Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственной рабочей системе согласно ограничительной части пункта 1 формулы, и способу оптимизации сельскохозяйственных рабочих процессов с использованием сельскохозяйственной рабочей системы согласно ограничительной части пункта 16 формулы.
Уровень техники
Сельскохозяйственная рабочая система (ЕР 1619517 В1), на которой основано изобретение, содержит несколько сельскохозяйственных рабочих модулей, работающих совместно в определенных рабочих ситуациях. Под сельскохозяйственными рабочими модулями понимают сельскохозяйственные рабочие машины и навесное оборудование, то есть передвижные и/или стационарные сельскохозяйственные устройства. Сельскохозяйственной рабочей машиной может быть любая сельскохозяйственная рабочая машина, используемая для выполнения сельскохозяйственного рабочего задания, например, для обработки почвы, в частности, вспахивания, культивации, боронования и прочих подобных работ. К таким машинам относятся тягачи, в частности, тракторы, а также уборочные машины, в частности зерноуборочные комбайны, кормоуборочные комбайны и иная подобная техника. Такая сельскохозяйственная рабочая машина содержит по меньшей мере один рабочий агрегат, например, наклонную камеру с транспортером, молотильный аппарат, измельчитель, привод ходового механизма, систему рулевого управления или иной подобный агрегат. Сельскохозяйственные рабочие машины, выполненные, в частности, в виде тягачей, например тракторов, могут быть сцеплены с навесным оборудованием, которое в этом контексте также образует сельскохозяйственный рабочий модуль. Под навесным оборудованием понимают, например, плуг, культиватор, борону, косилку, пресс-подборщик или иное подобное оборудование. Такое навесное оборудование содержит по меньшей мере один рабочий агрегат, например, пресс-подборщик содержит устройство для захвата убираемой культуры, устройство для прессования убираемой культуры и иные устройства. Сельскохозяйственные рабочие модули, выполненные в виде стационарных сельскохозяйственных сооружений, представляют собой, например, зерносушилки, зернохранилища и иные подобные сооружения. Такое стационарное сооружение также содержит по меньшей мере один рабочий агрегат, в частности, зерносушилка содержит, например, устройство подачи и/или транспортировки зерна, нагревательное устройство и иные устройства.
В известной сельскохозяйственной рабочей системе каждый отдельный сельскохозяйственный рабочий модуль в целом представляет собой функциональную единицу, предназначенную для выполнения или поддержки сельскохозяйственной работы. Каждая из функциональных единиц содержит собственное управляющее устройство, предназначенное для управления соответствующей функциональной единицей. При этом управление осуществляется на основании сохраненного набора правил. Кроме того, отдельные функциональные единицы располагают собственным коммуникационным интерфейсом, позволяющим обмениваться данными тем функциональным единицам, которые совместно работают в определенной рабочей ситуации. При этом обмен данными осуществляется автоматически без вмешательства оператора. При этом отдельные функциональные единицы обмениваются, например, идентификаторами абонентов, данными о географическом положении, временных интервалах, скорости и направлении движения, определенными параметрами выполняемого рабочего процесса и иными подобными данными с целью координирования совместной работы функциональных единиц. Например, может быть согласована операция перегрузки, в рамках которой зерноуборочный комбайн, образующий одну функциональную единицу, перегружает из своего бункера для зерна в приемный контейнер разгрузочного транспортного средства, например, в транспортный прицеп, сцепленный с другой сельскохозяйственной рабочей машиной, причем разгрузочное транспортное средство или модуль, состоящий из другой сельскохозяйственной рабочей машины и транспортного прицепа, образует вторую функциональную единицу.
Учитывая разнообразие вариантов совместной работы сельскохозяйственных рабочих модулей, обусловленное большим количеством различного навесного оборудования в сочетании с непредсказуемыми условиями окружающей среды, в известной сельскохозяйственной рабочей системе не всегда удается удовлетворительно оптимизировать сельскохозяйственные рабочие процессы. Это относится не только к уборочным процессам, но и, прежде всего, к использованию тракторов с навесным оборудованием, так как в данном случае возможны самые разные варианты тягача, навесного оборудования и вида выполняемой работы.
