Изобретение относится к системам посадки, средствам обслуживания и обеспечения беспилотных летательных аппаратов и предназначено для точного позиционирования беспилотного летательного аппарата на посадочной площадке и, при необходимости, его жесткой фиксации.
Из уровня техники известно позиционирующее устройство для беспилотного летательного аппарата (далее БЛА), входящее в состав базовой станции БЛА фирмы Copter Express (http://copterexpress.ru/), состоящее из множества толкателей, удерживаемых над посадочной поверхностью множеством линейных приводов; по меньшей мере, одного электромеханического соединителя, прикрепленного к одному из множества толкателей. Управление линейными исполнительными механизмами и толкателями, соединенными зубчатыми ремнями, осуществляется с помощью синхронизированных двигателей, вращающих зубчатые ремни. Каждая из связанных ременной передачей пар двигателей перемещает один горизонтально расположенный толкатель.
Основными недостатками данного позиционирующего устройства являются использование восьми синхронизированных двигателей с ременными передачами, использование зубчатых ремней и необходимость дополнительной установки направляющих для упоров, что создает крайне низкую надежность и высокую цену изделия, большой занимаемый устройством объем и вес, большую металлоемкость, что пагубно влияет на компас и систему навигации беспилотного летательного аппарата.
Из уровня техники известна базовая станция (патент №2670368, дата приоритета 01.02.2018, МПК B64F 1/12, B64C 27/08, правообладатель: Общество с ограниченной ответственностью «Адванс Аэро МАИ», RU) для беспилотного летательного аппарата, содержащая в том числе конические или пирамидальные направляющие, обеспечивающие ориентацию посадочных устройств БЛА, снабженные фиксаторами, выполненными, например, в виде выдвигающихся штырей, взаимодействующих с посадочными устройствами. Приводом фиксаторов может служить соленоид. Направляющие расположены таким образом, что основание конусов или пирамид лежат в одной плоскости с горизонтальной площадкой, а вершины направлены к основанию базовой станции. На завершающей стадии посадки посадочные опоры беспилотного летательного аппарата, взаимодействуя с конической или поверхностью пирамиды, точно ориентируют БЛА относительно базовой станции. Фиксаторы, расположенные в нижней части направляющих, удерживают БЛА на станции во время сильных порывов ветра.
Главным недостатком данных направляющих является их конструкция: четыре направляющих конусообразной или пирамидальной формы с фиксаторами. Необходима очень высокая точность посадки БЛА для попадания посадочных опор беспилотного летательного аппарата в направляющие базовой станции, совместимая с точностью позиционирования самим устройством. При неправильном позиционировании БЛА при посадке высока вероятность нарушения целостности посадочных опор. Таким образом, предложенная методика позиционирования не имеет смысла и практического применения.
Из уровня техники известно устройство для автоматического позиционирования беспилотного летательного аппарата на посадочной платформе (патент WO 2018042238, дата приоритета 19.05.2017, МПК B64F 1/00, B64F 1/12, B64F 1/22, правообладатель: «OSAÜHING ELI», ЕЕ), снабженного вибрационным устройством, генерирующим вибрацию на поверхность посадочной базы или ее части. Вибрирующая поверхность посадочной базы позиционирует БЛА в нужное место и положение относительно посадочной поверхности базы.
Главным недостатком данного устройства для автоматического позиционирования БЛА является использование для позиционирования дорогостоящего, редкого на сегодняшний день вибрационного механизма, имеющего достаточно большие сложности при калибровке относительно частоты и амплитуды вибрации, геометрии движения посадочной поверхности, а также относительно габаритов БЛА, приземляющихся на посадочной базе.
Так же из уровня техники известен бокс для беспилотного летательного аппарата (US 20180245365, приоритет от 17.08.2016, МПК E04H 6/44, H02J 7/00, B64C 39/02, правообладатель: «H3 Dynamics Holdings Pte. Ltd», SG), имеющий посадочный блок, включающий наклонные посадочные части: пластину для толкания беспилотного летательного аппарата, фиксированные наклонные стенки для направления БЛА и/или две подвижные наклонные стенки для контакта и направления БЛА в заранее определенную посадочную зону с минимальной погрешностью.
Главный недостаток данного изобретения заключается в использовании наклонных поверхностей для позиционирования БЛА в зону посадки, т.к. велика вероятность поломки посадочных опор и несущих винтов БЛА.
