Изобретение относится к беспилотным летательным аппаратам (БЛА) аэродинамического типа и может быть использовано для посадки летательного аппарата и фиксации с дальнейшей его безопасной транспортировкой.
Известен сверхлегкий беспилотный летательный аппарат (см. RU 2293043 С1, 10.02.2007), обеспечивающий безопасность летательного аппарата, как в полете, так и при посадке. Для этого, согласно данному техническому решению, БЛА снабжается удлиненным в продольном направлении центральным связующим узлом, в задней части которого установлен управляемый импеллер, а в передней части расположен отсек для полезной нагрузки. Кроме того, крылья БЛА прикреплены к боковым поверхностям центрального связующего узла, ориентированы перпендикулярно продольной оси центрального связующего узла и лежат с ней в одной горизонтальной плоскости. Дополнительно в этом устройстве применяется посадочное приспособление, которое выполнено с возможностью поглощения кинетической энергии БЛА при его контакте с земной поверхностью. В частном случае реализации, посадочное приспособление состоит из первого и второго защитных обручей, которые идентичны по форме и размеру, расположены соответственно в горизонтальной и вертикальной плоскостях и жестко скреплены друг с другом в точках пересечения. Внешние концы крыльев БЛА закреплены на диаметрально противоположных сегментах первого защитного обруча. Верхняя и нижняя точки второго защитного обруча соединены с центральным связующим узлом штырями. Центральный связующий узел выполнен из углепластика или стеклопластика, крылья - из прочного синтетического материала, например лавсана, а обручи и штыри - из жесткого упругого материала, например углепластика.
Недостатками этого технического решения можно считать конструктивную сложность и повреждение силовой установки и полезной нагрузки летательного аппарат при его ударе о землю из-за потери упругости центрального связующего узла, связанной с возникновением трещин в стеклопластике и влиянием солнечных лучей на углепластик, используемых для изготовления центрального связующего узла.
Наиболее близким техническим решением к предлагаемому является принятая авторами за прототип посадочная площадка для посадки и автоматической фиксации беспилотного летательного аппарата (см. ПМ RU 197345 U1, 22.04.2020). Данное устройство содержит круглый стол, на краях которого диаметрально противоположно закреплены первая и вторая U-образные стойки, при этом поверхность стола совмещена с тензометрическим датчиком, U-образные стойки снабжены подвижными в радиальном направлении планками-фиксаторами, нижние поверхности которых выполнены в виде зубчатых реек, состоящих в зацеплении с шестернями, закрепленными на валах шаговых двигателей, закрепленных на внутренних поверхностях U-образных стоек. Выход тензометрического датчика подключен к измерительному входу блока управления, выполненного на основе микроконтроллера, размещенного в корпусе, который закреплен на боковой поверхности первой U-образной стойки. Четыре младших линии первого силового выхода блока управления подключены к первому шаговому двигателю, четыре старших линии первого силового выхода подключены ко второму шаговому двигателю, а второй силовой выход подключен к визуальному маяку, выполненному в виде кольцевой светодиодной ленты, закрепленной на столе. Дополнительно блок управления снабжен радиомодулем и GPS-трекером.
К недостаткам этого известного технического решения можно отнести конструктивную сложность и не надежную работу планков-фиксаторов из-за износа их зубчатых реек, шестерней и других трущихся деталей.
Техническим результатом предлагаемого приспособления является повышение надежности позиционирования и фиксации беспилотного летательного аппарата после его посадки с дальнейшей его безопасной транспортировки.
Технический результат достигается тем, что приспособление для посадки беспилотного летательного аппарата и его фиксации содержит круглый стол, шаговый двигатель, датчики, контроллер и фиксаторы, при этом на нижней поверхности круглого стола под углом 120° размещены первый, второй и третий фиксаторы по одной подвижной кареткой и пятью роликами, связанными тросиками с пружинами блока синхронного перемещения кареток фиксаторов, ходовой винт блока синхронного перемещения, снабженного дополнительно двумя датчиками в виде индуктивных типа, соединен с валом шагового двигателя, управляемого контроллером, подключенным по питанию к выходу блока импульсного постоянного напряжения, причем каждая из трех кареток имеет насадку грибкообразной формы для захвата обруча, закрепленного на ножках летательного аппарата под его двигателями, стол в местах контакта трех кареток с его поверхностью имеет прорезы, обеспечивающие выступы насадок над верхней поверхности стола, блок синхронного перемещения с индуктивными датчиками, подключенными к контроллеру и служащими для ограничения хода кареток фиксаторов, блок импульсного постоянного напряжения и шаговый двигатель с контроллером, расположены на нижней поверхности круглого стола, установленного на транспортном средстве для транспортировки летательного аппарата.