Раскрытие сущности изобретения
Задачей предложенного изобретения является дальнейшее развитие и усовершенствование известной сельскохозяйственной рабочей системы с целью дальнейшей оптимизации совместной работы нескольких функциональных единиц сельскохозяйственной рабочей системы при выполнении сельскохозяйственных рабочих процессов.
Поставленная задача решена сельскохозяйственной рабочей системой согласно ограничительной части пункта 1 формулы изобретения, с помощью признаков, раскрытых в отличительной части пункта 1 формулы.
Предложенная сельскохозяйственная рабочая система содержит несколько функциональных единиц, предназначенных для выполнения или поддержки сельскохозяйственной работы. Функциональные единицы могут представлять собой отдельные сельскохозяйственные рабочие модули, как будет описано ниже, или отдельные рабочие агрегаты для выполнения или поддержки сельскохозяйственной работы внутри сельскохозяйственного рабочего модуля. Также возможны их комбинации, то есть по меньшей мере одна функциональная единица образована сельскохозяйственным рабочим модулем, и по меньшей мере одна вторая функциональная единица образована рабочим оборудованием внутри сельскохозяйственного рабочего модуля. В определенной рабочей ситуации несколько функциональных единиц всегда работают вместе для выполнения сельскохозяйственного рабочего процесса. Например, несколько сельскохозяйственных рабочих модулей совместно работают друг с другом или несколько рабочих агрегатов внутри сельскохозяйственного рабочего модуля совместно работают в качестве функциональных единиц.
Под сельскохозяйственным рабочим модулем понимают передвижное или стационарное сельскохозяйственное устройство, используемое для выполнения сельскохозяйственного рабочего задания самостоятельно или совместно с другим сельскохозяйственным рабочим модулем. Сельскохозяйственный рабочий модуль в смысле изобретения представляет собой, в частности, сельскохозяйственную рабочую машину, например тягач, зерноуборочный комбайн, кормоуборочный комбайн или иную подобную машину. Кроме того, сельскохозяйственный рабочий модуль в смысле изобретения представляет собой, в частности, навесное оборудование для соединения с сельскохозяйственной рабочей машиной, в частности, плуг, культиватор, борону, косилку, пресс-подборщик или иное подобное оборудование. Вышеупомянутые сельскохозяйственные рабочие модули являются подвижными сельскохозяйственными рабочими модулями. По существу, сельскохозяйственным рабочим модулем может быть также стационарное сельскохозяйственное сооружение, в частности, зерносушилка, зернохранилище и т.п.
Существенное соображение заключается в том, что предложенная сельскохозяйственная рабочая система содержит центральную систему распознавания шаблонов, в которую передается информация о рабочей ситуации, и которая идентифицирует определенную рабочую ситуацию, в частности, путем сравнения и/или расчета, и передает ее в функциональные единицы сельскохозяйственной рабочей системы.
При этом следует отметить, что система распознавания шаблонов представляет собой централизованную систему, в равной степени доступную для всех функциональных единиц. Под «всеми» функциональными единицами понимают, независимо от их пригодности и доступности, все функциональные единицы, которые на момент передачи системой распознавания шаблонов информации о конкретной рабочей ситуации, в дальнейшем именуемой «метаинформацией», подключены к ней с возможностью передачи данных, то есть готовы к приему и находятся в диапазоне приема. Таким образом, метаинформация не обязательно передается только функциональным единицам, совместно работающим в идентифицированной рабочей ситуации, но может также передаваться другим функциональным единицам, служащим для выполнения других задач и потому неподходящим или выполняющим другие задачи и потому недоступным. Таким образом, система распознавания шаблонов выступает в качестве информационной системы более высокого порядка, централизованно собирающей и обрабатывающей информацию о рабочей ситуации. Кроме того, система распознавания шаблонов в качестве центрального устройства передает всем функциональным единицам информацию об идентифицированной рабочей ситуации.
