Область техники, к которой относится изобретение
Изобретение в целом относится к хирургическим роботам, в частности к робототехническим комплексам, применяемым при проведении лапароскопических операций.
Уровень техники
Малоинвазивная хирургия достаточно распространена на сегодняшний день и представлена большим количеством технических решений, среди которых выделяются лапароскопические инструменты как наиболее распространенные. Комбинирование существующих инструментов с робототехническими средствами открывает новые возможности их применения и позволяет осуществлять работу в автоматизированном режиме.
В настоящее время известны хирургические роботы, такие как робот-хирург Da Vinci от компании Institute Surgical, Inc., состоящий из комплекса с определенным количеством манипуляторов, к которым подсоединяются различные инструменты и станции управления. Управление осуществляется дистанционно с помощью специальных органов управления на пульте врача-хируга. Как следует из описания, данный робот является универсальным хирургическим роботом и может применяться для решения широкого круга задач, при этом использует инструменты, которые специально разработаны для него.
Робот MiroSurge от германского центра авиации и космонавтики выполнен в виде трех манипуляторов MIRO, устанавливаемых на хирургический стол. Управление манипуляторами осуществляется с помощью специальных органов управления тактильного типа с консоли управления. Манипуляторы исполнены с возможностью измерения силы взаимодействия с тканью пациента благодаря встроенным миниатюрным датчикам момента силы. Полученные данные от датчиков передаются хирургу в виде силовой обратной связи на тактильных устройствах ввода. При работе данный робот использует специальные инструменты.
Документ RU 2 657 958 С2 раскрывает роботизированную хирургическую станцию с достаточно большой областью применения. Система представляет собой управляемую станцию с дистанционным пультом управления. Отличительной особенностью системы является кольцеобразная структура, которая позволяет позиционировать инструменты относительно пациента в необходимом положении при проведении операций.
Документ RU 2 651 886 С2 раскрывает роботизированную систему для позиционирования хирургического инструмента, которая требует незначительного монтажного пространства и позволяют перекладывать пациента во время операции без ограничения свободы передвижений хирургического инструмента после перекладывания. Система представляет собой управляющее устройство и несущую конструкцию, на которой расположено определенное количество механических рук с активным позиционирующим устройством.
В RU 2 644 281 С2 приведено описание специального хирургического инструмента для минимально-инвазивного воздействия и роботизированной системы, управляющей описываемым инструментом. Особенностью конструкции является ее относительно малые размеры, что дает возможность экономить рабочее пространство операционной и, в некоторых случаях, применять несколько инструментов одновременно.
Группа изобретений RU 2 642 947 С2 описывает хирургическую систему со сменными концевыми инструментами. Описываемая система решает задачи, аналогичные приведенным выше, и обладает оригинальной конструкцией с возможностью крепления различных рабочих инструментов в зависимости от решаемой задачи. Дополнительные узлы для данной системы с шарнирно поворачиваемыми рабочими органами описаны в RU 2 639 998 С2.
Устройство, описанное в RU 2 518 806 С2, предназначено для проведения хирургических операций с минимально-инвазивным вмешательством. Это устройство представляет собой робот-манипулятор с лапараскопическим инструментом. Отличительной особенностью является система измерения усилий, прилагаемых к пациенту не только на кончике инструмента, но и на уровне отверстия доступа в тело пациента. Изобретение входит в группу изобретений RU 2 462 342 С2.
По совокупности признаков наиболее близким аналогом является модель по RU 185 415 U1 для удержания и позиционирования лапароскопического инструмента, поскольку описывает устройство со схожими задачами. Конструкция представляет собой многозвенного робота, обеспечивающего пять степеней свободы для инструмента. Отличительной особенностью конструкции являются электромагнитные тормозные устройства, позволяющие фиксировать сопряженные звенья между собой и наличие специального инструмента, с которым может работать система.