Сущность заявляемого изобретения, характеризуемого совокупностью указанных выше признаков, состоит в том, использование обруча, закрепленного на ножках летательного аппарата под его двигателями, и трех кареток, имеющих насадку грибкообразной формы для захвата обруча, дает возможность надежно зафиксировать летательный аппарат и произвести его безопасную транспортировку.
Наличие в заявляемом устройстве совокупности перечисленных существующих признаков, позволяет решить задачу безопасной транспортировки летательного аппарата благодаря закрепленному на его ножках под двигателями обручу и трем кареткам, имеющим насадку грибкообразной формы для захвата обруча с желаемым техническим результатом, т.е. повышением надежности позиционирования и фиксации беспилотного летательного аппарата после его посадки
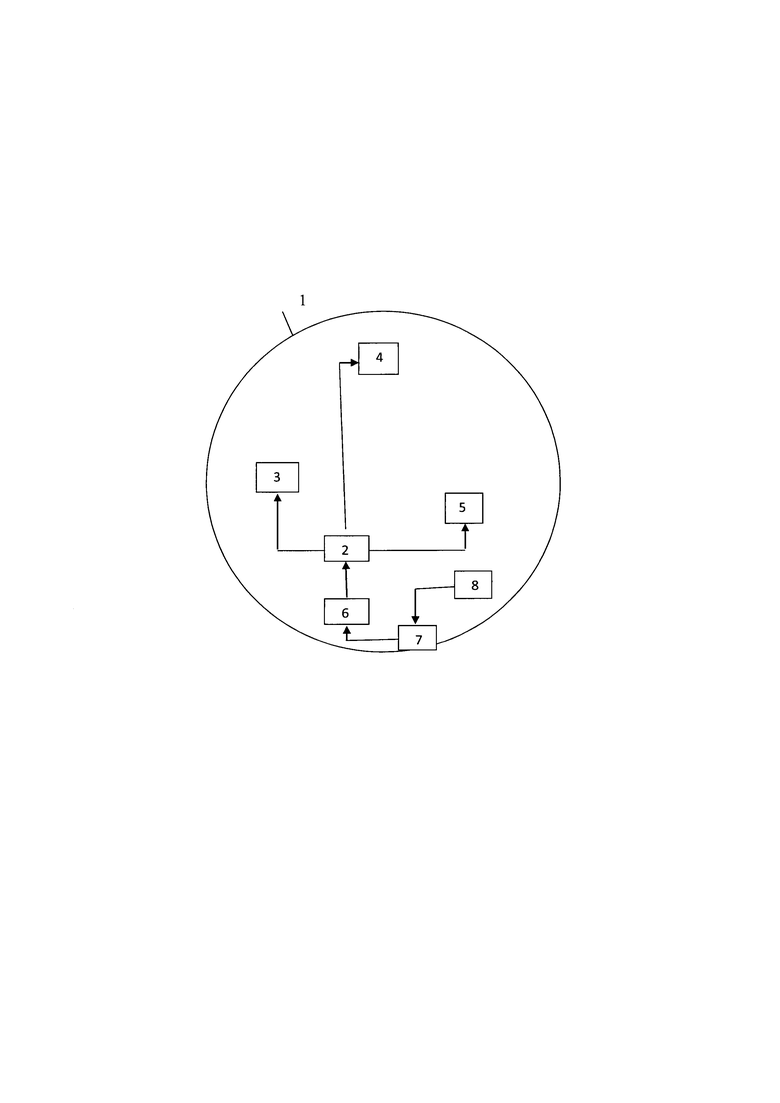
На чертеже приведена функциональная схема приспособления для посадки беспилотного летательного аппарата и его фиксации.