Из уровня техники известно бортовое устройство зарядки беспилотного летательного аппарата (патент ЕР 3340423 от 20.12.2017, МПК H02J 7/00, B64C 39/02, H02J 7/02, H02J 7/34, H02J 7/35, H02J 50/10. Правообладатель: BEIJING XIAOMI MOBILE SOFTWARE CO LTD (CN)), включающее в себя в том числе платформу, устанавливаемую на верхней части транспортного средства. В некоторых исполнениях платформа может состоять из нижней и боковых пластин и приводного механизма. В момент взлета и посадки БЛА боковые пластины опущены и образуют с нижней пластиной единую поверхность для взлета и посадки БЛА. После посадки беспилотного летательного аппарата на нижнюю платформу боковые пластины с помощью приводного механизма поднимаются вертикально, позиционируя БЛА на нижней платформе.
Недостатками данного устройства являются: узкий диапазон форм используемых беспилотных летательных аппаратов, вероятность опрокидывания БЛА при закрывании боковых пластин, использования минимум четырех приводов, что увеличивает стоимость и уменьшает надежность конечного устройства, возможность поломки шасси и несущих винтов БЛА после посадки.
В качестве прототипа было взято позиционирующее устройство, входящее в состав наземной станции беспилотных летательных аппаратов (патент WO 2018015960 от 21.07.2016, МПК B64C 39/02 (2006.01), G05D 1/00 (2006.01), G05D 1/10 (2006.01), H02J 7/00 (2006.01). Правообладатель: PERCEPTO ROBOTICS LTD [IL/IL]), имеющее посадочную поверхность, множество толкателей, удерживаемых над посадочной поверхностью, множеством линейных приводов; по меньшей мере, один электромеханческий соединитель, прикрепленный к одному из множества толкателей. Механически приспособленный для электрического соединения с совместимым электромеханическим соединителем беспилотного летательного аппарата. Множество толкателей включает в себя, по меньшей мере, два горизонтально расположенных толкающих стрежня, а множество линейных исполнительных механизмов включает в себя множество вертикальных стержней, прилепленных к концу одного из, по меньшей мере, двух горизонтально расположенных толкателей стержней. При этом электромеханический соединитель включает в себя зубчатый ремень, приспособленный для электромеханического соединения с толкателями.
Недостатками данного устройства являются:
1. Использование множества линейных приводов, толкателей и множества двигателей, что приводит к необходимости синхронизации работы и ненадежности конструкции при эксплуатации.
2. Использование зубчатых ремней - не надежно в плане использования, т.к. натяжение ремня зависит от условий внешней окружающей среды.
Задачей изобретения является создание устройства для позиционирования беспилотного летательного аппарата любого типа на самостоятельной или входящей в состав стартового контейнера или базовой станции посадочной площадке относительно ее габаритов, имеющего возможность контроля нахождения БЛА на посадочной площадке и, при необходимости, его зарядки.
Техническим результатом использования устройства позиционирования является установка БЛА в строго заданную точку посадочной площадки и его жесткая фиксация, а также при необходимости стыковка БЛА с зарядным устройством; и при необходимости, контроль присутствия БЛА на посадочной площадке.
Задача решается тем, что позиционируемое устройство, например, беспилотный летательный аппарат мультироторного типа, смещается при помощи подвижных упоров к точке позиционирования таким образом, чтобы позиционируемое устройство в конце движения оказалось в строго заданной точке, после чего позиционирующее устройство может вернуться в исходную позицию.
