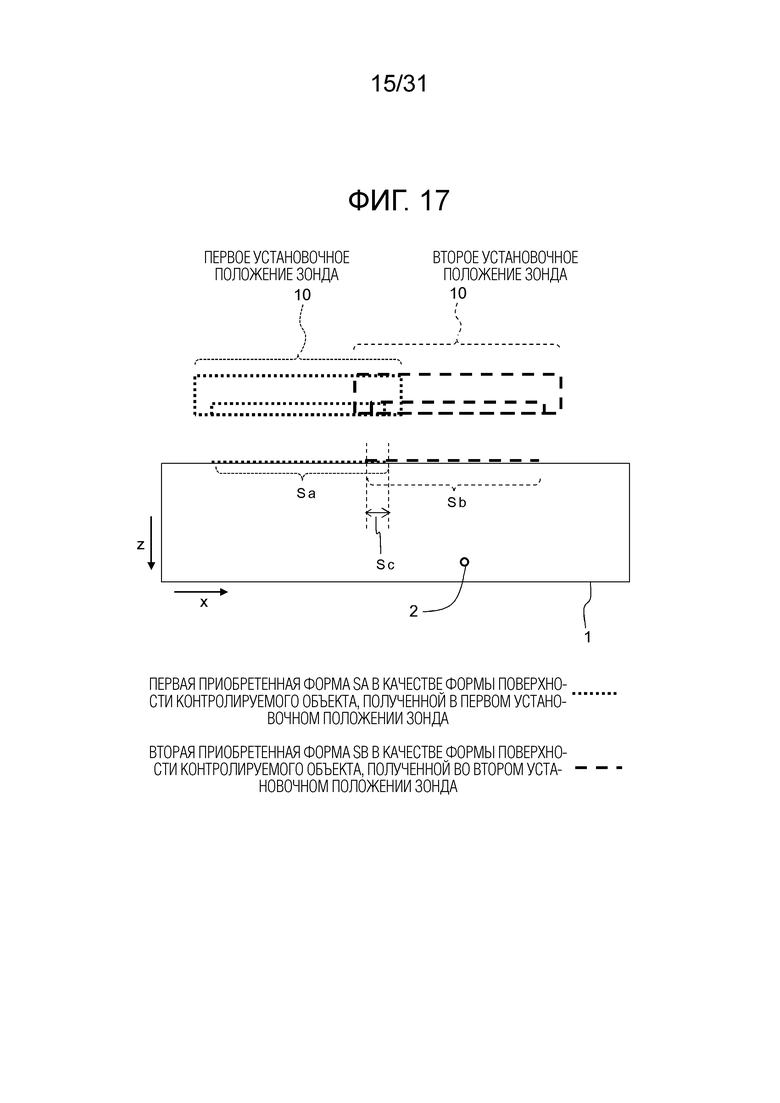
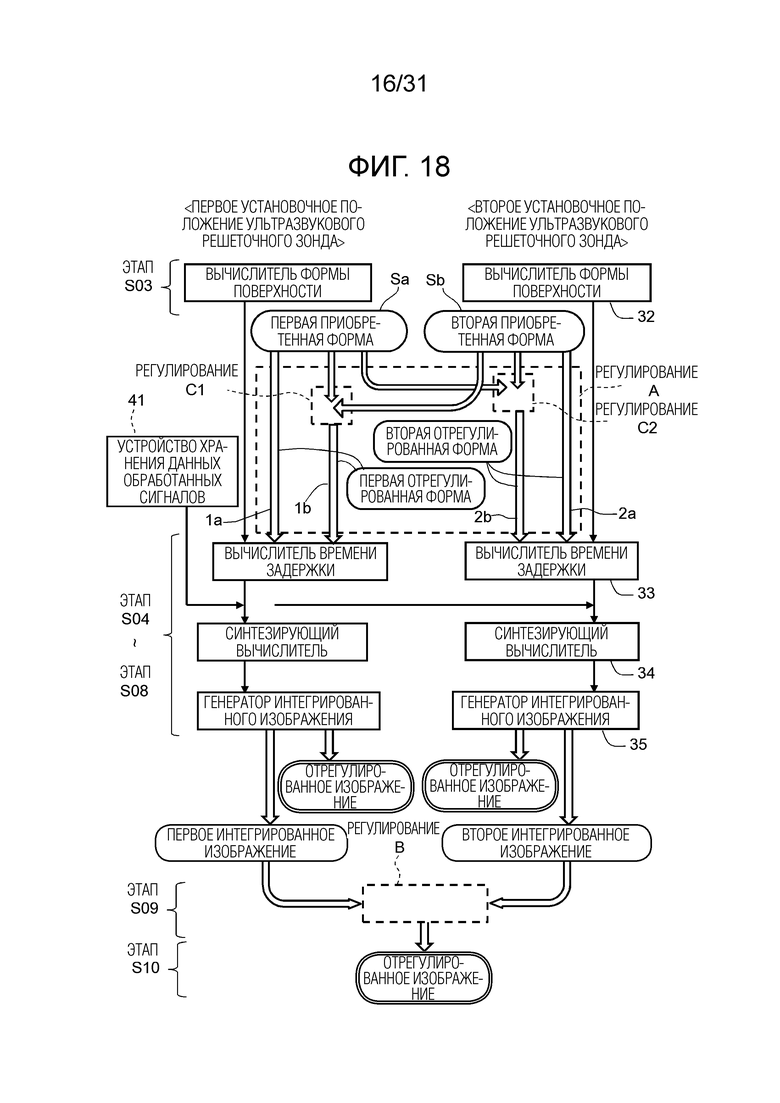
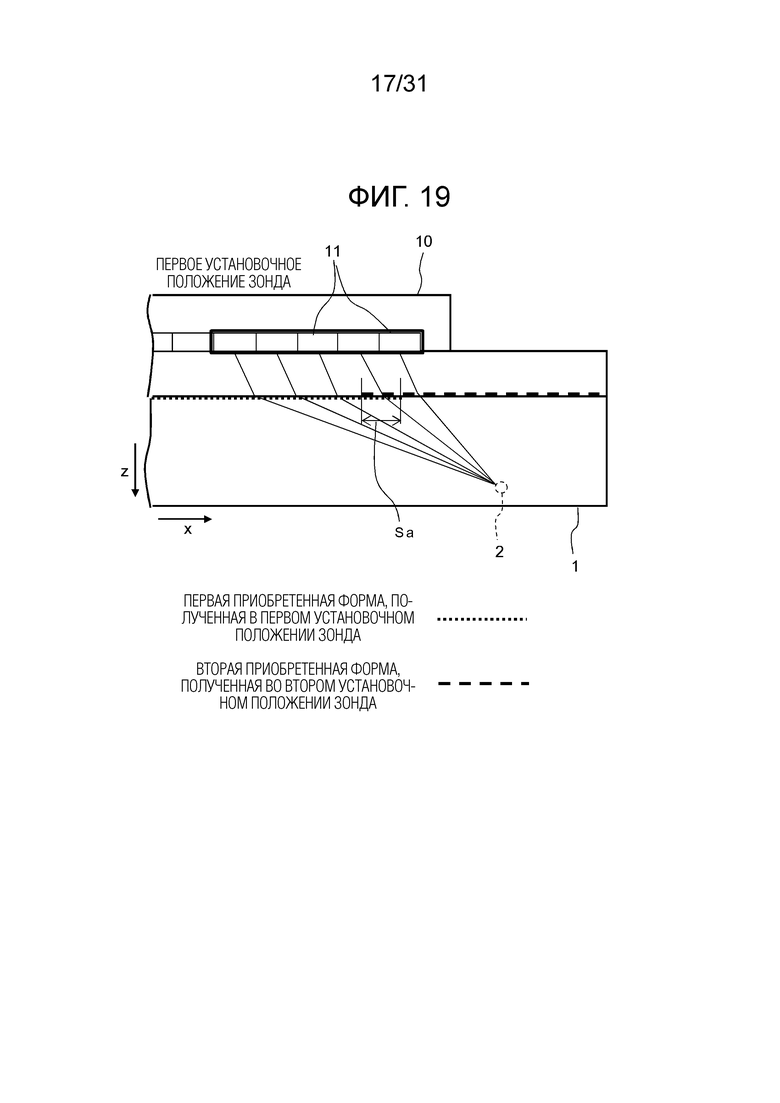
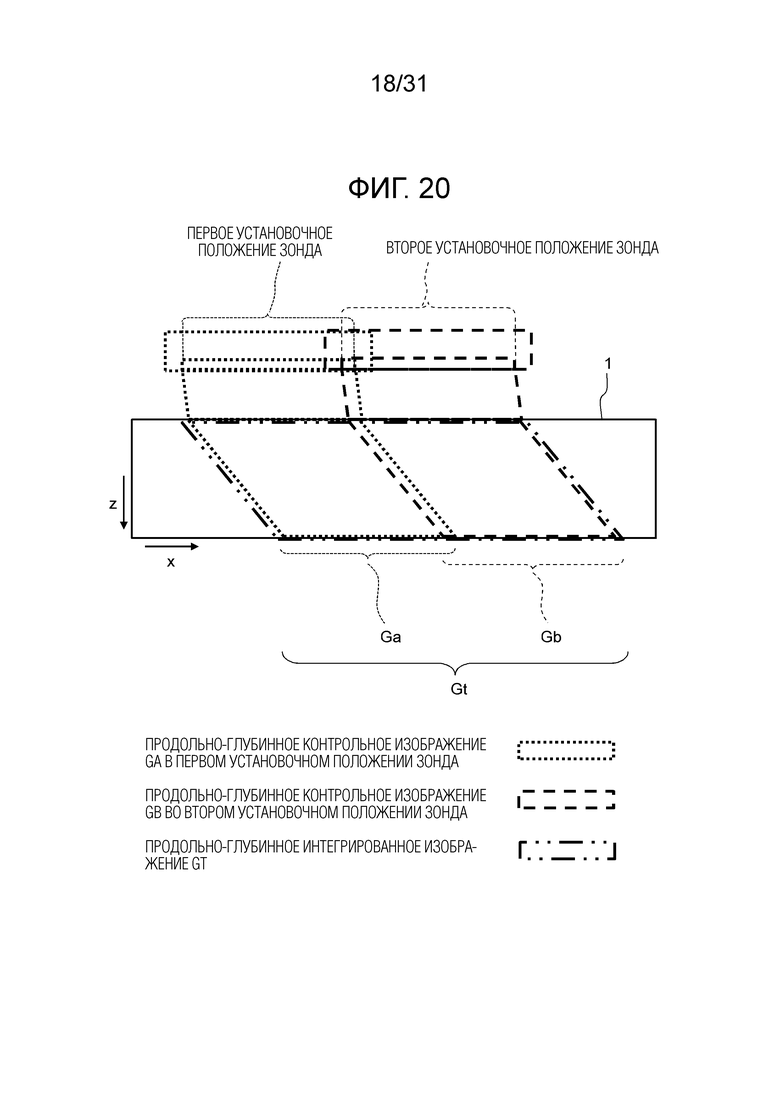
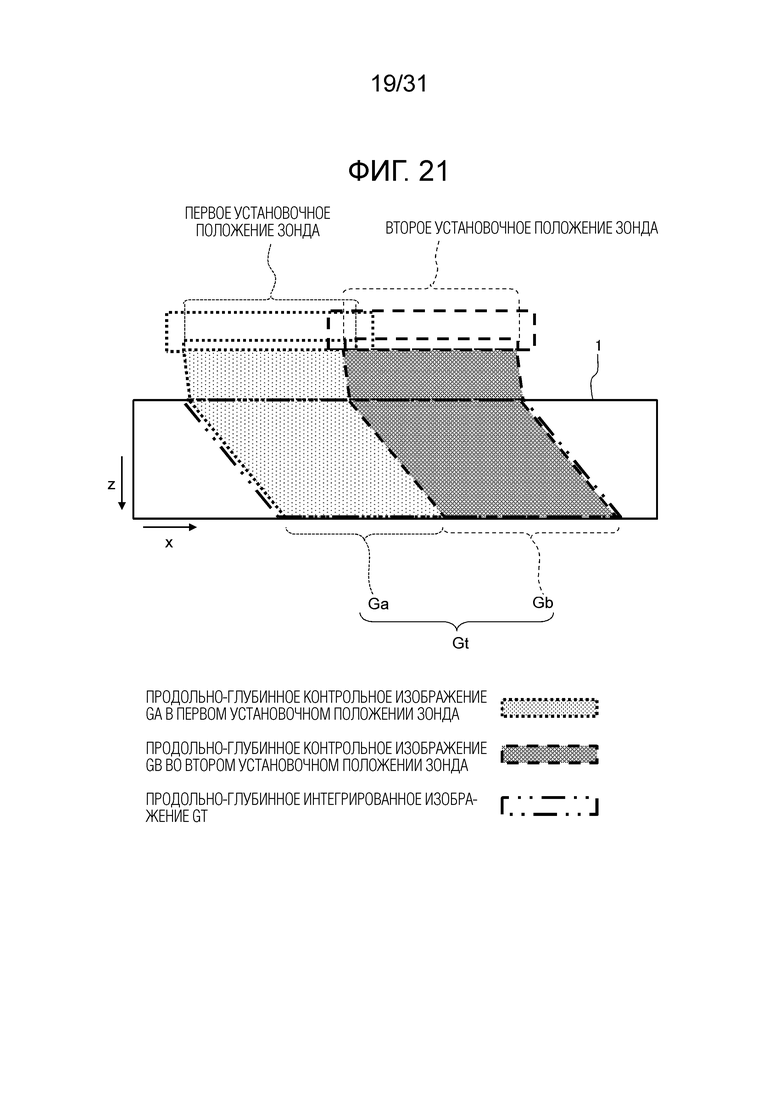
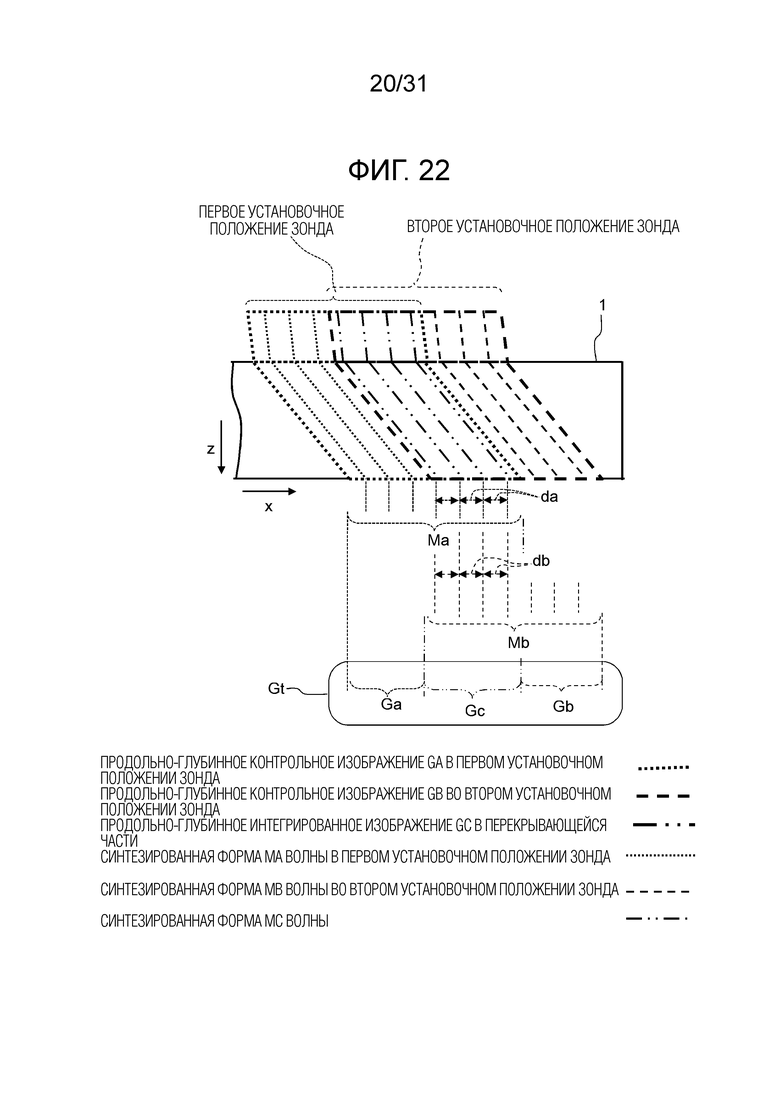
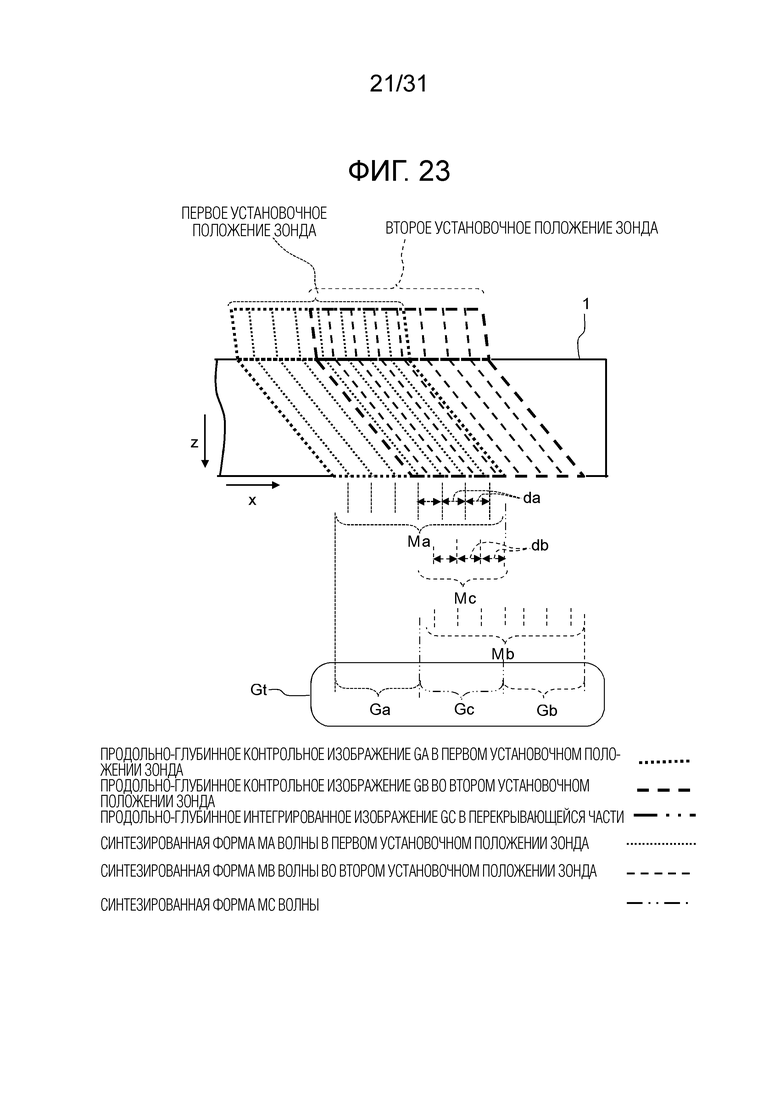
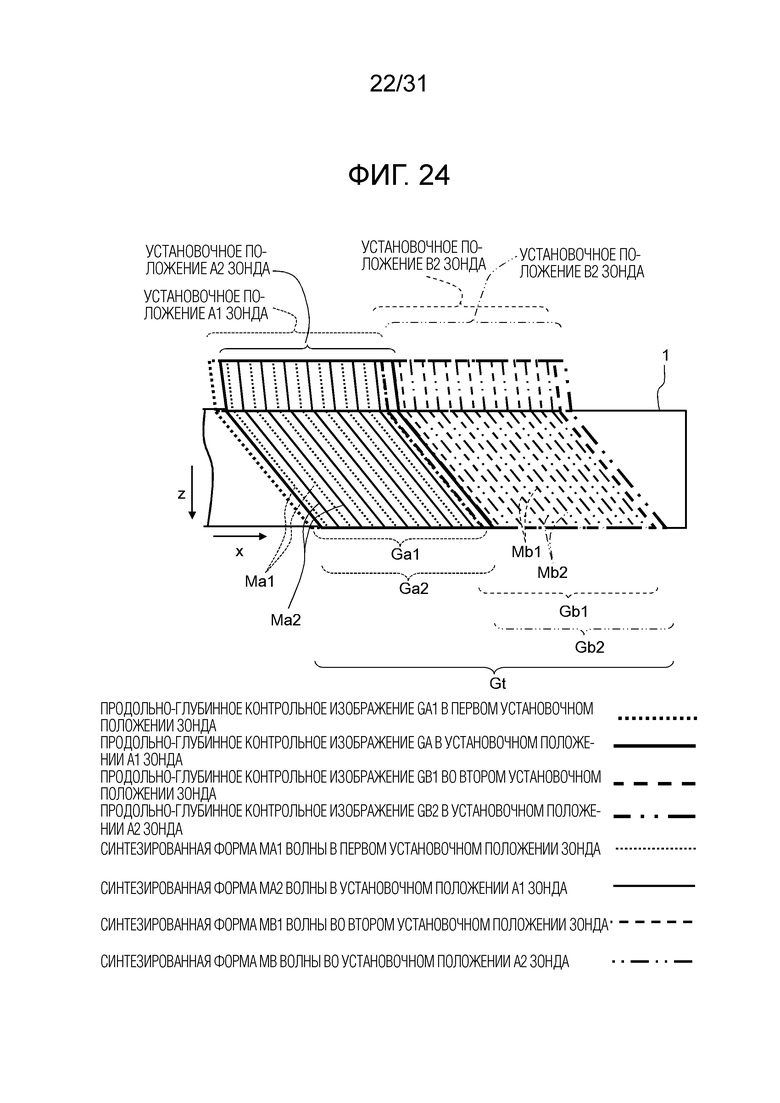
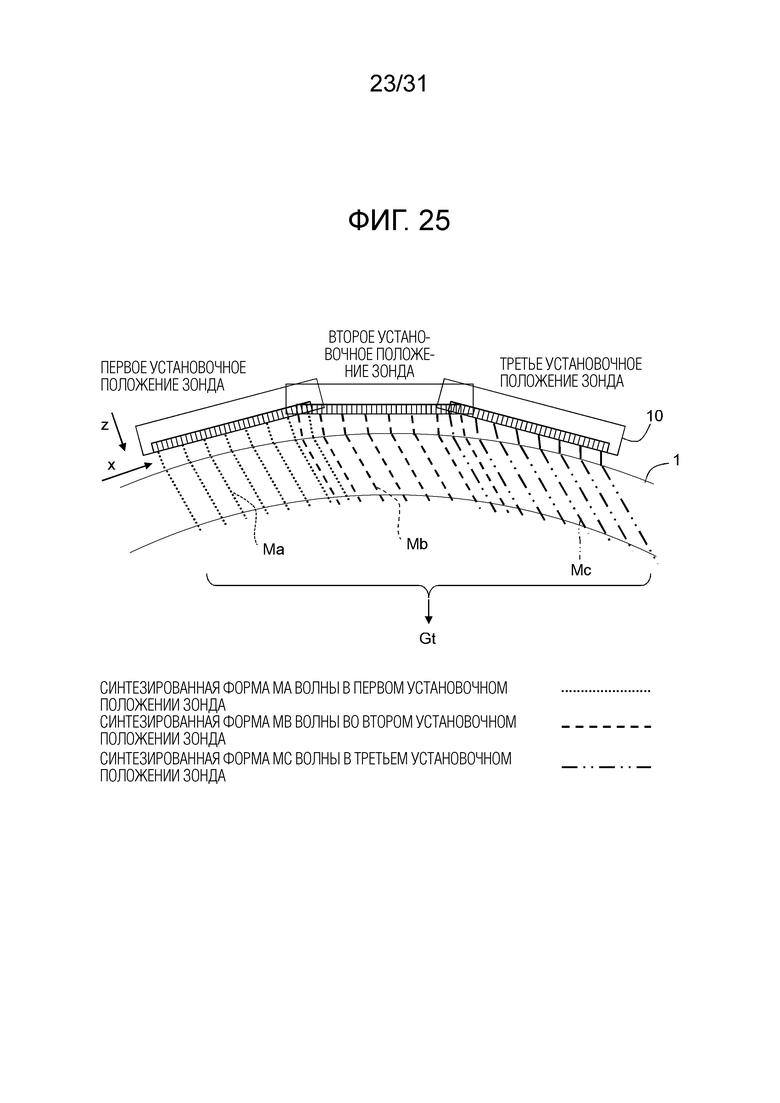
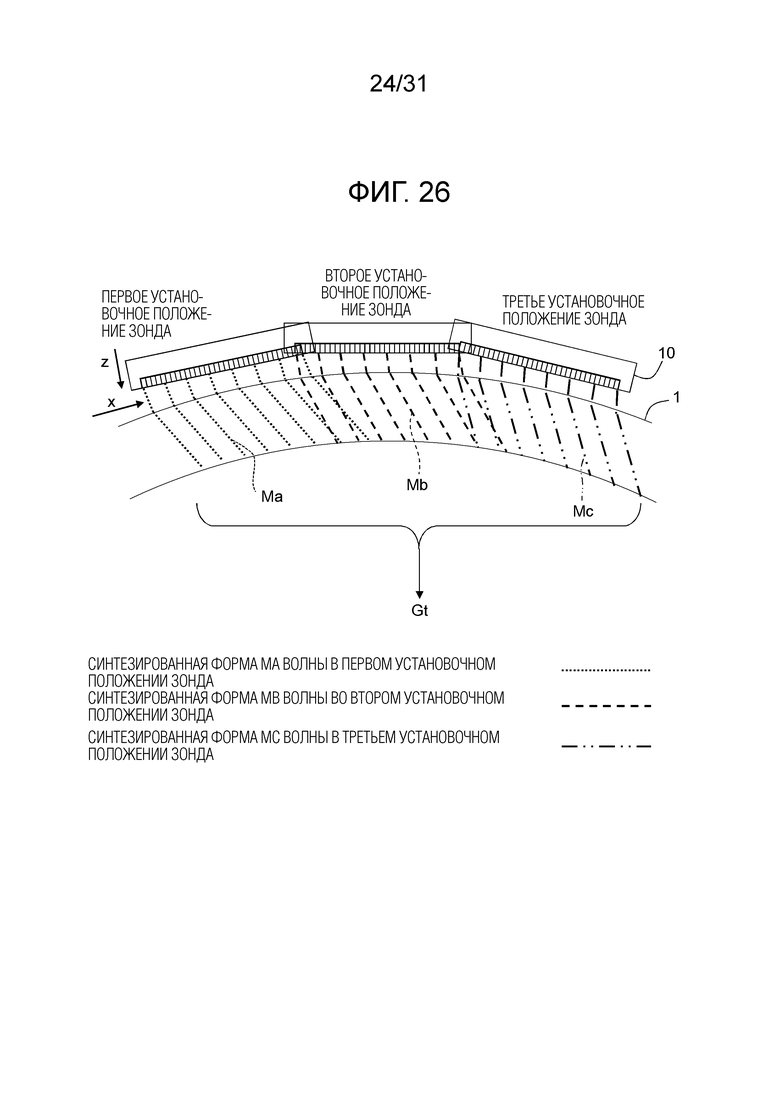
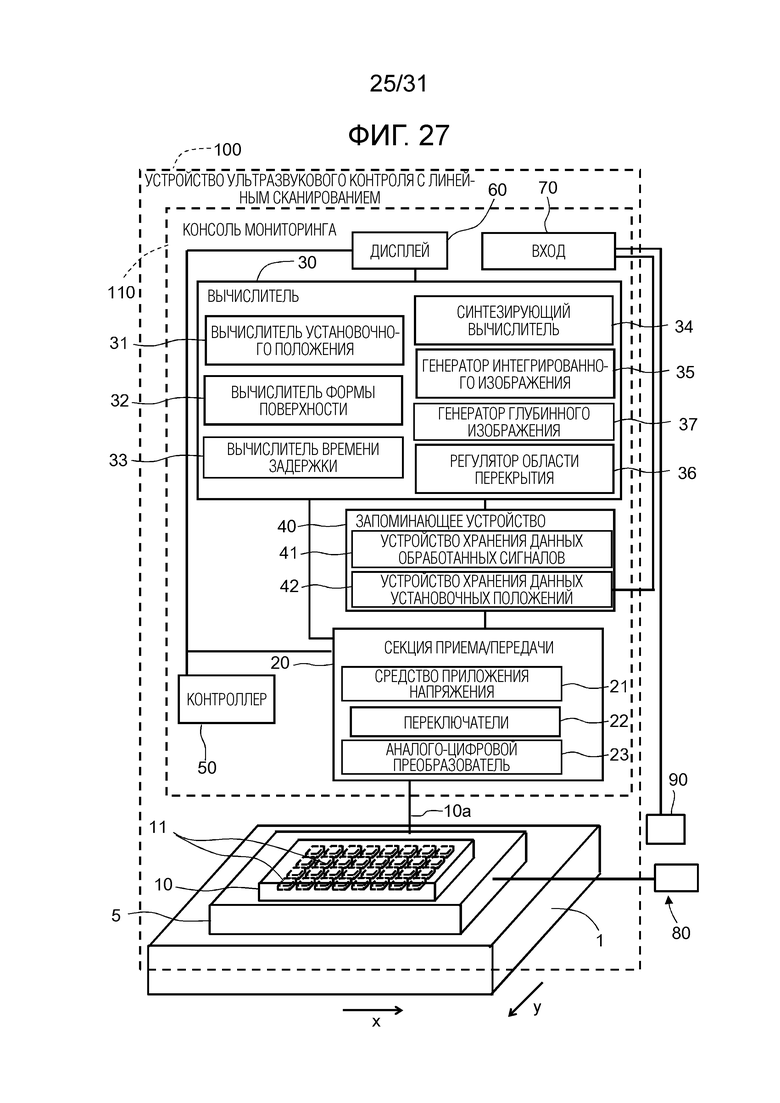
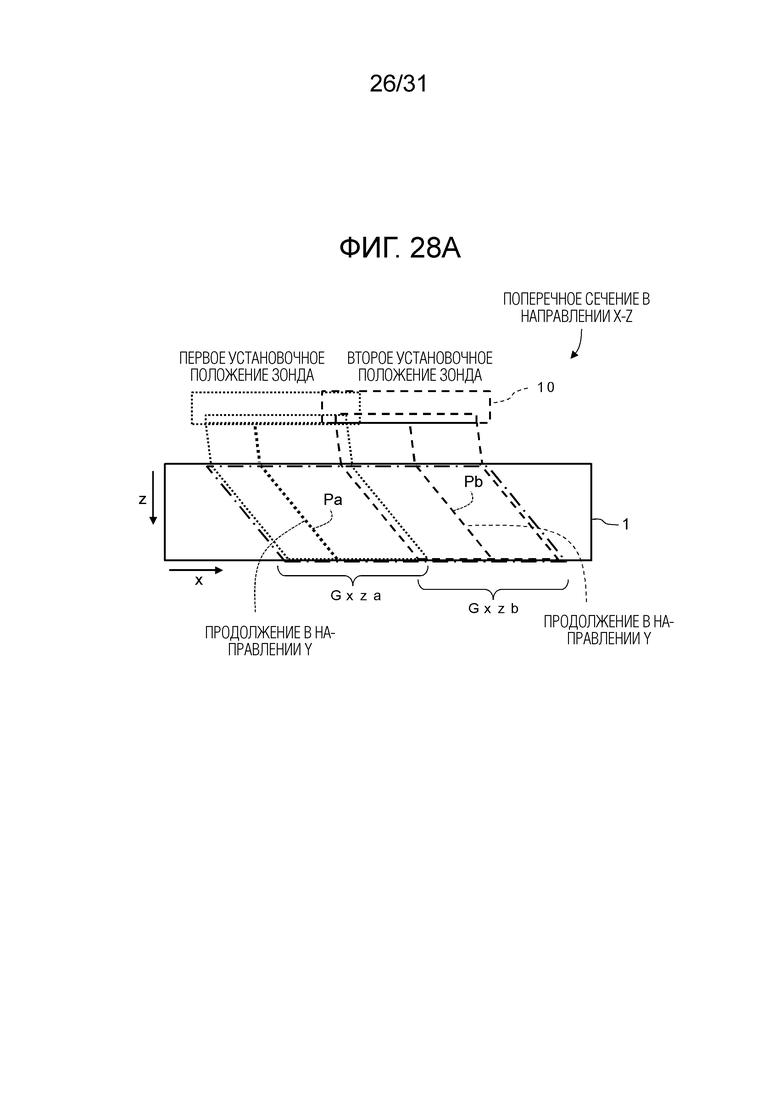
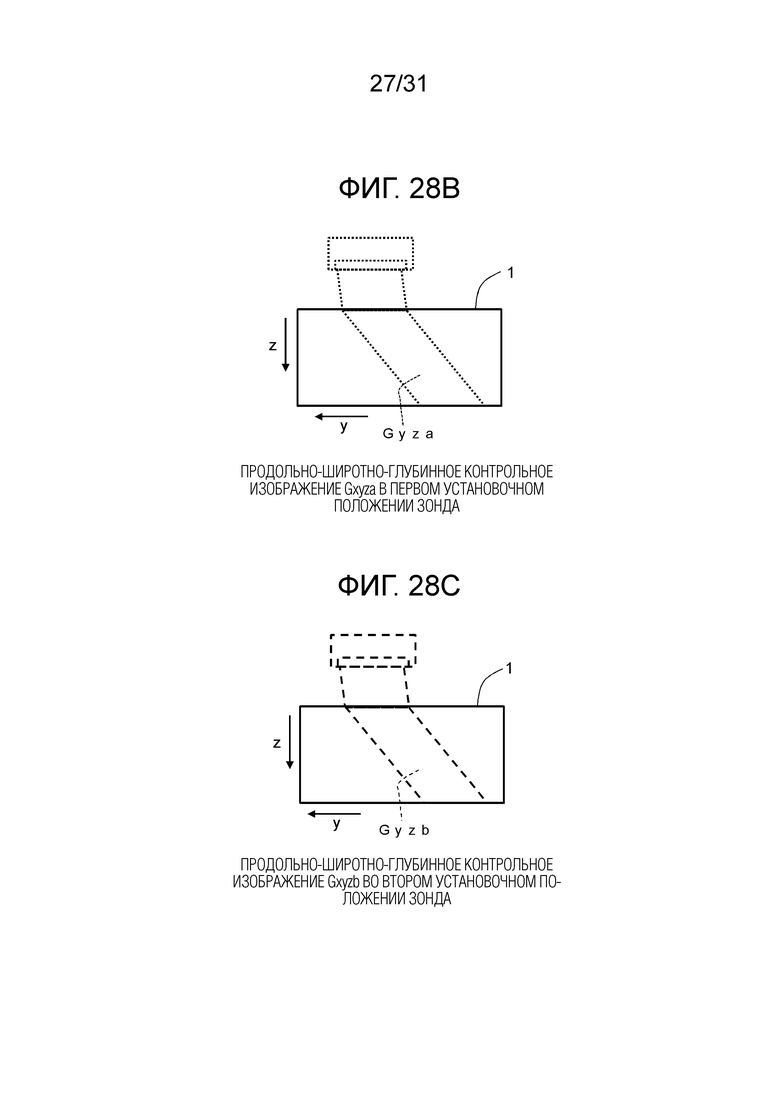
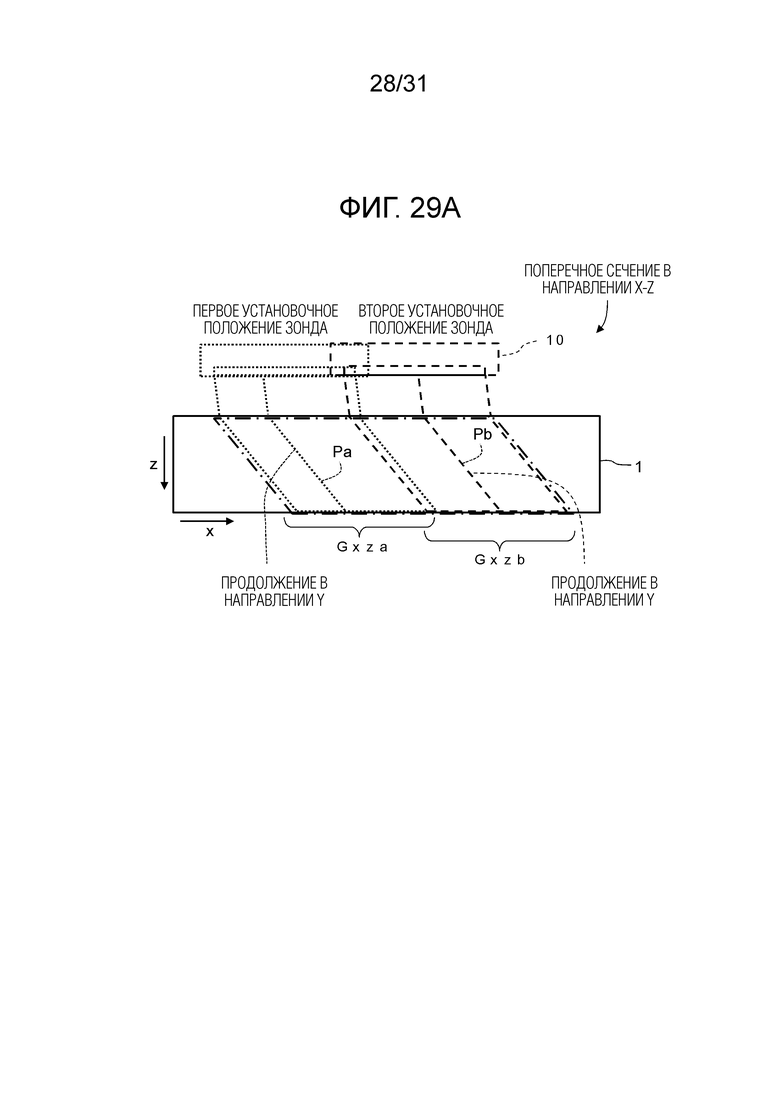
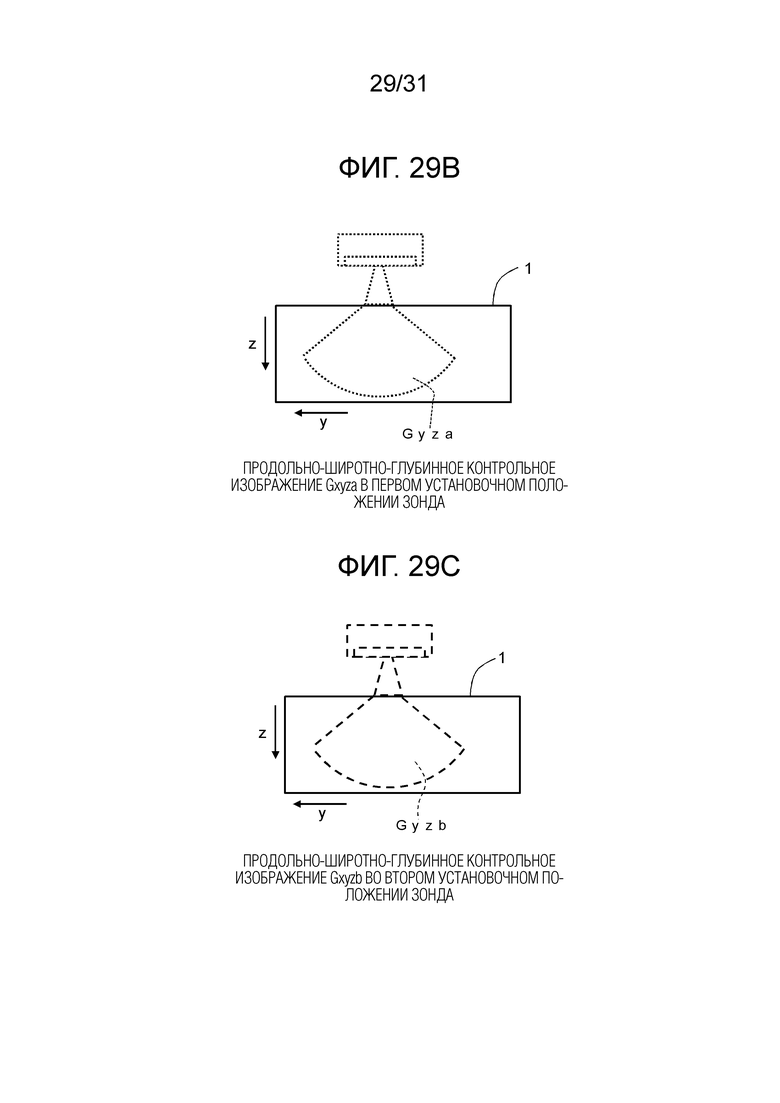
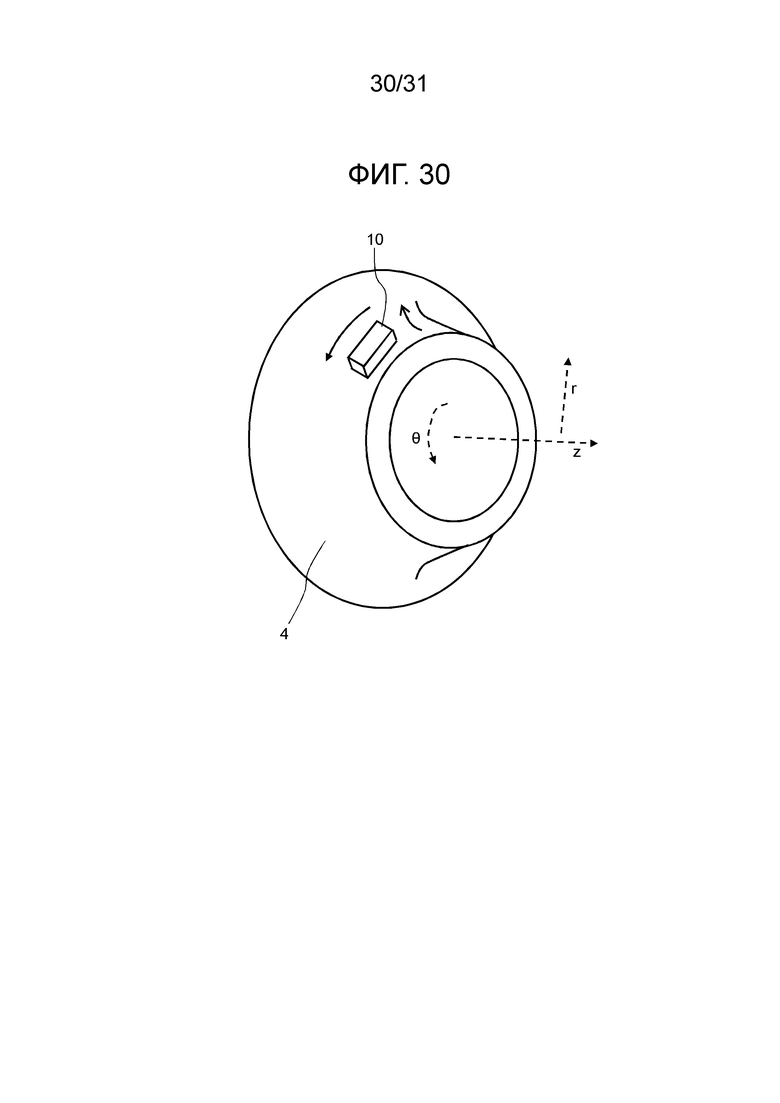
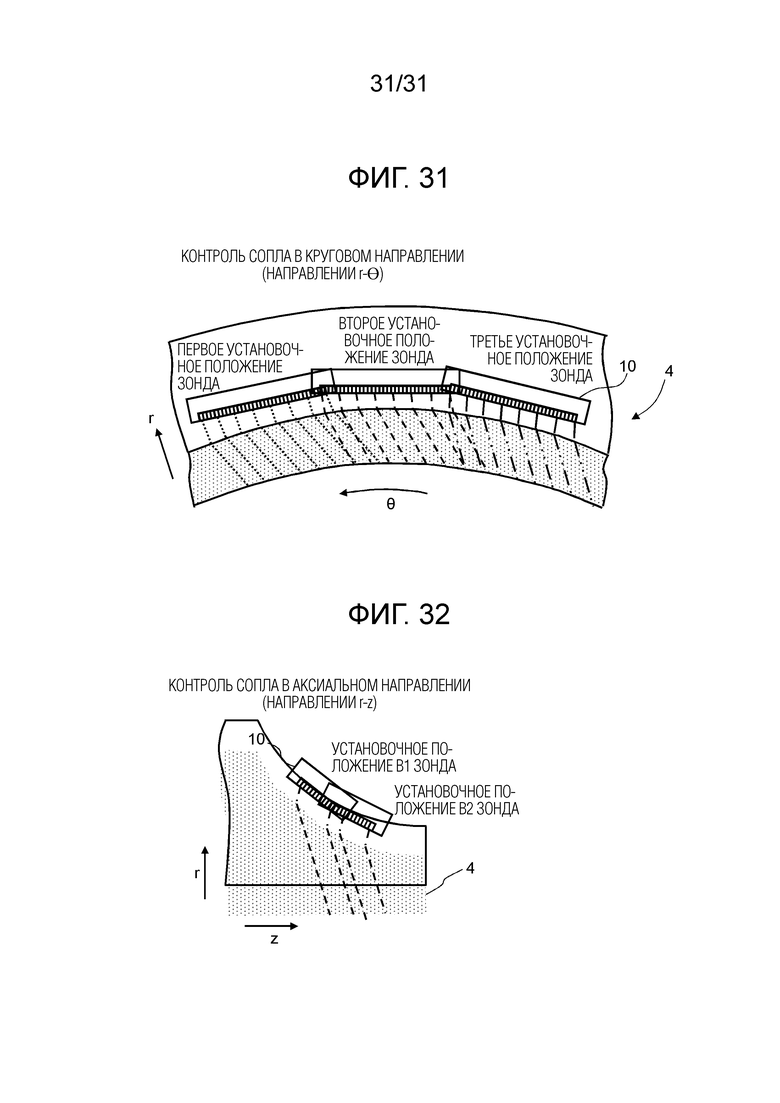
Использование: для ультразвукового контроля. Сущность изобретения заключается в том, что устройство ультразвукового контроля с линейным сканированием содержит: ультразвуковой решеточный зонд, имеющий множество ультразвуковых элементов, выровненных в первом направлении; вычислитель времени задержки, выполненный с возможностью вычисления, относительно