Изобретение относится к строительству, точнее к строительным сооружениям, еще точнее к их контролю, с помощью радиолокационной техники и может быть использовано для контроля установленных внешних явлений или повреждений внутри изделий таких, как бетонные (железобетонные) стенки, плотины, дамбы, молы, укрытия, опоры мостов, виадуков, площадки аэродромов, капониры и т.д. Также может быть использована для контроля сооружений из других материалов. Контролируемые дефекты в монолитных изделиях: внутренние повреждения (изменения), трещины, сколы, усадочная деформация, полости, каверны, протоки и т.д.
Общей проблемой контроля подобных сооружений является почти полное отсутствие универсального принципа (устройства) для его осуществления, т.к. контрольное устройство должно находиться с внешней стороны сооружения, а контролировать нужно его внутреннюю часть, желательно на большую глубину.
Имеются попытки создания систем неразрушающего контроля на основе акустических (ультразвуковых) волн, рентгеновского излучения, инфракрасного излучения и другие более или менее экзотичных систем, но все они дальше попыток, не имели полного успеха и в серийное производство не пошли. Например, патенты РФ №115492, №2490606 на основе измерения скорости поверхностной акустической волны и поверхностной ультразвуковой волны соответственно. На основе которых измеряется диагностика остаточной деформации. Эти патенты 2012 и 2013 гг, но до сих пор они не приняты в производство, остались как научно-технический задел.
Недостатки прототипа следующие:
- большие неудобства в эксплуатации, требуется трафарет, который крепится на контролируемую поверхность изделия, по нему один человек водит колесную тележку со сканером, а второй наблюдает за происходящим, на экране дисплея или монитора ПК.
- выбор зондирующего узкополосного луча крайне неудачен, т.к. применение широкополосных зондирующих сигналов с линейно-частотной модуляцией позволяет получить высокую разрешающую
способность по дальности и высокое угловое разрешение.
- малый радиус проникновения в контролируемую среду.
Технической задачей изобретения является повышение разрешающей способности и быстродействия.
Технической результат достигается за счет применения широкополосного радиолокатора с синтезированной апертурой, зондирующего сигнала с линейно-частотной модуляцией, корреляционно-фильтровой обработкой отраженного сигнала, внутренней когерентности системы, получение голографического синтеза 3D изображений.
Для решения поставленной задачи предлагается:
Система радиолокационного бесконтактного контроля бетонных и железобетонных конструкций, основанная на применении MIMO-форматах радиолокационных сигналов, характеризующаяся тем, что содержит: микроконтроллер, блок прямого цифрового синтеза частоты, усилитель, блок согласования напряжений, переключатель, первый и второй полосовой фильтр, предусилитель, смеситель, усилитель с программируемым коэффициентом усиления, ПК, принтер и антенную решетку MIMO-формата со следующими соединениями:
Микроконтроллер первой шиной соединен с управляющим входом переключателя, второй шиной с управляющим входом блока прямого цифрового синтеза частоты, третьей шиной с задающим входом усилителя с программируемым коэффициентом усиления, выход блока прямого цифрового синтеза частоты соединен с первым входом смесителя, а через усилитель и согласователь с входом переключателя, выход которого соединен с MIMO, выход которого через переключатель, соединен через полосовой фильтр, усилитель соединен со вторым входом смесителя, выход смесителя через полосовой фильтр и усилитель с программируемым коэффициентом усиления соединен с входом микроконтроллера, выход которого соединен с персональным компьютером и принтером.
Система неразрушающего контроля по п. 1, характеризующаяся тем, что конструктив системы выполнен в виде ручного сканера, состоящего из трех составных частей: корпуса с ручкой в виде плоской рамки, жестко прикрепленной к переднему концу корпуса, и персонального компьютера-ноутбука, связанного с другого конца корпуса шинами связи.