Сущность изобретения поясняется чертежами:
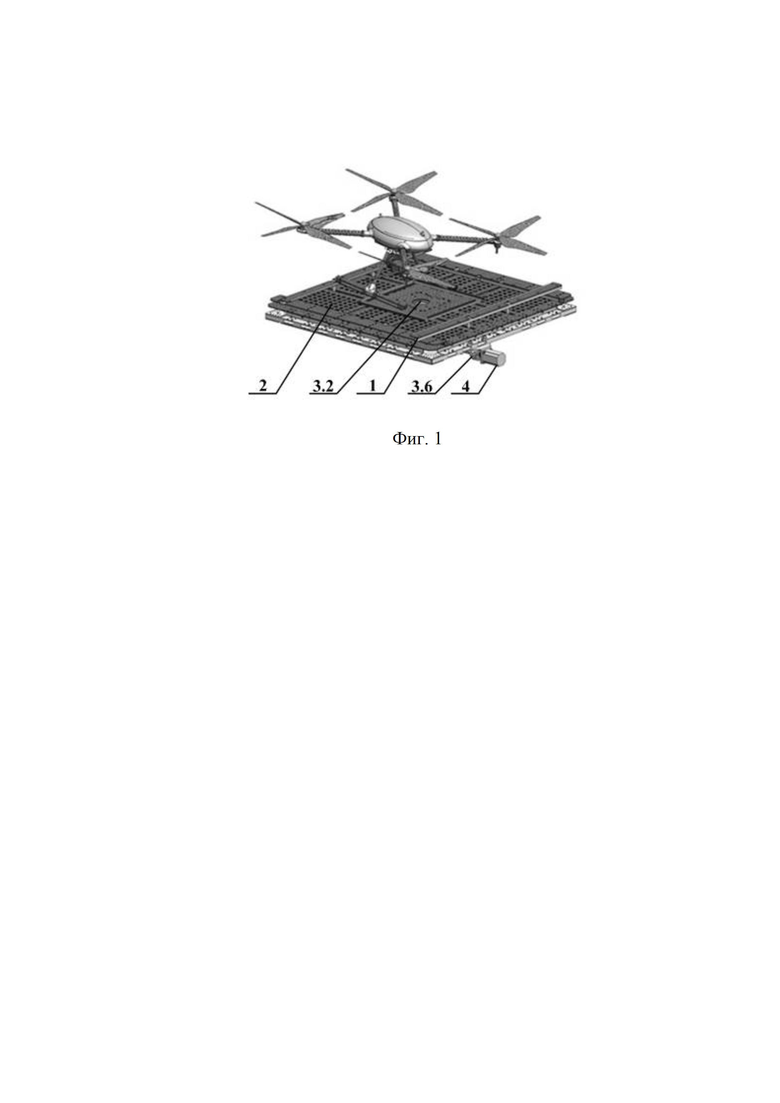
Фиг. 1 - вид сверху на посадочную платформу и элементы устройства автоматического позиционирования с заходящим на посадку БЛА.
Фиг. 2 - схематичное изображение элементов устройства автоматического позиционирования, вариант исполнения 1: а) вид сверху; б) вид снизу.
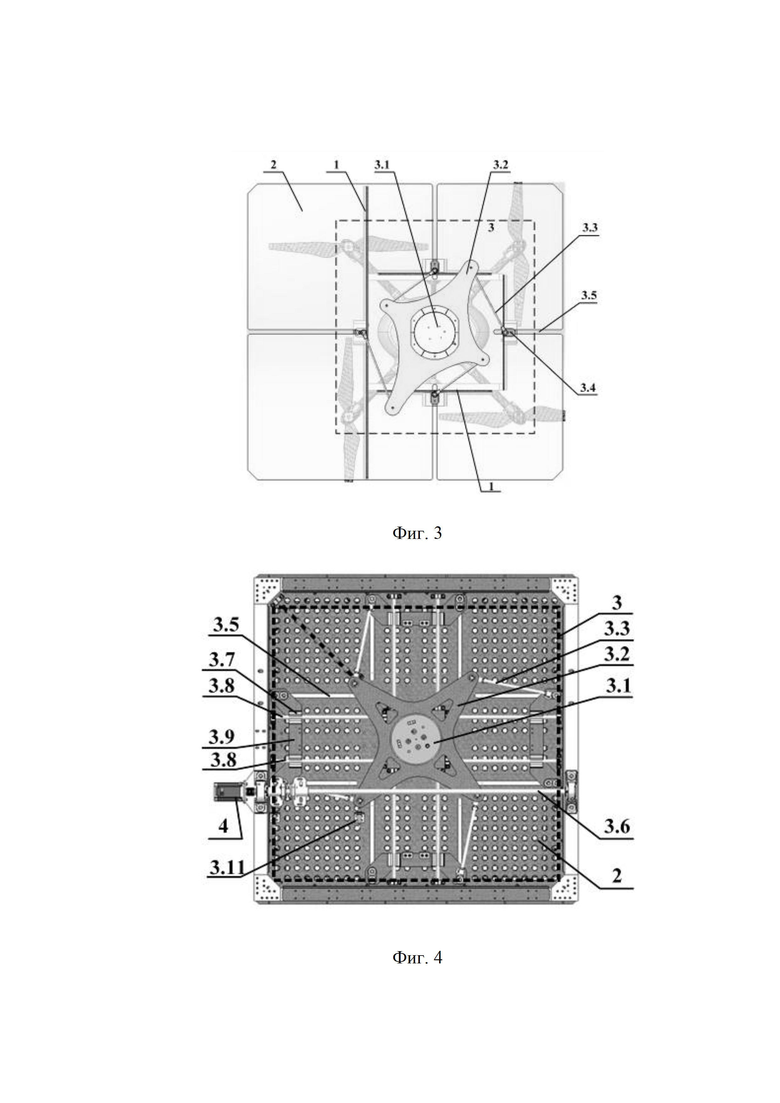
Фиг. 3 - схематичное изображение элементов устройства автоматического позиционирования, вариант исполнения 2.
