Изобретение относится к конструкции посадочной платформы для БПЛА вертикального взлета и посадки, которая обеспечивает прием, зарядку, хранение и обслуживание многовинтовых беспилотных летательных аппаратов (БПЛА) и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора.
Зарядка или замена аккумулятора, разгрузка и погрузка грузов, и обслуживание БПЛА в автоматическом режиме требуют точного позиционирования и ориентации БПЛА на посадочной площадке. Неопределенность позиционирования возникает вследствие неточности работы системы управления в процессе посадки, а также под влиянием погодных факторов, таких как порывистый ветер, туман, снег, дождь, которые как правило ухудшают процесс наведения или вводят неточности в последний момент посадки БПЛА, когда система управления уже не в состоянии провести корректировку местоположения приземляющегося аппарата с необходимой точностью.
Известны автоматические посадочные платформы БПЛА вертикального взлета и посадки, в которых после приземления БПЛА на посадочную площадку производится корректировка его местоположения каким-либо активным устройством (манипулятором), а затем закрепление его на посадочной площадке.
Посадочная платформа согласно заявке US 2014/0124621 А1, содержит посадочную площадку, четыре выравнивающие планки, механизм движения планок и устройство фиксации БПЛА. После приземления БПЛА механизм движения планок перемещает четырьмя планками БПЛА в зону позиционирования, в которой осуществляется фиксация БПЛА, зарядка или замена аккумулятора, или другой вид обслуживания.
Станция автономной замены батареи для беспилотного летательного аппарата US 2014/0319272 А1 содержит посадочную площадку, две выравнивающие планки, устройство закрепления БПЛА и механизм движения планок. Данное устройство перемещает БПЛА на край посадочной площадки, где установлено устройство замены аккумуляторов и закрепляет БПЛА.
Система центрирования для позиционирования беспилотного автономного транспортного средства WO 2017221235 А1 содержит пару смещаемых позиционирующих элементов с «W» образными кромками, которые при взаимодействии с опорами БПЛА позиционируют его.
Платформа автоматической зарядки для беспилотного летательного аппарата CN 106542109 А содержит посадочную площадку, зажимное устройство с W-образной пластиной и электрические контакты. После приземления БПЛА на посадочную площадку зарядная станция позиционирует БПЛА перемещением зажимных устройств, подключает к зарядному электроду и производит зарядку аккумулятора БПЛА.
Недостатком указанных устройств является большой интервал времени между приземлением БПЛА и закреплением его на посадочной площадке. Закрепление производится, как правило другим устройством, чем устройство позиционирования и работать они могут только последовательно.
Прототипом изобретения является установленная на транспортном средстве посадочная стационарная платформа беспилотного винтокрылого летательного аппарата CN 106904288 В, содержащая посадочную площадку и устройство позиционирования и фиксации БПЛА на посадочной площадке в виде двух пар прижимных планок, которые попадают в кольцевые углубления, расположенные на опорах БПЛА, и фиксируют его после позиционирования. Учитывая, что планки попадают в кольцевые углубления уже при позиционировании, данное устройство производит частичное удержание БПЛА уже во время позиционирования.
Недостатком прототипа является большой интервал времени между приземлением БПЛА и закреплением его на посадочной площадке. Этот недостаток не позволяет производить приземление, позиционирование и закрепление БПЛА в сложных условиях приземления (сильный и порывистый ветер, тряска посадочной платформы и т.п.). Находящийся на посадочной площадке БПЛА ведет себя как инертное тело и может производить под воздействием вибрации и ветра бесконтрольные движения. Для исключения этого недостатка необходимо немедленное закрепление БПЛА сразу после приземления.
Техническим результатом изобретения является создание быстродействующей посадочной платформы для БПЛА, пригодной для установки на стационарных и подвижных объектах, которая обеспечивает точное позиционирование и надежную фиксацию БПЛА различных конфигураций.
Технический результат обеспечивает посадочная платформа для БПЛА вертикального взлета и посадки, содержащая посадочную площадку, устройство позиционирования и фиксации БПЛА на посадочной площадке, где в соответствии с предложенным решением посадочная площадка выполнена в виде рамки, а устройство позиционирования и фиксации содержит выступающие над посадочной площадкой неподвижные и подвижные толкатели.
Также технический результат обеспечивает посадочная платформа для БПЛА вертикального взлета и посадки, содержащая посадочную площадку, устройство позиционирования и фиксации БПЛА на посадочной площадке, где в соответствии с предложенным решением посадочная площадка выполнена в виде рамки, а устройство позиционирования и фиксации содержит выступающие над посадочной площадкой подвижные толкатели.
Посадочная площадка может быть выполнена в виде рамки с наружным контуром в виде круга, или в виде выпуклого многоугольника, или рамки из сопряженных друг с другом отрезков и дуг.
Посадочная площадка выполнена в виде рамки, при этом наружный и внутренние контуры рамки могут быть эквидистантны.
Подвижные толкатели могут перемещаться вдоль наружного контура рамки посадочной площадки.
Подвижные толкатели могут перемещаться вдоль внутреннего контура рамки посадочной площадки.
Подвижные и неподвижные толкатели могут быть выполнены в виде вертикальных стоек.
Подвижные и неподвижные толкатели могут быть выполнены в виде ложементов, охватывающих лучи принимаемого БПЛА.
Подвижные и неподвижные толкатели могут быть выполнены в виде направляющих роликов, охватывающих лучи принимаемого БПЛА.
Посадочная платформа для БПЛА вертикального взлета и посадки содержит не менее шести неподвижных и подвижных толкателей.
Количество неподвижных толкателей не превышает количества подвижных толкателей.
Посадочная платформа для БПЛА вертикального взлета и посадки содержит не менее шести подвижных толкателей.
Общее количество толкателей не превышает двукратного количества лучей принимаемого БПЛА с наибольшим количеством лучей.
Привод перемещения подвижных толкателей содержит соединенный с приводом вращения не менее одного поворотного кольца, на каждом из которых установлены перемещаемые совместно в одном направлении подвижные толкатели.
Привод перемещения пары подвижных толкателей выполнен в виде двух зубчатых реек, которые входят в зацепление с общей шестерней, соединенной с двигателем.
Привод перемещения работающих синхронно групп пар подвижных толкателей выполнен в виде двух зубчатых реек, которые входят в зацепление с общей шестерней, соединенной с двигателем.
Каждый подвижный толкатель имеет индивидуальный привод перемещения.
По крайней мере часть подвижных толкателей и неподвижных толкателей содержат электрические контакты.
Посадочная платформа для БПЛА вертикального взлета и посадки содержит датчик для определения положения БПЛА и угла расположения лучей БПЛА относительно посадочной площадки в процессе и после приземления БПЛА на посадочную площадку.
Сущность изобретения поясняется следующим графическим материалом.
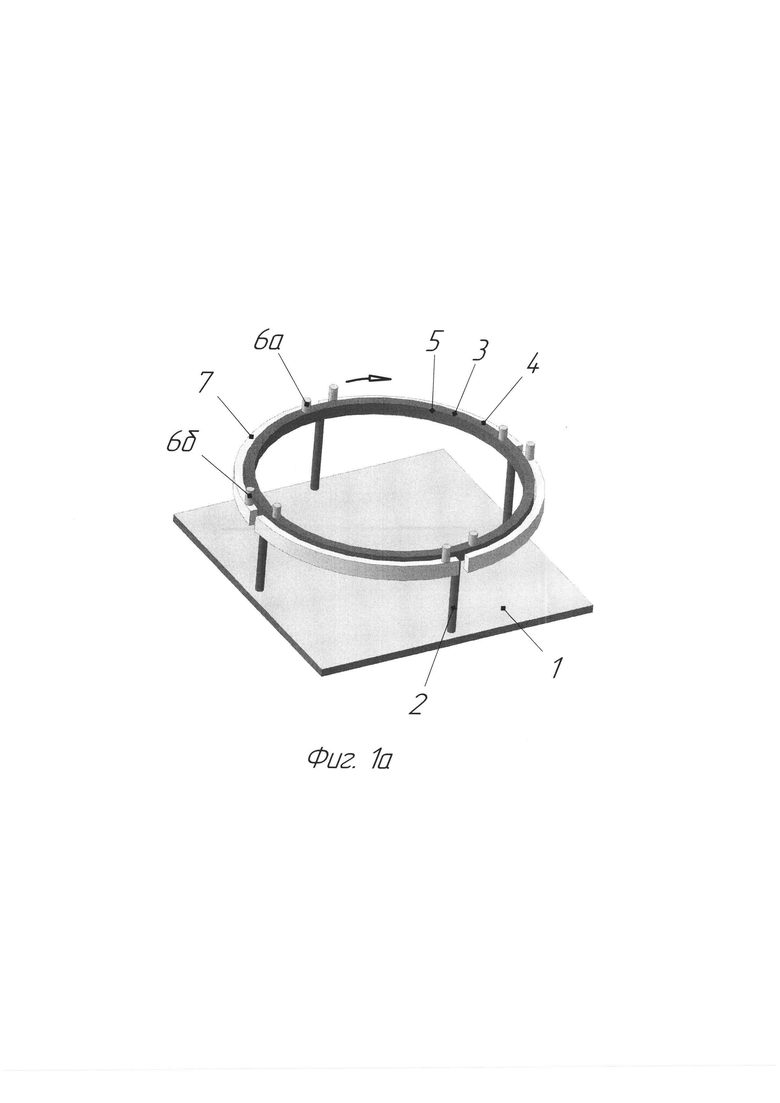
На фиг. 1а изображен вариант исполнения посадочной платформы с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющей собой круг.
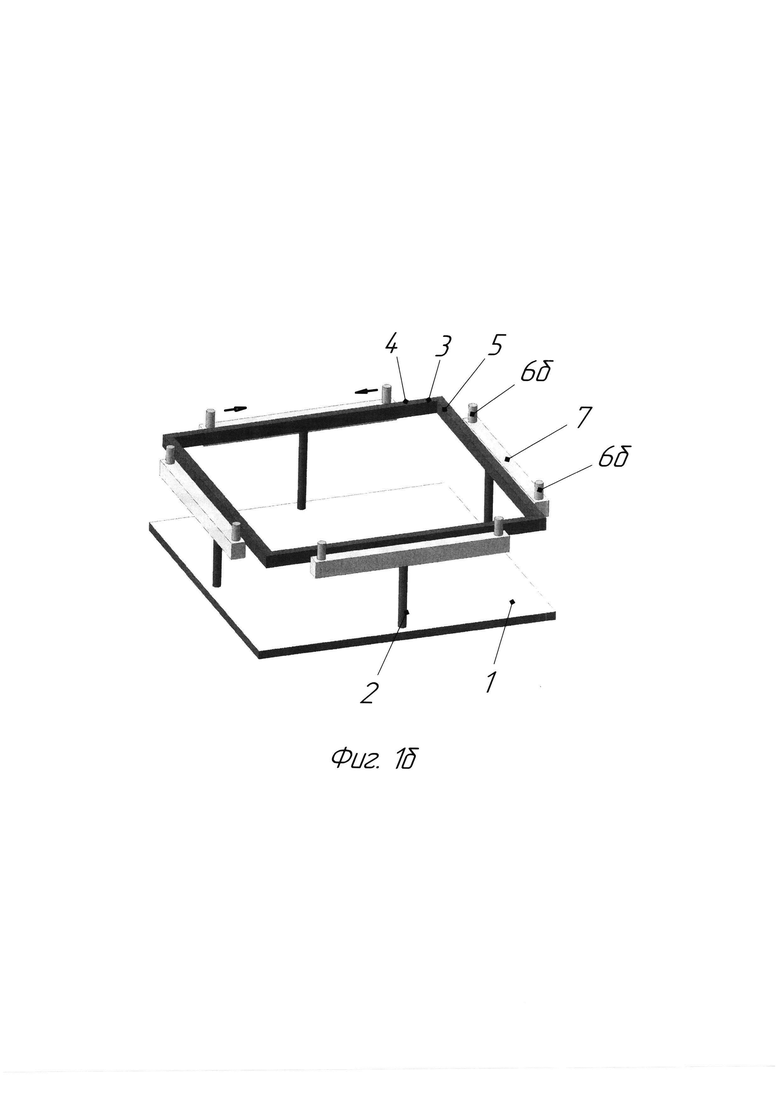
На фиг. 1б изображен вариант исполнения посадочной платформы с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющей собой многоугольник (квадрат).
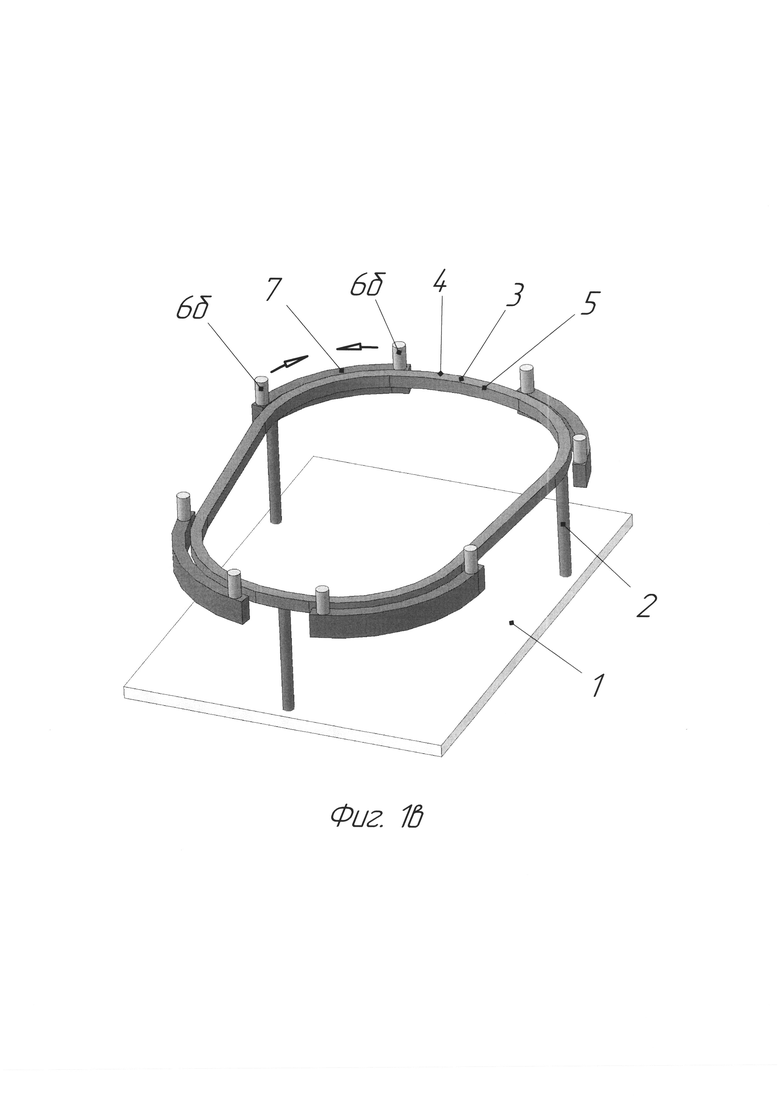
На фиг. 1в изображен вариант исполнения посадочной платформы с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, которая состоит из сопряженных (соединенных) между собой прямых отрезков и дуг.
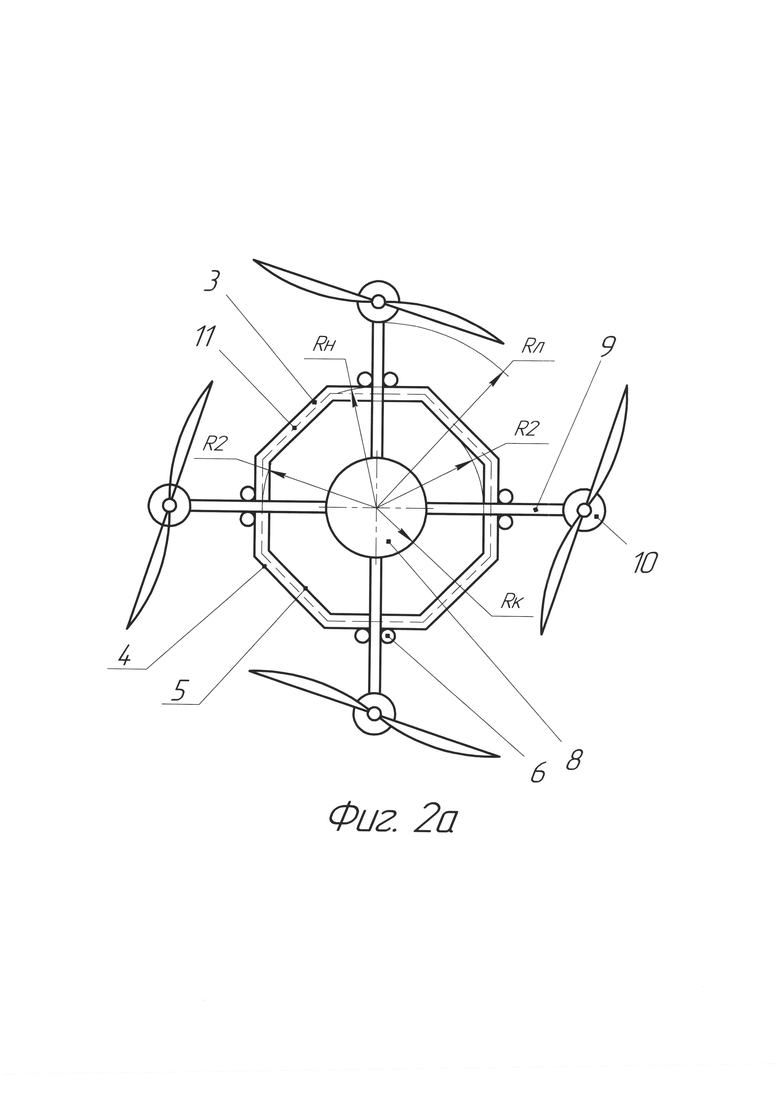
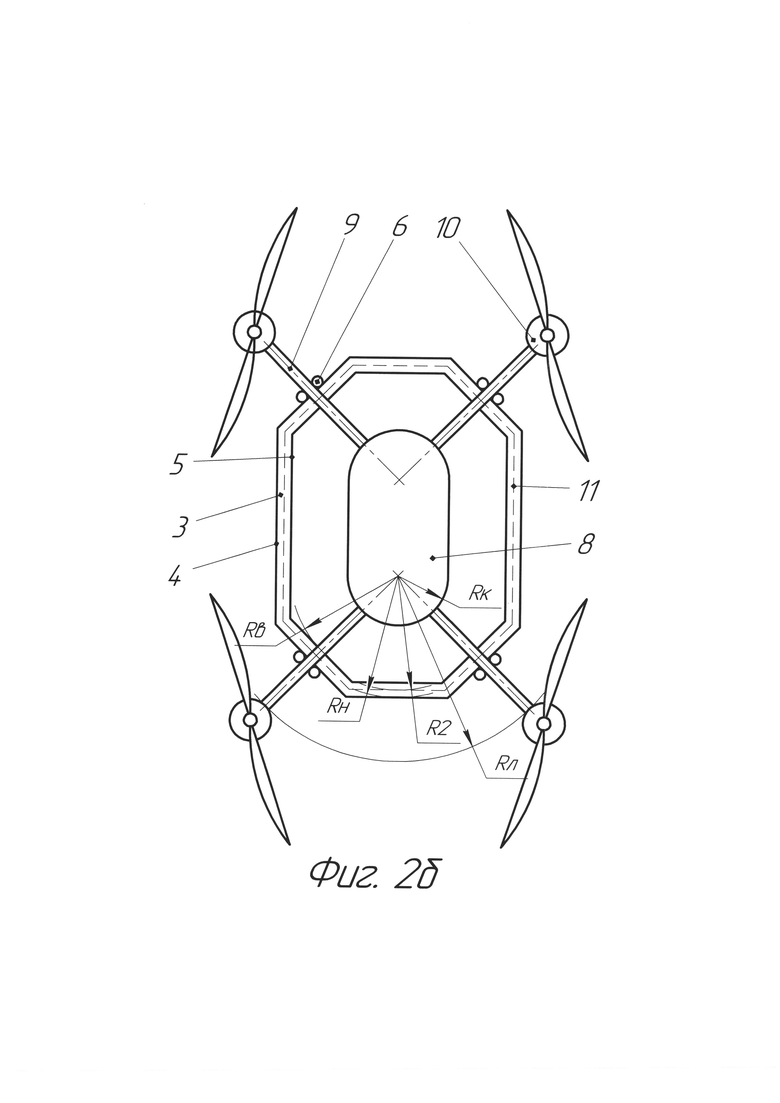
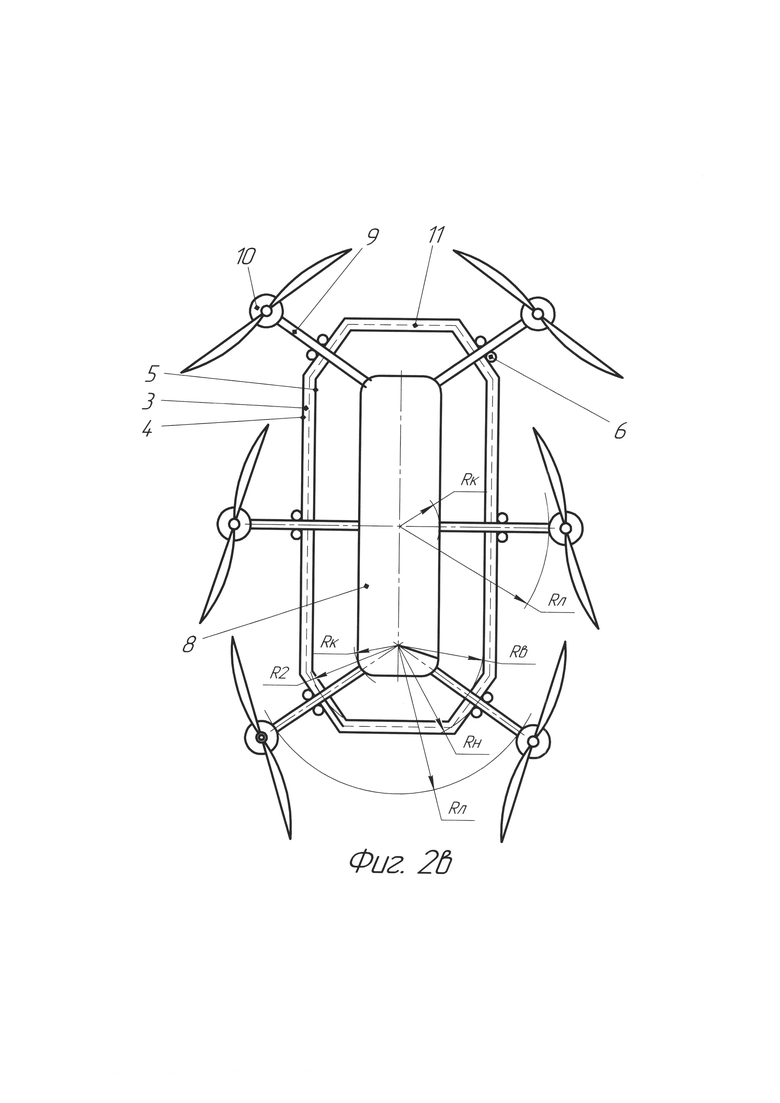
На фиг. 2а, 2б, 2в изображены варианты исполнения посадочных площадок (вид сверху), выполненные в виде рамки с выпуклым наружным контуром, представляющей собой многоугольник (восьмигранник) с позиционированным БПЛА.