Это сообщение об идентифицированной рабочей ситуации (метаинформация), переданное всем функциональным единицам, предпочтительно, ограничивается простым описанием идентифицированной рабочей ситуации и поэтому не содержит никаких рабочих инструкций. Соответственно, предпочтительно, метаинформация не содержит никаких параметров, наборов параметров или последовательностей параметров (параметров, изменяющихся со временем) для управления соответствующей функциональной единицей и/или никаких ссылок на параметры, наборы параметров или последовательности параметров, сохраненные в соответствующей функциональной единице и предназначенные для управления ею. Вместо этого функциональная единица содержит собственное управляющее устройство и, предпочтительно, собственный сохраненный набор правил, самостоятельно генерирующий соответствующие параметры, наборы параметров или последовательности параметров исключительно на основании полученного обозначения и/или описания идентифицированной рабочей ситуации и применяющий их для управления соответствующей функциональной единицей. Поэтому метаинформация, принятая функциональной единицей, предпочтительно, является простым триггером, запускающим внутреннюю настройку параметров в функциональной единице. По существу, метаинформация может также содержать дополнительные данные, что будет более подробно раскрыто ниже.
Кроме того, необходима координирование взаимодействия тех получающих метаинформацию функциональных единиц, которые работают вместе в идентифицированной рабочей ситуации. Координация достигается, в частности, посредством коммуникации, то есть обмена данными, непосредственно между соответствующими совместно работающими функциональными единицами, но может быть также достигнута посредством коммуникации между системой распознавания шаблонов, с одной стороны, и соответствующими совместно работающими функциональными единицами, с другой стороны.
В частности, в предложенном варианте сельскохозяйственная рабочая система содержит центральную систему распознавания шаблонов, выполненную с возможностью сохранения по меньшей мере одной сельскохозяйственной рабочей ситуации в качестве шаблона ситуации в системе распознавания шаблонов, передачи информации о рабочей ситуации в систему распознавания шаблонов, причем система распознавания шаблонов соотносит сохраненную рабочую ситуацию и связанный с ней шаблон ситуации на основании полученной информации о рабочей ситуации, и передает на функциональные единицы метаинформацию, характеризующую идентифицированную рабочую ситуацию; кроме того, система распознавания шаблонов и/или управляющие устройства нескольких функциональных единиц выполнены с возможностью координирования взаимодействия функциональных единиц, совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации с тем, чтобы управляющие устройства осуществляли соответствующую настройку параметров связанной с ними функциональной единицы. Предпочтительно, взаимодействие таких функциональных единиц координируется исключительно на основании обозначения и/или описания идентифицированной рабочей ситуации. В альтернативном варианте взаимодействие функциональных единиц может координироваться также с учетом дополнительных данных, передаваемых системой распознавания шаблонов на все функциональные единицы, что будет детально описано ниже.
Предложенная сельскохозяйственная рабочая система позволяет централизованно распознавать рабочие ситуации, причем информация о рабочей ситуации может быть получена из различных источников или подсистем, причем результат последующего процесса распознавания шаблонов может быть передан обратно в подсистемы в виде вышеупомянутой метаинформации. Это позволяет единообразно определять рабочую ситуацию, которую могут использовать и/или на которую могут влиять все подсистемы, так называемые функциональные единицы.
В варианте осуществления согласно пункту 2 координирование функциональных единиц, совместно работающих в идентифицированной рабочей ситуации, может осуществляться системой распознавания шаблонов и/или самими функциональными единицами, то есть их управляющими устройствами.