Фиг. 4 - схематичное изображение элементов устройства автоматического позиционирования, вариант исполнения 3.
Фиг. 5 - схематичное изображение элементов устройства автоматического позиционирования, вариант исполнения 4 с использованием зубчатого зацепления.
Фиг. 6 - схематичное изображение элементов устройства автоматического позиционирования с установленными датчиками присутствия БЛА, зарядным контактом и ответным элемент на беспилотным летательным аппаратом.
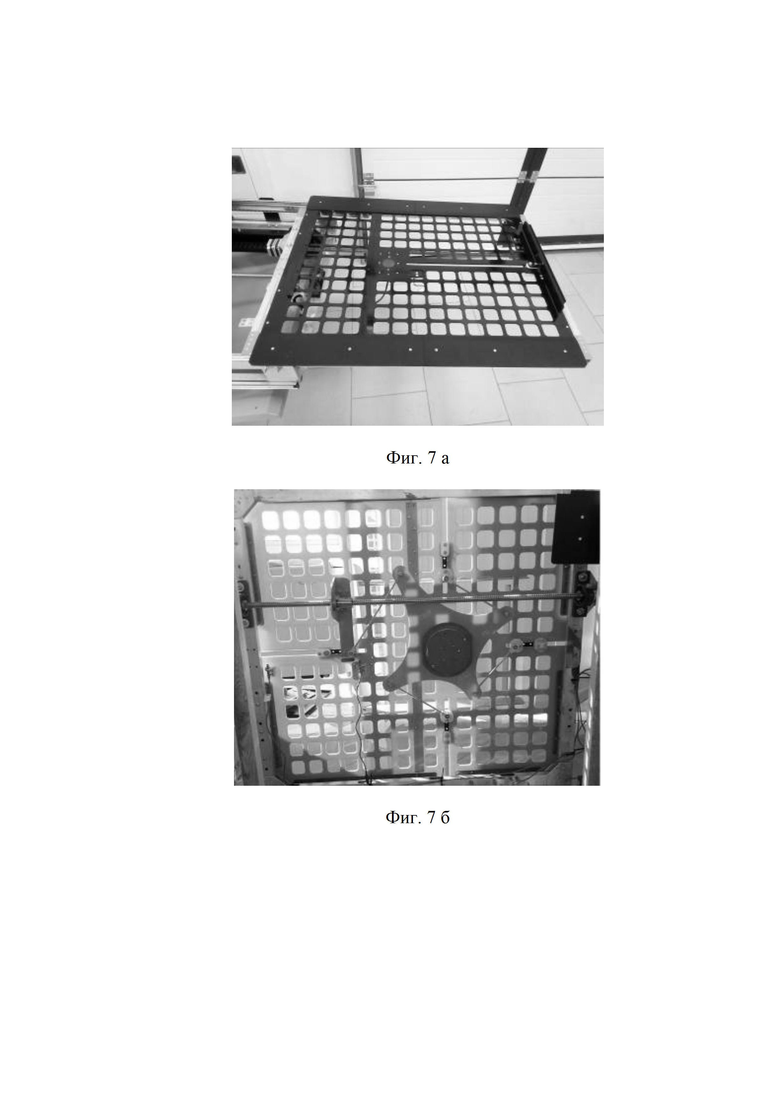
Фиг. 7 - фото действующего устройства автоматического позиционирования БЛА: (а) - реализованного по варианту исполнения 1; (б) - реализованного по варианту исполнения 2; (в) - реализованного по варианту исполнения 3.