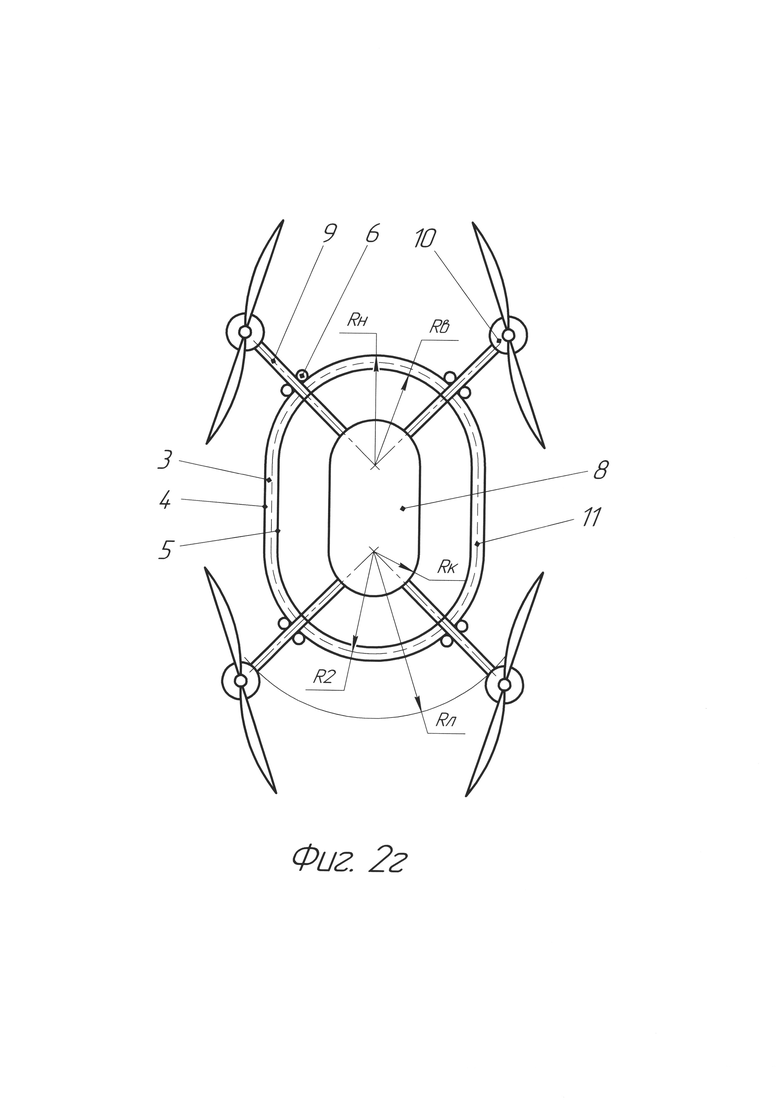
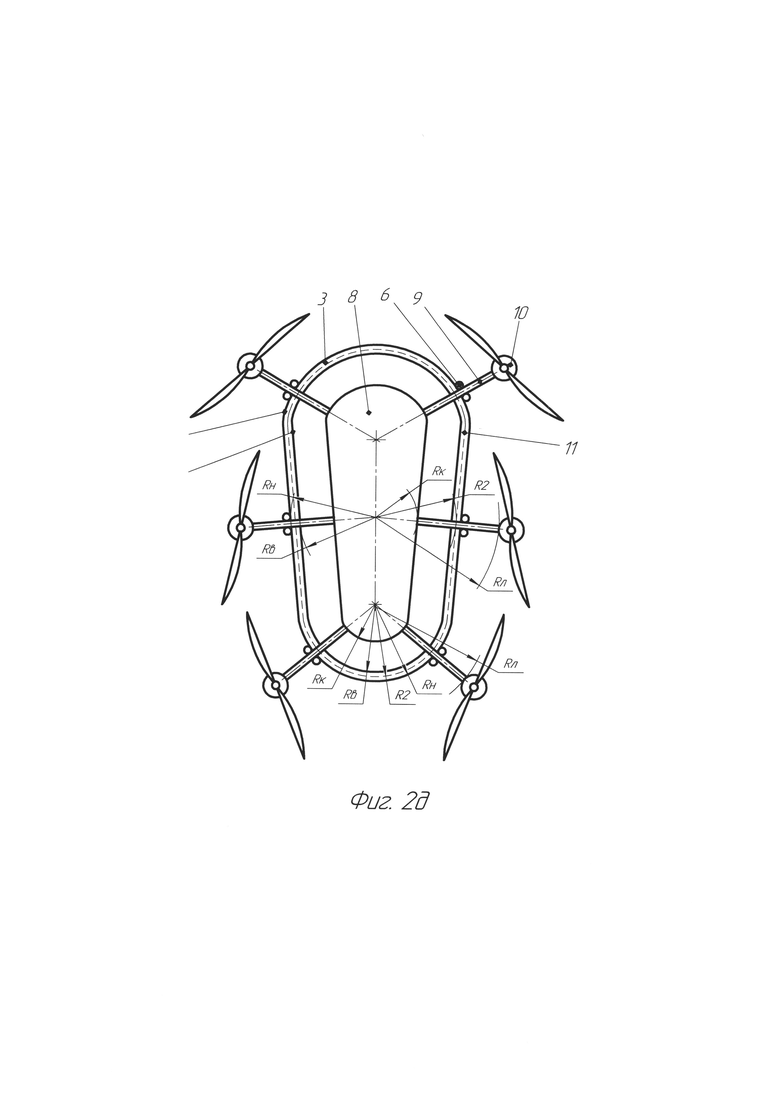
На фиг. 2г, 2д изображены варианты исполнения посадочных площадок (вид сверху), выполненных в виде рамки с выпуклым наружным контуром, которая состоит из сопряженных (соединенных) между собой прямых отрезков и дуг, с позиционированным БПЛА.
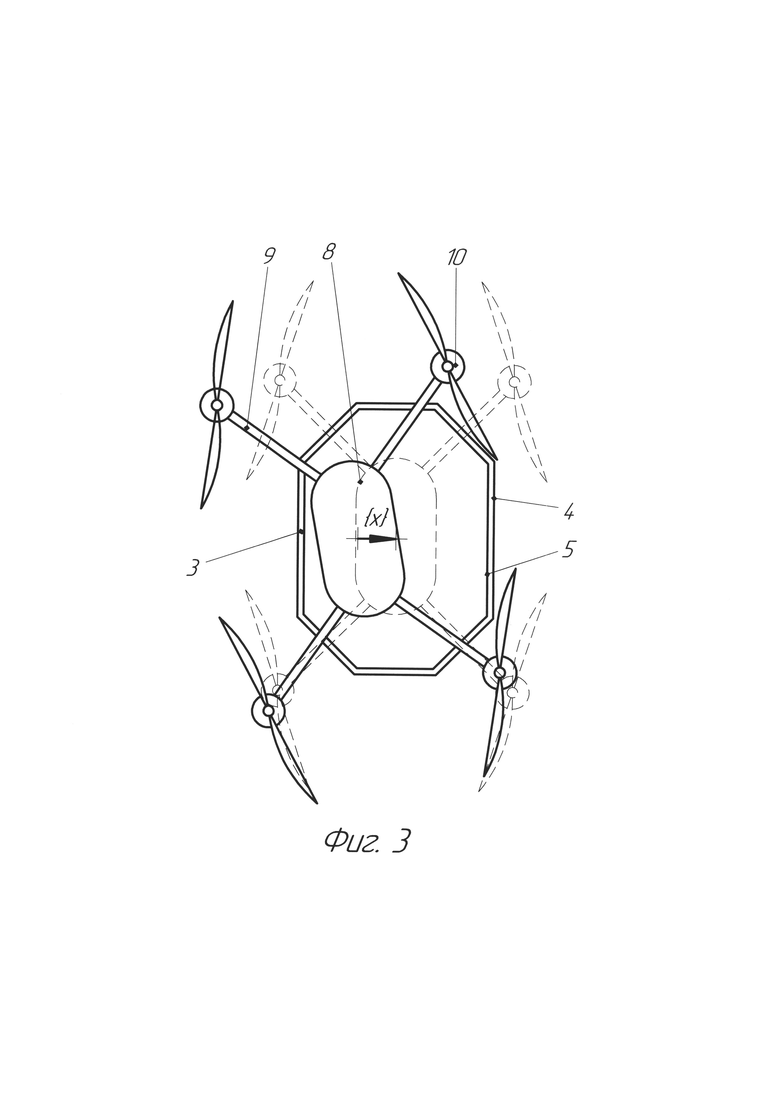
На фиг. 3 изображен промежуточный этап приземления БПЛА на посадочную площадку.
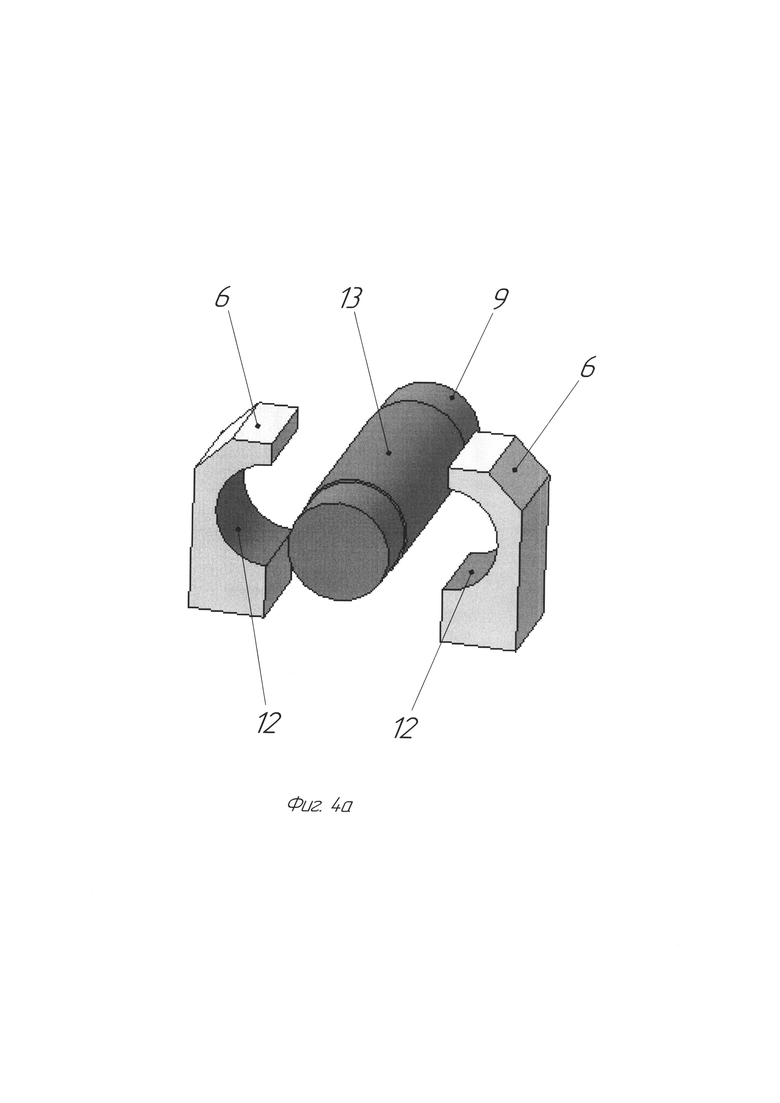
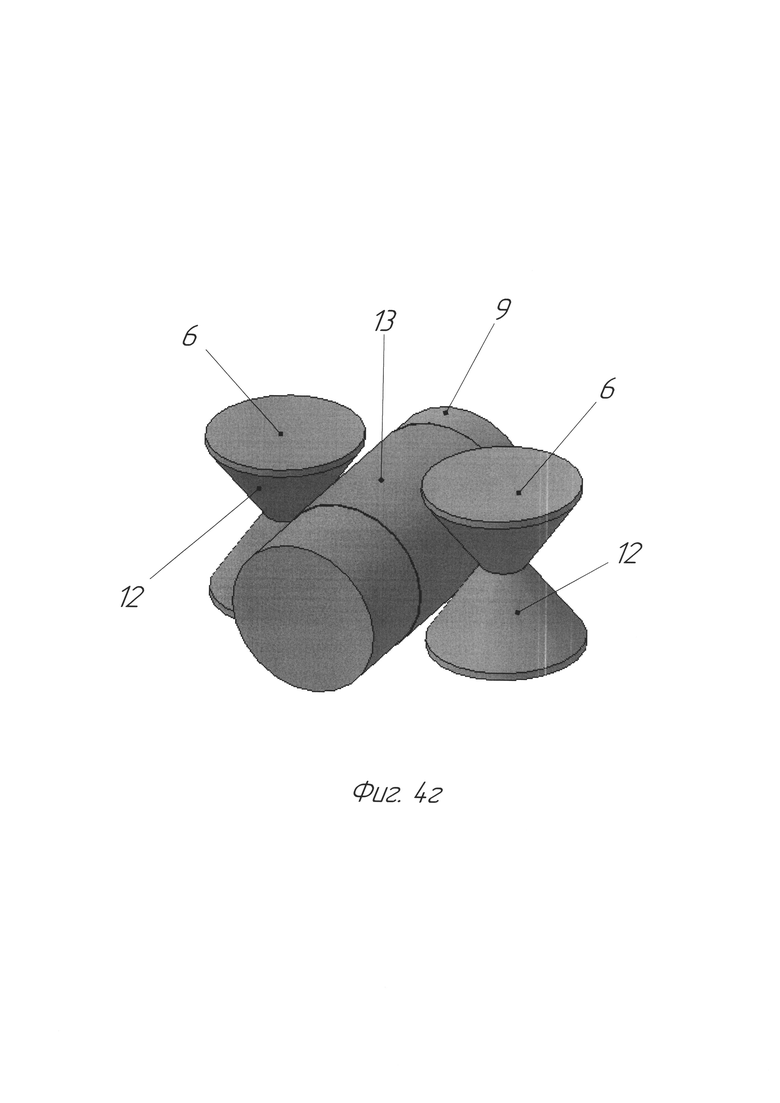
На фиг. 4а изображен вариант исполнения толкателей, выполненных в виде ложементов по форме луча БПЛА и фрагмент луча.
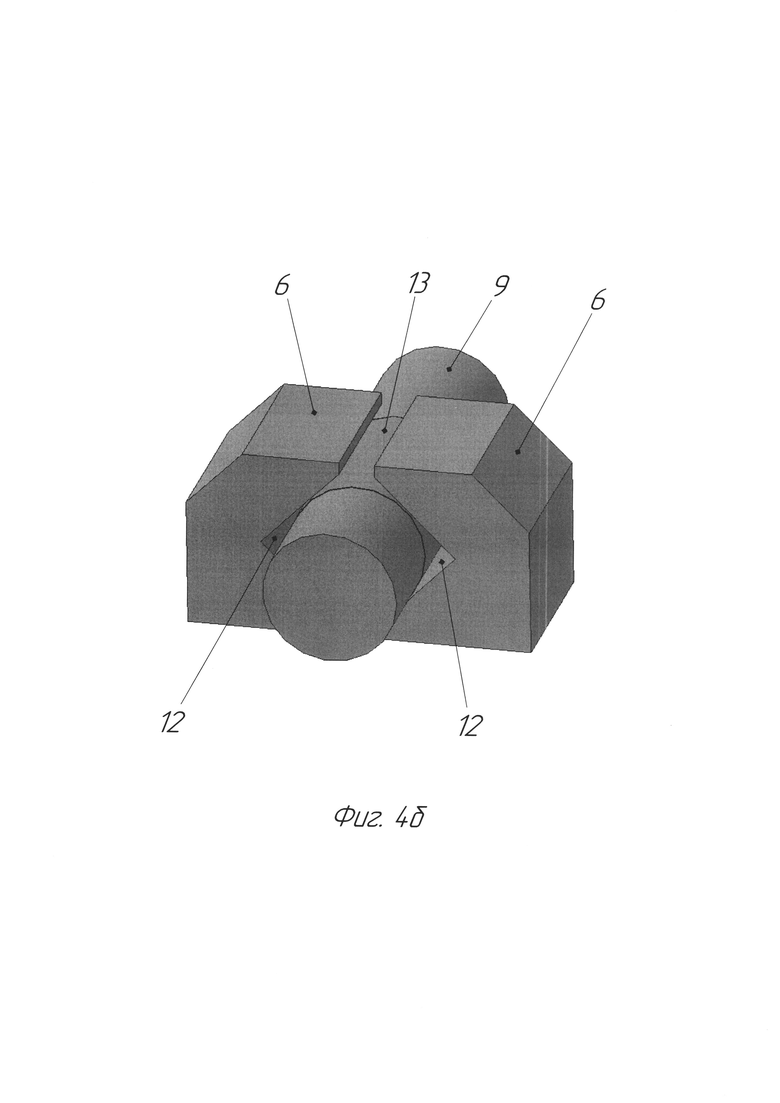
На фиг. 4б изображен вариант исполнения толкателей, выполненных в виде ложементов V-образной формы и фрагмент луча.
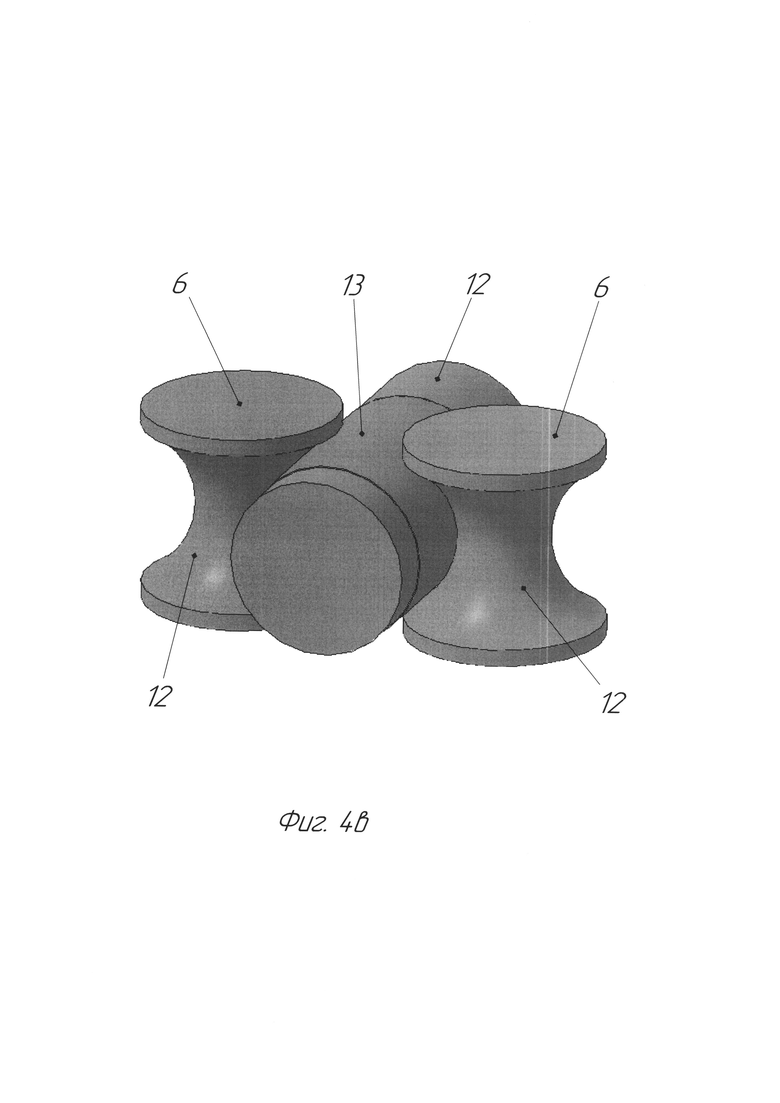
На фиг. 4в, 4 г изображены варианты исполнения толкателей, выполненных в виде направляющих роликов и фрагмент луча БПЛА.
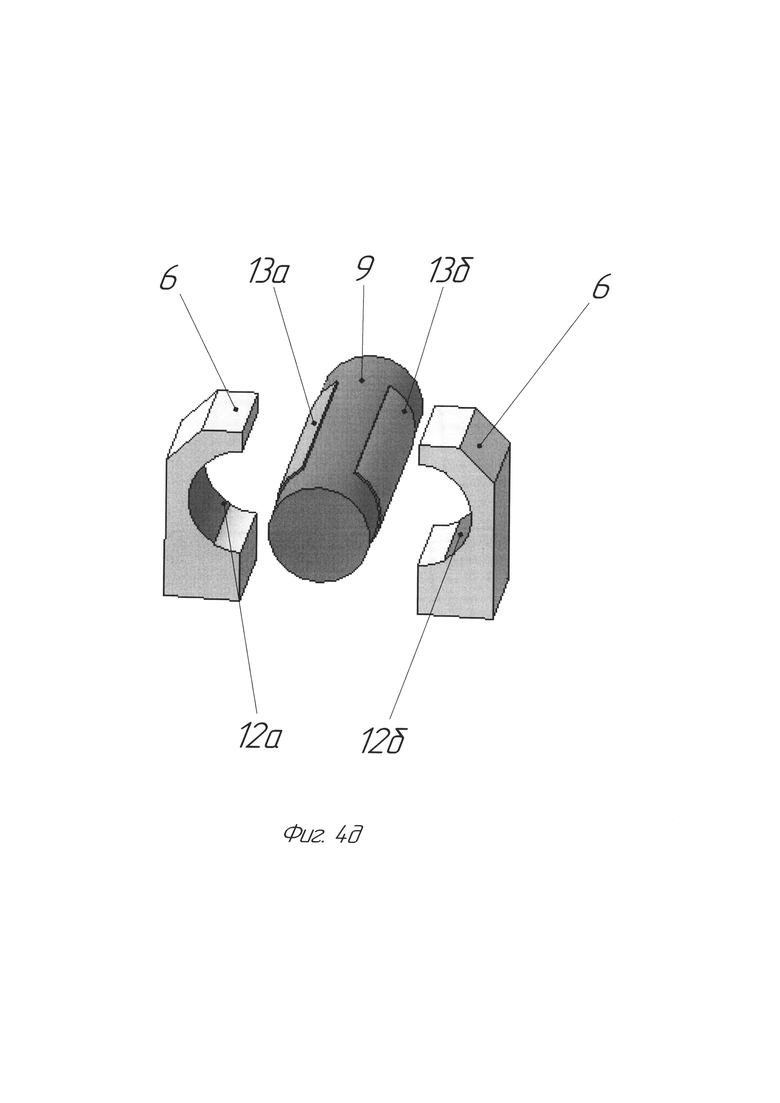
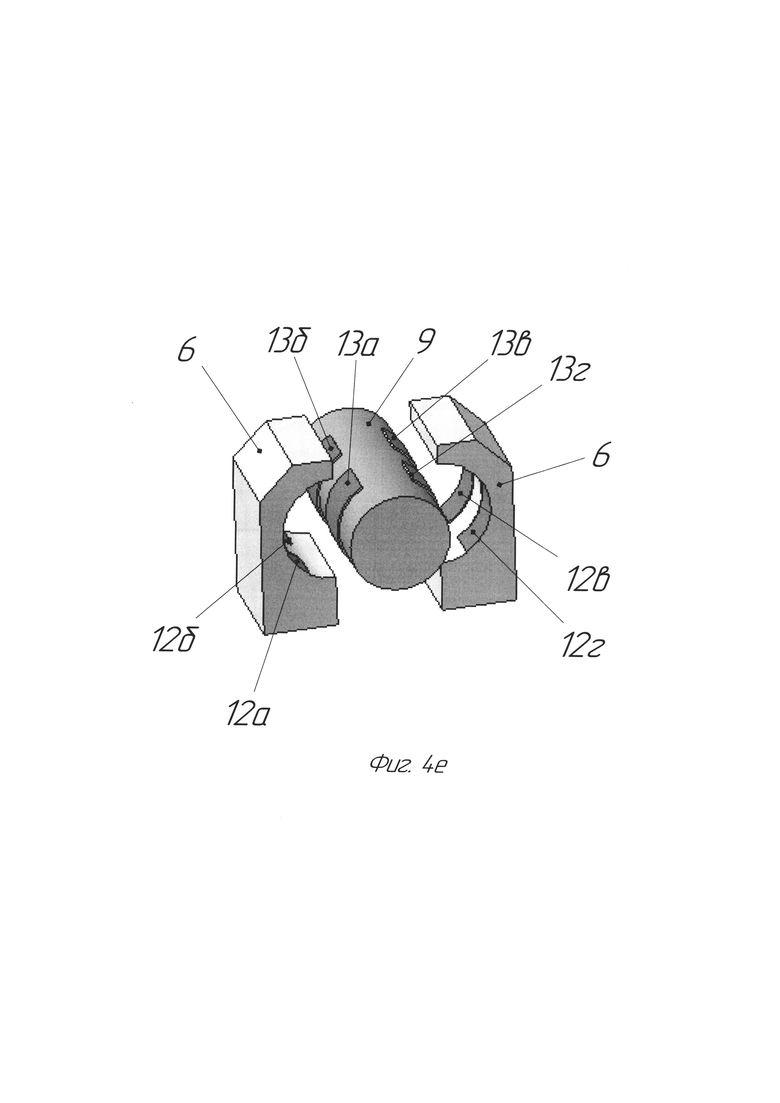
На фиг. 4д, 4е изображены варианты исполнения толкателей с электрическими контактами и варианты исполнения ответных электрических контактов на лучах БПЛА.
