Область техники, к которой относится изобретение
Данное изобретение относится к области систем привода элементов газотурбинного двигателя при помощи силовых цилиндров. В частности, изобретение относится к мониторингу таких систем привода.
Уровень техники
Газотурбинный двигатель классически содержит модули, имеющие подвижные элементы, такие как сопла или лопатки. Эти элементы должны двигаться по команде, и их движением управляют при помощи одного или нескольких силовых цилиндров. Эти подвижные элементы образуют кинематическую систему рассматриваемого модуля и классически приводятся в движение силовыми цилиндрами. Из соображений безопасности и избыточности обычно производят два измерения положения на силовом(ых) цилиндре(ах) при помощи системы индикации обратной связи по положению.
С учетом стоимости невозможно оснастить каждый силовой цилиндр такой системой обратной связи по положению. Таким образом, если имеется число силовых цилиндров более двух, то только два силовых цилиндра, называемые ведущими силовыми цилиндрами, классически оснащены такой обратной связью.
Такая обратная связь по положению по сути является измеренным положением силовых цилиндров в ответ на применяемое к силовым цилиндрам заданное значение положения. Действительно, положение силовых цилиндров позволяет узнать степень подвижности кинематической системы модуля, например, положение сопла, или степень поворота лопатки.
Как известно, оба силовых цилиндра должны иметь одинаковую обратную связь по положению в ответ на одинаковое заданное значение. Если имеется отклонение между измеренными положениями двух силовых цилиндров, то, значит, существует проблема «отклонения измерения между силовыми цилиндрами», которая связана с износом системы привода, что может привести к поломкам. Были отмечены многократные случаи сообщений обслуживания «отклонения измерения между силовыми цилиндрами» на системах привода, имеющих большой совокупный срок работы. Эти «отклонения измерения между силовыми цилиндрами» связаны с серьезным износом кинематической системы привода, что приводит к смещению положения между двумя силовыми цилиндрами, оснащенными обратной связью по положению, но которые не обязательно свидетельствуют о поломке.
Это усугубление неисправностей (реальных или нет) заставляет устранять неисправности под крылом (прямой ремонт на самолете без снятия системы привода) и на заводе. Это устранение неисправностей является очень дорогим с точки зрения затрат по трудовым ресурсам и по времени (поиск поломки, замена силовых цилиндров).
Чтобы избежать этих операций обслуживания и продлить срок службы под крылом до снятия, существует потребность в улучшении обнаружения отклонений измерения между силовыми цилиндрами, без чего может произойти увеличение числа констатаций отклонений измерения между силовыми цилиндрами по мере старения систем привода. Это увеличение числа сообщений отклонения приводит к сокращению полезного времени работы двигателей и к увеличению расходов, связанных с операциями обслуживания.
Следовательно, существует потребность в улучшении обнаружения «отклонения измерения между силовыми цилиндрами» с учетом специфики, связанной с нормальным износом системы привода.
Раскрытие сущности изобретения
Данное изобретение призвано предложить систему мониторинга, которая не имеет недостатков известных технических решений.
Для этого первым объектом изобретения является способ мониторинга системы привода подвижного элемента, в частности, подвижного элемента газотурбинного двигателя, такого как сопло или лопатка, при этом указанная система привода содержит устройство управления, выполненное с возможностью передавать заданное значение положения на первый силовой цилиндр и второй силовой цилиндр, при этом каждый силовой цилиндр выполнен с возможностью выдавать измерение обратной связи по положению в ответ на указанное заданное значение положения, при этом способ осуществляется в системе мониторинга и содержит:
- первый режим мониторинга, при котором обнаруживают отклонения между измерениями обратной связи по положению двух силовых цилиндров;
- второй режим мониторинга, при котором не обнаруживают отклонения между измерениями обратной связи по положению двух силовых цилиндров;
при этом второй режим мониторинга выбирают, как только по меньшей мере одно из двух измерений обратной связи по положению оказывается в переходной фазе.