Описанные выше аналоги требуют специализированные инструменты, с которыми работают. Разработанные инструменты не предполагают ручного применения и по сути являются неотъемлемой частью разработанных комплексов. В большинстве случаев проблема подвижности пациента не рассматривается как задача, предполагая его неподвижность. Данное предположение ошибочно для случаев проведения урологических операций с анестезией, оставляющей пациента в сознании и не исключающей движения пациента во время операции. В аналогах, где движения пациента возможны, используется сложная система позиционирования и удержания инструмента с активной системой управления. Рассмотренные аналоги не предполагают систем пассивной безопасности пациента, позволяющих совершать непроизвольные движение без ущерба для рабочего инструмента и здоровья пациента.
Раскрытие сущности изобретения
Настоящее изобретение относится к роботизированным хирургическим системам для удержания и позиционирования хирургических инструментов. Изобретение содержит робота, осуществляющего перемещение в пространстве специального держателя для инструмента. В качестве инструмента используются существующие ручные хирургические инструменты резектоскопы, одной из областей применения которых является проведение операций в урологии. С использованием роботизированной системы производится позиционирование рабочей части инструмента в теле пациента в заданном положении с целью выполнения операций.
В данной роботизированной системе основные приводные двигатели, отвечающие за перемещение инструмента, располагаются вдоль основных осей, имеющих точку пересечения в области входного отверстия, через которое инструмент проникает в пациента.
Конструкция условно делится на две части: позиционирующую инструмент и обеспечивающую движения рабочих органов инструмента. Хирургический инструмент устанавливается в специальный узел, обеспечивающий рабочие перемещения инструмента. Узел имитирует движения пальцев рук хирурга и содержит крепления, позволяющие присоединять и отсоединять инструмент во время операции.
Важной конструктивной особенностью предложенного решения является наличие узлов свободного вращения, обеспечивающих подвижность инструмента вместе с механизмом крепления. Это обеспечивает подвижность пациента и исключает его травмирование при смещении относительно положения, в котором оси вращения основных двигателей совпадают со входным отверстием инструмента в теле пациента. При движении пациента происходит изменение углов поворота крепления узла в который устанавливается инструмент. Наличие ненулевых углов поворота означает, что пациент смещен относительно пересечения осей вращения двигателей и требуется коррекция.
Краткое описание чертежей
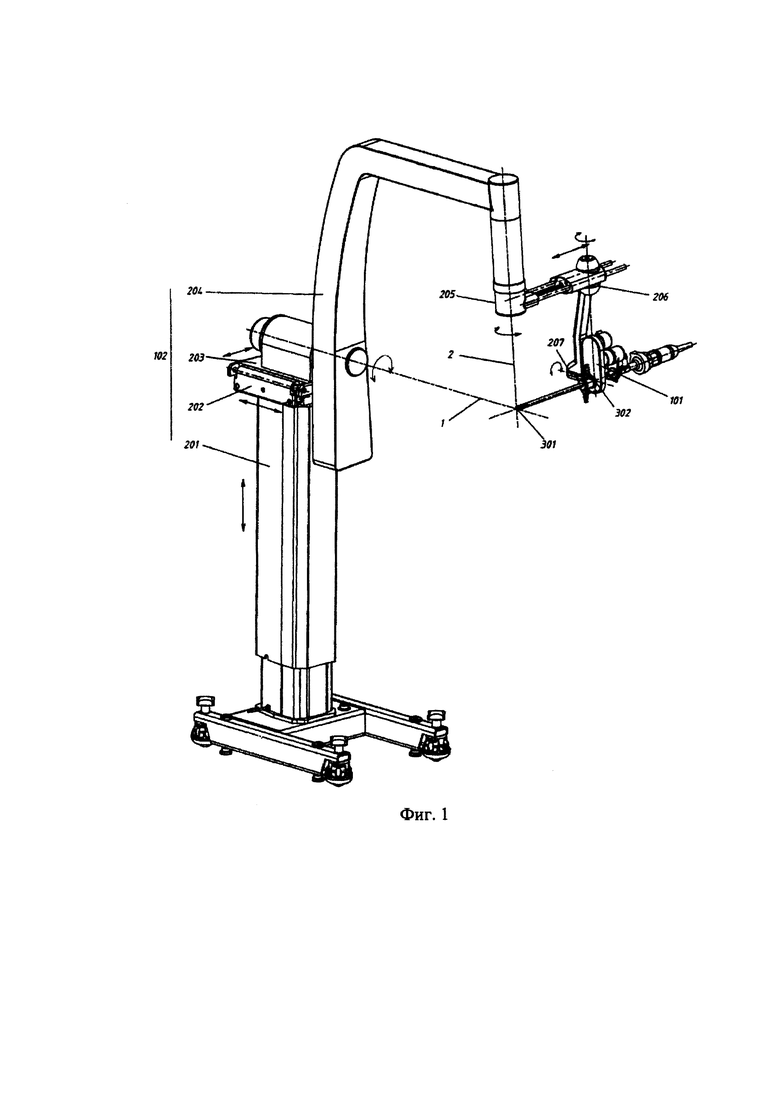
На фиг.1 показан вид в перспективе варианта осуществления изобретения роботизированной системы для удержания и позиционирования хирургического инструмента во время проведения лапароскопических операций, в соответствии с настоящим изобретением.