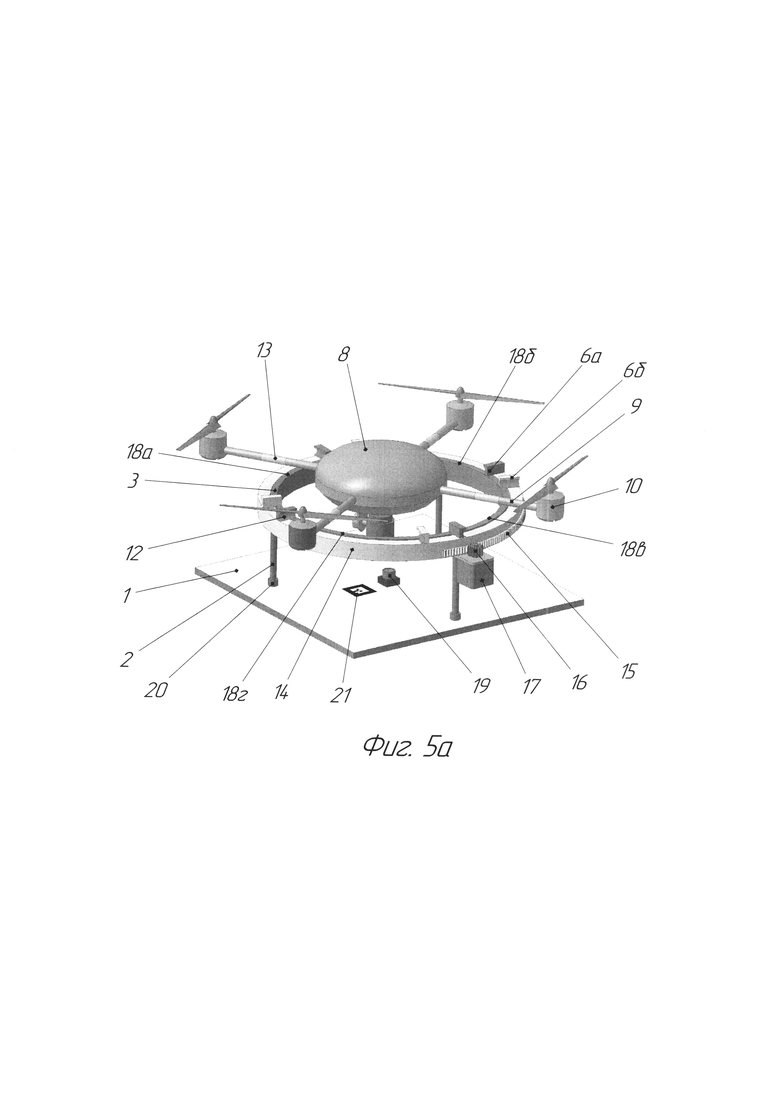
На фиг. 5а изображен вариант исполнения посадочной платформы с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющей собой круг, с приземлившимся БПЛА.
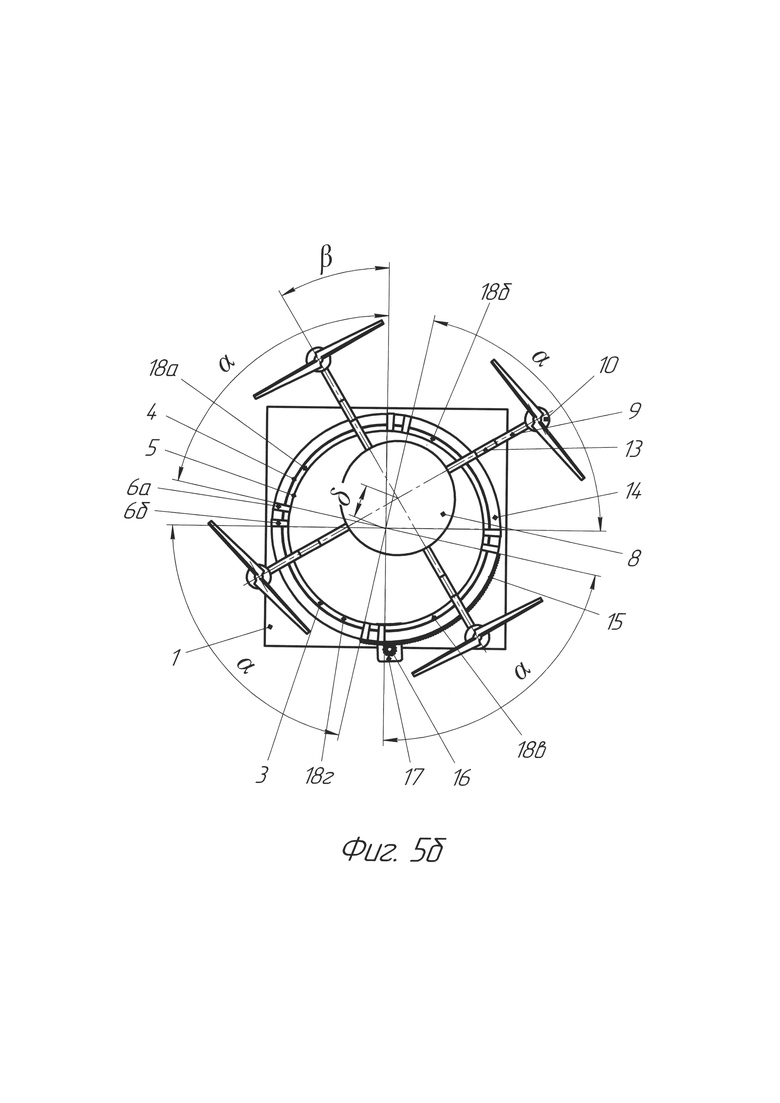
На фиг. 5б изображена посадочная платформа по фиг. 5а, вид сверху.
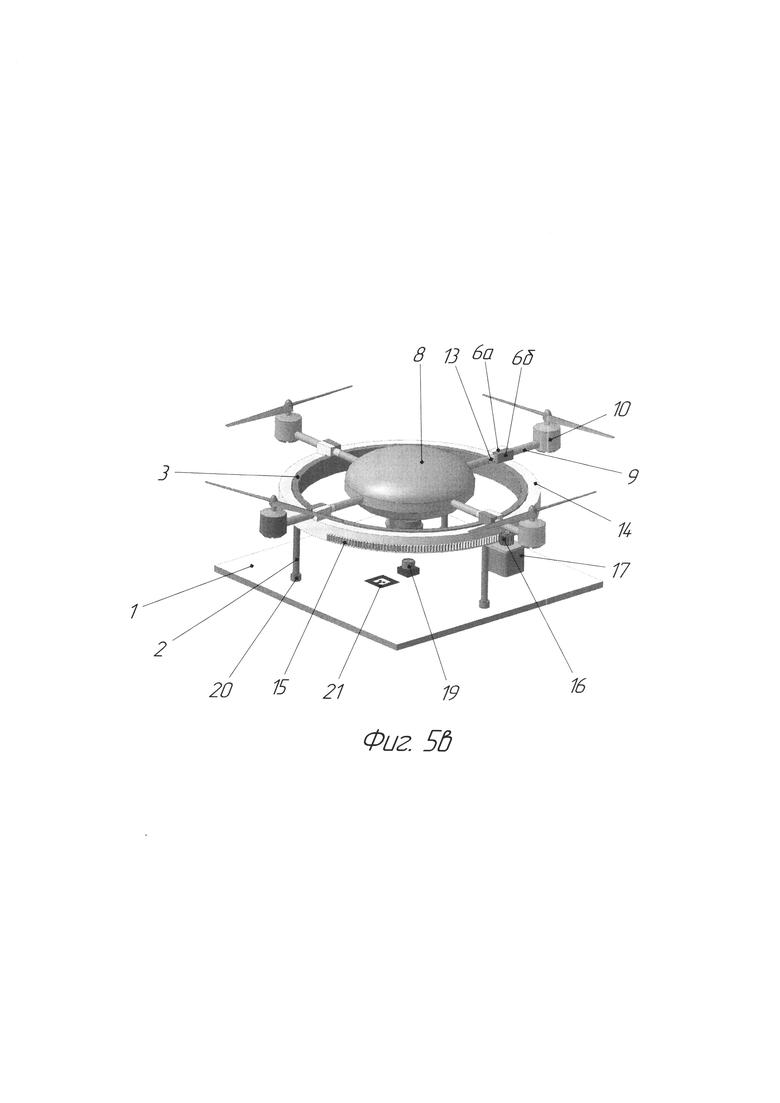
На фиг. 5в изображена посадочная платформа по фиг. 5а с позиционированным и зафиксированным БПЛА.
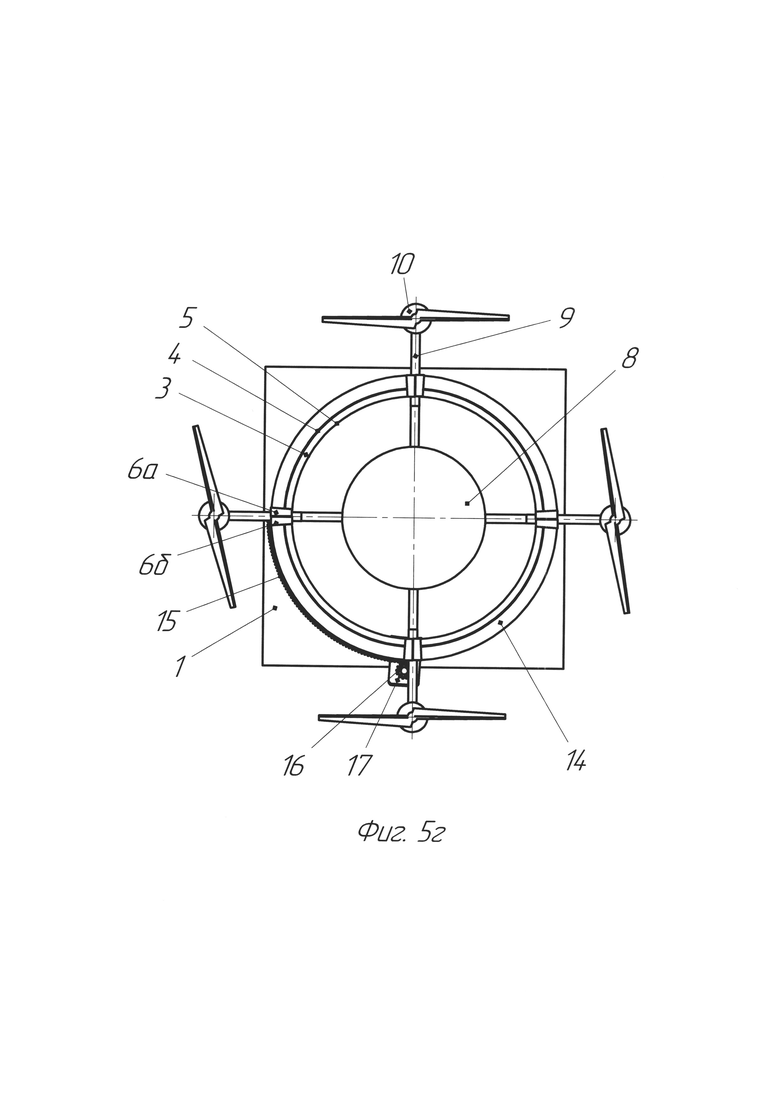
На фиг. 5г изображена посадочная платформа вид сверху по фиг. 5в с позиционированным и зафиксированным БПЛА.
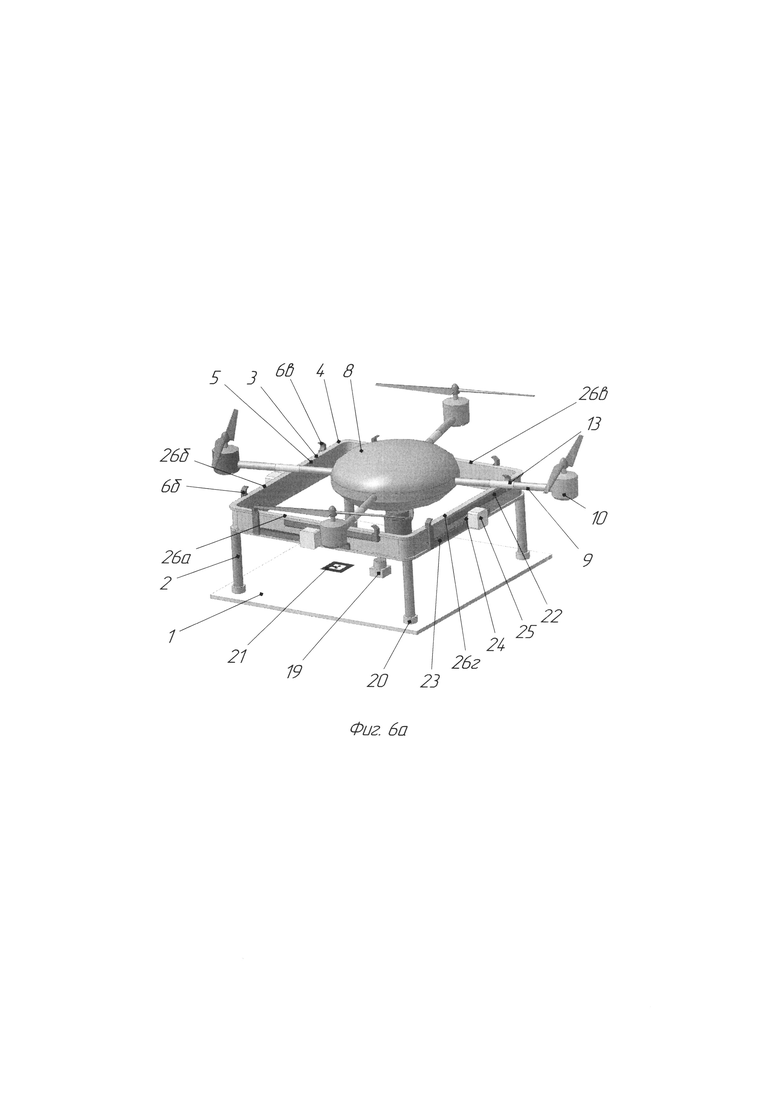
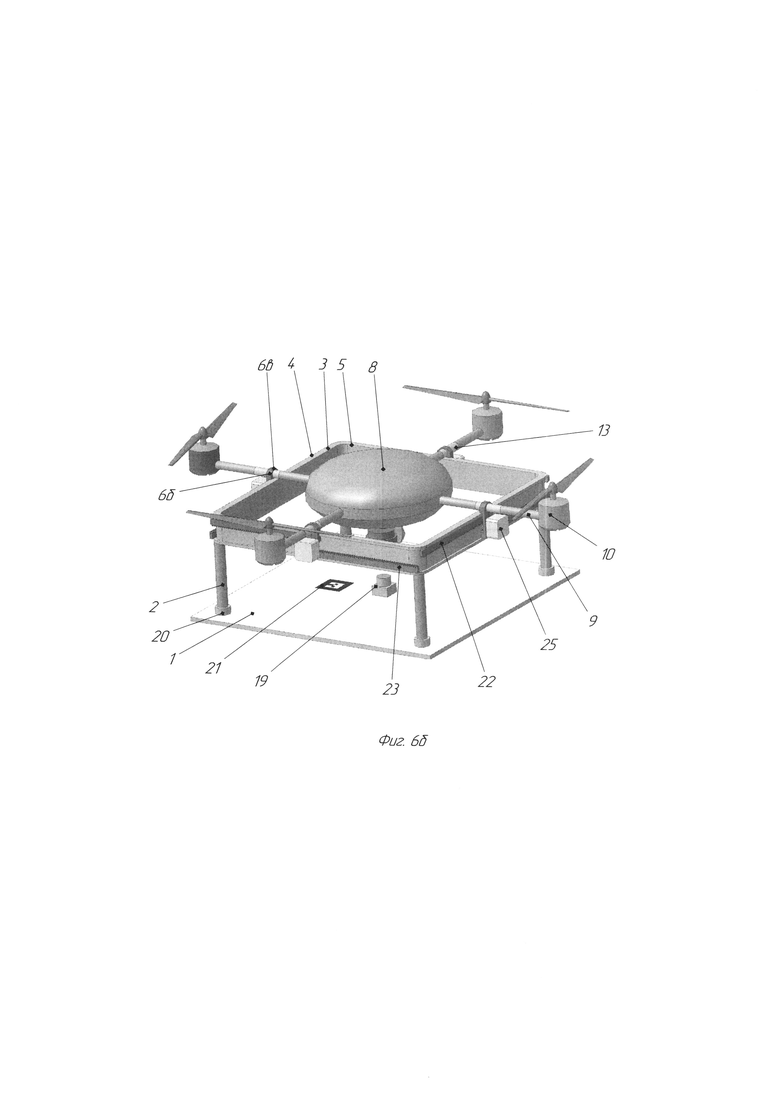
На фиг. 6а изображен вариант исполнения посадочной платформы, в котором посадочная площадка выполнена в виде рамки с выпуклым наружным контуром, представляющей собой многогранник (квадрат) с приземлившимся БПЛА.
На фиг. 6б изображена посадочная платформа фиг. 6а с позиционированным и зафиксированным БПЛА.
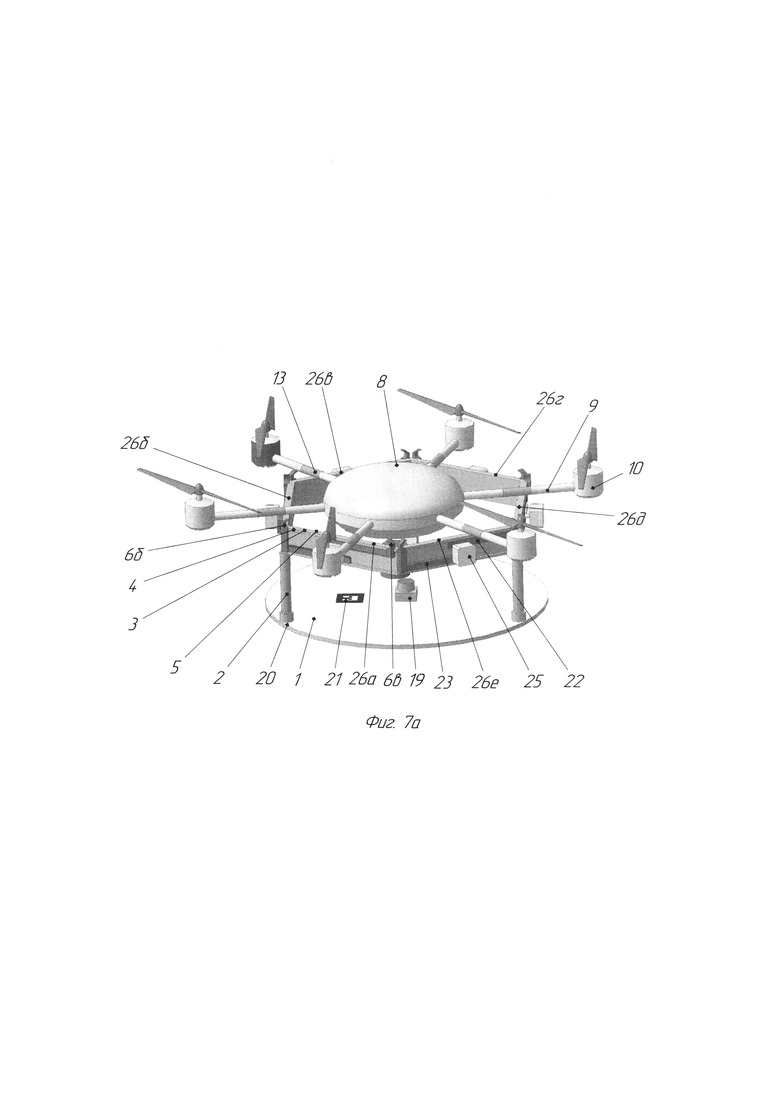
На фиг. 7а изображен вариант исполнения посадочной платформы, в котором посадочная площадка выполнена в виде рамки с выпуклым наружным контуром, представляющей собой многогранник (шестигранник) с приземлившимся БПЛА.
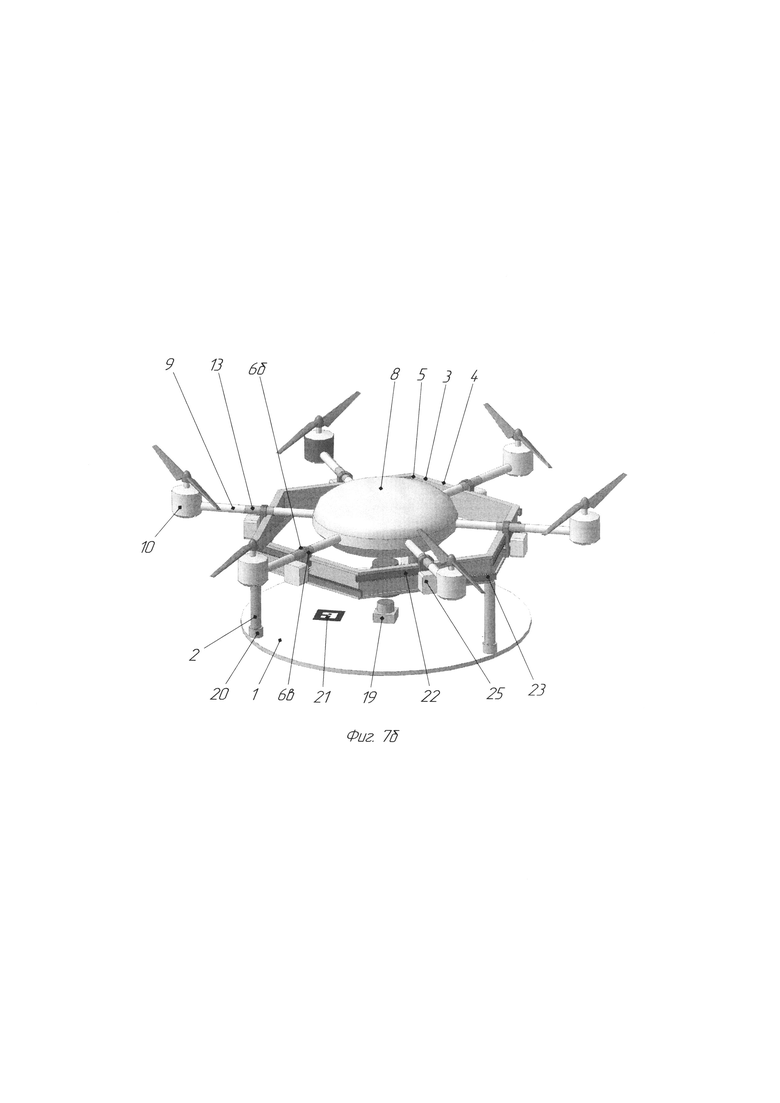
На фиг. 7б изображена посадочная платформа фиг. 7а с позиционированным и зафиксированным БПЛА.