Предпочтительно изобретение можно дополнить следующими отличительными признаками, рассматриваемыми отдельно или в любой из их технически возможных комбинаций:
- способ содержит обнаружение (Т1, Т2) переходной фазы измерения обратной связи по положению (12, 22), при котором сравнивают (Е3) градиент напряжения измерения с порогом;
- напряжение измерения находится в переходной фазе, если градиент напряжения измерения превышает указанный порог;
- обнаружение переходной фазы включает в себя этап подтверждения переходной фазы, на котором обнаруживают переходную фазу указанного напряжения измерения в течение заранее определенного времени, называемого временем подтверждения;
- заранее определенное время составляет от 60 до 100 мс, как правило, 80 мс.
Вторым объектом изобретения является система мониторинга системы привода подвижного элемента, в частности подвижного элемента газотурбинного двигателя, такого как сопло или лопатка, при этом указанная система привода содержит устройство управления, выполненное с возможностью передавать заданное значение положения на первый силовой цилиндр и второй силовой цилиндр, при этом каждый силовой цилиндр выполнен с возможностью выдавать измерение обратной связи по положению в ответ на указанное заданное значение положения, при этом указанная система мониторинга выполнена с возможностью осуществлять способ, являющийся первым объектом изобретения.
Третьим объектом изобретения является элемент газотурбинного двигателя, выполненный с возможностью своего приведения в действие системой привода, контролируемой при помощи системы мониторинга, являющейся вторым объектом изобретения.
Изобретение имеет целый ряд преимуществ.
Обнаружение отклонений измерения обратной связи по положению между каждым силовым цилиндром позволяет обнаруживать электрические дрейфы компонентов цепи считывания обратной связи по положению.
В случае кинематической системы, контролируемой двумя ведущими силовыми цилиндрами, каждый из которых оснащен обратной связью по положению, отслеживаемые отклонения между двумя силовыми цилиндрами могут быть связаны с электрическими причинами, а также с механическими причинами. Следовательно, переходные явления выработки зазоров или износа приводят к ненадежности в мониторинге отклонения, вследствие чего происходят ошибочные обнаружения отклонений.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве исключительно иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
на фиг. 1 представлена окружающая среда применения изобретения;
на фиг. 2 показана блок-схема этапов способа согласно варианту осуществления изобретения;
на фиг. 3 показаны задачи, решаемые при помощи изобретения;
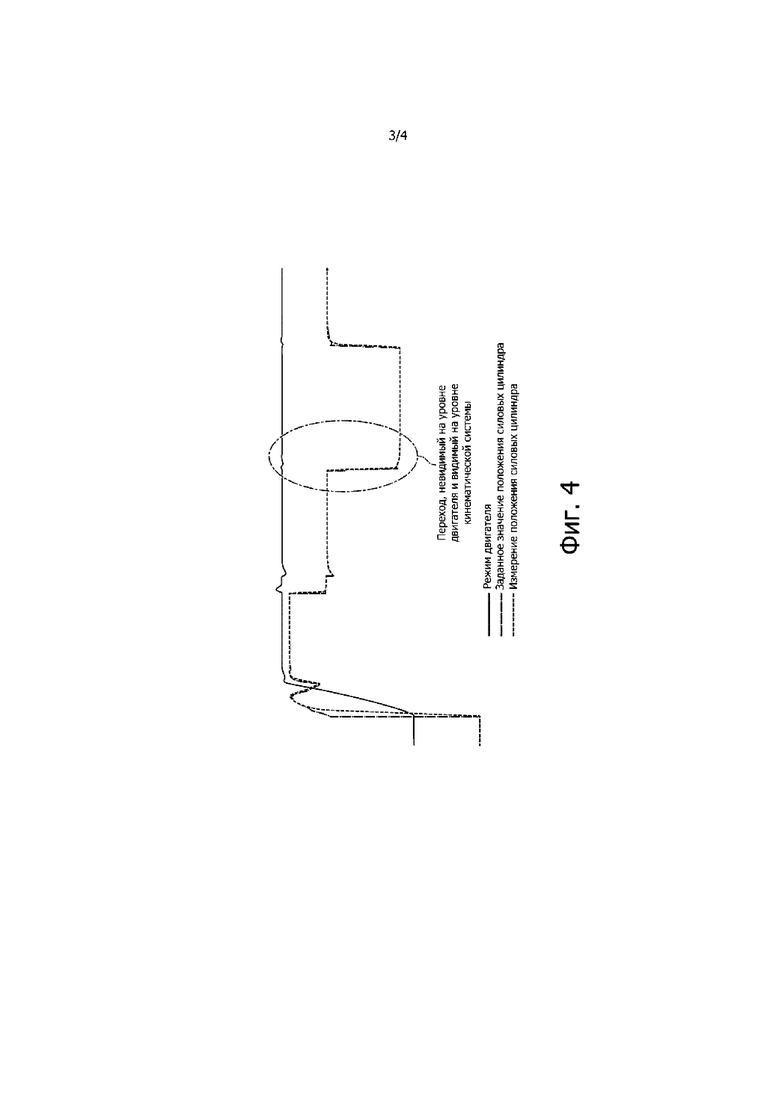
на фиг. 4 показаны видимые и невидимые переходы, различаемые при помощи изобретения;
на фиг. 5 показана блок-схема подэтапов способа согласно варианту осуществления изобретения.