Пункт 3 определяет предпочтительное содержание метаинформации. В особенно предпочтительном варианте метаинформация содержит исключительно данные, относящиеся к обозначению и/или описанию рабочей ситуации. Кроме того, в следующем варианте осуществления в состав метаинформации могут также входить параметры, наборы или последовательности параметров и/или ссылки на сохраненные параметры, наборы или последовательности параметров. Эти дополнительные данные носят исключительно рекомендательный характер для соответствующего управляющего устройства, то есть в этом случае управляющее устройство самостоятельно определяет, будут ли эти дополнительные данные учитываться при настройке параметров. Также возможен вариант, в котором управляющее устройство при настройке параметров будет вынуждено учитывать дополнительные данные, то есть система распознавания шаблонов в этом случае будет «ведущим (главным) устройством».
В пункте 4 определены различные рабочие ситуации, которые могут быть идентифицированы системой распознавания шаблонов, и обозначение и/или описание которых может быть передано функциональным единицам в виде метаинформации. Такой рабочей ситуацией может быть, например, «Свободное кошение», «Уборка культуры вдоль полосы движения на поле», «Приближение к разворотной полосе», «Разворотная полоса», «Приближение к препятствию», «Сопровождение», «Перегрузка», «Уборка зерна», «Формирование тюков соломы» и/или «Подбор тюков соломы».
В пунктах 5 и 6 определены предпочтительные виды функциональных единиц, входящих в предложенную сельскохозяйственную рабочую систему и получающих метаинформацию из центральной системы распознавания шаблонов; на основании чего затем функциональные единицы напрямую координируют совместную работу, или система распознавания шаблонов координирует совместную работу функциональных единиц. Таким образом, функциональные единицы представляют собой, в частности, сельскохозяйственные рабочие модули или рабочие агрегаты сельскохозяйственного рабочего модуля. По существу, возможен также вариант, в котором одна из функциональных единиц является сельскохозяйственным рабочим модулем, а другая - рабочим агрегатом, а при необходимости другим сельскохозяйственным рабочим модулем.
В особо предпочтительном варианте осуществления согласно пункту 7 система распознавания шаблонов может принимать информацию о рабочей ситуации от датчиков отдельных или нескольких сельскохозяйственных рабочих модулей. В особенно предпочтительном варианте несколько сельскохозяйственных рабочих модулей, каждый из которых, в частности, образует функциональную единицу предложенной рабочей системы, передают в систему распознавания шаблонов один или несколько пакетов информации о рабочей ситуации. В качестве дополнения или альтернативы оператор может вводить информацию о рабочей ситуации. Система распознавания шаблонов получает особенно точную информацию о рабочей ситуации из множества различных источников, регистрирующих информацию о рабочей ситуации. Таким образом, можно свести к минимуму риск неправильной идентификации рабочей ситуации или соотносимого с ней шаблона ситуации, что удается сделать тем успешнее, чем детальнее информация о конкретной ситуации и чем больше функциональных единиц доступно для определения информации о рабочей ситуации, в частности, посредством датчиков.
Пункты 8 и 9 определяют предпочтительные варианты осуществления и функциональность системы распознавания шаблонов. В особенно предпочтительном варианте эта система, по меньшей мере частично, а в частности полностью, представляет собой облачную систему.
Пункты 10-12, в свою очередь, определяют предпочтительные варианты осуществления и функциональность функциональных единиц и, в частности, управляющее устройство этих функциональных единиц.
В особо предпочтительном варианте осуществления, раскрытом в пункте 13, информация о рабочей ситуации, передаваемая в систему распознавания шаблонов, содержит информацию из одного или нескольких уровней ситуации. Это позволяет получить информацию о рабочей ситуации, в частности относительно по меньшей мере одной основной рабочей ситуации, по меньшей мере одной вспомогательной рабочей ситуации, по меньшей мере одной ситуации привода, по меньшей мере одной ситуации машины, по меньшей мере одной ситуации безопасности, по меньшей мере одного уровня автоматики, по меньшей мере одной ситуации моделирования и/или по меньшей мере одной ситуации погрузки. Таким образом, содержание информации о рабочей ситуации, предпочтительно, структурировано, причем структура в особенно предпочтительном варианте содержит основные данные, то есть данные основной рабочей ситуации, и специфические данные, то есть данные, определяющие один или несколько следующих уровней ситуации.