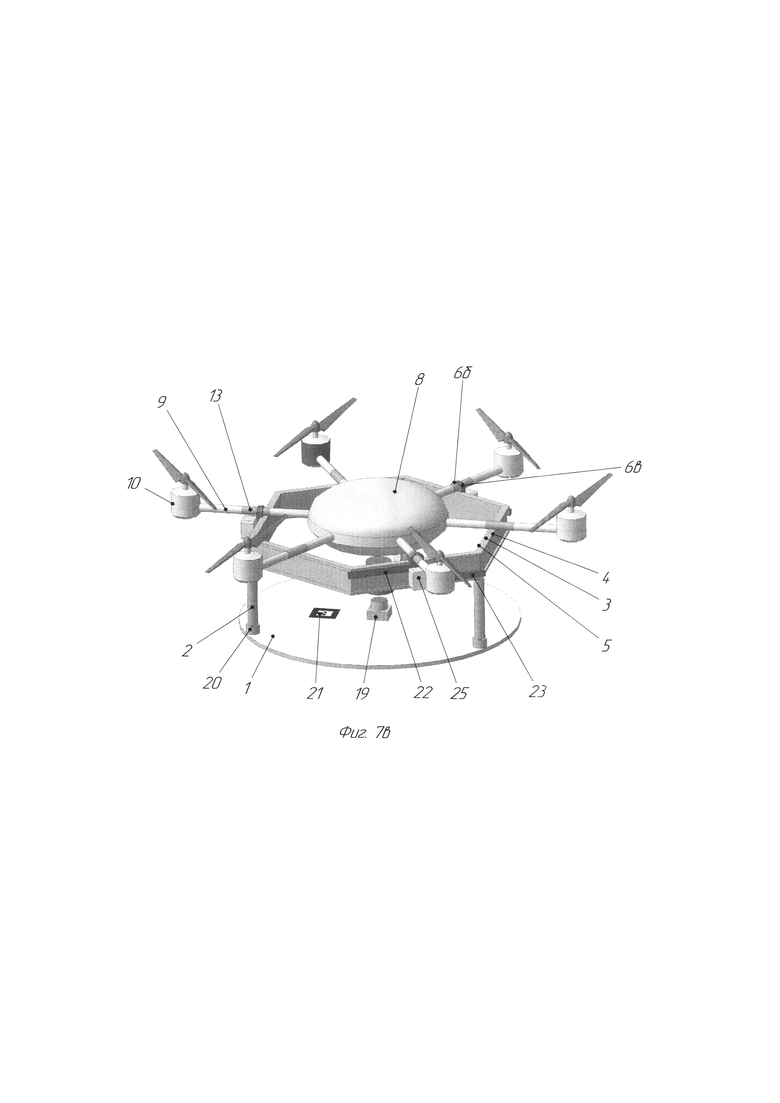
На фиг. 7в изображен вариант исполнения посадочной платформы, в котором посадочная площадка выполнена в виде рамки с выпуклым наружным контуром, представляющей собой многогранник (шестигранник) и содержит шесть толкателей с позиционированным и зафиксированным БПЛА.
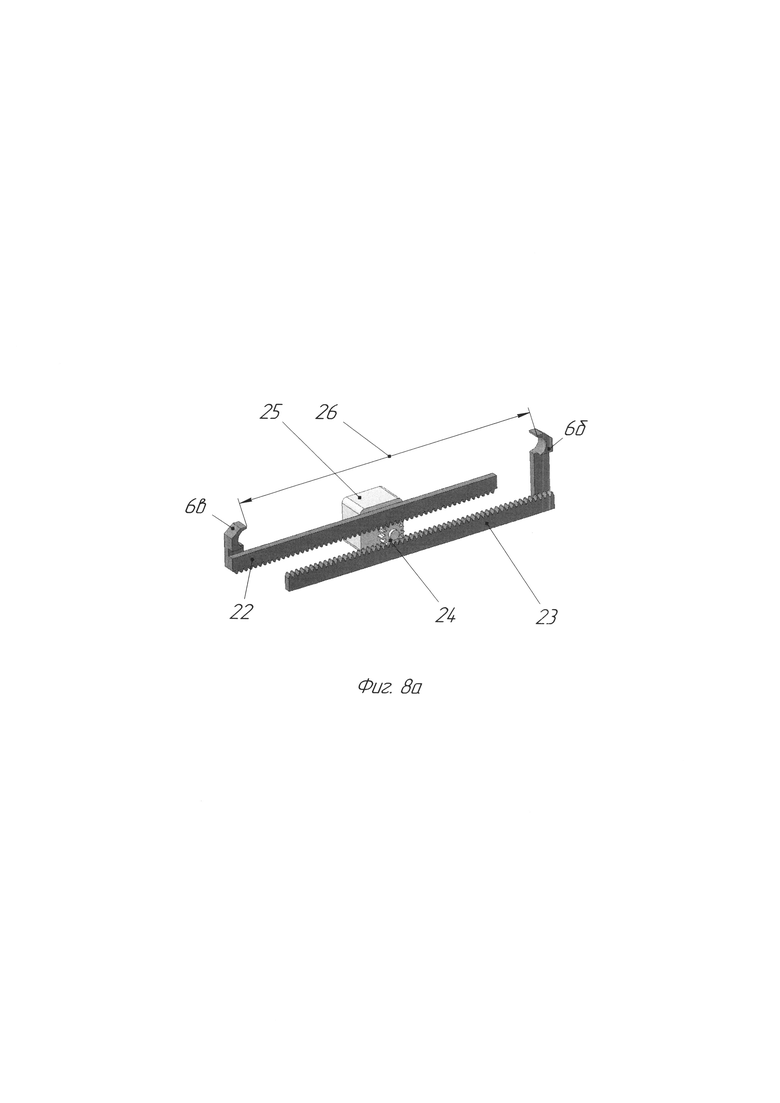
На фиг. 8а изображен вариант исполнения привода перемещения пары смыкающихся толкателей в виде двух установленных зубчатых реек, которые входят в зацепление с общей шестерней, которая соединена с двигателем.
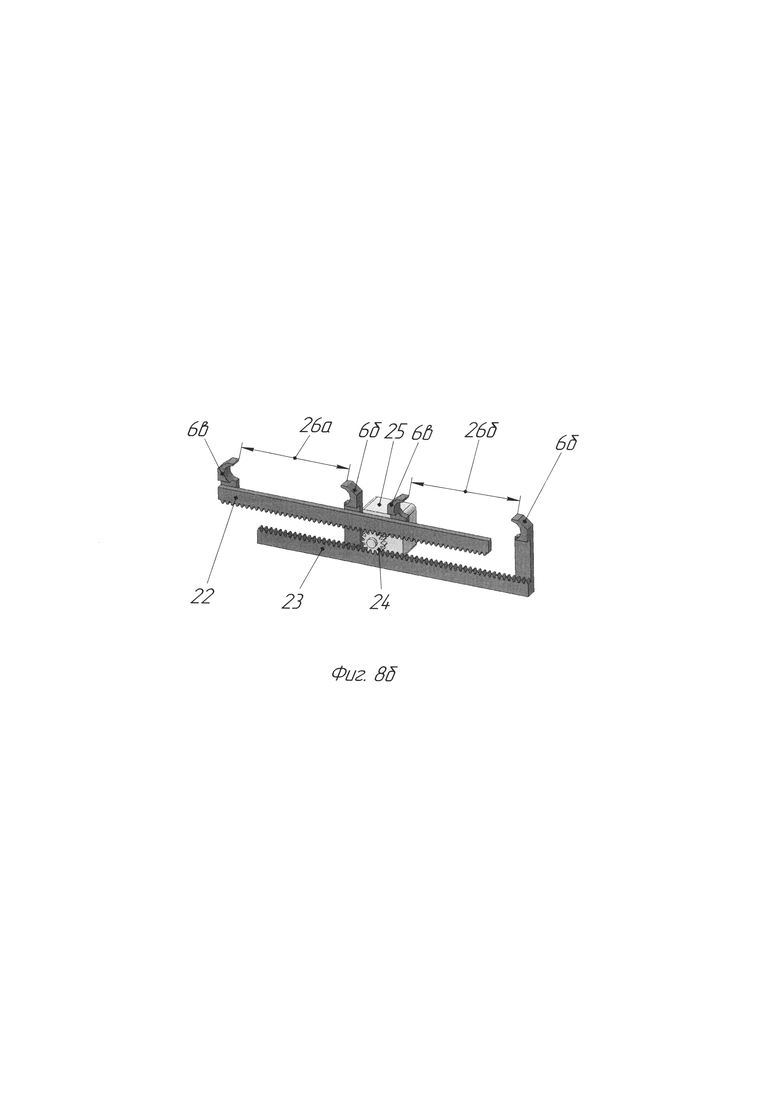
На фиг. 8б изображен вариант исполнения привода перемещения группы из двух пар смыкающихся толкателей в виде двух установленных зубчатых реек, которые входят в зацепление с общей шестерней, которая соединена с двигателем.
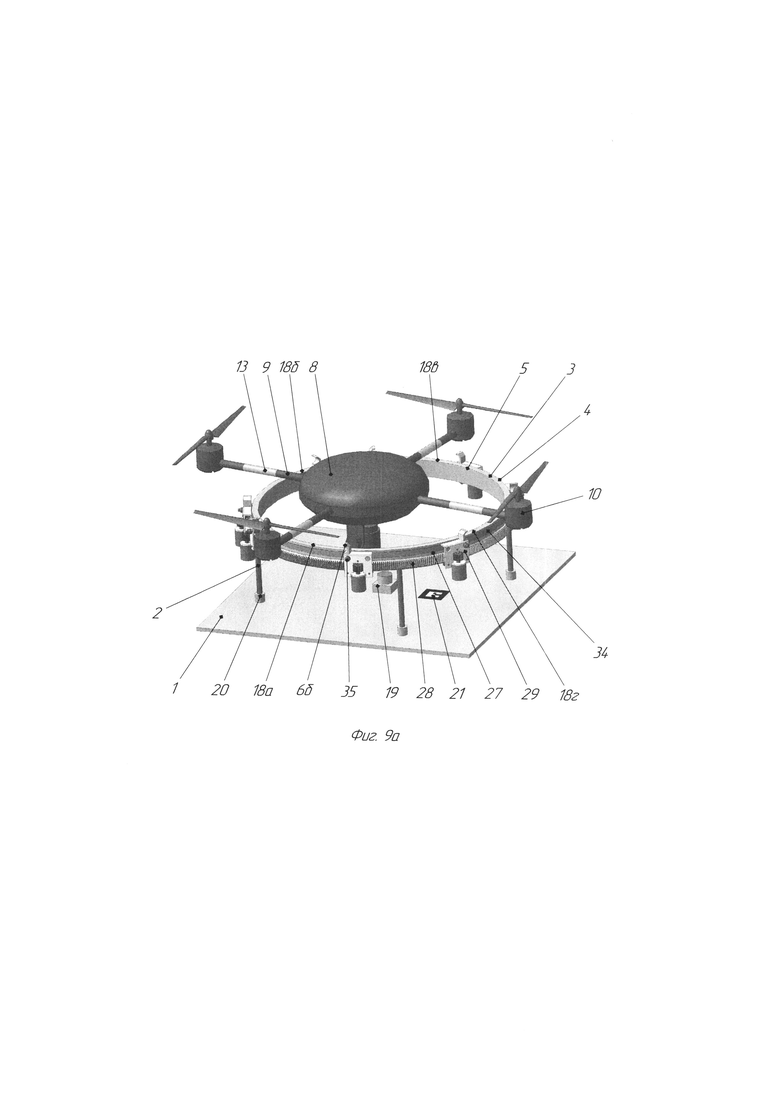
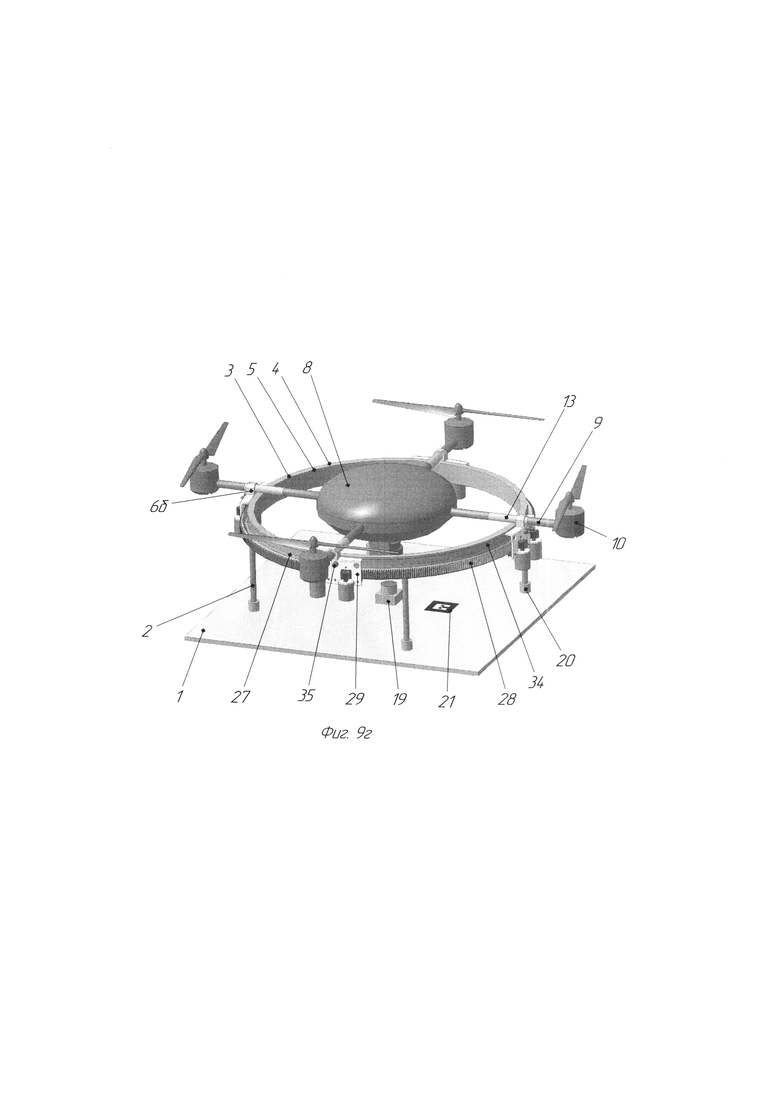
На фиг. 9а изображен вариант исполнения посадочной платформы с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющей собой круг, и содержит восемь подвижных толкателей с индивидуальными приводами, с приземлившимся БПЛА с четырьмя лучами.
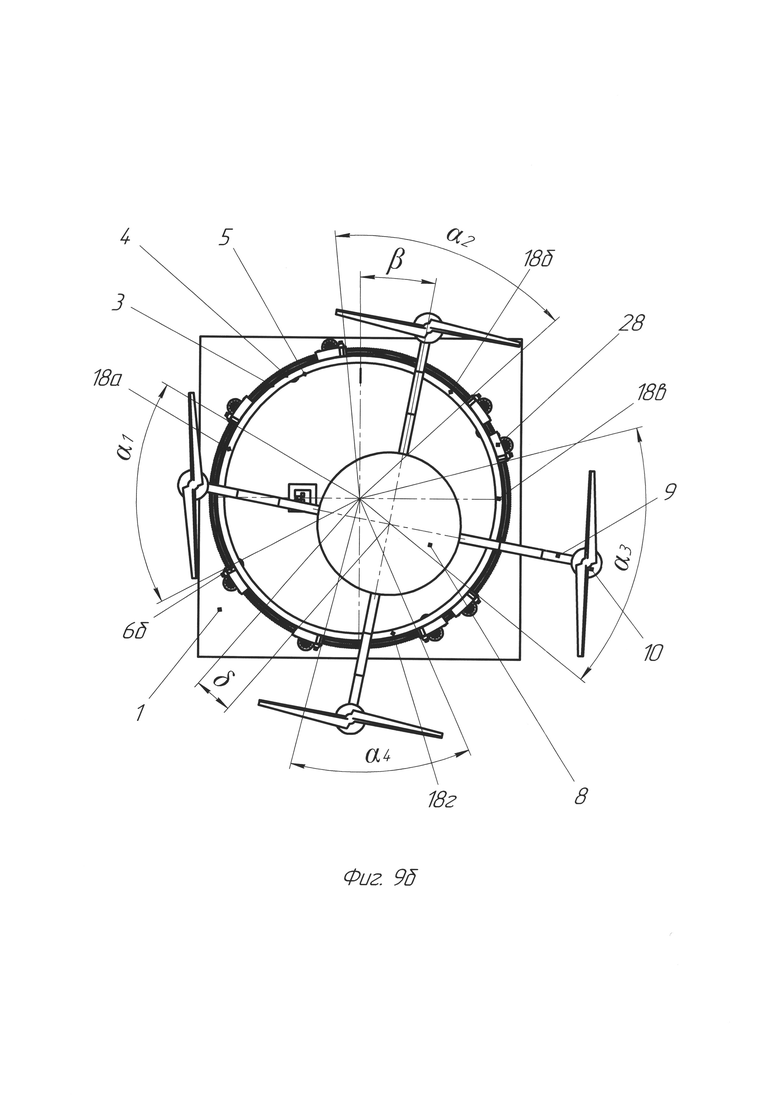
На фиг. 9б изображена посадочная платформа фиг. 9а вид сверху.
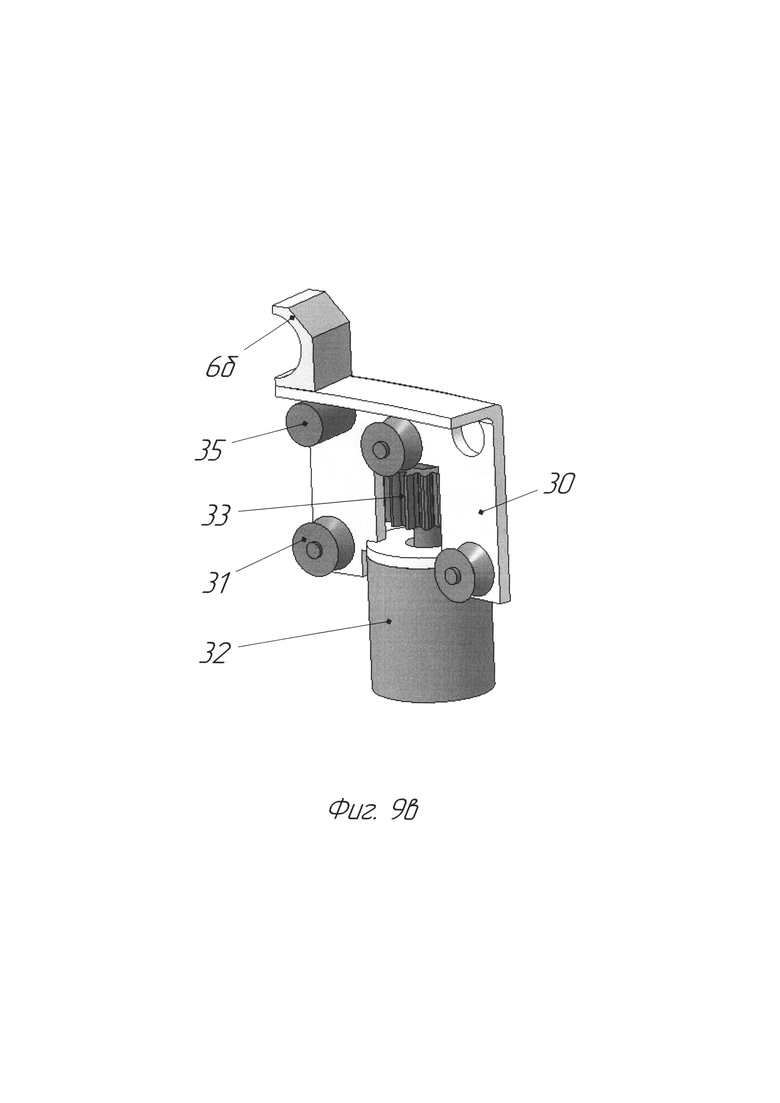
На фиг. 9в изображен вариант исполнения индивидуального привода подвижного толкателя.
На фиг. 9г изображена посадочная платформа фиг. 9а с позиционированным и зафиксированным БПЛА с четырьмя лучами.
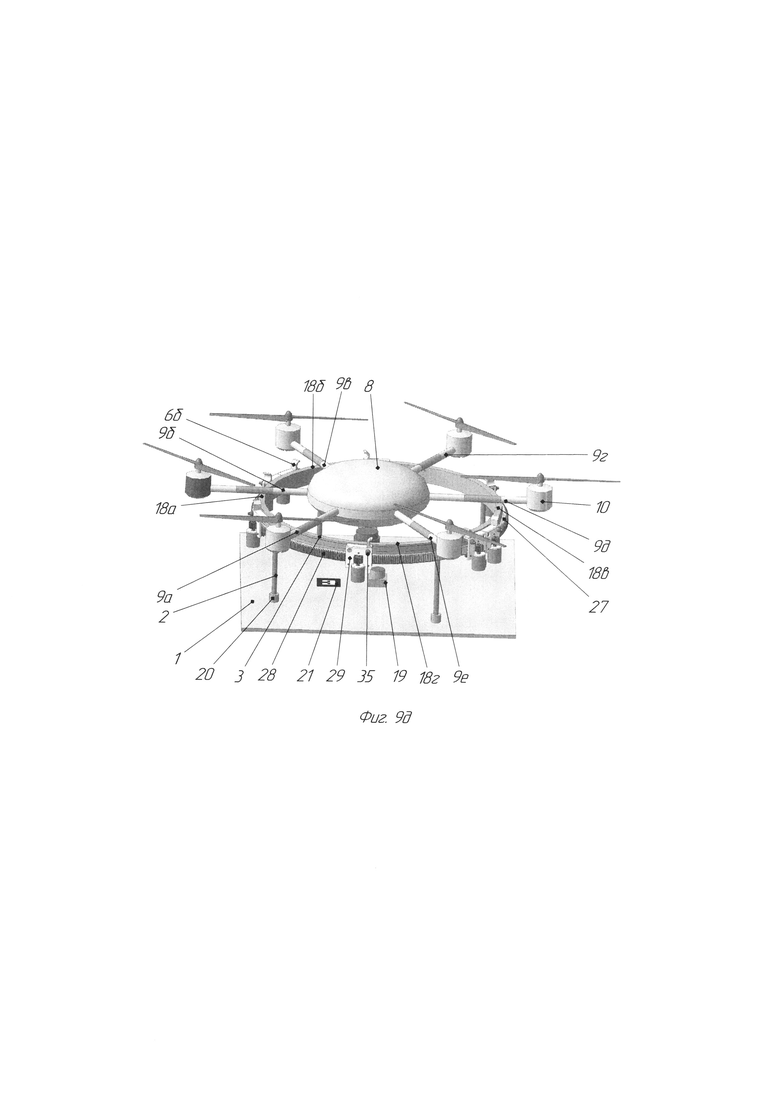
На фиг. 9д изображена посадочная платформа фиг. 9а с приземлившимся БПЛА с шестью лучами и восемью подвижными толкателями.