Осуществление изобретения
Роботизированная система согласно текущему изобретению содержит конструкцию 102 с возможностью крепления к ней узла 101. В совокупности конструкция 102 с узлом 101 предназначена для удержания и перемещения хирургического инструмента во время операции.
Как показано на фиг.1 конструкция 102 перемещает рабочий инструмент путем перемещения присоединенного узла 101, который в свою очередь осуществляет удержание рабочего инструмента. Конструкция 102 обеспечивает вращательное движение рабочего инструмента относительно осей 1 и 2 и поступательное относительно оси, проходящей через точки 301 и точку входа инструмента в тело пациента. Указанный набор движений обеспечивает необходимое позиционирование инструмента в теле пациента и реализуется приводами, вращающими звенья 204 и 205. Звено 205 оборудовано механизмом, перемещающим узел 101 относительно оси, проходящей через точки 301 и точку входа инструмента в тело пациента.
Узел 101, изображенный на фиг.1, необходим для удержания хирургического инструмента с возможностью управляемого перемещения рабочей части инструмента вдоль его продольной оси с возможностью вращения. Продольная ось, вдоль которой производится перемещение рабочей части инструмента, изображена на фиг.1, проходящей через точки 301 и 302.
Конструкция 102 обеспечивает корректное перемещение рабочего инструмента при условии совпадения точек пересечения осей 1 и 2 и точки входа в тело пациента. Для обеспечения возможности совмещения указанных точек, конструкция 102 оборудована механизмом продольного перемещения в трех координатах. Механизм продольного перемещения реализован звеньями 201, 202, 203 конструкции 102. Каждое из звеньев обеспечивает перемещение вдоль одной из взаимно перпендикулярных осей.
В соответствии с вариантом осуществления изобретения крепление узла 101 к конструкции 102 осуществляется с помощью шарнирных соединений 206 и 207, оси вращения которых, взаимно перпендикулярны и пересекаются в точке 302. Шарнирные соединения 206 и 207 обеспечивают подвижность узла 101 с закрепленным инструментом в случае движения пациента во время операции, что исключает повреждение пациента инструментом и увеличивает безопасность проводимых операций. Несовпадение точки пересечения осей 1 и 2 с точкой входа в тело пациента приводит изменению угла поворота шарнирных соединений 206 и 207. Данная ситуация возможна при начальном позиционировании инструмента в начале операции и в случае нежелательного движения пациента. В обоих случаях компенсация несовпадения точек пересечения осей 1 и 2 с точкой входа в тело пациента осуществляется механизмом продольного перемещения, реализованного звеньями 201, 202, 203.