Приспособление для посадки беспилотного летательного аппарата и его фиксации содержит круглый стол 1, блок синхронного перемещения кареток 2, первый фиксатор 3, второй фиксатор 4, третий фиксатор 5, шаговый двигатель 6, контроллер 7 и блок питания 8.
Предлагаемое приспособление работает следующим образом. После плановой работы беспилотного летательного аппарата, с земли дается команда о его посадке на круглый стол 1, установленный на транспортном средстве для дальнейшей транспортировки летательного аппарата. При этом перед посадкой летательного аппарата, все каретки первого фиксатора 3, второго фиксатора 4 и третьего фиксатора 5 стянуты к центру стола. В рассматриваемом случае спуск данного летательного аппарата производится плавно (без кинетической энергии) по специальной программе, обеспечивающей безопасность в посадке. Вопросы, связанные с математическим обеспечением указанной программы, в рамках данного технического решения не рассматриваются.
Для безопасного базирования и правильной фиксации летательного аппарата, на его ножках под двигателями закрепляют обруч. Благодаря этому, каретки грибкообразной формы первого, второго и третьего фиксаторов надежно захватывают обруч с летательным аппаратом.
Так как предлагаемое приспособление в большей степени рассчитано на безопасную транспортировку по местности летательного аппарата, то в данном случае, важным вопросом является его надежная фиксация после захвата. Для этого выходным постоянным импульсным сигналом блока питания 8 через контроллер 7 запускают шаговый двигатель 6. Вращающий вал двигателя обеспечивает перемещение (схождение/расхождение) подвижной части с пружинами (ходовой винт) блока синхронного перемещения кареток 2. В силу того, что пружины указанной подвижной части с помощью тросиков механически связаны с пятью роликами первого, второго и третьего фиксаторов, все это в купе приводит в движение роликов этих фиксаторов. При этом благодаря двум индуктивным датчикам, предзначеным для определения начальных, или конечных положений обруча в насадках, обеспечивается ограничение максимального натяжение пружин и не допускается возможность их поломки или перекоса. Другими словами, в данном случае осуществляется их схождение/расхождение в зависимости от направления перемещения ходового винта блока синхронного перемещения кареток. В результате все этого, обруч с летательным аппаратом надежно фиксируется в трех каретках грибкообразной формы.
В данном приспособлении использование пружин дополнительно дает возможность оптимизировать усилие на обруч, препятствуя его перемещение и не допускать излишних растягивающих усилий, амортизируя знакопеременные нагрузки. Кроме того, тросики, связывающие пружины блока синхронного перемещения с роликами фиксаторов, ввиду их упругости и эластичности, обеспечивают равномерное натяжение на всех трех каретках фиксаторов. Здесь также следует отметить, при транспортировке летательного аппарата, возможно возникновение его тряски, приводящей к смешению ходового винта блока синхронного перемещения. Для демпфирования этого возмущающего фактора, шаговый двигатель дополнительно снабжен электромагнитной тормозной муфтой.