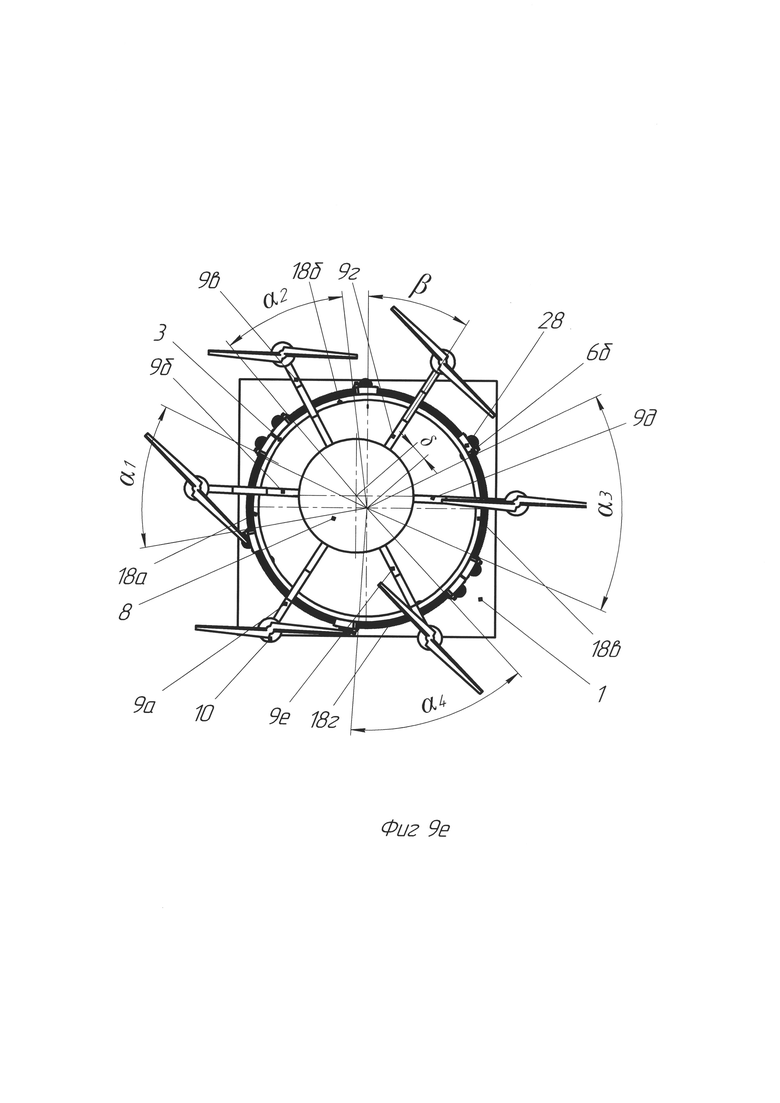
На фиг. 9е изображена посадочная платформа фиг. 9д, вид сверху.
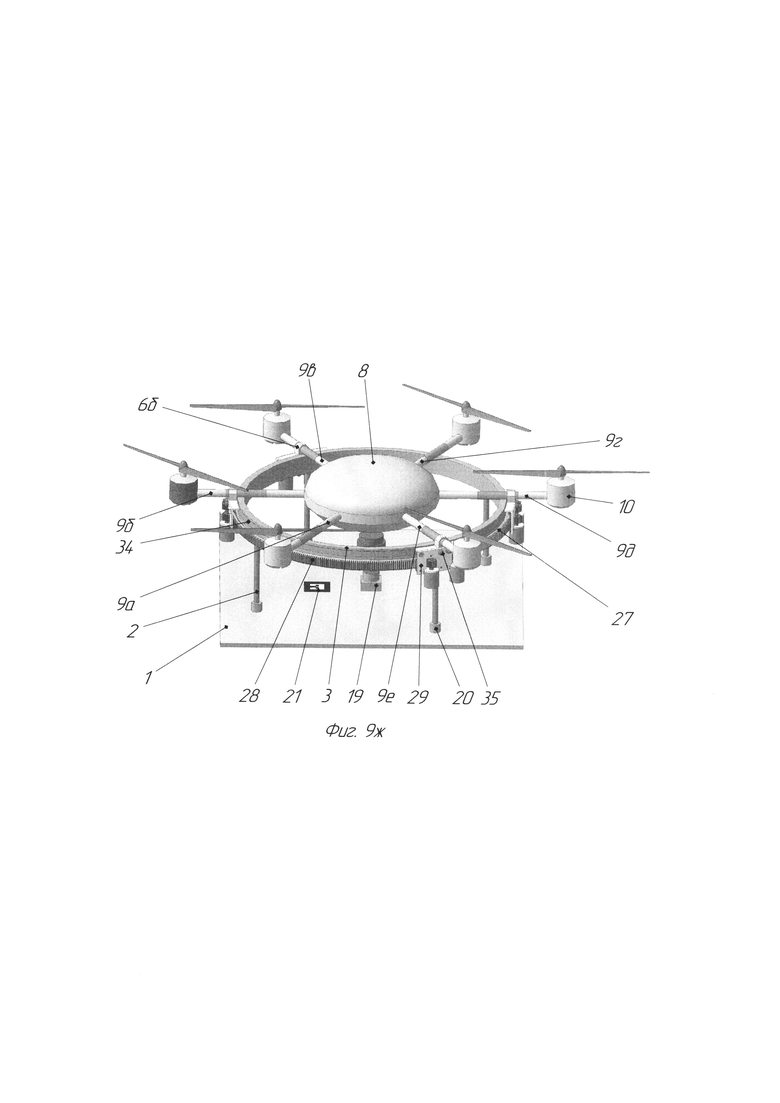
На фиг. 9ж изображена посадочная платформа фиг. 9д с позиционированным и зафиксированным БПЛА с шестью лучами.
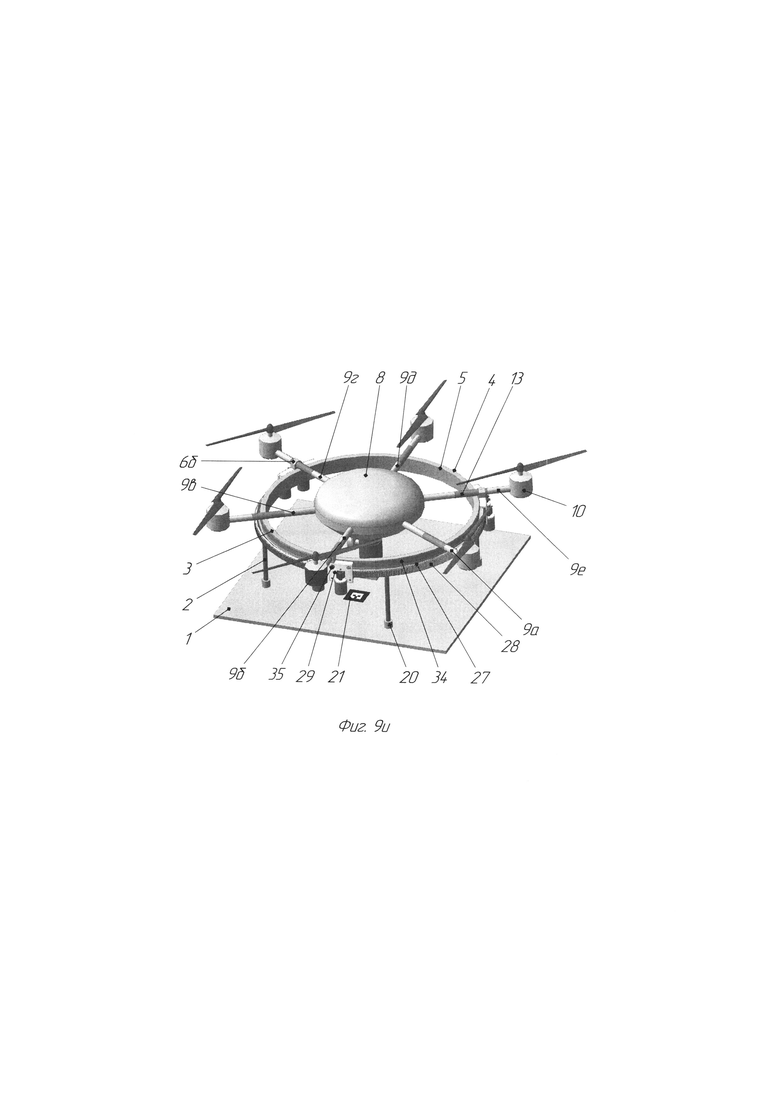
На фиг. 9и изображен вариант исполнения посадочной платформа с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющим собой круг и шестью подвижными толкателями, с позиционированным и зафиксированным БПЛА с шестью лучами.
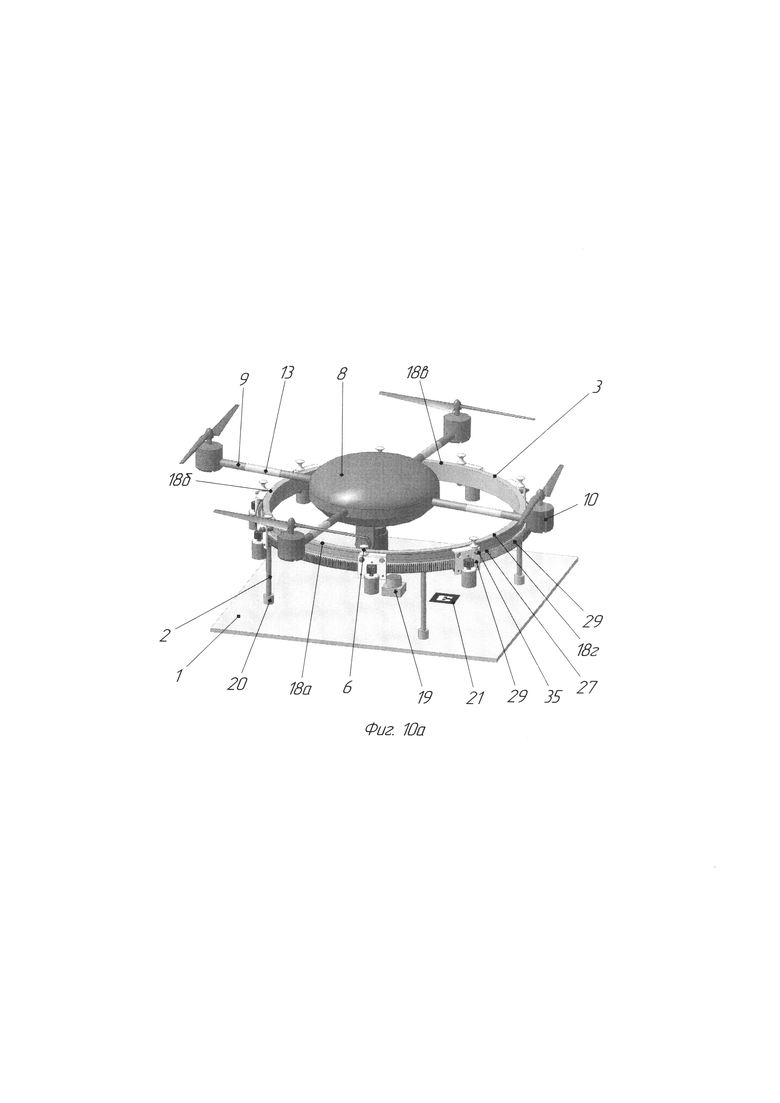
На фиг. 10а изображен вариант исполнения посадочной платформы с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющей собой круг, и содержит восемь подвижных толкателей в виде роликов с приземлившимся БПЛА с четырьмя лучами.
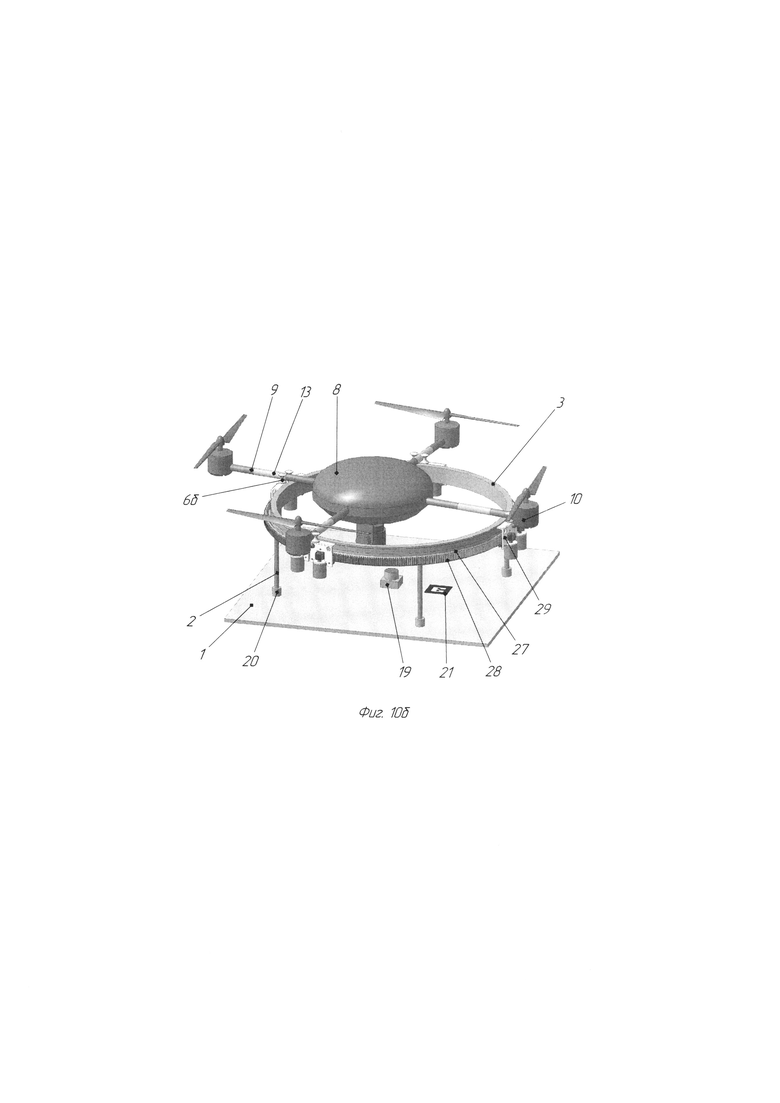
На фиг. 10б изображен вариант исполнения посадочной платформы фиг. 10а, в котором толкатели произвели фиксацию приземлившегося БПЛА с четырьмя лучами без позиционирования.
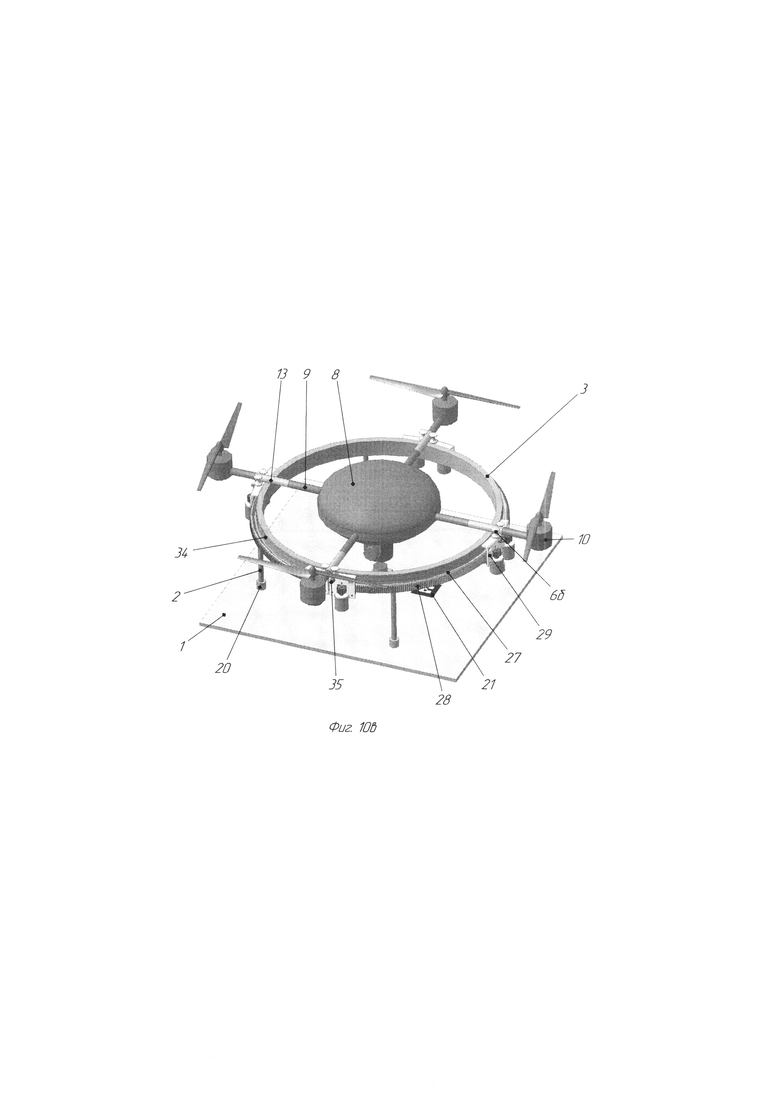
На фиг. 10в изображен вариант исполнения посадочной платформы фиг. 10а, в котором толкатели произвели позиционирование приземлившегося БПЛА с четырьмя лучами.
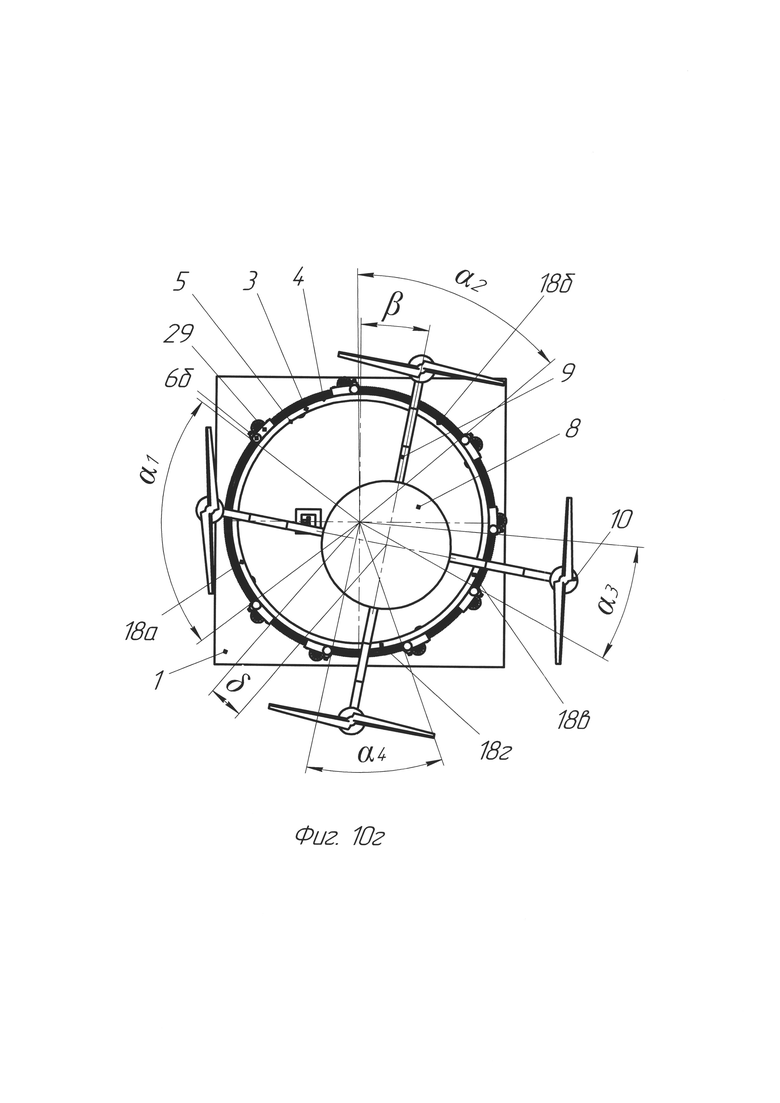
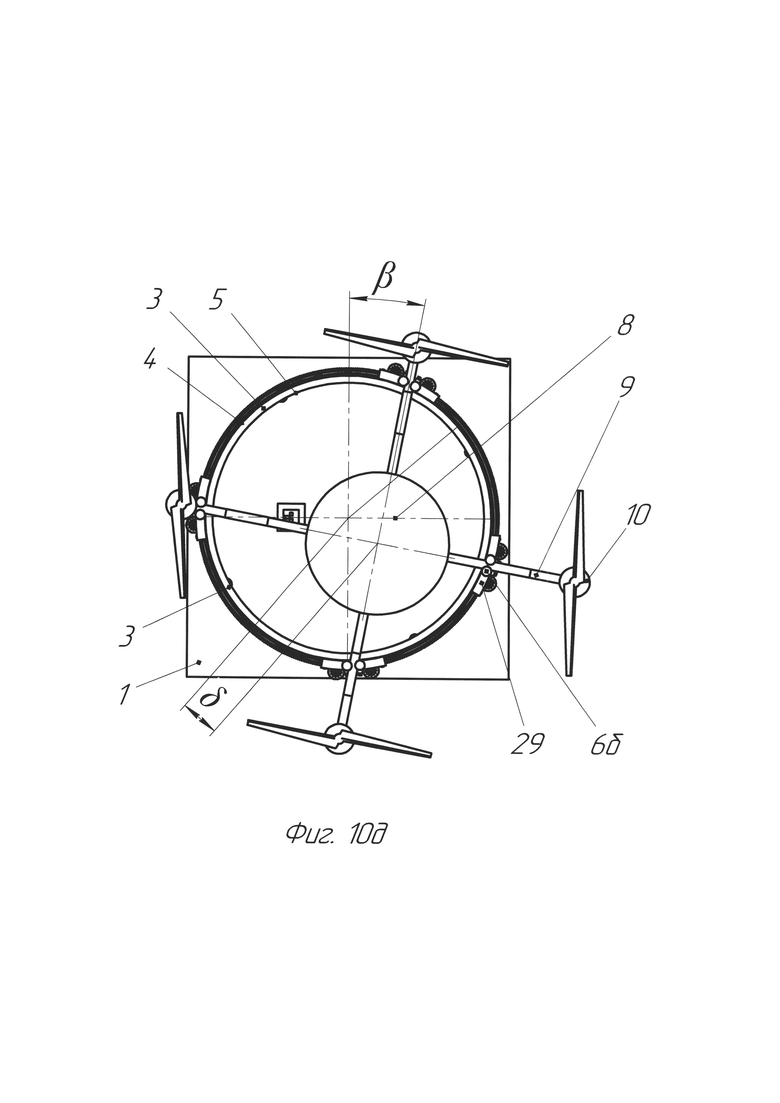
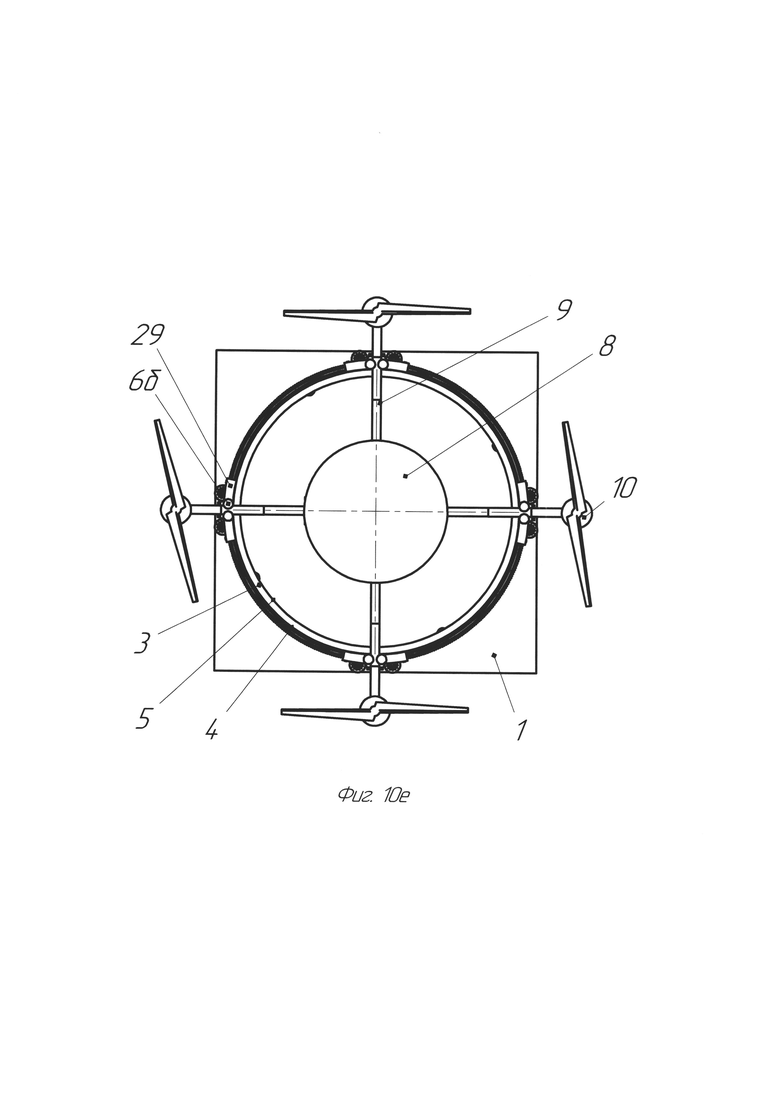
На фиг. 10г, 10д, 10е показаны виды сверху фиг. 10а, 106, 10в, демонстрирующих последовательность приземления, фиксирования и позиционирования БПЛА 8.