формы поверхности контролируемого объекта, значений времени задержки по меньшей мере одного из передачи и приема ультразвуковой волны; регулятор области перекрытия, выполненный с возможностью установления условий для генерирования изображения области перекрытия; и генератор интегрированного изображения, выполненный с возможностью генерирования первых данных изображения области, включающей в себя область перекрытия. Регулятор области перекрытия выполнен с возможностью установления условий формы поверхности, обозначаемых для вычислителя времени задержки при вычислении значений времени задержки либо в первом установочном положении зонда, либо во втором установочном положении зонда, как первой приобретенной формы, получаемой в первом установочном положении зонда, и второй приобретенной формы, получаемой во втором установочном положении зонда. Технический результат: обеспечение возможности линейного сканирования в широком диапазоне. 2 н. и 6 з.п. ф-лы, 36 ил.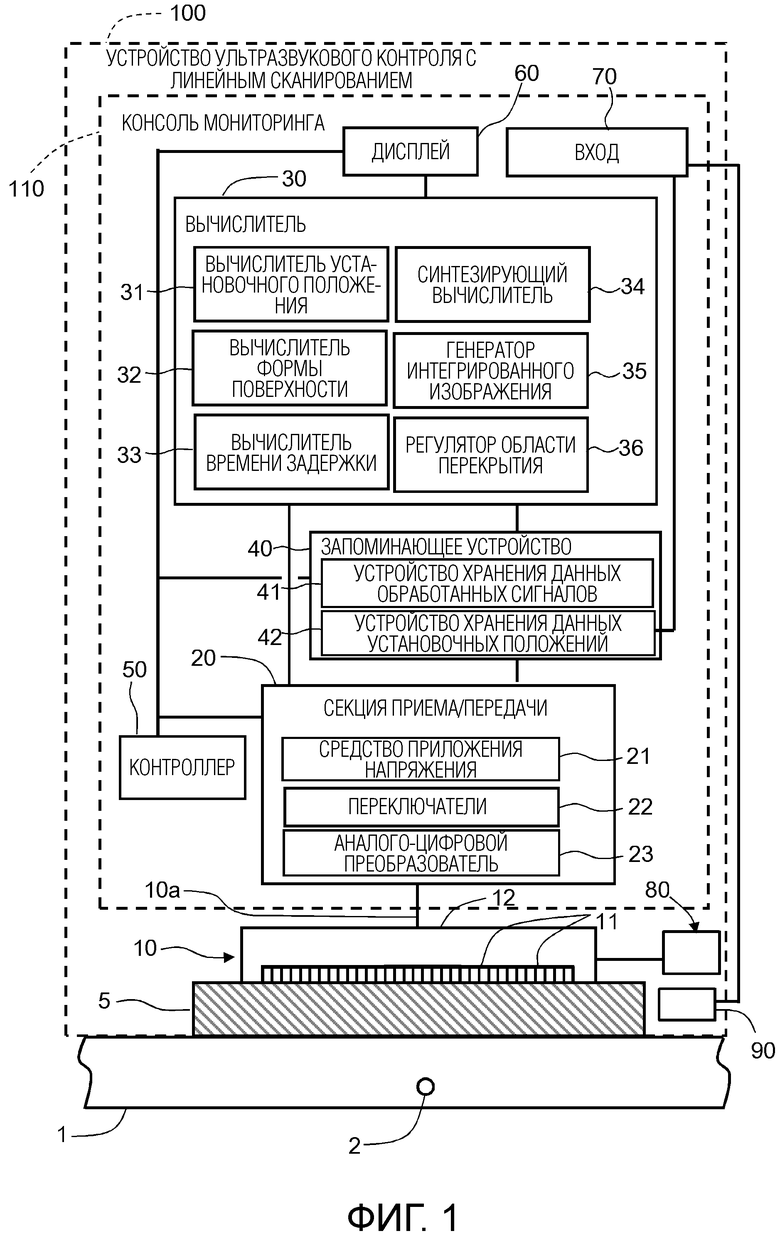