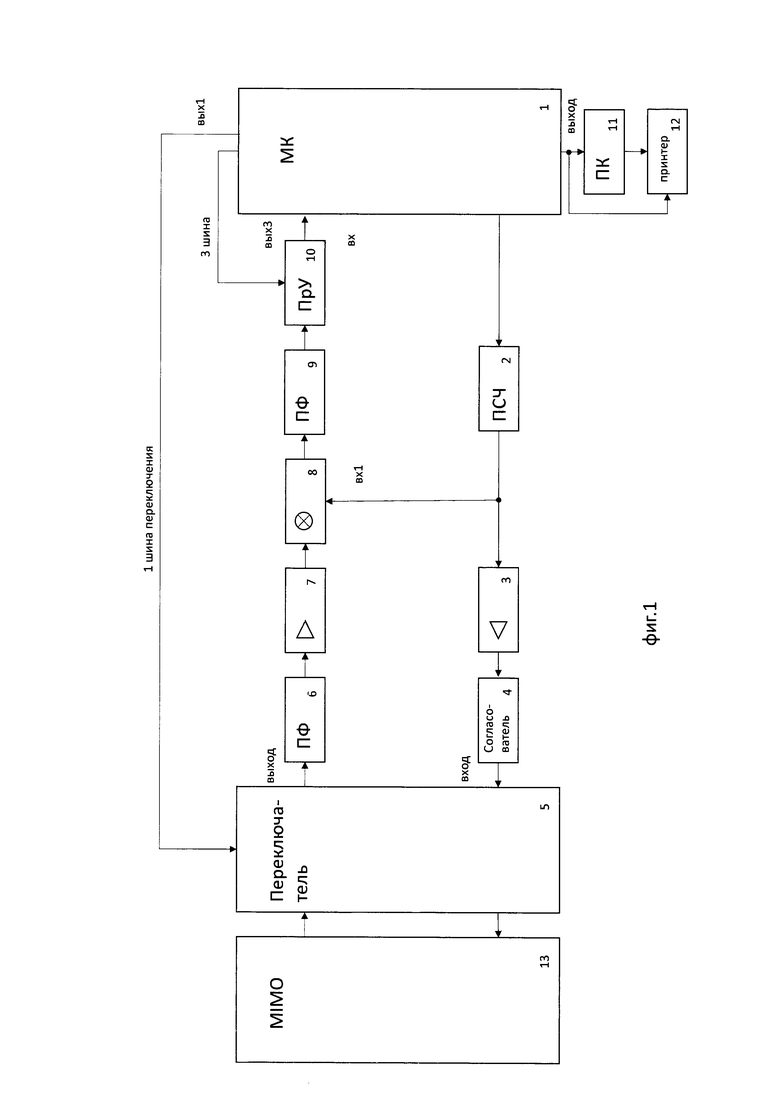
На фиг. 1 приведена структурная электрическая схема системы, на которой изображено:
1 - микроконтроллер (МК)
2 - блок прямого цифрового синтеза частоты (ПСЧ)
3 - усилитель
4 - блок согласования напряжений (БСН)
5 - переключатель
6 - первый полосовой фильтр (ПФ)
7 - предусилитель
8 - смеситель
9 - второй полосовой фильтр
10 - усилитель с программируемым коэффициентом усиления (ПрУ)
11 - персональный компьютер (ПК)
12 - антенная решетка MIMO- формата
Схема имеет следующие соединения:
МК1 первой шиной соединен с управляющим входом переключателя 5, второй шиной с управляющим входом ПСЧ 2, третьей шиной с задающим входом ПрУ 10, выход ПСЧ 2 соединен с первым входом смесителя 8, а через усилитель и согласователь 4 с входом переключателя 5, выход которого соединен с MIMO 13, выход которого через переключатель 5, соединен через ПФ 6, усилитель 7 со вторым входом смесителя 8, выход смесителя 8 через ПФ 9 и ПрУ соединен с входом МК 1, выход которого соединен с ПК 11 и принтером 12.
В основу построения системы положены следующие принципы работы радиолокаторы:
• зондирующий сигнал с линейной частотной модуляцией (ЛЧМ);
• корреляционно-фильтровая обработка отраженного сигнала, внутренняя когерентность системы;
• радиоголографический синтез изображения (метод синтезированной апертуры);
• неподвижная антенная система.