Посадочная платформа для БПЛА фиг. 1а, 1б, 1в содержит основание 1, на котором на опорах 2 установлена посадочная площадка 3, выполненная в виде рамки с выпуклым наружным контуром 4, который может быть в виде круга (фиг. 1а), выпуклого многоугольника (фиг. 16), комбинированной выпуклой фигуры (фиг. 1в), состоящей из сопряженных (соединенных) между собой прямых отрезков и дуг или нескольких дуг, при этом дуги могут иметь одинаковые или различные радиусы. Верхняя поверхность посадочной площадки 3 выполнена плоской. Внутренний контур 5 рамки посадочной площадки 3 может быть эквидистантным наружному контуру 4 или иметь иную выпуклую форму. Размер внутреннего контура 5 превышает размер корпуса принимаемого БПЛА.
Фигура с выпуклым контуром характеризуется тем, что она всегда лежит по одну сторону от каждой из его грани (прямого отрезка) или касательной, проведенной к любой точке, каждой из дуг, образующих фигуру.
Такая посадочная площадка 3 предназначена для приземления на него БПЛА непосредственно на его лучи и не требует наличия у него специальных шасси (опор), что упрощает и облегчает конструкцию БПЛА.
Посадочная платформа содержит устройство позиционирования и фиксации БПЛА, которое содержит выступающие над посадочной площадкой 3 толкатели 6, которые могут быть неподвижными 6а и подвижными 66 или только подвижными 66, а также могут быть идентичными или различными по форме. Общее количество толкателей 6 четно. Количество неподвижных 6а толкателей не может превышать количества подвижных 6б толкателей. На фиг. 1а, 1б, 1в изображены идентичные толкатели 6 в виде вертикальных стоек. Неподвижные толкатели 6а могут быть установлены на неподвижные элементы посадочной платформы, в том числе непосредственно на посадочную площадку 3. Подвижные толкатели 6б установлены на приводы линейных перемещений 7, которые могут быть индивидуальным для каждого подвижного толкателя 6б, общим для группы подвижных толкателей 6б, движущихся синхронно в одном направлении или общим для синхронного перемещения групп подвижных толкателей 6б, движущихся синхронно навстречу друг другу. Приводы 7 перемещения подвижных толкателей 6б могут перемещать подвижные толкатели 6б вдоль наружного 4 или внутреннего 5 контура рамки посадочной площадки 3. На фиг. 1а, 1б, 1в приводы 7 перемещения подвижных толкателей 6б перемещают подвижные толкатели 6б вдоль наружного контура посадочной площадки 3.
На фиг. 1а неподвижные толкатели 6а установлены непосредственно на посадочную площадку 3, а подвижные толкатели 6б - на привод перемещения 7. На фиг. 1б и 1в имеются только подвижные толкатели 6б, которые установлены на привод перемещения 7, которые являются общими для синхронного перемещения групп подвижных толкателей 6б, движущихся синхронно навстречу друг другу. Стрелками изображены направления движения подвижных толкателей 6б при позиционировании и фиксации БПЛА на посадочной площадке 3.
Толкатели 6 предназначены для позиционирования и фиксации БПЛА 8 путем воздействия на его лучи 9.
На фиг. 2а, 2б, 2в изображены варианты исполнения посадочных площадок 3, выполненных в виде рамки с выпуклым наружным контуром 4, представляющих собой многоугольник (восьмигранник). Посадочная площадка 3 вариант исполнения фиг. 2а предназначена для приземления БПЛА 8 с радиальным расположением лучей 9. Посадочные площадки 3 варианты исполнения фиг. 2б и 2в предназначены для приземления БПЛА 8 с продолговатым корпусом и с четырьмя (фиг. 2б) или шестью (фиг. 2в) расходящимися лучами 9.
На фиг. 2г, 2д изображены варианты исполнения посадочных площадок 3, выполненных в виде рамки с выпуклым наружным контуром 4, которая состоит из сопряженных (соединенных) между собой прямых отрезков и дуг. Данная посадочная площадка предназначена для БПЛА 8 с продолговатым корпусом и четырьмя (фиг. 2г) или шестью (фиг. 2д) расходящимися лучами 9.
Конкретная форма посадочной площадки 3 зависит от конфигурации БПЛА 8, на приземление которого она рассчитана.
Построение фигуры посадочной площадки 3 в виде рамки для конкретной конфигурации БПЛА 8 базируется на следующих принципах:
- размер внутреннего контура 5 рамки должен превышать размер корпуса принимаемого БПЛА 8;
- наружный 4 и внутренний 5 контуры рамки могут быть выполнены эквидистантными друг другу;
- величина перемещения корпуса БПЛА 8 внутри контура 5 рамки посадочной площадки 3 определяет допустимое отклонение БПЛА 8 при приземлении БПЛА 8 на посадочную площадку 3;
- длина лучей 9 БПЛА 8 должна позволять перемещать БПЛА 8 в пределах внутреннего контура 5 рамки посадочной площадки 3 без задевания двигателей 10 или элементов крепления двигателей 10 наружного контура 4 рамки посадочной площадки 3. Если это условие не выполняется, возможное задевания двигателей 10 о наружный контур 4 рамки посадочной площадки 3 ограничивает допустимое отклонение БПЛА 8 при приземлении БПЛА 8.
Максимальная величина допустимого отклонения БПЛА 8 с заданной длиной лучей 9 при приземлении реализуется при одновременном касании корпусом БПЛА 8 внутреннего контура 5 рамки посадочной площадки 3 и двигателями 10 наружного контура 4 рамки посадочной площадки 3. Соотношение размеров лучей 9 БПЛА 8 и посадочной площадки 3 таково, что средняя линия 11 рамки посадочной площадки 3, проходящая на равном расстоянии от наружного 4 и внутреннего 5 контура при расположении корпуса БПЛА 8 в центре посадочной площадки 3 будет лежать на середине лучей 9 БПЛА 8. Под размерами корпуса БПЛА 8 понимаются размеры той части корпуса БПЛА 8, которые взаимодействуют с внутренним контуром 5 рамки посадочной площадки 3, т.е. размеры корпуса БПЛА 8, расположенные ниже линии касания лучами 9 БПЛА 8 плоскости посадочной площадки 3. Если размеры корпуса БПЛА 8 меняются по высоте, принимается его максимальное значение, которое ограничивает движение корпуса внутри контура 5.
На фиг. 2а-2д приняты следующие обозначения:
Rк - радиус корпуса БПЛА 8 на месте расположения луча 9.
Rл - радиус, проходящий через концы лучей 9 БПЛА 8; Rк и Rл выходят из одной точки, разница их представляет собой длину луча 9.
Rв - радиус внутреннего контура 5 рамки посадочной площадки 3 в направлении данного луча 9.
Rн - радиус наружного контура 4 посадочной площадки 3 в направлении данного луча 9.
R2 - радиус средней линии 11 рамки посадочной площадки 3 как среднее между радиусами Rв и Rн.

Перемещение корпуса БПЛА 8 ограничено контактом с внутренним контуром 5 посадочной площадки 3 в направлении данного луча 9 величиной

С другой стороны, данный луч 9 БПЛА 8 ограничен в перемещении наружным контуром 4 посадочной площадки 4 величиной длины лучей 9 на

Радиус оптимального места расположения средней линии 11 рамки посадочной площадки 3 определяется из условия равенства X1 и Х2

При этом ограничения перемещений, создаваемые внутренним 5 и наружным 4 контурами посадочной площадки 3, равны и имеют максимально возможное для данного луча 9 значение, т.е. X1=Х2.
Для построения средней линии 11 рамки посадочной площадки 3 определяют радиусы R2 для каждого луча 9 и чертят прямые или дугу перпендикулярно осевой линии луч 9. Радиус дуги может быть равным или большим, чем R2 и ось его находится на продолжении осевой линии луча 9. Далее полученные линии соединяют в замкнутый контур, достраивая при необходимости дополнительные линии, например, вдоль корпуса БПЛА 8 или скругляют. Оптимальная средняя линия 11 не должна иметь вогнутостей внутрь, т.е. фигура должна быть выпуклой. Применительно к многоугольникам - это выпуклый многоугольник. Для БПЛА 8 с радиальным расположением лучей 9 наиболее подходящими являются круг или правильный многоугольник, с количеством сторон равным и больше, чем количество лучей 9 БПЛА 8.
На фиг. 3 изображен вариант приземления БПЛА 8 на посадочную площадку 3 варианта исполнения фиг. 26. Стрелка показывает направление движения БПЛА 8 при позиционировании, конец стрелки показывает точку позиционирования БПЛА 8, куда должен переместиться центр корпуса БПЛА 8. Данная точка может находиться центре посадочной площадки 3. Отклонение БПЛА 8 при приземлении от центра посадочной площадки 3 обозначено буквой {X}. Тонкими штриховыми линиями изображен фантом БПЛА 8 после позиционирования.
Толкатели 6, которые как было сказано выше, могут быть идентичными или различными по форме, и выполнены в виде:
- вертикальных стоек, как показано на фиг. 1а, 1б, 1в;
- ложементов, повторяющих и охватывающих лучи 9 БПЛА 8, как показано на фиг. 4а;
- ложементов V-образной формы, как показано на фиг. 4б;
- вращающихся или не вращающихся направляющих роликов различной формы, как показано на фиг. 4в, 4г.
Толкатели 6 устанавливаются на неподвижные элементы конструкции посадочной площадки или приводы перемещения толкателей 7 жестко или через упругий элемент, обеспечивающий выравнивание усилия замыкания, вызванное неточностями расположения и для обеспечения необходимого поджатия.
Посадочная площадка может содержать общее количество толкателей 6 от шести до двукратного количества лучей 9 принимаемого БПЛА 8 с наибольшим количеством лучей 9.
Количество неподвижных толкателей 6а (фиг. 1а) не превышает количества подвижных толкателей 6б.
Минимальное общее количество толкателей 6 может быть равным шести. Минимальное общее количество толкателей 6 определяется тем, что воздействуя толкателями 6 не менее чем на три луча 9 БПЛА 8, возможно правильное позиционирование БПЛА 8 на посадочной площадке 3. Если посадочная платформа эксплуатируется в стационарных условиях и нет необходимости удержания БПЛА 8 от вибрации, общее количество неподвижных толкателей 6а и подвижных толкателей 6б может быть минимальным, то есть шесть, в разных вариантах сочетания количества неподвижных 6а и подвижных толкателей 6б, но с учетом того, что количество неподвижных толкателей 6а не может быть больше подвижных толкателей 6б.
Максимальное общее количество толкателей 6 не превышает двукратного количества лучей 9 принимаемого БПЛА 8 с наибольшим количеством лучей 9. Максимальное общее количество установленных на посадочной платформе толкателей 6 определяется принимаемым БПЛА 8 с максимальным количеством лучей 9 при условии, что необходимо зафиксировать каждый луч 9 принимаемого БПЛА 8. В этом случае необходимо иметь количество толкателей 6 равное двукратному количеству лучей 9 принимаемого БПЛА 8 с максимальным количеством лучей 9, так как каждый луч 9 фиксируется двумя толкателями 6. При этом количество неподвижных 6а толкателей не превышает количество подвижных 6б толкателей.
Толкатели 6 в виде вертикальных стоек (фиг. 1а-1в) позволяют перемещать и удерживать (зафиксировать) лучи 9 в горизонтальном направлении при позиционировании БПЛА 8, однако они не способны удержать (зафиксировать) БПЛА 8 в вертикальном направлении (при вертикальной тряске посадочной платформы). Такие толкатели 6 могут быть использованы для стационарных посадочных платформ.
Толкатели 6 в виде ложементов (фиг. 4а, 4б) или направляющих роликов (фиг. 4в, 4г) обеспечивают перемещение лучей 9 в горизонтальном направлении при позиционировании БПЛА 8, а после захвата (обхвата лучей 9 с двух сторон) обеспечивают надежное фиксирование (удержание) при вертикальной тряске посадочной платформы. Такие толкатели 6 могут быть использованы на подвижных посадочных платформах.
Часть или все толкатели 6 (фиг. 4а-4е) могут содержать электрические контакты 12 для подачи напряжения для зарядки аккумулятора БПЛА 8 или обмена информаций БПЛА 8 с системой управления посадочной платформы (не показана). Контакты 12 могут быть как на одном из толкателей 6, так и на обоих. Один толкатель 6 может содержать несколько контактов 12. При этом контакты 12, установленные на один замыкающий луч 9 толкателях 6 могут быть как разной, так и одной полярности.
На лучах 9 БПЛА 8 в зоне захвата их толкателями 6 должны быть установлены ответные электрические контакты 13, которые замыкаются на контактах 12 толкателей 6.
На фиг. 4а, 4б, 4в, 4г представлены варианты электрических контактов 13, которые охватывают лучи 9. На фиг. 4д, 4е толкатели 6 и лучи 9 содержат несколько контактов 12а, 12б и 13а, 13б на фиг. 4д или 12а, 12б, 12в, 12г и 13а, 13б, 13г, 13д на фиг. 4е. Каждая пара из указанных контактов 12а…12д, 13а…13д замыкают свою линию электрической цепи для зарядки аккумулятора БПЛА 8 или обмена информации посадочной платформы с БПЛА 9.
Ниже приведены различные варианты исполнения посадочной платформы.
Посадочная платформа фиг. 5а содержит основание 1, на котором на опорах 2 установлена посадочная площадка 3, выполненная в виде рамки с наружным контуром 4 в виде круга. На посадочной площадке 3 установлены неподвижные толкатели ба. Привод перемещения подвижных толкателей 6б, обозначенный на фиг. 1а позицией 7, в данном варианте исполнения представляет собой поворотное кольцо 14, установленное снаружи посадочной площадки 3, на которое установлены подвижные толкатели 6б. Поворотное кольцо 14 содержит зубчатый сектор 15, который находится в зацеплении с шестерней 16 установленной на двигатель 17. Неподвижный 6а и подвижный 66 толкатели раздвинуты друг от друга и образуют на посадочной площадке 3 секторы 18а, 18б, 18в, 18г с равными углами α (см. фиг. 5б).
Посадочная платформа может содержать несколько поворотных колец 14, на каждом из которых установлены перемещаемые в одном направлении подвижные толкатели 66, соединенные с аналогичными приводами вращения поворотных колец 14. Поворотные кольца 14 могут быть установлены как снаружи рамки, так и внутри. Это обеспечивает движение толкателей 6б как вдоль наружного 4, так и внутреннего 5 контуров. При этом на посадочной площадке 3 могут отсутствовать неподвижные толкатели 6а.
Часть или все толкатели 6 могут содержать один или несколько электрических контактов 12 для подачи напряжения для зарядки аккумулятора БПЛА 8 или обмена информации посадочной платформы с БПЛА 8. На лучах 9 БПЛА 8 в зоне захвата их толкателями 6а и 6б должны быть установлены ответные электрические контакты 13, как представлены на фиг. 4а…4е.
На фиг. 5в изображена посадочная платформа фиг. 5а с позиционированным и зафиксированным БПЛА 8. На фиг. 5г изображен вид сверху посадочной платформы по фиг. 5в. Точка позиционирования данной посадочной площадки 3 находится в его геометрическом центре.
На фиг. 5б и 5г приняты следующие обозначения:
δ - отклонение приземляемого БПЛА 8 от центра посадочной площадки 3;
β - угол поворота лучей 9 относительно осей посадочной площадки 3;
α - угол раскрытия секторов 18а, 18б, 18в, 18г на посадочной площадке 3, образованный раздвинутыми друг от друга толкателями 6а и 6б, которые равны между собой.
Посадочная платформа фиг. 5а может содержать следующие датчики и маркеры для ориентации БПЛА 8 в процессе и после приземления на посадочную площадку 3 и информирования системы управления.
Датчик крайних положений (не показан) угла поворота поворотного кольца 14 относительно посадочной площадки 3 или встроенный в двигатель 17 энкодер (не показан), который определяет угол поворота α поворотного кольца 14 относительно посадочной площадки 3. Показания данного датчика определяют положение толкателей 6а и 6б друг относительно друга, позволяют контролировать угол раскрытия секторов 18а, 18б, 18в, 18г и смыкание толкателей 6а и 6б на лучах 9 БПЛА 8.
Датчик положения БПЛА 8 на посадочной площадке 3 и угла β поворота лучей 9 БПЛА 8 относительно посадочной площадки 3 в процессе и после приземления. На фиг. 5а датчик положения представлен в виде одной видеокамеры 19, установленной на основании 1. При необходимости количество видеокамер 19 может быть увеличено. Данный датчик, показания которого подлежат обработке системой управления (не показана) посадочной платформой, позволяет определить величину δ отклонения приземляемого БПЛА 8 от центра посадочной площадки 3 и угол β поворота лучей 9 относительно осей посадочной площадки 3 в процессе и после приземления на посадочную площадку 3. Показания данного датчика могут быть использованы для задания угла раскрытия α толкателей 6а и 6б в процессе приземления БПЛА 8 на посадочную площадку 3 с целью успешного приземления БПЛА 8 при минимальной величине зон 18а, 18б, 18в, 18г на посадочной площадке 3.
Видеокамера 19 может также фиксировать местоположение толкателей 6а и 6б, а также величину поворота наружного кольца 14.
Датчик приземления БПЛА 8 на посадочную площадку 3. На фиг. 5а датчик приземления выполнен в виде датчика веса 20, который установлен под каждую опору 2 посадочной площадки 3. Количество опор 2 (соответственно датчиков веса 20) должно быть не менее трех. Показания данного датчика позволяют установить факт приземления БПЛА 8 на посадочную площадку 3, а также рассчитать точную координату приземления БПЛА 8 на посадочной площадке 3.
Графический (световой или иной) маркер 21 для ориентации БПЛА 8 при приземлении. Маркер 21 используется системой управления БПЛА 8 для ориентирования при приземлении на посадочную площадку 3.
Посадочная платформа может содержать другие виды датчиков для контроля параметров приземления БПЛА 8, погодных и других условии работы и взаимодействия посадочной платформы с БПЛА 8 и работы элементов устройств позиционирования, захвата лучей 9 (фиксации) БПЛА 8, выполнения работ по зарядке аккумуляторов, обмену информации, погрузки/разгрузки БПЛА 8 и т.п.
Система управления посадочной платформой содержит контроллерную систему сбора и обработки информации и управления (не показана), обеспечивающую контроль в процессе и после приземления БПЛА 8, управление приводами толкателей 66, а также блок связи с принимаемым БПЛА 8 и устройство зарядки аккумулятора БПЛА 8 (не показаны).
БПЛА 8 может содержать опоры (не показаны) для приземления на горизонтальную поверхность вне посадочной площадки 3. Опоры не должны быть расположены в зоне взаимодействия лучей 9 БПЛА 8 с рамкой посадочной площадки 3. Например, они могут быть установлены на корпус БПЛА 8 или в зоне расположения двигателей 10 (не показаны).
На фиг. 6а изображен вариант исполнения посадочной платформы, в котором посадочная площадка 3 выполнена в виде рамки с выпуклым наружным контуром 4, выполненным в виде многогранника (квадрата).
На фиг. 6б изображена посадочная платформа фиг. 6а с позиционированным и закрепленным БПЛА 8. Точка позиционирования данной посадочной площадки 3 находится в его геометрическом центре.
На фиг. 7а изображен вариант исполнения посадочной платформы, в котором посадочная площадка 3 выполнена в виде рамки с выпуклым наружным контуром 4, выполненным в виде многогранника (шестигранника) с приземлившимся БПЛА 8.
На фиг. 7б изображена посадочная платформа фиг. 7а с позиционированным и закрепленным БПЛА 8. Точка позиционирования данной посадочной площадки 3 находится в его геометрическом центре.
Посадочная платформа фиг. 6а, 7а содержит основание 1, на котором на опорах 2 установлена посадочная площадка 3, выполненная в виде рамки с выпуклым наружным контуром 4, представляющим собой многогранник (квадрат на фиг. 6а и шестигранник на фиг. 7а). Квадрат и шестигранник представляют собой правильные многогранники, которые являются также выпуклыми, т.е. фигура многогранника всегда лежит по одну сторону от любой стороны многогранника. Привод перемещения толкателей 6б и 6в (на фиг. 1б обозначен позицией 7) в данном варианте исполнения выполнен в виде двух параллельно установленных зубчатых реек 22, 23, которые входят в зацепление с общей шестерней 24, установленной на двигателе 25. Толкатели 6б и 6в установлены на соответствующие зубчатые рейки 22 и 23. Особенностью данного варианта исполнения посадочной платформы является отсутствие неподвижных толкателей поз. 6а. Толкатели 6б и 6в раздвинуты друг от друга и образуют на посадочной площадке 3 зоны 26а, 26б, 26в, 26г (на фиг. 6а) и зоны 26а, 26б, 26в, 26г, 26д и 26е (на фиг. 7а), равные расстоянию между толкателями 6б и 6в. Зоны 26а, 26б, 26в, 26г (на фиг. 6а) и зоны 26а, 26б, 26в, 26г, 26д и 26е (на фиг. 7а) могут быть как равной длины, так и различными. Максимальный размер зон 26а, 26б, 26в, 26г (на фиг. 6а) и зон 26а, 26б, 26в, 26г, 26д и 26е (на фиг. 7а) определяется длиной сторон многогранника. Каждая пара толкателей 6б и 6в содержит свой привод перемещения, обеспечивающий их синхронное сдвигание и раздвигание.
На фиг. 8а изображен вариант исполнения привода перемещения пары подвижных толкателей 6б и 6в, выполненный в виде двух зубчатых реек 22, 23, которые входят в зацепление с общей шестерней 24, установленной на двигателе 25. Толкатели 6б и 6в установлены на соответствующие зубчатые рейки 22 и 23, расстояние между толкателями 6б и бв (показано в виде размерной стрелки) образует длины зон 26. Посадочные платформы вариантов исполнения рис. 6а, 7а содержат по крайней мере три привода толкателей 6б и 6в, которые устанавливаются снаружи или внутри посадочной площадки 3.
На фиг. 8б изображен вариант исполнения привода перемещения работающей синхронно группы из двух пар подвижных толкателей 6б и 6в, выполненной виде двух зубчатых реек 22 и 23, которые входят в зацепление с общей шестерней 24, установленной на двигателе 25. Толкатели 6б и 6в установлены на соответствующие зубчатые рейки 22 и 23, расстояние между толкателями 6б и 6в (показаны в виде размерных стрелок) образует длины зон 26а и 26б, которые в данном случае равны между собой.
Количество пар смыкающихся толкателей 6б и 6в может быть различным и определяется количеством пар подвижных толкателей 6б и 6в, расположенных на одной грани. Такие привода могут применяться, например, в варианте исполнения посадочной платформы фиг. 2д, где синхронно приводятся в движение три пары смыкающихся подвижных толкателей 6б и 6в. Зубчатые рейки 22 и 23 могут быть выполнены в виде отрезков, дуги круга или полного круга. В этом случае данный привод применим для посадочной площадки 3 в виде рамки, наружный контур 4 которого представляет собой круг.
Возможны другие варианты конструкции привода смыкающихся толкателей 6б и 6в, обеспечивающих такой же алгоритм действия.