На всех фигурах подобные элементы имеют одинаковые обозначения.
Осуществление изобретения
На фиг. 1 показана система 10 привода элемента газотурбинного двигателя, такого как сопло или лопатка, которая содержит устройство 1 управления, выполненное с возможностью передавать заданное значение положения CONS на первый силовой цилиндр 11 и на второй силовой цилиндр 21. Первый силовой цилиндр 11 и второй силовой цилиндр 21 являются, в частности, так называемыми «ведущими» силовыми цилиндрами системы привода: каждый из них оснащен модулем 12, 22 обратной связи по положению. Другие силовые цилиндры, если они присутствуют, не имеют такого модуля.
Заданное значение положения CONS преобразуют в заданное напряжение для управления силовым цилиндром 11, 21. В результате приложения заданного значения положения CONS к каждому силовому цилиндру каждый силовой цилиндр 11, 21 перемещается в соответствии с указанным заданным значением CONS. Чтобы проверить, что силовой цилиндр 11, 21 переместился на заданное значение положения, каждый силовой цилиндр 11, 21 оснащен, как было указано выше, модулем 12, 22 обратной связи по положению, который измеряет действительное перемещение силового цилиндра 11, 21 (в дальнейшем называемое измерением обратной связи по положению 12, 22). В данном случае под измерением обратной связи по положению 12, 22 следует понимать измеренное напряжение, пропорциональное действительному перемещению силового цилиндра 11, 21. Специалисту в данной области понятно, что можно рассматривать также другой тип сигнала, соответствующего обратной связи по положению силового цилиндра.
Чтобы проверить нормальную работу системы привода, измерения обратной связи по положению 12, 22 от модулей обратной связи по положению поступают в систему 20 мониторинга, которая позволяет, в частности, оценить отклонения измерений обратной связи по положению 12, 22 каждого силового цилиндра 11, 21. Для этого система 20 мониторинга содержит блок обработки, такой как процессор, для осуществления способа мониторинга, описанного ниже со ссылками на фиг. 2.
Система 20 мониторинга получает на входе каждое измерение обратной связи по положению 12, 22, поступающее от модулей обратной связи по положению.
На основании измерений обратной связи по положению 12, 22 осуществляют обнаружение переходной фазы (соответственно этапы Т1, Т2) измерения обратной связи по положению 12, 22 каждого силового цилиндра 11, 21.
Такое обнаружение Т1, Т2 позволяет оценить, находится ли измерение обратной связи по положению 12, 22, относящееся к каждому силовому цилиндру 11, 21, в переходной фазе, и можно ли его считать надежным.
Действительно, заявитель заметил, что отклонения измерений обратной связи по положению между силовыми цилиндрами 11, 21 увеличивались, когда эти измерения находились в переходной фазе. Переходной фазой называют фазу, в течение которой кинематическая система находится в движении.