На фигурах приняты следующие обозначения:
1 - упор;
2 - посадочная платформа;
3 - механизм управления упорами:
3.1 - опора диафрагмы; 3.2 - диафрагма; 3.3 - тяга; 3.4 - ползуны; 3.5 - канал движения; 3.6 - привод; 3.7 - подшипник; 3.8 - направляющие; 3.9 - соединительный элемент; 3.10 - датчик присутствия БЛА; 3.11 - датчик положения упора; 3.12 - зарядный контакт; 3.13 - ответный элемент БЛА.
4 - двигатель.
Обязательно, но не исключительно, изобретение состоит из, по меньшей мере, одного упора (1), передвигающегося по верхней части посадочной площадки (2), предназначенные для позиционирования БЛА на площадке (2); механизма (3) управления упорами (1) и двигателя (4), располагающимися в том числе, но не исключительно, под посадочной площадкой (2).
Опционально, но не исключительно, упоры могут быть выполнены в виде ступеней для обеспечения надежного перекоса беспилотного летательного аппарата с целью определения внутренними средствами БЛА погрешности посадки и автоматического ухода на второй круг для повторной посадки.
Данное расположение механизма (3) управления позволяет осуществить автоматизированное позиционирование БЛА на посадочной площадке (2) без увеличения площади самой площадки (2).
В зависимости от конструктива стартового контейнера, базовой станции либо посадочной площадки (2) механизм (3) управления упорами (1) может изготавливаться в различных исполнениях.
Опционально, но не исключительно, механизм (3) управления упорами (1) может состоять из опоры диафрагмы (3.1), жестко связанной любым способом с посадочной платформой (2); диафрагмы (3.2), механически подвижно крепящейся к опоре диафрагмы (3.1); по меньшей мере, одной тяги (3.3), одним концом крепящейся к диафрагме (3.2), а другим - к ползунам (3.4), крепящихся к упорам (1), и передвигающихся, по меньшей мере, по одному каналу движения (3.5).
Опционально, но не исключительно, механизм (3) управления упорами (1) может состоять из тяги (3.3), с одной стороны связанной с приводом (3.6), связанного с двигателем (4), а с другой - напрямую с упором (1).
Опционально, но не исключительно, для вращения диафрагмы (3.2) используется привод (3.6), различного типа действия: зубчатое зацепление; шарико-винтовая пара с гайкой, конструктивно связанной с одной из тяг; рычаг, связанный с одним концом диафрагмы; линейный актуатор; прямой привод от двигателя к диафрагме или любой другой. Привод (3.6) с одной стороны связан с двигателем (4), а другой - с тягой (3.3).
Опционально, но не исключительно, упоры (1) могут быть шарнирно закреплены на тягах (3.3) и перемещаться вдоль каналов (3.5) посадочной площадки (2) при помощи ползунов (3.4).
Опционально, но не исключительно, перемещение упоров (1) вдоль канала (3.5) и вращение диафрагмы (3.2) вокруг опоры (3.1) может быть обеспечено посредством, по меньшей мере, одного подшипника (3.7) или колеса, или каретки, или иного приспособления, установленного на, по меньшей мере, одной направляющей (3.8).
Опционально, но не исключительно, при использовании четного количества направляющих (3.8), подшипники (3.7) направляющих (3.8) могут быть соединены попарно, по меньшей мере, одним соединительным элементом (3.9), к которому крепится тяга (3.3), а с другой стороны - упор (1).
Опционально, но не исключительно, устройство позиционирования может быть оснащено, по меньшей мере, одним датчиком (3.10) присутствия БЛА (3.10), располагающимся в любом месте, предпочтительно, но не исключительно, в центральной зоне упора (1) или ином конструктивно удобном месте посадочной площадки, для определения успешного позиционирования БЛА; а также датчиками положения упора (3.11) для остановки двигателя (4) при достижении открытого или закрытого положения упоров (1). В качестве датчика (3.11) положения упора может применяться датчик с любым принципом работы, при использовании которого существует возможность определить открытое/закрытое положение упоров (1).
Конструктивно устройство позиционирования изготавливается таким образом, что ползун (3.4), подшипник (3.7) или другой элемент не может выпасть из канала, а диафрагма (3.2) и опора диафрагмы (3.1) имеют между собой достаточные для вращения диафрагмы (3.2) зазоры.