В следующем предпочтительном варианте осуществления, раскрытом в пункте 14, обмен данными между системой распознавания шаблонов и соответствующей функциональной единицей и/или между функциональными единицами осуществляется в режиме реального времени. «Реальное время» в этом контексте имеет широкое толкование и означает, что прием данных или информации происходит в течение заданного периода времени с момента отправки и/или формирования данных, не превышающего получаса, предпочтительно, не превышающего нескольких секунд, например, составляющего максимум 30 секунд, особенно предпочтительно, не превышающего нескольких долей секунды, например, половины секунды.
В следующем предпочтительном варианте осуществления, раскрытом в пункте 15, сельскохозяйственная рабочая система может быть дополнена другими вышеописанными функциональными единицами, то есть может иметь модульную конструкцию.
Согласно следующему техническому решению, раскрытому в пункте 16 и имеющему самостоятельное значение, предложен способ оптимизации сельскохозяйственных рабочих процессов с использованием сельскохозяйственной рабочей системы, в частности, предложенной сельскохозяйственной рабочей системы. При этом предложено оснастить сельскохозяйственную рабочую систему центральной системой распознавания шаблонов, в которой в качестве образца ситуации сохранена по меньшей мере одна сельскохозяйственная рабочая ситуация, причем в систему распознавания шаблонов передается информация о рабочей ситуации, система распознавания шаблонов идентифицирует сохраненную рабочую ситуацию и соответствующий образец ситуации на основании полученной информации о рабочей ситуации и передает метаинформацию, характеризующую идентифицированную рабочую ситуацию, на несколько функциональных единиц, причем система распознавания шаблонов и/или управляющие устройства нескольких функциональных единиц координируют взаимодействие функциональных единиц, совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации таким образом, чтобы управляющие устройства выполнили соответствующие настройки параметров соответствующей функциональной единицы. Для данного способа действительны все варианты осуществления предложенной сельскохозяйственной рабочей системы.
Пункт 17 определяет особо предпочтительное использование способа в рабочей ситуации «Свободное кошение».
В предпочтительном варианте осуществления, раскрытом в пункте 18, информация о рабочей ситуации поступает в систему распознавания шаблонов с одного или нескольких устройств для регистрации информации о рабочей ситуации, в частности, с рабочих модулей, функциональных единиц, датчиков, устройств ввода и/или других устройств, при этом, предпочтительно, система распознавания шаблонов передает информацию о рабочей ситуации или соответствующую метаинформацию обратно на одно или несколько таких устройств, в частности, на все устройства.
Краткое описание чертежей
Изобретение детально рассмотрено ниже на примере вариантов осуществления, представленных на фигурах, на которых изображено:
Фигура 1: схематичное изображение предложенной сельскохозяйственной рабочей системы.
Фигура 2: схематичное изображение вариантов использования предложенной сельскохозяйственной рабочей системы.
Фигура 3: схематическое изображение осуществления связи между системой распознавания шаблонов и отдельными функциональными единицами предложенной сельскохозяйственной рабочей системы.