1. Устройство ультразвукового контроля с линейным сканированием, содержащее:
ультразвуковой решеточный зонд, имеющий множество ультразвуковых элементов, выровненных в первом направлении, причем каждый из ультразвуковых элементов выполнен с возможностью передачи ультразвуковой волны и приема ультразвуковой волны в контролируемый объект;
вычислитель времени задержки, выполненный с возможностью вычисления, относительно формы поверхности контролируемого объекта, значений времени задержки по меньшей мере одного из передачи и приема ультразвуковой волны каждым из ультразвуковых элементов;
регулятор области перекрытия, выполненный с возможностью установления условий для генерирования изображения области перекрытия между первым установочным положением зонда и вторым установочным положением зонда ультразвукового решеточного зонда, причем второе установочное положение зонда сдвинуто в первом направлении относительно первого установочного положения зонда; и
генератор интегрированного изображения, выполненный с возможностью генерирования первых данных изображения области, включающей в себя область перекрытия, причем первые данные изображения продолжаются в первом направлении и в направлении глубины контролируемого объекта,
причем регулятор области перекрытия выполнен с возможностью установления условий формы поверхности, обозначаемых для вычислителя времени задержки при вычислении значений времени задержки либо в первом установочном положении зонда, либо во втором установочном положении зонда, в качестве как первой приобретенной формы, получаемой в первом установочном положении зонда, так и второй приобретенной формы, получаемой во втором установочном положении зонда.
2. Устройство ультразвукового контроля с линейным сканированием по п. 1, в котором регулятор области перекрытия использует первую синтезированную форму волны, получаемую в первом установочном положении зонда, и вторую синтезированную форму волны, получаемую во втором установочном положении зонда.