Снова вернемся к фиг. 6а, 7а. Посадочная платформа может содержать следующие датчики и маркеры для ориентации БПЛА 8 в процессе и после приземления и информирования системы управления.
Датчик расположения толкателей 6б и 6в на грани посадочной площадки 3. В данном исполнении функцию данного датчика выполняет встроенный в двигатель 25 абсолютный энкодер (не показан). Местоположение толкателей 6б и 6в и соответственно длины зон 26а, 26б, 26в (на фиг. 6а), 26а, 26б, 26в, 26г 26д (на фиг. 7а) пересчитываются по показаниям данного энкодера.
Датчик положения корпуса БПЛА 8 и угла расположения лучей 9 БПЛА 8 относительно посадочной площадки 3 в процессе или/и после приземления. На фиг. 6а, 7а датчик положения представлен в виде не менее одной видеокамеры 19, установленной на основании 1. Данный датчик позволяет определить положение лучей 9 на гранях многогранной рамки и отклонение БПЛА 8 от центра посадочной площадки 3. Показания данного датчика могут быть использованы для задания положения толкателей 6б и 6в и, соответственно, длины зон 26а, 26б, 26в (на фиг. 6а), 26а, 26б, 26в, 26г 26д (на фиг. 7а) в процессе приземления БПЛА 8.
Датчик приземления БПЛА 8 на посадочную площадку 3. На фиг. 6а, 7а датчик приземления выполнен в виде датчика веса 20, который установлен под каждую опору 2 посадочной площадки 3. Количество опор 2 (соответственно датчиков веса 20) должно быть не менее трех. Показания данного датчика позволяют установить факт приземления БПЛА 8 на посадочную площадку 3. Применение весовых датчиков 20 позволяет, кроме того, рассчитать точную координату приземления БПЛА 8 на посадочной площадке 3.
Графический (световой или иной) маркер 21 для ориентации БПЛА 8 при приземлении. Маркер 21 используется системой управления БПЛА 8 для ориентирования при приземлении на посадочную площадку 3.
Посадочная платформа может содержать другие виды датчиков для контроля параметров приземления БПЛА 8, погодных и других условии работы, взаимодействия посадочной платформы с БПЛА 8, работы элементов устройств позиционирования, фиксации БПЛА 8, выполнения работ по зарядке аккумуляторов, обмену информации, погрузки/разгрузки БПЛА 8 и т.п.
Система управления посадочной платформы содержит контроллерную систему сбора и обработки информации и управления, обеспечивающую контроль в процессе и после приземления БПЛА 8, управление приводами толкателей 6б и 6в, а также блок связи с принимаемым БПЛА 8 и устройство зарядки аккумулятора БПЛА 8 (не показаны).
На фиг 6б и 7б БПЛА 8 позиционированы в центре посадочной площадки и толкатели 6б и 6в произвели захват лучей 9 и зафиксировали БПЛА 8.
На фиг. 7в изображен вариант исполнения посадочной платформы, в котором посадочная площадка 3 выполнена в виде рамки с выпуклым наружным контуром 4, выполненным в виде многогранника (шестигранника) и содержит шесть толкателей 6 с позиционированным и закрепленным БПЛА 8. В отличие от вариантов исполнения фиг. 6а и 7а данная посадочная платформа содержит толкатели 6б и 6в только на трех сторонах многогранника. Такое количество толкателей 6б и бв достаточно для правильного позиционирования БПЛА 8 на посадочной площадке 3. Соответственно посадочная платформа содержит три привода перемещения толкателей 6б и 6в.
На фиг. 9а изображен вариант исполнения посадочной платформы с посадочной площадкой 3, выполненной в виде рамки с выпуклым наружным контуром, представляющим собой круг, и содержит восемь подвижных толкателей 6б с приземлившимся БПЛА 8 с четырьмя лучами 9.
На фиг. 9б изображена посадочная платформа фиг. 9а вид сверху.
Посадочная платформа фиг. 9а содержит основание 1, на котором на опорах 2 установлена посадочная площадка 3, выполненная в виде рамки с выпуклым наружным контуром, представляющим собой круг. На боковой поверхности посадочной площадки 3 установлен направляющий рельс 27, например, ромбовидного профиля, боковая поверхность которого выполнена в виде зубчатого колеса 28. Каждый подвижный толкатель 6б имеет индивидуальный привод 29, установленный на направляющий рельс 27. Толкатели 6б попарно раздвинуты друг от друга и образуют на посадочной площадке 3 секторы 18а, 18б, 18в, 18г с углами α1, α2, α3 и α4 (см. фиг. 9б), которые могут быть равными или различными.
На фиг. 9в изображен вариант исполнения индивидуального привода 29 подвижного толкателя 6.
Индивидуальный привод 29 содержит несущую плиту 30, на который установлен толкатель 6б, направляющие ролики 31, двигатель 32, на валу которого установлена шестерня 33. В зависимости от направления прижатия лучей 9 БПЛА 8 толкатель 6б может быть расположен с левого (изображено) или с правого (не изображено) края несущей плиты 30, т.е. зеркально. Поз. 35 обозначена сенсорная головка для определения местоположения толкателя 66 на посадочной площадке 3.
Индивидуальный привод 29 устанавливается на направляющий рельс 27 на направляющие ролики 31. Шестерня 33 при этом входит в зацепление с зубчатым колесом 28 (фиг. 9а).
Посадочная платформа фиг. 9а может содержать следующие датчики и маркеры для ориентации БПЛА 8 в процессе и после приземления и информировании системы управления.
Датчик расположения толкателей 6б и 6в на посадочной площадке 3. Функция данного датчика может быть представлена в виде магнитной, емкостной или индуктивной измерительной системы, состоящей из гибкой линейки 34 с магнитными, емкостными или индуктивными элементами, установленной на посадочной площадке 3 и сенсорной головки 35, которая установлена на каждом индивидуальном приводе 29 подвижного толкателя 6б.
Датчик положения корпуса БПЛА 8 и угла расположение лучей 9 БПЛА 8 относительно посадочной площадки 3 в процессе и после приземления. На фиг. 9а датчик положения представлен в виде не менее одной видеокамеры 19, установленной на основании 1. Данный датчик позволяет определить величину δ отклонение приземляемого БПЛА 8 от центра посадочной площадки 3 и угол β поворота лучей 9 относительно осей посадочной площадки 3 в процессе и после приземления. Показания данного датчика могут быть использованы для задания положения толкателей 6б и, соответственно, секторов 18а, 18б, 18в, 18г в процессе приземления БПЛА 8 на посадочную площадку 3.
Видеокамера 19 может также фиксировать местоположение толкателей 6б или двигателей 32 индивидуальных приводов 29 движения толкателей 6б и соответственно система управления может рассчитать местоположение толкателей 6б.
Благодаря такому датчику система управления посадочной платформы получает информацию о точном расположении каждого толкателя 6б и 6в в реальном времени в процессе приземления БПЛА 8, а также во время позиционирования и захвата лучей 9 БПЛА 8 после приземления.
Датчик приземления БПЛА 8 на посадочную площадку 3. На фиг. 9а датчик приземления выполнен в виде датчика веса 20, который установлен под каждую опору 2 посадочной площадки 3. Количество опор 2 (соответственно датчиков веса 20) должно быть не менее трех. Показания данного датчика позволяют установить факт приземления БПЛА 8 на посадочную площадку 3. Применение весовых датчиков 20 позволяет, кроме того, рассчитать точную координату приземления БПЛА 8 на посадочной площадке 3.
Графический (световой или иной) маркер 21 для ориентации БПЛА 8 при приземлении. Маркер 21 используется системой управления БПЛА 8 для ориентирования при приземлении на посадочную площадку 3.
Посадочная платформа может содержать другие виды датчиков для контроля параметров приземления БПЛА 8, погодных и других условии работы и взаимодействия посадочной платформы с БПЛА 8 и работы элементов устройств позиционирования, фиксирования БПЛА 8, выполнения работ по зарядке аккумуляторов, обмену информации, погрузки/разгрузки БПЛА 8 и т.п.
На фиг. 9г изображена посадочная платформа фиг. 9а с позиционированным и закрепленным БПЛА 8 с четырьмя лучами 9.
Применение индивидуального привода 29 для каждого подвижного толкатели 66 позволяет позиционировать БПЛА 8 с различным углом β поворота БПЛА 8 относительно осей посадочной площадки 3, а также разворачивать БПЛА 8 после позиционирования на требуемый угол. Это позволяет производить ускоренное позиционирование и захват лучей 9 для фиксации БПЛА 8 после приземления.
Индивидуальный привод 29 позволяет переформатировать посадочную платформу для приема БПЛА 8 с различным количеством лучей 9, настраивая каждый раз местоположение толкателей 66 под конфигурацию принимаемого БПЛА 8.
На фиг. 9д изображена посадочная платформа фиг. 9а с приземлившимся БПЛА 8 с шестью лучами 9.
На фиг. 9е изображена посадочная платформа фиг. 9д, вид сверху.
На фиг. 9ж изображена посадочная платформа фиг. 9а с позиционированным и закрепленным БПЛА 8 с шестью лучами 9.
Для приема БПЛА 8 с четырьмя лучами 9 подвижные толкатели 6б группировались вокруг образующих крест лучей 9 (фиг. 9б). Для приема БПЛА 8 с шестью лучами 9а, 9б, 9в, 9г, 9д и 9е (фиг. 9д) толкатели 6б сгруппированы на местах ожидаемого приземления лучей 9б, 9в, 9д и 9е, образуя сектора 18а, 18б, 18в, 18г и углы α1, α2, α3 и α4 (фиг. 9е) которые могут быть равными или различными.
Таким образом, посадочная платформа производит захват такого количества лучей 9, какое количество пар подвижных толкателей 6б имеется в данном варианте исполнения. Если посадочная платформа принимает БПЛА 8 с количеством лучей 9 меньшим, чем количество пар подвижных толкателей 6б, часть подвижных толкателей 6б не будут задействованы в захвате лучей 9 и позиционировании БПЛА 8.
На фиг. 9и изображен вариант исполнения посадочной платформа с посадочной площадкой, выполненной в виде рамки с выпуклым наружным контуром, представляющим собой круг и шестью подвижными толкателями с приземлившимся и закрепленным БПЛА 8 с шестью лучами 9. Посадочная платформа произвела захват лучей 9б, 9г и 9е, при этом лучи 9а, 9в и 9д остаются свободными. Это обеспечило позиционирование БПЛА 8 в центр посадочной площадки 3 и необходимый поворот его относительно посадочной площадки 3.
На фиг. 10а изображен вариант исполнения посадочной платформы с посадочной площадкой 3, выполненной в виде рамки с выпуклым наружным контуром, представляющим собой круг, и содержит восемь подвижных толкателей 6б в виде роликов с приземлившимся БПЛА с четырьмя лучами 9.
Данную посадочную платформу отличает от посадочной платформы фиг. 9а форма толкателей 6б, которые выполнены в виде направляющих роликов фиг. 4в, 4г. Такая форма толкателей 6б позволяет производить захват лучей 9 БПЛА 8 при пересечении ими рамки посадочной площадки 3 под углом, отличным от перпендикуляра. При этом в зависимости от угла пересечения каждого луча 9 рамки посадочной площадки 3 толкатели 66 в положении замыкания на лучах 9 находятся на различных расстояниях друг от друга. Это позволяет производить захват лучей 9 БПЛА 8 при любом положении на посадочной площадке 3 сразу после приземления БПЛА 8 без позиционирования его на посадочной площадке 3 и поворота относительно посадочной площадки 3.
На фиг. 10а, 10б, 10в на примере варианта посадочной платформы фиг. 10а изображена последовательность приземления БПЛА на посадочную площадку 3 (фиг. 10а), лучей 9 БПЛА 8 подвижными толкателями 6б без позиционирования БПЛА 8 относительно посадочной площадки 3 (фиг. 10б) и позиционирование зафиксированного БПЛА 8 в геометрическом центре посадочной площадки 3 (фиг. 10в). Данная посадочная платформа позволяет позиционировать БПЛА 8 в различных точках, в пределах перемещения корпуса БПЛА 8 внутри контура 5 рамки посадочной площадки 3. Также важно, что данная посадочная платформа может перемещать БПЛА 8 в пределах внутреннего контура 5 посадочной площадки 3 и удерживать его при этом в зафиксированном положении. Такое свойство данной посадочной платформы может быть использовано для перемещения или поворота зафиксированного БПЛА 8 при проведении работ по его обслуживанию. Т.е. посадочная платформа дает возможность контролируемого движения зафиксированного БПЛА 8 в двух координатах по плоскости посадочной площадки 3 и поворачивать вокруг вертикальной оси БПЛА 8.
На фиг. 10г, 10д, 10е показаны виды сверху фиг. 10а, 10б, 10в, демонстрирующих последовательность приземления, фиксирования и позиционирования БПЛА 8.
Представленные в данном описании механические детали и узлы могут быть заменены механическими, пневматическими, гидравлическими и подобными деталями и узлами, обеспечивающими аналогичный результат; датчики могут быть заменены на подобные датчики, работающие на других принципах, возможно определение местоположения элементов посадочной платформы как измерительными, так и вычислительными методами.
Посадочная платформа БПЛА работает следующим образом.
Подготовка посадочной платформы к приземлению БПЛА 8.
Вариант исполнения посадочной платформы фиг. 1а, 1б, 1в.
По команде системы управления (не показана) посадочной платформы приводы 7 перемещают подвижные толкатели 6б в крайнее положение, образуя между толкателями 6 зазор для приема лучей 9 при приземлении БПЛА 8. Причем в варианте исполнения фиг. 1а неподвижные толкатели 6а остаются на месте.
Посадочная платформа варианты исполнения фиг. 1а, 1б, 1в готова к приземлению на него БПЛА 8.
Вариант исполнения посадочной платформы фиг. 5а.
По команде системы управления (не показана) посадочной платформы двигатель 17 вращает установленную на его вал шестерню 16, которая в свою очередь вращает зубчатый сектор 15 с поворотным кольцом 14. Поворотное кольцо 14 вращается против часовой стрелки (вид сверху фиг. 5а, 5б), при этом толкатели 6б раздвигаются от толкателей 6а, образуя между собой на посадочной площадке 3 секторы 18а, 18б, 18в и 18г с равными углами α. Задаваемое значение угла α зависит от ожидаемого отклонения δ БПЛА 8 от центра посадочной площадки 3 и ожидаемого угла β поворота лучей 9 БПЛА 8 относительно осей посадочной площадки 3. Максимальное значение угла а ограничено касанием (тыльных сторон) толкателей 6а и 6б друг друга. Величина текущего значения угла а секторов 18а, 18б, 18в и 18г зависит от угла поворота поворотного кольца 14, которая контролируется датчиком (не показан) угла поворота поворотного кольца 14 или по показаниям встроенного в двигатель 17 энкодера (не показан).
По достижению требуемого угла поворота поворотного кольца 14 система управления (не показана) посадочной платформы останавливает двигатель 17. Посадочная платформа вариант исполнения фиг. 5а готова к приземлению на него БПЛА 8.
Вариант исполнения посадочной платформы фиг. 6а, 7а, 7б.
По команде системы управления (не показана) посадочной платформой двигатели 25 вращают установленные на валах шестерни 24, зубчатые рейки 22 и 23 с установленными на них толкателями 6б и 6в (фиг. 8а) приходят в движение. Между толкателями 6б и 6в появляется зоны 26а, 26б, 26в, 26г для посадочной площадки фиг. 6а и 26а, 26б, 26в, 26г, 26д, 26е для посадочной площадки фиг. 7а для приема лучей 9 при приземлении БПЛА 8. Длина зон 26а, 26б, 26в, 26г для посадочной площадки фиг. 6а и 26а, 26б, 26в, 26г, 26д, 26е для посадочной площадки фиг. 7а зависят от ожидаемого отклонения δ БПЛА 8 от центра посадочной площадки 3 и ожидаемого угла β поворота лучей 9 БПЛА 8 относительно осей посадочной площадки 3. Максимальная длина зон ограничена длиной стороны многогранника. Величина текущих значении длин зон 26а, 26б, 26в, 26г для посадочной площадки фиг. 6а и 26а, 26б, 26в, 26г, 26д, 26е для посадочной площадки фиг. 7а зависят от угла поворота шестерен 24, которые контролируются по показаниям встроенного в двигатель 25 энкодера (не показан).
По достижению требуемой длины зон 26а, 26б, 26в, 26г для посадочной площадки фиг. 6а и 26а, 26б, 26в, 26г, 26д, 26е для посадочной площадки фиг. 7а каждой пары толкателей 6б и 6в система управления (не показана) посадочной платформы останавливает соответствующий двигатель 25. После останова всех двигателей 25 посадочная платформа вариант исполнения фиг. 6а, 7а, 7б готова к приземлению на него БПЛА 8.
Вариант исполнения посадочной платформы фиг. 9а, 10а.
По команде системы управления (не показана) посадочной платформы двигатели 32 каждого индивидуального привода 29 подвижного толкателя 66 вращает шестерню 33, которая, взаимодействуя с зубчатым колесом 28, приводит в движение индивидуальный привод 29 с толкателем 6б. Направление движения толкателей 6б зависит от направления вращения двигателей 32. Каждая пара подвижных толкателей 6б размещается в зоне ожидаемого касания посадочной площадки 3 с соответствующим лучом 9 БПЛА 8 по разные стороны от ожидаемой точки касания на угол равный половине угла α и образуют соответствующие зоны для лучей 9 при приземлении БПЛА 3 на посадочную площадку 3 (фиг. 9б).
Для БПЛА 8 с четырьмя лучами 9 (фиг. 9б, 10а) ожидаемые углы расположения лучей 9 составляют 0°, 90°, 180° и 270°. Соответственно, толкатели 6б будут расположены для образования зоны 18а на углах (-α1/2) и (+α1/2); для образования зоны 18б на углах (90°-α2 /2) и (90°+α2/2); для образования зоны 18в на углах (180-α3/2) и (180+α3/2); для образования зоны 18г на углах (270°-α4/2) и (270°+α4/2).
Для БПЛА 8 с шестью лучами 9 на посадочной площадке 3 с двенадцатью подвижными толкателями 66 ожидаемые углы расположения лучей 9 составляют 0°, 60°, 120°, 180°, 240° и 300°. Соответственно, толкатели 6 будут расположены для образования зоны 18а на углах (-α1/2) и (+α1/2); для образования зоны 18б на углах (60°-α2 /2) и (60°+α2/2); для образования зоны 18в на углах (120°-α3/2) и (120°+α3/2); для образования зоны 18г на углах (180°-α4/2) и (180°+α4/2); для образования зоны 18д на углах (240°-α5/2) и (240°+α5/2); для образования зоны 18е на углах (300°-α6/2) и (300°+α6/2).
Для БПЛА 8 с шестью лучами 9 (фиг. 9е) на посадочной площадке с восемью подвижными толкателями 6б при ожидаемом захвате лучей 9б, 9в, 9д, 9е ожидаемые углы расположения лучей 9 составляют 60°, 120°, 240° и 300°. Соответственно, подвижные толкатели 6б будут расположены для образования зоны 18а на углах (60°-α1/2) и (60°+α1/2); для образования зоны 18б на углах (120°-α2/2) и (120°+α2/2); для образования зоны 18в на углах (240°-α3/2) и (240°+α3/2) и для образования зоны 18г на углах (300°-α4/2) и (300°+α4/2).
Углы α определяются из условий приземления БПЛА 8 (ветер, дождь, плохая видимость и т.п.) и могут быть как равными, так и различными. Ожидаемые углы расположения подвижных толкателей 6б могут отличаться от симметричного расположения относительно ожидаемой точки контакта луча 9 БПЛА 8 с посадочной площадкой 3, например, при ветре. Соответственно, ожидаемая несимметричность вносится в формулу расчета углов расположения подвижных толкателей 6б, в которых отношение α/2 изменяется на другую долю угла α для толкателей 6б, расположенных по разные стороны соответствующего луча 9 БПЛА 8.
Текущий угол расположения каждого подвижного толкателя 6б определяется сенсорной головкой 35, установленной на каждый индивидуальный привод 29 подвижных толкателей 6б, путем взаимодействия с гибкой линейкой 34 с магнитным, емкостным или индуктивными элементами. По достижению заданных для каждого подвижного толкателя 66 углов расположения на посадочной площадке 3, система управления останавливает соответствующий двигатель 32 каждого индивидуального привода 29. После остановки всех двигателей 32 посадочная платформа готова к приземлению БПЛА 8.
Приземление БПЛА 8 на посадочную платформу.
БПЛА 8 подлетает к посадочной платформе, ориентируясь по спутниковой навигации или показаниям собственной инерционной навигации. Далее производится определение точного места приземления БПЛА 8 и его приземление, например, ориентируясь по установленной на БПЛА 8 видеокамере по изображению посадочной площадки 3 и/или графического маркера, и/или источника излучения 21, установленного на основании 1 посадочной платформы. Точность приземления БПЛА 8 определяется методом определения точки приземления, динамическими характеристиками БПЛА 8, условиями освещенности, метеорологическими условиями приземления, особенно резким изменением скорости и направления ветра в момент приземления и видимостью. Приземление БПЛА 8 пройдет успешно, если каждый луч 9 БПЛА 8 коснется посадочной площадки 3 в зонах 18а, 18б и т.п. (фиг. 5а, 9а, 10а) или 26а, 26б и т.п. (фиг. 6а, 7а) для приземления БПЛА 8 на лучи 9.
Работа посадочной платформы при приземлении БПЛА 8.
В зависимости от варианта исполнения посадочной платформы, она может вести себя при посадке БПЛА 8 пассивно или активно.
При пассивном поведении посадочная платформа находится в состоянии готовности принять БПЛА 8 и не предпринимает никаких действий. Успешность и точность приземления БПЛА 8 полностью зависят от условия приземления, работы устройств БПЛА 8, отвечающих за определение точки приземления, системы управления и исполнительных устройств БПЛА 8.
При активном поведении посадочная платформа отслеживает приземляющийся БПЛА 8, определяет его отклонение от центра посадочной площадки 3, определяет углы β поворота лучей 9 БПЛА 8 относительно осей посадочной платформы и имеет возможность управления местоположением подвижных толкателей 6б, 6в на посадочной площадке 3, устанавливая местоположение и достаточные размеры зон 18а, 18б и т.п. (фиг. 5а, 9а, 10а) или 26а, 26б и т.п. (фиг. 6а, 7а, 7в) для приземления БПЛА 8 на лучи 9. Это позволяет повысить успешность приземления БПЛА 8 при минимальном размере зон 18а, 18б и т.п. (фиг. 5а, 9а, 10а) или 26а, 26б и т.п. (фиг. 6а, 7а, 7в) для приземления БПЛА 8 на лучи 9, что в свою очередь позволяет произвести ускоренное позиционирование и захват лучей 9 БПЛА 8 после приземления.
Вариант исполнения посадочной платформы фиг. 1а, 1б, 1в.
Данная посадочная платформа работает только в пассивном режиме и не производит никаких действии при приземлении БПЛА 8.
Вариант исполнения посадочной платформы фиг. 5а.
В посадочной платформе фиг. 5а толкатели 6а находятся на посадочной площадке 3 стационарно, толкатели 6б установлены на поворотное кольцо 14 и имеют возможность перемещаться при повороте поворотного кольца 14. Соответственно при перемещении толкателей 6б одновременно изменяются углы а всех зон 18a, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9, местоположение ожидаемых точек касания лучей 9 посадочной площадки 3 расположено на половине угла α. С изменением угла α изменяется и местоположение ожидаемых точек касания лучей 9 посадочной площадки 3. Лучи 9 БПЛА 8 при приземлении должны иметь угол поворота относительно толкателей 6, равный α/2.