Цель их применения состоит в следующем:
• высокой разрешающей способности по дальности за счет применения сверхширокополосного зондирующего сигнала;
• высокого углового разрешения за счет синтеза апертуры при использовании малогабаритных спиральных антенн (с круговой поляризацией)
• быстрого процесса сканирования.
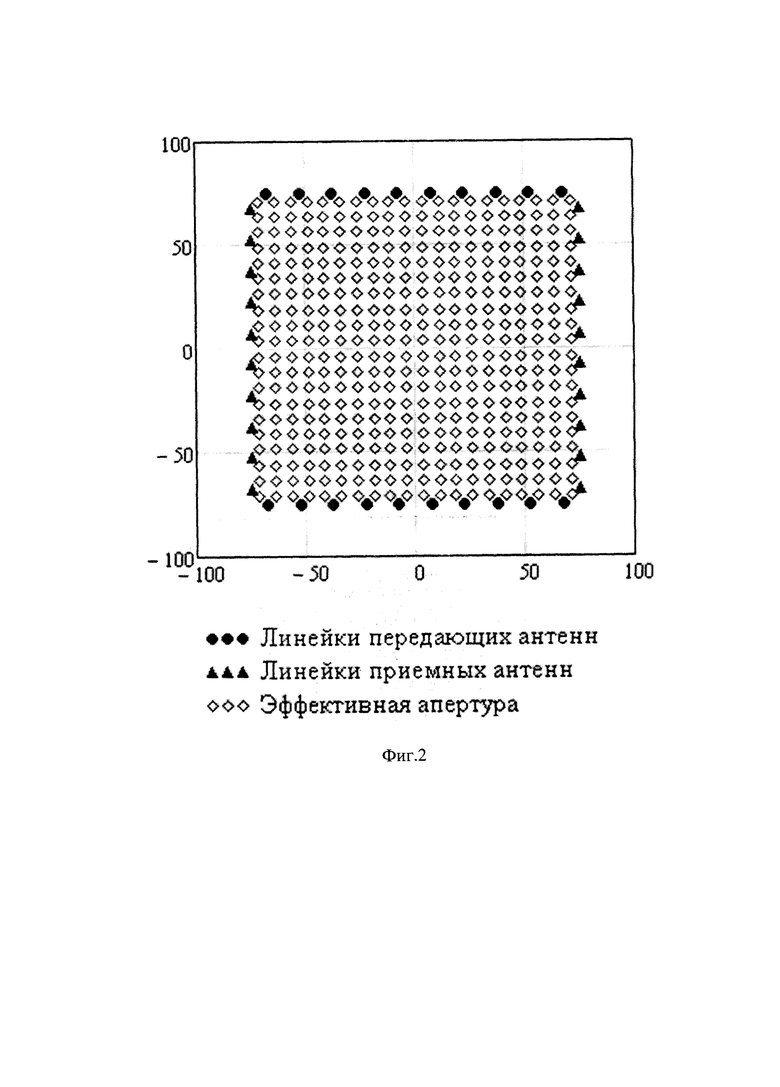
На фиг. 2 приведена общая структурная схема антенной решетки РЛС синтезатора, состоящая из антенной рамки включающая две передающие линейки и еще две приемные линейки, на ней изображено:
а - линейки передающих антенн;
б - линейки приемных антенн;
в - эффективная апертура.
В реальности число ячеек определяется техническими требованиями к системе: разрешающая способность по дальности, требуемая диаграмма направленности и т.д; и может быть увеличено или уменьшено.
На фиг. 3 приведена общая структурная схема антенной решетки РЛС синтезатора, состоящая из антенной рамки включающая две передающие линейки и еще две приемные линейки, на ней изображено:
а - линейки передающих антенн;
б - линейки приемных антенн;
в - эффективная апертура.
В реальности число ячеек определяется техническими требованиями к системе: разрешающая способность по дальности, требуемая диаграмма направленности и т.д. И может быть увеличено или уменьшено.