3. Устройство ультразвукового контроля с линейным сканированием по п. 2, в котором второе установочное положение зонда установлено таким образом, что путь луча ультразвуковой волны, имеющего вторую синтезированную форму волны, перекрывает путь луча ультразвуковой волны, имеющего первую синтезированную форму волны.
4. Устройство ультразвукового контроля с линейным сканированием по любому из пп. 1-3, в котором регулятор области перекрытия получает первую приобретенную форму и вторую приобретенную форму на основе данных ультразвукового испытания, передаваемых от ультразвукового решеточного зонда.
5. Устройство ультразвукового контроля с линейным сканированием по любому из пп. 1-3, дополнительно содержащее блок приобретения форм, выполненный с возможностью приобретения первой приобретенной формы и второй приобретенной формы.
6. Устройство ультразвукового контроля с линейным сканированием по любому из пп. 1-3, дополнительно содержащее приводное устройство решеточного зонда для установления ультразвукового решеточного зонда в установочное положение зонда, при этом ультразвуковой решеточный зонд сканирует контролируемый объект, и для перемещения ультразвукового решеточного зонда между установочными положениями зонда.
7. Устройство ультразвукового контроля с линейным сканированием по любому из пп. 1-3, в котором
ультразвуковой решеточный зонд имеет множество ультразвуковых элементов, расположенных в первом направлении и во втором направлении, отличном от первого направления, образующих двумерную решетку; и
упомянутое устройство дополнительно содержит второй генератор изображения, выполненный с возможностью генерирования вторых данных изображения, продолжающихся в направлении, перпендикулярном первому направлению.
8. Способ ультразвукового контроля с линейным сканированием, содержащий:
этап приобретения первых контрольных данных, на котором запоминают в запоминающем устройстве первые контрольные данные, получаемые ультразвуковым решеточным зондом, имеющим множество ультразвуковых элементов, в первом установочном положении зонда на поверхности контролируемого объекта;