В процессе приземления БПЛА 8 видеокамера 19 определяет фактическое отклонение БПЛА 8 и угол β поворота лучей 9 относительно посадочной площадки 3. Система управления посадочной платформы оценивает успешность попадания лучей 9 БПЛА 8 в зоны 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9. При необходимости по команде системы управления посадочной платформы производится перемещение толкателей 6б на увеличение или уменьшение угла α зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9. Это позволяет повысить успешность посадки БПЛА 8 при минимальном размере зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9, что в свою очередь позволяет произвести ускоренное позиционирование и захват лучей 9 (фиксацию) БПЛА 8 после приземления.
Вариант исполнения посадочной платформы фиг. 6а, 7а, 7б.
В посадочной платформе фиг. 6а, 7а, 7б каждая пара толкателей 6б и 6в установленные на одной грани многогранника посадочной площадки 3 двигаются синхронно на смыкание или на размыкание. При этом центры зон 26а, 26б, 26в, 26г для фиг. 6а и зон 26а, 26б, 26в, 26г, 26д, 26е для фиг. 7а для приземления БПЛА 8 на лучи 9 на поверхности посадочной площадки 3, как правило, находится в центре грани многогранника. Соответственно система управления (не показана) производит приземление БПЛА 8 на посадочную площадку 3, ориентируя лучи 9 на центры граней многогранника.
В процессе приземления БПЛА 8 видеокамера 19 в реальном времени определяет фактическое отклонение БПЛА 8 и угол 0 поворота лучей 9 относительно посадочной площадки 3. Система управления посадочной платформы оценивает успешность попадания лучей 9 БПЛА 8 в зоны 26а, 26б, 26в, 26г для фиг. 6а и зон 26а, 26б, 26в, 26г, 26д, 26е для фиг. 7а для приземления БПЛА 8 на лучи 9. При необходимости по команде системы управления посадочной платформы производится перемещение толкателей 6б и 6в на увеличение или уменьшение зон 26а, 26б, 26в, 26г для фиг. 6а и зон 26а, 26б, 26в, 26г, 26д, 26е для фиг. 7а для приземления БПЛА 8 на лучи 9. Это позволяет повысить успешность посадки БПЛА 8 при минимальном размере зон 26а, 26б, 26в, 26г для фиг. 6а и зон 26а, 26б, 26в, 26г, 26д, 26е для фиг. 7а для приземления БПЛА 8 на лучи 9, что в свою очередь позволяет произвести ускоренное позиционирование и захват лучей 9 (фиксация) БПЛА 8 после приземления.
Вариант исполнения посадочной платформы фиг. 9а, 10а.
В посадочной платформе фиг. 9а, 10а каждый подвижный толкатель 6б имеет индивидуальный привод 29 перемещения толкателей 6б. Это позволяет устанавливать для каждого луча 9 приземляющегося БПЛА 8 местоположение и индивидуальные размеры зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9. Причем, расположение зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9 может быть как симметричным, так и несимметричным к ожидаемой точке касания каждого луча 9 БПЛА 8. Такая гибкость поведения подвижных толкателей 6б на посадочной площадке 3 при приземлении БПЛА 8 позволяет выполнить успешное приземление при сложных условиях посадки с неограниченным поворотом лучей 9 БПЛА 8 относительно осей посадочной платформы. Попадание корпуса БПЛА 8 во внутрь контура 5 посадочной площадки 3 является достаточным условием успешного приземления.
Исходя из условия окружающей среды (ветер, видимость, осадки и т.п.) на момент приземления уточняются углы а каждой из зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9, симметричность их расположения относительно ожидаемой точки касания каждого луча 9 на посадочной площадке 3.
В процессе приземления БПЛА 8 видеокамера 19 в реальном времени определяет фактическое отклонение БПЛА 8 и угол β поворота лучей 9 относительно посадочной площадки 3. Система управления посадочной платформы оценивает успешность попадания лучей 9 БПЛА 8 в зоны 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9. При изменении ожидаемого угла 0 поворота лучей 9 БРЛА 8, увеличение или уменьшение каждого угла α зон 18a, 18б, 18в, 18г, а также требуемой симметричности или несимметричности расположения подвижных толкателей 6б относительно ожидаемой точки касания лучей 9 посадочной площадки 3. Система управления (не показана) посадочной платформой перемещает индивидуально каждый толкатель 6б на требуемое место. Данные величины корректируются в реальном времени в зависимости от поведения БПЛА 8 до самого приземления на посадочную площадку 3. Чем ближе находится БПЛА 8 к посадочной площадке, тем точнее возможно определение требуемых величин зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9, тем меньше ожидаемое отклонение от требуемой точки посадки БПЛА 8 и тем меньше величина зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9. Это позволяет повысить успешность приземления БПЛА 8 при минимальном размере зон 18а, 18б, 18в, 18г для приземления БПЛА 8 на лучи 9, что в свою очередь позволяет произвести ускоренное позиционирование и захват лучей 9 (фиксацию) БПЛА 8 после приземления.
Факт приземления БПЛА 8 на посадочную площадку 3 фиксируется датчиком приземления, представленным в виде датчиков веса 20, которые установлены под каждую опору 2 посадочной площадки 3. Количество опор 2 (соответственно датчиков веса 20) должно быть не менее трех. Система управления посадочной платформой принимает сигнал с датчиков веса 20, устанавливает факт приземления БПЛА 8 и переходит к этапу позиционирования и захвата лучей 9 (фиксацию) БПЛА 8.
Захват лучей 9 (фиксацию) и позиционирование БПЛА 8 после приземления.
Вариант исполнения посадочной платформы фиг. 1а, 1б, 1в.
По команде системы управление посадочной платформой приводы 7 перемещения подвижных толкателей 6б толкают их к неподвижным толкателям 6а до замыкания на соответствующих лучах 9 БПЛА 8 (фиг. 1а), приводы 7 перемещения подвижных толкателей 6б перемещают навстречу друг другу до замыкания на соответствующем луче 9 БПЛА 8 (фиг. 1б, 1в). При контакте с лучами 9 подвижные толкатели 6б толкают впереди себя, а неподвижные толкатели 6а удерживают соответствующие лучи 9. Взаимодействие лучей 9 с неподвижными 6а и подвижными 6б толкателями приводит к повороту лучей 9 вместе с корпусом БПЛА 8 и одновременному движению БПЛА 8 к точке позиционирования.
Вариант исполнения посадочной платформы фиг. 5а.
По команде системы управления посадочной платформой двигатель 17 вращает установленную на его вал шестерню 16, которая в свою очередь вращает зубчатый сектор 15 с поворотным кольцом 14. Поворотное кольцо 14 вращается против часовой стрелке (вид сверху), при этом подвижные толкатели 6б сдвигаются к неподвижным толкателям 6а уменьшая секторы 18а, 18б, 18в, 18г. При контакте с лучами 9 подвижные толкатели 6б толкают впереди себя, а неподвижные толкатели 6а удерживают соответствующие лучи 9. Взаимодействие лучей 9 с неподвижными 6а и подвижными 6б толкателями приводит к повороту лучей 9 вместе с корпусом БПЛА 8 и одновременному движению БПЛА 8 к точке позиционирования, которая расположена в центре посадочной площадки 3. Величина текущего значения угла а секторов 18а, 18б, 18в, 18г контролируется по углу поворота поворотного кольца 14, которая контролируется датчиком угла поворота (не показано) поворотного кольца 14 или по показаниям встроенного в двигатель 17 энкодера (не показано). По завершению поворота поворотного кольца 14 БПЛА 8 позиционируется и фиксируется в центре посадочной площадки 3, лучи 9 ориентируются по осям посадочной платформы.
По достижению требуемого угла поворота поворотного кольца 14 система управления останавливает двигатель 17 (фиг. 5в, 5г). БПЛА 8 позиционирован и закреплен на посадочной площадке 3. Электрические контакты 12, расположенные на неподвижных 6а и подвижных 6б контактах соединены с электрическими контактами 13, которые расположены на лучах 9 БПЛА 8.
Вариант исполнения посадочной платформы фиг. 6а, 7а, 7в.
По команде системы управление посадочной платформой двигатель 25 каждого привода толкателей 6б и 6в вращает установленную на его вал шестерню 24, которая приводит к сдвижению зубчатых реек 22 и 23 с установленными на них толкателями 6б и 6в. Зоны 26а, 26б, 26в, 26г для варианта исполнения фиг. 6а, 26а, 26б, 26в, 26г, 26д, 26е для варианта исполнения фиг. 7а для приземления БПЛА 8 на лучи 9 между толкателями 6б и 6в уменьшается. Взаимодействие лучей 9 с толкателями 6б и 6в приводит к повороту лучей 9 вместе с корпусом БПЛА 8 и одновременному движению центра корпуса БПЛА 8 к точке позиционирования. Величина текущих значений длин зон 26а, 26б, 26в, 26г для варианта исполнения фиг. 6а и 26а, 26б, 26в, 26г, 26д, 26е для варианта исполнения фиг. 7а зависит от угла поворота шестерни 24, которая контролируется по показаниям встроенного в двигатель 25 энкодера (не показано). По замыканию каждой пары толкателей 6б и 6в на соответствующие лучи 9 БПЛА 8 позиционируется и фиксируется в точке позиционирования, лучи 9 ориентируются по осям посадочной платформы. Электрические контакты 12, расположенные на неподвижных 6а и подвижных 6б контактах соединены с электрическими контактами 13, которые расположены на лучах 9 БПЛА 8.
По замыканию каждой пары толкателей 6б и 6в на соответствующие лучи 9 принимаемого БПЛА 8 система управления останавливает соответствующий двигатель 25 (фиг. 6а, 7а, 7в).
Вариант исполнения посадочной платформы фиг. 9а.
По команде системы управление посадочной платформой двигатели 32 каждого индивидуального привода 29 подвижного толкателя 6б вращает шестерню 33, которая взаимодействуя с зубчатым колесом 28, приводит в движение индивидуальный привод 29 с подвижным толкателем 6б. Направление движения подвижного толкателя 66 зависит от направления вращения двигателя 32. Скорости и направления движения каждого неподвижного толкателя 6б независимы друг от друга. Каждый подвижный толкатель 6б движется к заданной исходной точке с заданной для него скоростью. Взаимодействие лучей 9 с подвижными толкателями 6б приводит к повороту лучей 9 вместе с корпусом БПЛА 8 и одновременному движению БПЛА 8 к центру посадочной площадки 3. Программа движения подвижных толкателей 66 рассчитывается системой управления (не показан) посадочной платформы, исходя из условий обеспечения одновременного прихода всех толкателей 66 на свои места.
Текущий угол расположения каждого подвижного толкателя 6б определяется сенсорной головкой 35, установленной на каждый индивидуальный привод 29 подвижного толкателя 6б, путем взаимодействия с гибкой линейкой 34 с магнитным, емкостным или индуктивными элементами. По достижению заданных для каждого подвижного толкателя 6б угла расположения на посадочной площадке 3, система управления останавливает соответствующий двигатель 32 каждого индивидуального привода 29 подвижного толкателя 6б. Когда все подвижные толкатели 6б окажутся на своих исходных точках, будет завершено позиционирование и выполнен захват всех лучей 9 БПЛА 8. Позиционирование и захват лучей 9 (фиксация) БПЛА 8 завершается с остановкой последнего подвижного толкателя 6б. (фиг. 9г, 9ж, 9и)
Электрические контакты 12, расположенные на подвижных 6б толкателях соединены с электрическими контактами 13, которые расположены на лучах 9 БПЛА 8.
Таким образом варианты исполнения посадочной платформы согласно фиг 5а, 6а, 6б, 7а, 7б, 7в и 9а производят последовательное позиционирование и захват лучей 9 (фиксацию) БПЛА 8 на посадочной площадке 3. Благодаря тому, что в период приземления БПЛА 8 неподвижные 6а и подвижные 6б толкатели посадочной платформы раздвинуты на минимально требуемые величины и задание каждому толкателю 6б индивидуальной скорости перемещения, процесс позиционирования и захвата лучей 9 (фиксация) БПЛА 8 при посадке происходит за минимальный отрезок времени.
Вариант исполнения посадочной платформы фиг. 10а.
Вариант исполнения посадочной платформы фиг. 10а отличается от посадочной платформы фиг. 9а формой подвижных толкателей 6б, которые выполнены в виде направляющих роликов фиг. 4в, 4г. Такая форма подвижных толкателей 6б позволяет производить захват лучей 9 БПЛА 8 при любом положении на посадочной площадке 3 без позиционирования и поворота относительно посадочной площадки 3. Это позволяет зафиксировать БПЛА 8 сразу после приземления без предварительного разворота и перемещения, а затем производить необходимые последующие разворот и позиционирование.
На момент приземления система управления посадочной платформой имеет данные о местоположении каждого луча 9 на посадочной площадке 3. По команде системы управления посадочной платформой двигатель 32 каждого индивидуального привода 29 подвижного толкателя 66 вращает шестерню 33, которая взаимодействуя с зубчатым колесом 28, приводит в движение индивидуальный привод 29 с подвижным толкателем 6б. Каждый подвижный толкатель 6б движется в сторону местоположения захватываемого луча 9. Каждый из подвижных толкателей 66 в паре должны двигаться с такой скоростью, чтобы они замкнули соответствующие лучи 9 одновременно. Скорости всех подвижных толкателей 6б назначаются такими, чтобы все пары подвижных толкателей 6б замкнули соответствующие лучи 9 одновременно. Учитывая, что в этом случае подвижные толкатели 66 подходят к лучу 9 БПЛА 8 не перпендикулярно его оси, расстояние между ними на момент замыкания на луче 9 будет различным. Захват лучей 9 (фиксация) БПЛА завершается с замыканием всех пар подвижных толкателей 6 на соответствующих лучах 9 (фиг. 10б, 10д). В таком положении БПЛА 8 зафиксировано и не может самопроизвольно смещаться относительно посадочной площадки 3 или подпрыгнуть от вибрации или порыва ветра.
После проведения захвата лучей 9 (фиксации БПЛА 8) все подвижные толкатели 6б одновременно и синхронно движутся на свои исходные точки, находясь в которых они позиционируют БПЛА 8. Расстояние между замыкающими соответствующий луч 9 подвижными толкателями 6б поддерживается в зависимости от угла между осью соответствующего луча 9 и линей, соединяющей оси подвижных толкателей 6б.
Текущий угол расположения каждого подвижного толкателя 6б определяется сенсорной головкой 35, установленной на каждый индивидуальный привод 29 подвижных толкателей 6б путем взаимодействия с гибкой линейкой 34 с магнитным, емкостным или индуктивными элементами. По достижению заданных для каждого подвижного толкателя 6 углов расположения на посадочной площадке 3 система управления останавливает соответствующий двигатель 32 каждого индивидуального привода 29. Когда все подвижные толкатели 6б окажутся на своих исходных точках будет завершено позиционирование БПЛА 8 (фиг. 10в, 10е).
Такая последовательность выполнения захвата лучей 9 (фиксации БПЛА 8) и позиционирования БПЛА 8 позволяет производить захват лучей 9 БПЛА 8 за минимальное время до позиционирования его на посадочной площадке 3. Это особенно актуально для приземления БПЛА 8 на движущуюся посадочную платформу 3.
В отличие от посадочных платформ фиг. 1а, 1б, 1в, 5а, 6а, 6б, 7а, 7б, 7в и 9а посадочная платформа БПЛА вариант исполнения 10а может позиционировать БПЛА 8 в различных точках в пределах перемещения корпуса БПЛА 8 внутри контура 5 рамки посадочной площадки 3, а также производить необходимые перемещения и поворачивать вокруг вертикальной оси захваченный БПЛА 8 для лучшего взаимодействия с устройствами посадочной платформы при обслуживании между полетами.
Нахождение БПЛА 8 на посадочной платформе.
После захвата лучей 9 (фиксации БПЛА) и позиционирования на посадочной платформе БПЛА 8 установлен точно относительно устройств обслуживания, которые могут быть на посадочной платформе (манипуляторы для погрузки-разгрузки, устройства для замены аккумуляторов, разъемы или электрические разъемы и т.п.). Контакты 12, установленные на неподвижных 6а и подвижных 6б толкателях соединены с контактами 13, установленными на лучах 9 БПЛА 8.
В случае применения неподвижных 6а и подвижных 6б толкателей в виде ложементов, охватывающих лучи 9 (фиг. 4а), ложементов V-образной формы (фиг. 4б), ложементов в виде вращающихся или не вращающихся роликов различной формы (фиг. 4в, 4г) лучи 9 БПЛА 8 надежно фиксируют БПЛА 8 на посадочной площадке 3 от смещении, что дает возможность производить все работы по обслуживанию БПЛА 8 при движущейся посадочной платформе.
Посадочная платформа вариант исполнения фиг. 10а может перемещать БПЛА 8 в пределах внутреннего контура 5 посадочной площадки 3 и удерживать его при этом в захваченном положении. Это свойство может быть использовано для перемещения БПЛА 8 по двум координатам по плоскости посадочной площадки 3 и поворачивать его вокруг вертикальной оси при проведении работ по его обслуживанию.
Взлет БПЛА 8.
Для взлета БПЛА 8 с посадочной площадки 3 толкатели 6 должны освободить лучи 9 БПЛА 8 и отойти от них на расстояние, которое позволит БПЛА 8 взлететь с посадочной площадки 3 без риска зацепиться лучами 9 за толкатели 6.
Таким образом предложенные технические решения позволяют создать быстродействующую посадочную платформу для БПЛА вертикального взлета и посадки с надежным удержанием БПЛА, пригодную как для стационарных установок, так и для оснащения подвижных объектов.
Создать универсальную посадочную платформу для различных конфигураций принимаемых БПЛА.
Обеспечить точное позиционирование БПЛА на посадочной площадке.
Обеспечить необходимые перемещения БПЛА в процессе обслуживания.
Упростить конструкцию посадочной платформы и БПЛА вертикального взлета и посадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Посадочная площадка для многовинтового БПЛА вертикального взлета и посадки (Варианты) | 2021 |
|
RU2770506C1 |
| Устройство позиционирования БПЛА вертикального взлета и посадки с гибким толкателем (варианты) | 2022 |
|
RU2788099C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Способ приземления БПЛА на посадочную платформу | 2020 |
|
RU2739636C1 |
| Способ приземления многовинтового БПЛА вертикального взлета и посадки и устройства для его реализации | 2021 |
|
RU2780255C1 |
| Посадочная платформа для БПЛА вертикального взлета и посадки | 2019 |
|
RU2722249C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Ветряный двигатель с вертикальною осью и защитным кожухом | 1917 |
|
SU2288A1 |
| Посадочная платформа для беспилотного летательного аппарата | 2019 |
|
RU2710887C1 |
Группа изобретений относится к двум вариантам посадочной платформы для БПЛА вертикального взлета и посадки. Посадочная платформа содержит посадочную площадку, выполненную в виде рамки, устройство позиционирования и фиксации БПЛА на посадочной площадке, содержащее выступающие над посадочной площадкой неподвижные и подвижные толкатели. Посадочная платформа по второму варианту отличается вышеуказанной тем, что устройство позиционирования и фиксации содержит выступающие над посадочной площадкой только подвижные толкатели. Обеспечивается повышение точности позиционирования и надежная фиксация БПЛА различных конфигураций на посадочной площадке. 2 н. и 19 з.п. ф-лы, 40 ил.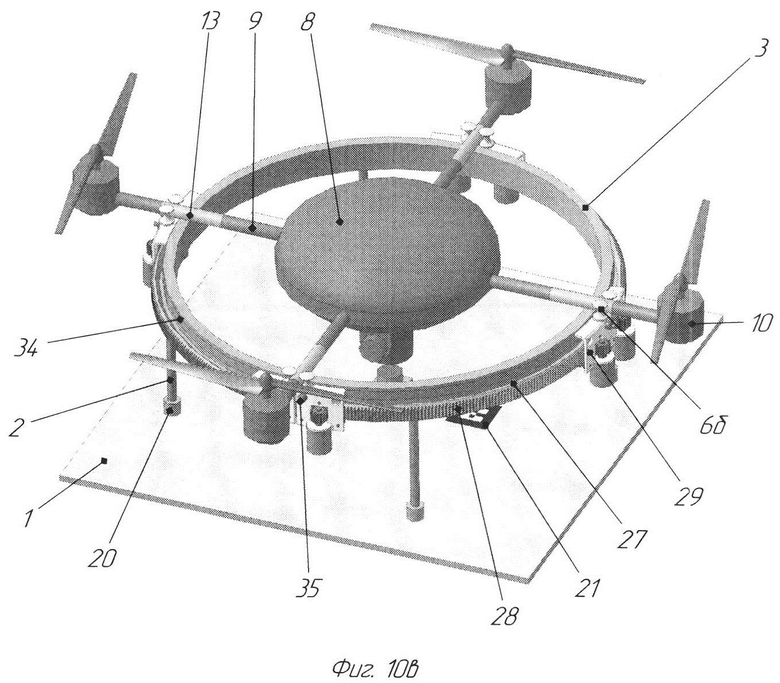
1. Посадочная платформа для БПЛА вертикального взлета и посадки, содержащая посадочную площадку, устройство позиционирования и фиксации БПЛА на посадочной площадке, отличающаяся тем, что посадочная площадка выполнена в виде рамки, а устройство позиционирования и фиксации содержит выступающие над посадочной площадкой неподвижные и подвижные толкатели.
2. Посадочная платформа для БПЛА вертикального взлета и посадки, содержащая посадочную площадку, устройство позиционирования и фиксации БПЛА на посадочной площадке, отличающаяся тем, что посадочная площадка выполнена в виде рамки, а устройство позиционирования и фиксации содержит выступающие над посадочной площадкой подвижные толкатели.
3. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что посадочная площадка выполнена в виде рамки с наружным контуром в виде круга.
4. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что посадочная площадка выполнена в виде рамки с наружным контуром в виде выпуклого многоугольника.
5. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что посадочная площадка выполнена в виде рамки с выпуклым наружным контуром из сопряженных друг с другом отрезков и дуг.
6. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что посадочная площадка выполнена в виде рамки, при этом наружный и внутренние контуры рамки эквидистантны.
7. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что подвижные толкатели перемещаются вдоль наружного контура рамки посадочной площадки.
8. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что подвижные толкатели перемещаются вдоль внутреннего контура рамки посадочной площадки.
9. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что подвижные и неподвижные толкатели выполнены в виде вертикальных стоек.
10. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что подвижные и неподвижные толкатели выполнены в виде ложементов, охватывающих лучи принимаемого БПЛА.
11. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что подвижные и неподвижные толкатели выполнены в виде направляющих роликов, охватывающих лучи принимаемого БПЛА.
12. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что содержит не менее шести неподвижных и подвижных толкателей.
13. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что количество неподвижных толкателей не превышает количества подвижных толкателей.
14. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что содержит не менее шести подвижных толкателей.
15. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что общее количество толкателей не превышает двукратного количества лучей принимаемого БПЛА с наибольшим количеством лучей.
16. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что привод перемещения подвижных толкателей содержит соединенные с приводом вращения не менее одного поворотного кольца, на каждом из которых установлены перемещаемые совместно в одном направлении подвижные толкатели.
17. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что привод перемещения пары подвижных толкателей выполнен в виде двух зубчатых реек, которые входят в зацепление с общей шестерней, соединенной с двигателем.
18. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что привод перемещения работающих синхронно групп пар подвижных толкателей выполнен в виде двух зубчатых реек, которые входят в зацепление с общей шестерней, соединенной с двигателем.
19. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что каждый подвижный толкатель имеет индивидуальный привод перемещения.
20. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1, отличающаяся тем, что по крайней мере часть подвижных толкателей и неподвижных толкателей содержат электрические контакты.
21. Посадочная платформа для БПЛА вертикального взлета и посадки по п. 1 или 2, отличающаяся тем, что содержит датчик для определения положения и угла расположения лучей БПЛА относительно посадочной площадки в процессе и после приземления БПЛА на посадочную площадку.
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| МАШИНА ДЛЯ ВАЛКИ И ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU197345A1 |
| CN 104973263 A, 14.10.2015 | |||
| 0 |
|
SU194136A1 | |
| WO 2019151947 A1, 08.08.2019. | |||