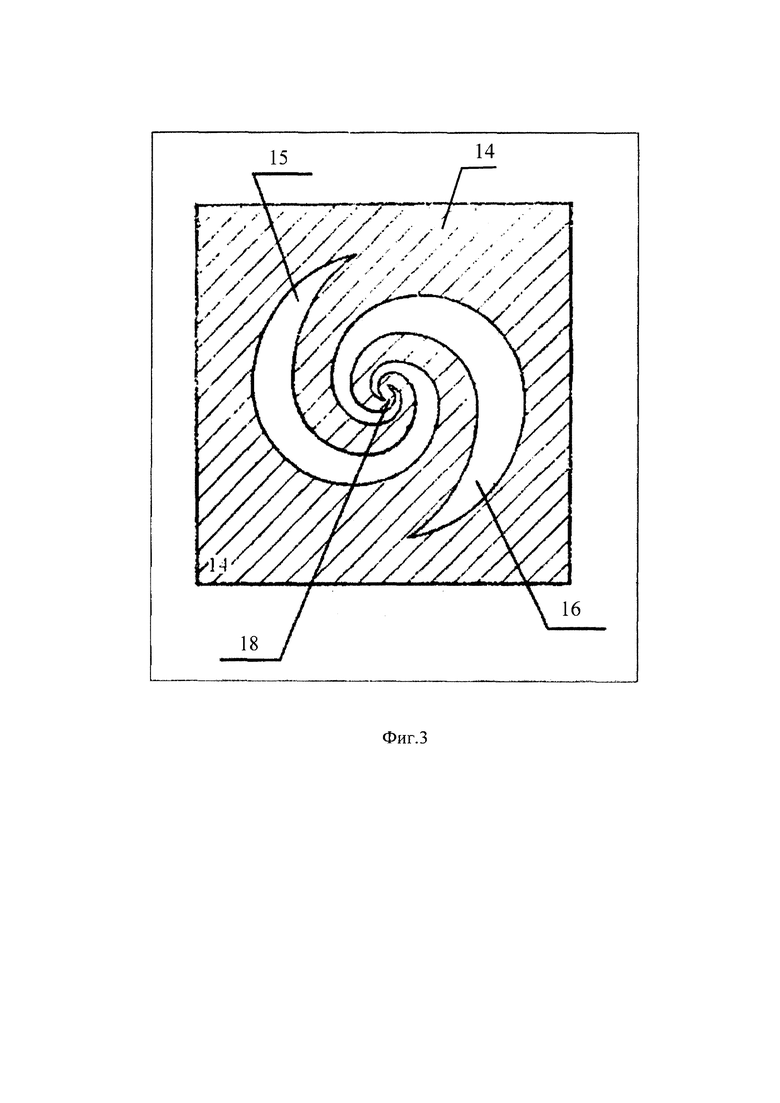
На фиг. 3 представлен элемент линеек передающих-приемных антенн, на которой показано:
14 - фольгированный стеклотекстолит
15 и 16 - элементы двухзаходной спирали, вырезанные в стеклотекстолите
18 - точка возбуждения.
Конструктив антенного элемента выбран в виде двухзаходной спирали, исходя из условий: очень прост в изготовлении, имеет малые габариты (5x5 см) и имеет широкую круговую диаграмму направленности.
Схема, показанная на фиг. 1, работает следующим образом. Управление системы производится при помощи микроконтроллера, обозначенного цифрой 1. Излучаемый сигнал формируется при помощи схемы прямого цифрового синтеза частоты (ПСЧ) 2. Выходной сигнал усиливается при помощи усилителя 3 и через согласователь 4 поступает на схему переключения антенн 5. Также сигнал с выхода ПСЧ 2 поступает на вход смесителя 8 в качестве опорного. Принимаемый отраженный задержанный сигнал проходит через полосовой фильтр промышленных частот 6, и предусилтель 7. Усиленный сигнал поступает на вход смесителя 8. Выходной сигнал смесителя имеет сигналы разностной, так и суммарной частот (биений). Высокочастотная составляющая фильтруется полосовым фильтром 9. Усилитель с программируемым коэффициентом усиления ПрУ 10 усиливает напряжение до опорного напряжения АЦП в 8 МК 1. Управление программируемым усилителем и ПСЧ осуществляется при помощи шины SPI (шины 2 и 3). Оцифрованные данные обрабатываются на МК 1 и передаются на ПК 11 и принтер 12 по аппаратному протолку стандарта RS-232.