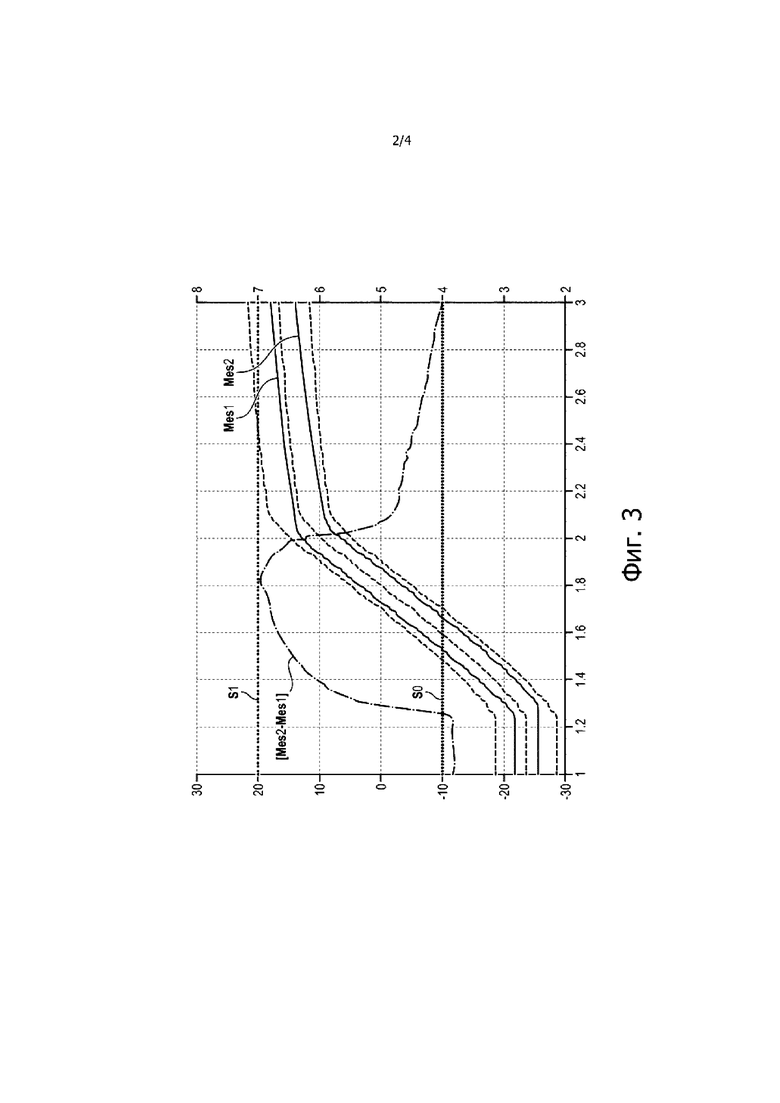
На фиг. 3 показано, что в переходных фазах отклонения между измерениями между силовыми цилиндрами 11, 21 увеличиваются. На фигурах показаны:
- изменение измерения обратной связи по положению первого силового цилиндра 11 (кривая Mes1),
- изменение измерения обратной связи по положению второго силового цилиндра 21 (кривая Mes2),
- изменение отклонения между двумя измерениями (кривая ⏐Mes2 - Mes1⏐),
- первый порог обнаружения S0 и второй порог обнаружения S1.
Таким образом, было отмечено, что даже при увеличении порога обнаружения от S0 до S1 отклонение между двумя измерениями по-прежнему находится над порогом S1 в течение длительного времени, поэтому трудно параметрировать порог и время наблюдения отклонения (чтобы убедиться, что отклонение действительно находилось над порогом), что одновременно обеспечило бы надежный мониторинг (за счет определения верхнего порога обнаружения) и позволило бы избегать ложных обнаружений поломок.
Следовательно, с учетом этого замечания заявитель предлагает не контролировать отклонение измерения обратной связи по положению во время этих переходных фаз, так как в этом случае мониторинг не является робастным, то есть не является надежным.
Таким образом, в зависимости от того, имеют ли переходный характер измерения обратной связи по положению или нет, способ мониторинга, осуществляемый системой мониторинга, содержит два режима мониторинга, которые соответственно можно выбирать (этап SEL). Таким образом, определяют:
- первый режим мониторинга М1, при котором обнаруживают отклонения между измерениями обратной связи по положению двух силовых цилиндров 11, 21;
- второй режим мониторинга М1, при котором не производят обнаружения отклонений между измерениями обратной связи по положению двух силовых цилиндров 11, 21.
Второй режим мониторинга М2 выбирают (этап SEL), как только по меньшей мере одно из двух измерений обратной связи по положению 12, 22 оказывается в переходной фазе.
Таким образом, как только одно из двух измерений обратной связи по положению 12, 22 оказывается в переходной фазе, выбирают первый режим или второй режим мониторинга.