Осуществление изобретения
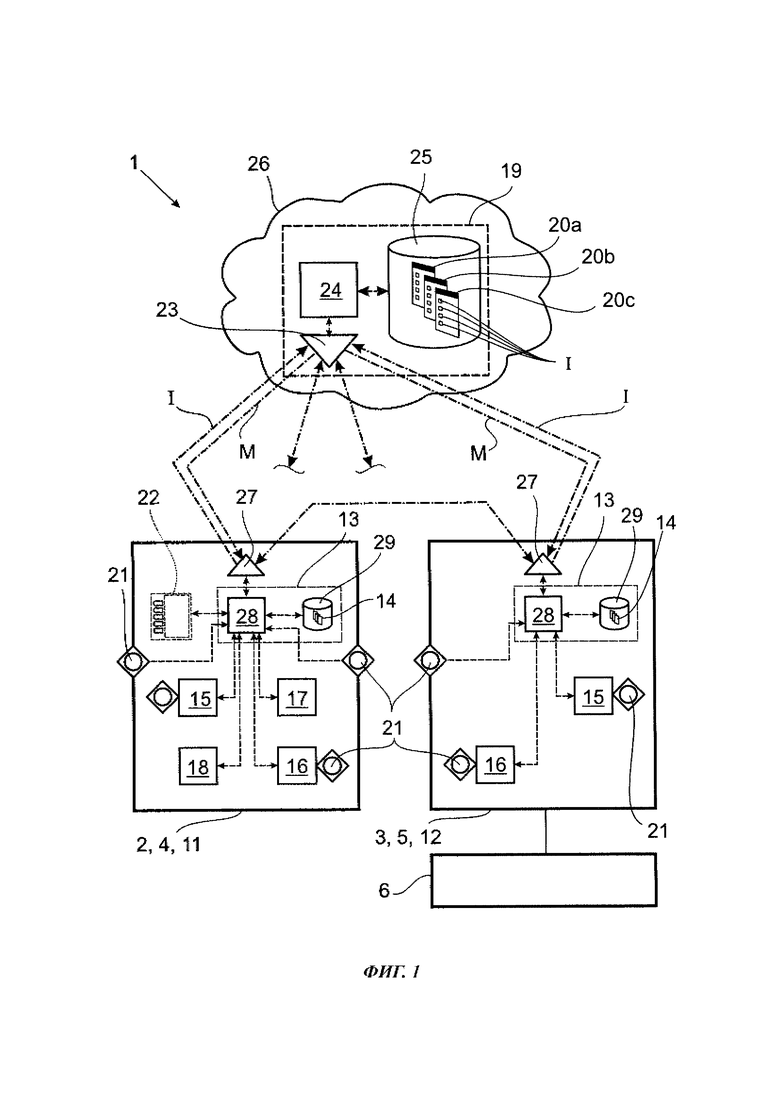
На фигуре 1 на примере одного из вариантов осуществления схематично изображена базовая структура предложенной сельскохозяйственной рабочей системы 1 для оптимизации сельскохозяйственных рабочих процессов. Сельскохозяйственная рабочая система 1 содержит по меньшей мере один сельскохозяйственный рабочий модуль 2, 3, в данном случае два сельскохозяйственных рабочих модуля 2, 3. В представленном варианте осуществления каждый из двух сельскохозяйственных рабочих модулей 2, 3 представляет собой сельскохозяйственную рабочую машину, например, зерноуборочный комбайн 4 внизу слева и, например, трактор 5 с транспортировочным прицепом 6 в качестве навесного оборудования внизу справа. Кроме того, сельскохозяйственный рабочий модуль 2, 3 может представлять собой навесное оборудование вместо сельскохозяйственной рабочей машины, например, плуг, культиватор, борону, косилку, пресс-подборщик 7 или иное подобное оборудование. В качестве дополнения или альтернативы сельскохозяйственным рабочим модулем 2, 3 в данном контексте может быть также стационарное сельскохозяйственное сооружение, в частности, зерносушилка 8, зернохранилище 9, мастерская 10 или иное подобное сооружение.