Опционально, но не исключительно, устройство позиционирования может быть оснащено по меньшей мере, одним зарядным контактом (3.12) для зарядки беспилотного летательного аппарата через ответный элемент (3.13), установленный на, по меньшей мере, одну посадочную опору БЛА. Зарядка может осуществляться через посадочные опоры БЛА, специальные зарядные кили в лучах беспилотного летательного аппарата; а ответная часть может располагаться на посадочной площадке (2), упорах (1) или отдельно вынесены; или иным способом.
Устройство позиционирования может работать как отдельное устройство, так и в составе стартового контейнера или базовой станции любой конфигурации.
Устройство работает следующим образом.
Вариант 1. После посадки беспилотного летательного аппарата на посадочную площадку (2) двигатель (4) приводит в действие привод (3.6) и, соответственно, по меньшей мере, одну тягу (3.3), связанную с упором (1). Упор (1) по каналу движения (3.5) перемещается к центру посадочной площадки (2), выравнивая расположение посадочных опор БЛА относительно площадки (2).
Вариант 2. После посадки беспилотного летательного аппарата на посадочную площадку (2) двигатель (4) приводит в действие привод (3.6) и, соответственно, по меньшей мере, одну тягу (3.3), связанную с диафрагмой (3.2). При вращении диафрагмы (3.2) от воздействия на нее перемещающейся тяги (3.3), вокруг опоры (3.1) связанные с ней тяги (3.3) толкают шарнирно закрепленные на них ползуны (3.4) с упорами (1) вдоль канала (3.5). Упоры (1) по каналу движения (3.5) перемещаются к центру посадочной площадки (2), выравнивая расположение посадочных опор БЛА относительно площадки (2).
Вариант 3. Отличается от варианта 2 тем, что при вращении диафрагмы (3.2) вокруг опоры (3.1) связанные с ней тяги (3.3) приводят в движение подшипники (3.7) или соединительный элемент (3.9) подшипников (3.7) с закрепленными на них упорами (1).
Вариант 4. Отличается от варианта 2 и варианта 3 тем, что в качестве привода (3.6) может использоваться зубчатое зацепление, напрямую связанное с диафрагмой (3.2); или линейный актуатор; или прямой привод от двигателя (4) к диафрагме (3.2) или любой другой.
Вариант 5. Отличается от вариантов 2-4 тем, что двигатель (4) при достижении открытого/закрытого положения упоров (1) останавливается по сигналу от датчика (3.11) положения упора.
Вариант 6. Отличается от вариантов 2-5 тем, что после позиционирования БЛА упорами (1) в конечные точки срабатывают датчики (3.10) присутствия БЛА, по срабатыванию которых отправляется команда на дальнейшие действия системы. В случае, если датчик (3.10) или один из датчиков (3.10) присутствия БЛА не срабатывает, дальнейшие механические движения элементов посадочной площадки (2) или стартового контейнера, или базовой станции не происходит, и на пульт оператора подается соответствующий информирующий сигнал.
Вариант 7. Отличается от вариантов 2-6 тем, что устройство позиционирования может быть оснащено, по меньшей мере, одним зарядным контактом (3.12). После посадки беспилотного летательного аппарата на посадочную площадку (2) устройство позиционирования, выполненное согласно вариантам исполнения, позиционирует БЛА на посадочной площадке (2) таким образом, что зарядный контакт (3.12) соединяется с ответным элементом (3.13), установленным на посадочной опоре БЛА.