Когда выбирают первый режим М1, отклонение измерения обратной связи по положению 12, 22 позволяет генерировать, в случае необходимости, тревожный сигнал (этап ALE) о ненормальном отклонении измерения, что приводит к запуску операции обслуживания. С учетом этого порог запуска является фиксированным и зависит от параметров приводимой в действие системы и системы ее привода.
Чтобы учитывать вариативность переходных фаз, связанную со старением двигателя, и/или с режимом работы, и/или с областью полета, и/или с типами маневрирования (медленные или быстрые ускорения/замедления), и чтобы получить точный контроль обнаружения переходной фазы на уровне силовых цилиндров 11, 21, обнаружение переходной фазы производят посредством мониторинга градиента каждого из измерений обратной связи по положению 12, 22, а не на уровне переходной фазы самого двигателя (общее изменение режима/температуры/давления двигателя, а не конкретно рассматриваемого модуля). Действительно, существуют некоторые переходные фазы, видимые на уровне силовых цилиндров 11, 21, но не на уровне двигателя, как показано на фиг. 4. Таким образом, предпочтительно переходный характер каждого измерения обратной связи по положению 12, 22 оценивают, рассматривая градиент каждого измерения. Разумеется, можно применять и другие возможности оценки переходного характера измерений.
Обнаружение переходного характера (этапы Т1, Т2) включает в себя следующие этапы, описанные со ссылками на фиг. 5.
Градиент измерения обратной связи по положению для данного силового цилиндра 11, 21 получают следующим образом (этап Е1):
градиентi = измерениеi - измерениеi-1,
где i и i-1 являются моментом считывания измерения. Таким образом, градиент, вычисленный в момент i, является разностью между двумя последовательными измерениями.
Таким образом, обнаружение переходной фазы производят на основании измерения обратной связи по положению 12, 22 (отображение реального положения силовых цилиндров 11, 21), а не на основании заданного значения положения CONS силовых цилиндров 11, 21. Действительно, заданное значение CONS не может в любой момент отображать реальное поведение силовых цилиндров 11, 21, в частности, в конце переходной фазы, когда заданное значение CONS является стабилизированным, но когда силовые цилиндры 11, 21 завершают свое перемещение. Недостатком этого может быть электрическое зашумление измерения обратной связи по положению 12, 22, которое будет иметь колебания, связанные с усилиями, действующими на силовые цилиндры 11, 21. Следовательно, градиент, полученный на основании такого измерения, будет соответственно зашумленным, что требует осуществления обнаружения переходной фазы на фильтрованном измерении обратной связи по положению 12, 22.
Градиент, вычисляемый в момент i, фильтруют следующим образом (этап Е2):
Фильтрованный_градиентi = фильтрованный_градиентi-1 + СТЕ. (градиентi - фильтрованный_градиентi-1).
Фильтрация учитывает два последовательно вычисленных значения градиента.
Константу СТЕ фильтра фиксируют, учитывая следующие элементы:
- большая константа времени позволяет отфильтровать большинство электрических и механических помех, но значительно задерживает обнаружение градиента и существенно ослабляет уровни колебаний переходной(ых) фазы(фаз);
- незначительная константа времени позволяет быстро обнаружить переходную фазу, но способствует ложным обнаружениям переходной(ых) фазы(фаз), как только они достигают уровней, близких к порогу (который может быть довольно низким в зависимости от динамики кинематической системы в точках, где гидромеханическая мощность является слабой).
После этого значение градиента, фильтрованного в момент i, сравнивают с порогом (этап Е3). В частности, чтобы показать переходный характер измерения обратной связи по положению 12, 22 рассматриваемого силового цилиндра 11, 21, необходимо, чтобы это значение градиента, отфильтрованного в момент i, превышало заранее определенный порог.
Чтобы не отключать мониторинг слишком рано, переходный характер необходимо подтвердить во время этапа подтверждения (этап Е4).
Для этого фильтрованный градиент должен превышать определенный порог в течение заранее зафиксированного времени, называемого временем подтверждения. Такое время обычно составляет от 60 до 100 мс, предпочтительно 80 мс. Время подтверждения должно быть достаточно большим, чтобы обеспечивать робастность, но не слишком большим, чтобы не создавать слишком большой задержки для отключения мониторинга отклонений. Для этого время подтверждения должно быть функцией самого короткого времени, существующего в кинематической системе. Таким образом, время подтверждения устанавливают эмпирическим путем.