Предложенная сельскохозяйственная рабочая система 1 содержит несколько функциональных единиц 11, 12 для выполнения или поддержки сельскохозяйственной работы, каждая из которых содержит управляющее устройство 13 для управления соответствующей функциональной единицей 11, 12, в частности, на основании сохраненного набора 14 правил. В представленном варианте исполнения функциональные единицы 11, 12 идентичны сельскохозяйственным рабочим модулям 2, 3, то есть одна функциональная единица 11 образована зерноуборочным комбайном 4, а другая функциональная единица 12 - трактором 5. В данном случае и предпочтительно каждая функциональная единица 11, 12 содержит один или несколько рабочих агрегатов для выполнения или поддержки сельскохозяйственной работы. Под рабочими агрегатами в смысле изобретения понимают, в частности, ходовой привод 15 сельскохозяйственной рабочей машины, систему 16 рулевого управления сельскохозяйственной рабочей машины, рабочий агрегат для обработки убираемой культуры, в частности, жатку 17, молотилку и/или перегрузочное устройство 18, а также систему помощи водителю сельскохозяйственной рабочей машины, которая, в частности, управляет несколькими рабочими агрегатами во время выполнения сельскохозяйственных рабочих процессов и, в частности, содержит управляющее устройство 13.
В альтернативном варианте осуществления, не показанном на фигурах, навесное оборудование также может содержать рабочие агрегаты. Например, пресс-подборщик может содержать устройство для захвата убираемой культуры и устройство для прессования убираемой культуры. Кроме того, стационарное сельскохозяйственное сооружение может содержать рабочие агрегаты в качестве функциональной единицы. Например, зерносушилка может содержать устройство для подачи зерна и нагревательное устройство.
Кроме того, предложенная сельскохозяйственная рабочая система 1 содержит центральную систему 19 распознавания шаблонов. В системе 19 распознавания шаблонов сохранена по меньшей мере одна сельскохозяйственная рабочая ситуация в качестве шаблонов 20а, 20b, 20с ситуаций. В данном случае сохранено, например, три различных шаблона 20а, 20b, 20с ситуаций, каждый из которых описывает свою рабочую ситуацию. Под рабочей ситуацией в данном контексте понимают конкретную ситуацию, в которой необходимо выполнить определенный сельскохозяйственный рабочий процесс, являющийся частью рабочего задания. В качестве примеров, не носящих исчерпывающего характера, можно назвать рабочие ситуации при свободном кошении, уборке культуры вдоль полосы движения на поле, приближении к разворотной полосе, нахождении на разворотной полосе, приближении к какому-либо препятствию, сопровождении, например, с целью перегрузки, перегрузочной операции, уборке зерна, формирования и подбора тюков соломы. Каждая из этих рабочих ситуаций требует выполнения определенного рабочего процесса, который, в свою очередь, требует настройки параметров одного или нескольких рабочих агрегатов сельскохозяйственного рабочего модуля 2, 3, например, сельскохозяйственной рабочей машины. На фигуре 1 примерно и схематично изображен процесс перегрузки, при котором зерноуборочный комбайн 4 в качестве функциональной единицы 11 движется рядом с трактором 5, образующим дополнительную функциональную единицу 12 и сцепленным с транспортировочным прицепом 6, служащим навесным оборудованием для выгрузки зерна с зерноуборочного комбайна 4. В этой рабочей ситуации, например, соответствующее управляющее устройство 13 должно управлять соответствующим ходовым приводом 15 и соответствующей системой 16 рулевого управления. При этом необходимо скоординировать работу двух ходовых приводов 15 и двух систем 16 рулевого управления. Кроме того, в функциональной единице 11, образованной зерноуборочным комбайном 4, необходимо управлять, в частности, жаткой 17 и перегрузочным устройством 18. Движения двух этих устройств 17, 18 также необходимо скоординировать.
Для оптимизации необходимого в данной рабочей ситуации режима работы двух сельскохозяйственных рабочих модулей 2, 3, то есть в данном случае зерноуборочного комбайна 4 и трактора 5, в систему 19 распознавания шаблонов передаются несколько пакетов информации I, в частности множество пакетов информации I о рабочей ситуации. Под информацией I о рабочей ситуации понимают информацию или данные, относящиеся к предстоящей и/или выполняемой рабочей ситуации и/или подходящие для определения предстоящей и/или выполняемой рабочей ситуации. В данном случае и предпочтительно информация I о рабочей ситуации определяется непосредственно функциональными единицами 11, 12, а при необходимости - и другими функциональными единицами сельскохозяйственной рабочей системы 1 и передается в систему 19 распознавания шаблонов.