Приведенное выше описание является только иллюстративным, и не должно рассматриваться как ограничение объема настоящего изобретения, которое определяется исключительно прилагаемыми пунктами формулы изобретения и их эквивалентами. Различные изменения и модификации раскрываемых вариантов осуществления изобретения будут очевидны для специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| УСТРОЙСТВО УДЕРЖАНИЯ ИНСТРУМЕНТОВ ДЛЯ МАНИПУЛЯТОРА РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2017 |
|
RU2745880C2 |
| ПУЛЬТ УПРАВЛЕНИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2760619C2 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| АКТИВНОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА И СОДЕРЖАЩАЯ ЕГО ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2013 |
|
RU2651886C2 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
Изобретение относится к медицине, а именно к роботизированным системам для удержания и перемещения инструмента во время операции. Система содержит робот, выполненный с возможностью удерживать и перемещать хирургический инструмент внутри анатомической области. Робот включает узел захвата и удержания инструмента, а также конструкцию, обеспечивающую перемещение узла захвата и удержания инструмента. Указанная конструкция включает первое звено и второе звено, которые выполнены с возможностью вращения относительно осей вращения первого и второго звеньев соответственно. Конструкция выполнена таким образом, что оси вращения первого и второго звеньев пересекаются в точке входа инструмента в тело пациента. Узел захвата и удержания инструмента прикреплен к конструкции, обеспечивающей перемещение узла захвата и удержания инструмента, с помощью первого и второго цилиндрических шарнирных соединений. Оси вращения первого и второго цилиндрических шарнирных соединений взаимно перпендикулярны и пересекаются в точке пересечения осей вращения первого и второго цилиндрических шарнирных соединений. Точка пересечения осей вращения первого и второго цилиндрических шарнирных соединений вместе с точкой пересечения осей вращения первого и второго звеньев располагаются вдоль оси хирургического инструмента. Отклонение точки пересечения осей вращения первого и второго звеньев от точки входа инструмента в тело пациента приводит к изменению углов поворота первого и второго цилиндрических шарнирных соединений. Обеспечивается исключение травмирования пациента при его смещении относительно начального положения. 3 з.п. ф-лы, 1 ил.
1. Роботизированная система для удержания и перемещения инструмента во время операции, содержащая робот, выполненный с возможностью удерживать и перемещать хирургический инструмент внутри анатомической области с прохождением инструмента через точку входа в тело пациента, включающий узел захвата и удержания инструмента, обеспечивающий захват и удержание инструмента с возможностью контролируемого движения рабочей части инструмента, конструкцию, обеспечивающую перемещение узла захвата и удержания инструмента, причем указанная конструкция включает первое звено и второе звено, причем первое звено и второе звено выполнены с возможностью вращения относительно осей вращения первого и второго звеньев соответственно, причем конструкция выполнена таким образом, что оси вращения первого и второго звеньев пересекаются в точке входа инструмента в тело пациента, причем узел захвата и удержания инструмента прикреплен к конструкции, обеспечивающей перемещение узла захвата и удержания инструмента, с помощью первого и второго цилиндрических шарнирных соединений, причем оси вращения первого и второго цилиндрических шарнирных соединений взаимно перпендикулярны и пересекаются в точке пересечения осей вращения первого и второго цилиндрических шарнирных соединений, причем точка пересечения осей вращения первого и второго цилиндрических шарнирных соединений вместе с точкой пересечения осей вращения первого и второго звеньев располагаются вдоль оси хирургического инструмента, причем отклонение точки пересечения осей вращения первого и второго звеньев от точки входа инструмента в тело пациента приводит к изменению углов поворота первого и второго цилиндрических шарнирных соединений.
2. Роботизированная система по п. 1, отличающаяся тем, что конструкция, обеспечивающая перемещение узла захвата и удержания инструмента, содержит звенья, обеспечивающие перемещение узла захвата и удержания инструмента в трех степенях свободы.
3. Роботизированная система по п. 1, отличающаяся тем, что статическое положение первого и второго цилиндрических шарнирных соединений соответствует тому, что точка пересечения осей вращения первого и второго звеньев совпадает с точкой входа инструмента в тело пациента.
4. Роботизированная система по п. 1, отличающаяся тем, что второе звено оборудовано механизмом, перемещающим узел захвата и удержания инструмента относительно оси, проходящей через точку пересечения осей вращения первого и второго звеньев и точку входа инструмента в тело пациента.
| WO 2017115227 A1, 06.07.2017 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 2019175293 A1, 13.06.2019 | |||
| US 2014052155 A1, 20.02.2014 | |||
| US 20180161114 A1, 14.06.2018 | |||
| US 8303575 B2, 06.11.2012 | |||
| US 20190038268 A1, 07.02.2019. | |||