Если переходный характер измерения обратной связи по положению 12, 22 считается подтвержденным, мониторинг отклонения измерения между силовыми цилиндрами 11, 21 отключают.
При осуществлении выбора режима мониторинга выбирают второй режим мониторинга М2. В противном случае выбирают первый режим мониторинга М1.
Время подтверждения является предпочтительным по двум причинам:
- фильтрация градиента приводит к задержке в обнаружении переходного характера и к ослаблению амплитуды значения, что заставляет предусмотреть снижение порога обнаружения по сравнению с обнаружением на не фильтрованных значениях.
- снижение порога обнаружения может привести к несвоевременным обнаружениям переходных фаз и к неоправданному отключению мониторинга.
Предпочтительно описанное выше изобретение предполагает самостоятельное обнаружение переходной фазы по отношению к силовым цилиндрам 11, 21 рассматриваемого модуля: оно зависит только от собственных параметров силовых цилиндров 11, 21 и не основано ни на состоянии двигателя (стационарный режим, переходный режим и т.д.), ни на заданном значении CONS, применяемом к силовым цилиндрам 11, 21. При этом система 20 мониторинга становится независимой от любого вида неисправности (начало измерения при электрическом дрейфе) и от любой вариативности двигателя. Кроме того, настоящим изобретением предложены средства для преодоления недостатков, связанных с использованием зашумленных измерений, путем введения фильтрации измерений обратной связи по положению 12, 22 и подтверждения начала и конца переходной фазы. Наконец, нестоящее изобретение позволяет сделать робастным обнаружение отклонения измерения обратной связи по положению 12, 22 силовых цилиндров 11, 21 путем преодоления ограничений, связанных с расширением порога и/или задержки, и, следовательно, позволяет улучшить отслеживание проблем (мониторинг), связанное с обнаружениями неполадок при отклонениях.


Изобретение относится к способу мониторинга системы привода подвижного элемента, в частности подвижного элемента газотурбинного двигателя, такого как сопло или лопатка, при этом указанная система привода содержит устройство управления, выполненное с возможностью передавать заданное значение положения на первый силовой цилиндр и второй силовой цилиндр, при этом каждый силовой цилиндр выполнен с возможностью выдавать измерение обратной связи по положению в ответ на указанное заданное значение положения, при этом способ осуществляется в системе мониторинга и содержит: первый режим мониторинга, при котором обнаруживают отклонения между измерениями обратной связи по положению двух силовых цилиндров; второй режим мониторинга, при котором не обнаруживают отклонения между измерениями обратной связи по положению двух силовых цилиндров; при этом второй режим мониторинга выбирают, как только по меньшей мере одно из двух измерений обратной связи по положению оказывается в переходной фазе. Обнаружение отклонений измерения обратной связи по положению между каждым силовым цилиндром позволяет обнаруживать электрические дрейфы компонентов цепи считывания обратной связи по положению. Наконец, настоящее изобретение позволяет сделать робастным обнаружение отклонения измерения обратной связи по положению силовых цилиндров путем преодоления ограничений, связанных с расширением порога и/или задержки, и, следовательно, позволяет улучшить отслеживание проблем (мониторинг), связанное с обнаружениями неполадок при отклонениях. 3 н. и 4 з.п. ф-лы, 5 ил.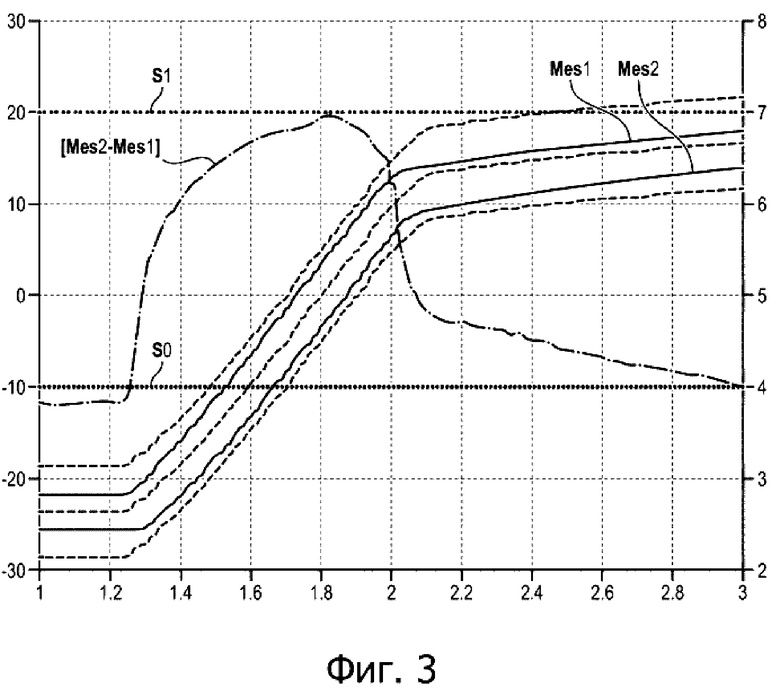