этап приобретения вторых контрольных данных, на котором запоминают в запоминающем устройстве вторые контрольные данные, получаемые ультразвуковым решеточным зондом во втором установочном положении зонда, включающем в себя область перекрытия, перекрывающую первое установочное положение зонда в первом направлении вдоль поверхности контролируемого объекта;
этап установления условий, на котором устанавливают, в регуляторе области перекрытия, условия генерирования данных изображения для области перекрытия; и
этап генерирования данных изображения, на котором генерируют, с использованием генератора интегрированного изображения, контрольные данные изображения, соответствующие первому установочному положению зонда и второму установочному положению зонда, включающему в себя область перекрытия, на основе первых ультразвуковых контрольных данных, вторых ультразвуковых контрольных данных и упомянутых условий, причем
этап генерирования данных изображения включает в себя этап вычисления времени задержки, на котором вычисляют, с использованием вычислителя времени задержки, значения времени задержки по меньшей мере одного из передачи ультразвуковой волны и приема ультразвуковой волны в контролируемом объекте каждым из ультразвуковых элементов, относительно формы поверхности контролируемого объекта; и
этап установления условий включает в себя этап, на котором устанавливают условия формы поверхности, обозначаемые для вычислителя времени задержки при вычислении значений времени задержки либо в первом установочном положении зонда, либо во втором установочном положении зонда, в качестве как первой приобретенной формы, получаемой в первом установочном положении зонда, так и второй приобретенной формы, получаемой во втором установочном положении зонда.
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ЛИТЫХ КОРПУСНЫХ ДЕТАЛЕЙ | 2015 |
|
RU2589456C1 |
| УЛЬТРАЗВУКОВОЙ ДАТЧИК С БОЛЬШИМ ПОЛЕМ ОБЗОРА И СПОСОБ ИЗГОТОВЛЕНИЯ ДАННОГО УЛЬТРАЗВУКОВОГО ДАТЧИКА | 2010 |
|
RU2533336C2 |
| SU 1300378 A1, 30.03.1987 | |||
| Система акустического изображения | 1989 |
|
SU1663533A1 |
| US 2016290973 A1, 06.10.2016 | |||
| US 2015080725 A1, 19.03.2015. | |||