Таким образом, в предлагаемом техническом решении на базе обруча, закрепленного на ножках летательного аппарата под его двигателями, и трех кареток, имеющих насадку грибкообразной формы для захвата обруча, можно обеспечить повышение надежности позиционирования и фиксации беспилотного летательного аппарата после его посадки с дальнейшей его безопасной транспортировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАТАПУЛЬТА ДЛЯ ЗАПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2725013C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ ПОТОКОВ ПРИ ИСПОЛЬЗОВАНИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ МУЛЬТИРОТОРНОГО ТИПА | 2023 |
|
RU2812920C1 |
| СВЕРХЛЕГКИЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2293043C1 |
| СПОСОБ ПОСАДКИ СВЕРХЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2307047C1 |
| КАТАПУЛЬТА ДЛЯ ВЗЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2497725C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| АВТОМАТИЧЕСКИЙ МУЛЬТИРОТОРНЫЙ АППАРАТ ТРАНСПОРТЕР ДЛЯ ОПЕРАТИВНОЙ ДОСТАВКИ МЕДИКАМЕНТОВ, ПРОДОВОЛЬСТВИЯ И ДРУГОГО ГРУЗА ЧЕРЕЗ ОПАСНУЮ ДЛЯ ЧЕЛОВЕКА ЗОНУ | 2020 |
|
RU2736604C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
Приспособление для посадки беспилотного летательного аппарата и его фиксации содержит круглый стол, блок синхронного перемещения кареток, три фиксатора, шаговый двигатель, контроллер и блок питания, соединенные определенным образом. Обеспечивается повышение надежности позиционирования и фиксации беспилотного летательного аппарата после его посадки. 1 ил.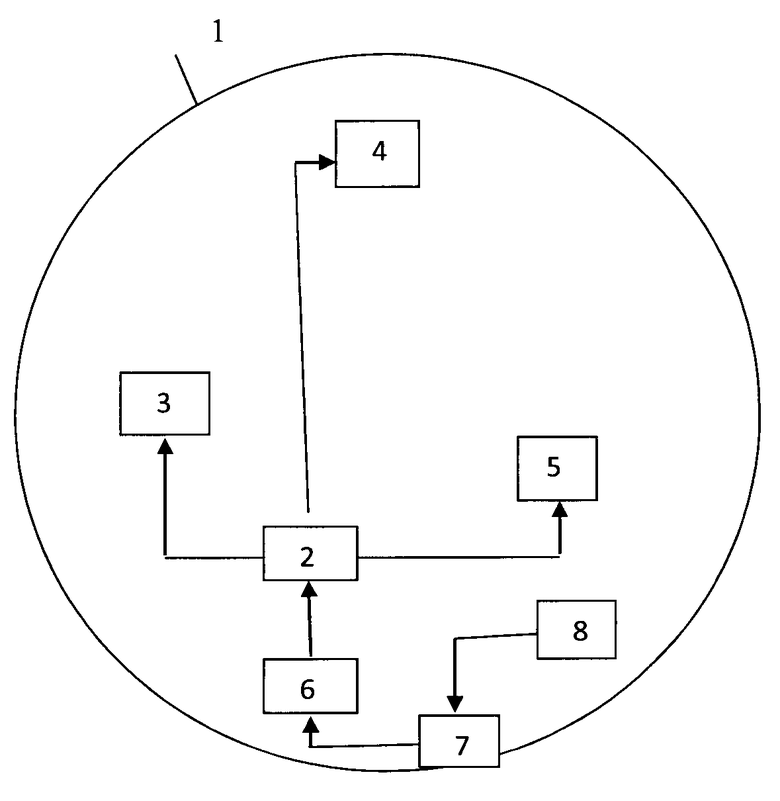
Приспособление для посадки беспилотного летательного аппарата и его фиксации, содержащее круглый стол, шаговый двигатель, датчики, контроллер и фиксаторы, отличающееся тем, что на нижней поверхности круглого стола под углом 120° размещены первый, второй и третий фиксаторы, каждый с одной подвижной кареткой и пятью роликами, связанными тросиками с пружинами блока синхронного перемещения кареток фиксаторов, а ходовой винт блока синхронного перемещения, снабженного дополнительно двумя датчиками в виде индукционного типа, и соединен с валом шагового двигателя, управляемого контроллером, подключенным по питанию к выходу блока импульсного постоянного напряжения, причем каждая из трех кареток имеет насадку грибкообразной формы для захвата обруча, закрепленного на ножках летательного аппарата под его двигателями, а стол в местах контакта трех кареток с его поверхностью имеет прорезы, обеспечивающие выступы насадок над верхней поверхности стола, блок синхронного перемещения с индуктивными датчиками, подключенными к контроллеру и служащими для ограничения хода кареток фиксаторов, при этом блок импульсного постоянного напряжения и шаговый двигатель с контроллером расположены на нижней поверхности круглого стола, установленного на транспортном средстве для транспортировки летательного аппарата.
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| МАШИНА ДЛЯ ВАЛКИ И ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU197345A1 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| CN 108945507 A, 07.12.2018 | |||
| WO 2006121662 A2, 16.11.2006. | |||