Техническим результатом данного изобретения является возможность позиционирования беспилотного летательного аппарата любого типа на самостоятельной или входящей в состав стартового контейнера или базовой станции посадочной платформе относительно ее габаритов, жесткая фиксация БЛА, возможность контроля нахождения БЛА на посадочной платформе и, при необходимости стыковка беспилотного летательного аппарата с зарядным устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2670368C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Станция для беспилотных летательных аппаратов | 2023 |
|
RU2819277C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДОЧНУЮ ПЛАТФОРМУ | 2019 |
|
RU2722521C1 |



Устройство для автоматического позиционирования беспилотного летательного аппарата на посадочной площадке содержит посадочную платформу, упоры, передвигающиеся по верхней части посадочной платформы, механизм управления упорами, двигатель. Механизм управления упорами содержит опору диафрагмы, жестко связанную любым способом с посадочной платформой; диафрагму, механически подвижно крепящуюся к опоре диафрагмы; по меньшей мере одну тягу, одним концом крепящуюся к диафрагме, другим – к ползунам, крепящимся к упорам, канал движения тяги, привод двигателя. Обеспечивается повышение точности позиционирования, контроль нахождения беспилотного летательного аппарата на платформе, возможность его зарядки. 5 з.п. ф-лы, 7 ил.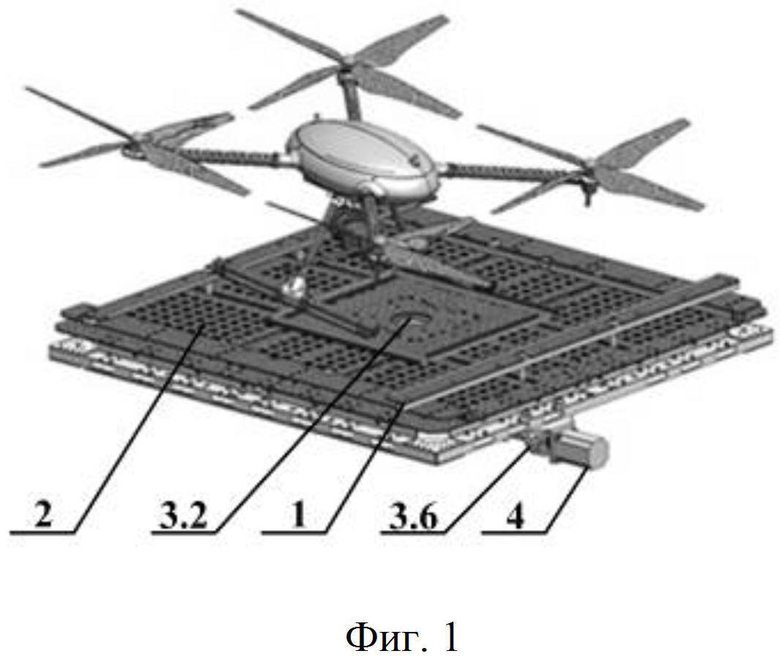
1. Устройство для автоматического позиционирования беспилотного летательного аппарата на посадочной площадке, состоящее из посадочной платформы, по меньшей мере одного упора, передвигающегося по верхней части посадочной платформы, механизма управления упорами и двигателя, отличающееся тем, что механизм управления упорами может состоять из: опоры диафрагмы, жестко связанной любым способом с посадочной платформой; диафрагмы, механически подвижно крепящейся к опоре диафрагмы; по меньшей мере одной тяги, одним концом крепящейся к диафрагме, другим – к ползунам, крепящимся к упорам; по меньшей мере одного канала движения тяги; а также привода двигателя.
2. Устройство по п.1, отличающееся тем, что перемещение упоров вдоль канала и вращение диафрагмы вокруг опоры может быть обеспечено посредством по меньшей мере одного подшипника, или колеса, или каретки, или иного приспособления, установленного на по меньшей мере одной направляющей.
3. Устройство по п.1, отличающееся тем, что при использовании четного количества направляющих подшипники направляющих могут быть соединены попарно по меньшей мере одним соединительным элементом, соединенным с тягой и упором.
4. Устройство по п.1, отличающееся тем, что механизм управления упорами может содержать в том числе по меньшей мере один датчик присутствия БЛА.
5. Устройство по п.1, отличающееся тем, что механизм управления упорами может содержать в том числе по меньшей мере один датчик положения упора для остановки двигателя при достижении открытого или закрытого положения упора.
6. Устройство по п.1, отличающееся тем, что может быть оснащено по меньшей мере одним зарядным контактом (3.12) для зарядки беспилотного летательного аппарата через посадочные опоры БЛА, специальные зарядные кили в лучах беспилотного летательного аппарата и ответную часть, расположенную на посадочной платформе, упорах или отдельно вынесенную.
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2278060C1 |
| ПОЛУАВТОМАТ ДЛЯ НАБОРКИ СТОПОРОВ СТАЛЕРАЗЛИВОЧНЫХ КОВШЕЙ | 0 |
|
SU185019A1 |
| US 20150175276 A1, 25.06.2015 | |||
| WO 2018042238 A1, 08.03.2018 | |||
| WO 2012064891 A2, 18.05.2012. | |||