1. Способ мониторинга системы (10) привода подвижного элемента, в частности подвижного элемента газотурбинного двигателя, такого как сопло или лопатка, при этом указанная система (10) привода содержит устройство (1) управления, выполненное с возможностью передавать заданное значение положения (CONS) на первый силовой цилиндр (11) и второй силовой цилиндр (21), при этом каждый силовой цилиндр (11, 21) выполнен с возможностью передачи измерения обратной связи по положению (12, 22) в ответ на указанное заданное значение положения (CONS), при этом способ осуществляется в системе (20) мониторинга и содержит:
- первый режим (М1) мониторинга, при котором обнаруживают отклонения между измерениями обратной связи по положению (12, 22) двух силовых цилиндров (11, 21);
- второй режим (М2) мониторинга, при котором не обнаруживают отклонения между измерениями обратной связи по положению (12, 22) двух силовых цилиндров (11, 21);
при этом второй режим (М2) мониторинга выбирают, как только по меньшей мере одно из двух измерений обратной связи по положению (12, 22) оказывается в переходной фазе.
2. Способ по п. 1, содержащий обнаружение (Т1, Т2) переходной фазы измерения обратной связи по положению (12, 22), при котором сравнивают (Е3) градиент напряжения измерения с порогом.
3. Способ по п. 2, в котором напряжение измерения находится в переходной фазе, если градиент напряжения измерения превышает указанный порог.
4. Способ по п. 2 или 3, в котором обнаружение переходной фазы включает в себя этап подтверждения переходной фазы, на котором обнаруживают переходную фазу указанного напряжения измерения в течение заранее определенного времени, называемого временем подтверждения.
5. Способ по п. 4, в котором заранее определенное время составляет от 60 до 100 мс, как правило, 80 мс.
6. Система (20) мониторинга системы (10) привода подвижного элемента, в частности, подвижного элемента газотурбинного двигателя, такого как сопло или лопатка, при этом указанная система (10) привода содержит устройство (1) управления, выполненное с возможностью передавать заданное значение положения (CONS) на первый силовой цилиндр (11) и второй силовой цилиндр (21), при этом каждый силовой цилиндр (11, 21) выполнен с возможностью выдавать измерение обратной связи по положению (12, 22) в ответ на указанное заданное значение положения, при этом указанная система мониторинга выполнена с возможностью осуществлять способ по одному из пп. 1-5.
7. Элемент газотурбинного двигателя, выполненный с возможностью своего приведения в действие системой привода, контролируемой посредством системы (20) мониторинга по п. 6.
| СПОСОБ АВТОМАТИЧЕСКОЙ КАЛИБРОВКИ ЭЛЕКТРОСИЛОВЫХ ЦИЛИНДРОВ ГОНДОЛЫ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2459100C2 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА КОНТУРА ОБРАТНОЙ СВЯЗИ ПРИВОДНОЙ СИСТЕМЫ ПЕРЕМЕННЫХ ГЕОМЕТРИЙ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2580194C2 |
| US 2018156226 A1, 07.06.2018 | |||
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ ЭЛЕКТРОСТАНЦИЕЙ | 2011 |
|
RU2453980C1 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |
| SU 1596638 A1, 20.06.1996. | |||