Работа системы под руководством МК 1 осуществляется следующим образом. Входными параметрами при формировании ЛЧМ сигнала являются: начальная частота (f0); девиация частоты (Δf); число оцифрованных точек сигнала биения (N) и частота дискретизации (fs). Также входными параметрами при инициации МК являются коэффициент усиления программируемого усилителя 10 и период коммутации переключателя. В выбранных параметрах конфигурирования ЛЧМ сигнала период модуляции может быть рассчитан как
Tm=N/fs
Где Tm - период модуляции, N - число точек выборки сигнала биений, соответствующих одному периоду модуляции ЛЧМ, fs - частота дискретизации.
После окончания формирования ЛЧМ сигнала и, соответственно, окончания оцифровки сигнала биений устанавливается заданная пауза между измерениями. В течении заданной паузы происходит коммутации преобразователя 5 и полученная выборка передается на ПК 11.
Формирование ЛЧМ сигнала в разработанной схеме осуществляется при помощи переключения частоты генератора прямого синтеза сигнала. Оцифровка сигнала осуществляется с частотой дискретизации, равной частоте переключения генератора. Аналого-цифровое преобразование проводится в конце каждого периода действия заданной частоты. По входным параметрам определяется период изменения частоты ЛЧМ сигнала (dt), шаг изменения частота ЛЧМ сигнала (df) и период модуляции (Tm). Иллюстрация принципа формирования частоты представлена на рисунке 2. также на рисунке схематично показаны моменты оцифровки сигнала биений.
Работа с прибором (сканером) происходит следующим образом. Оператор берет сканер за рукоятку, включает его и подносит антенную решетку (АР) к контролируемым местам последовательно по заданной задаче контроля справа-налево, вверх-вниз. Полученные данные сохраняются в памяти ПК и записаны в принтере и доступны для расшифровки.
Следует заметить. Система предназначена для проведения обследования бетонных и железобетонных конструкций типа колонна, стена, плита, балка и т.д. по следующим параметрам: толщина объекта, определение параметров армирования (расстояние от наружной плоскости объекта до грани арматурного стержня, диаметр, шаг стержней армирования, возможно, число слоев армирования, 3D-визуализация структуры с построением карты армирования объекта). Для этого антенны ГГц диапазона расположенных попарно перпендикулярно друг другу. Во время сканирования осуществляется поочередная коммутация каждой пары к одноканальному приемопередатчику. Эта функция коммутации реализована в блоке формирования СВЧ сигнала. В случае использования антенн с круговой поляризацией к приемо-передатчику подключается по одной приемной и передающей антенне.
При исследовании требований потенциальных пользователей разрабатываемого прибора было выявлено, что максимально возможный размер рамки MIMO системы не должен быть больше, чем 1 м. х 1 м. Отсюда следует еще одно требование к антеннам, кроме широкой рабочей полосы и поляризации, это размер. Чем больше антенн в рамке MIMO системы, тем больше независимых каналов N=Nг*Nв, где Nг - количество антенн в горизонтальных сторонах рамки, Nв - количество антенн в вертикальных сторонах рамки, тем выше энергетика системы и соотношение сигнал/шум.
По требованию заказчика в систему может быть введен оптический блок позиционирования на МК с камерой Raspberry, блок служит для определения координат датчика относительно области зондирования.
Также по требованию заказчика могут быть совместно дополнительно применены антенны с линейной поляризацией для улучшения разрешающей способности, но это усложняет конструкцию и СПО.
Для обработки и хранения информации может быть применен любой внешний компьютер с соответствующим специальным программным обеспечением.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2828006C1 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ НАДВОДНЫХ ДРОНОВ | 2023 |
|
RU2824842C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ВВЕДЕННОГО ИМПЛАНТАТА | 2019 |
|
RU2726595C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ШИРОКОПОЛОСНЫМ НЕПРЕРЫВНЫМ ЛИНЕЙНО ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2010 |
|
RU2460087C2 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
Изобретение относится к радиолокационной технике, в частности, к системам радиолокационного бесконтактного контроля бетонных и железобетонных изделий и конструкций. Техническим результатом является повышение разрешающей способности и быстродействия системы. Технический результат достигается тем, что предложен широкополосный радиолокатор с антенной решеткой MIMO-формата с синтезированной апертурой, в котором микроконтроллер первой шиной соединен с управляющим входом переключателя, второй шиной с управляющим входом блока прямого цифрового синтеза частоты, третьей шиной с задающим входом усилителя с программируемым коэффициентом усиления, выход блока прямого цифрового синтеза частоты соединен с первым входом смесителя, а через усилитель и согласователь с входом переключателя, выход которого соединен с антенной решеткой MIMO-формата, выход которой через переключатель, соединен через первый полосовой фильтр и усилитель со вторым входом смесителя, выход смесителя через второй полосовой фильтр и усилитель с программируемым коэффициентом усиления соединен с входом микроконтроллера, выход которого соединен с персональным компьютером и принтером. 1 з.п. ф-лы, 3 ил.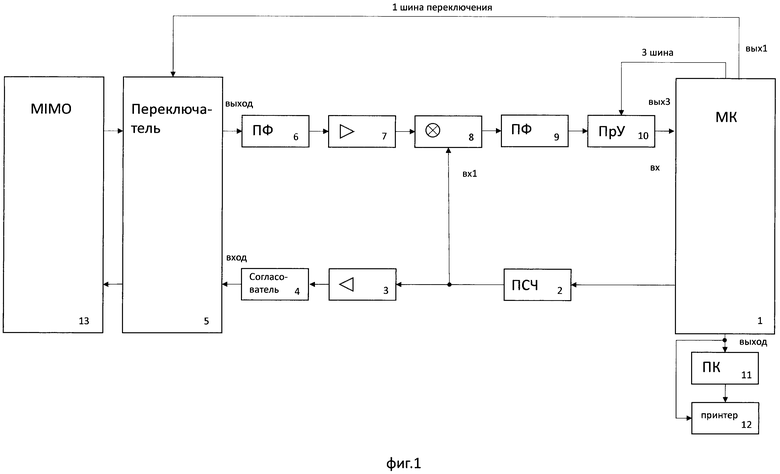
1. Система радиолокационного бесконтактного контроля бетонных и железобетонных конструкций, основанная на применении MIMO-форматов радиолокационных сигналов, характеризующаяся тем, что содержит: микроконтроллер, блок прямого цифрового синтеза частоты, усилитель, блок согласования напряжений, переключатель, первый и второй полосовой фильтр, предусилитель, смеситель, усилитель с программируемым коэффициентом усиления, персональный компьютер (ПК), принтер и антенную решетку MIMO-формата со следующими соединениями: микроконтроллер первой шиной соединен с управляющим входом переключателя, второй шиной с управляющим входом блока прямого цифрового синтеза частоты, третьей шиной с задающим входом усилителя с программируемым коэффициентом усиления, выход блока прямого цифрового синтеза частоты соединен с первым входом смесителя, а через усилитель и согласователь с входом переключателя, выход которого соединен с антенной решеткой MIMO-формата, выход которой через переключатель, соединен через первый полосовой фильтр и усилитель со вторым входом смесителя, выход смесителя через второй полосовой фильтр и усилитель с программируемым коэффициентом усиления соединен с входом микроконтроллера, выход которого соединен с ПК и принтером.
2. Система радиолокационного бесконтактного контроля по п. 1, характеризующаяся тем, что конструктив системы выполнен в виде ручного сканера, состоящего из трех составных частей: корпуса с ручкой в виде плоской рамки, жестко прикрепленной к переднему концу корпуса, и персонального компьютера-ноутбука, связанного с другого конца корпуса шинами связи.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОВЕРХНОСТНОЙ УЛЬТРАЗВУКОВОЙ ВОЛНЫ | 2012 |
|
RU2490606C1 |
| Реле частоты | 1957 |
|
SU115492A1 |
| US 20220326368 A1, 13.10.2022 | |||
| US 11262436 B2, 01.03.2022 | |||
| US 20220050176 A1, 17.02.2022 | |||
| US 9182476 B2, 10.11.2015. | |||