При этом система 19 распознавания шаблонов выполнена таким образом, чтобы она идентифицировала сохраненную рабочую ситуацию и связанный с ней шаблон 20а, 20b, 20с ситуации на основании полученной информации I о рабочей ситуации. В частности, система 19 распознавания шаблонов сравнивает полученную от отдельных источников информацию с сохраненными шаблонами 20а, 20b, 20с ситуации. Если на основании информации удалось идентифицировать подходящий шаблон 20а, 20b, 20с ситуации, то система 19 распознавания шаблонов передает метаинформацию М, характеризующую идентифицированную рабочую ситуацию, на несколько функциональных единиц 11, 12. Метаинформация М представляет собой сообщение об идентифицированной рабочей ситуации, которое в данном случае и предпочтительно ограничивается указанием на идентифицированную рабочую ситуацию в виде обозначения или описания рабочей ситуации и, соответственно, не содержит никаких рабочих инструкций. Соответственно, предпочтительно, метаинформация не содержит никаких параметров, наборов или последовательностей параметров (параметров, изменяющихся со временем) для управления соответствующей функциональной единицей и/или не содержит никаких ссылок на параметры, наборы или последовательности параметров, хранящиеся в соответствующей функциональной единице для управления ею. Напротив, в данном случае и предпочтительно функциональные единицы 11, 12 должны самостоятельно формировать соответствующие параметры, наборы или последовательности параметров для идентифицированной рабочей ситуации на основании переданной рабочей ситуации, то есть метаинформации М, и выполнять соответствующие настройки параметров.
В альтернативном варианте осуществления метаинформация М дополнительно к данным, обозначающим и/или описывающим рабочую ситуацию, содержит параметры, наборы или последовательности параметров для управления соответствующей функциональной единицей 11, 12 и/или ссылки на параметры, наборы или последовательности параметров, хранящиеся в соответствующей функциональной единице 11, 12 для управления ею.
Метаинформация М содержит, в частности, данные, обозначающие и/или описывающие рабочую ситуацию «Свободное кошение», «Уборка культуры вдоль полосы движения на поле», «Приближение к разворотной полосе», «Разворотная полоса», «Приближение к препятствию», «Сопровождение», «Перегрузка», «Уборка зерна», «Формирование тюков соломы» и/или «Подбор тюков соломы».
Следует отметить, что метаинформация М, генерируемая и передаваемая системой распознавания шаблонов 19, не обязательно передается только на две функциональные единицы 11, 12, работающие совместно в соответствующей рабочей ситуации, но может передаваться и на другие функциональные единицы сельскохозяйственной рабочей системы 1, что показано на фигуре 1 двумя стрелками, отходящими от системы 19 распознавания шаблонов и не ведущими ни к одной из показанных функциональных единиц. В частности, все функциональные единицы сельскохозяйственной рабочей системы 1 самостоятельно определяют, относится ли к ним принятая метаинформация М. Только в том случае, если метаинформация М относится к ним, в данном случае - к функциональным единицам 11, 12, соответствующее управляющее устройство 13 реагирует на полученную информацию.
Для этого в данном случае и предпочтительно управляющие устройства 13 нескольких функциональных единиц 11, 12 выполнены с возможностью координирования взаимодействия функциональных единиц 11, 12, совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации М. Во время такой координации управляющие устройства 13 соответствующим образом настраивают параметры соответствующих функциональных единиц 11, 12. Таким образом, метаинформация М в данном случае и предпочтительно является триггером, активирующим управляющие устройства 13, в результате чего последние формируют параметры, наборы и/или последовательности параметров и выполняют соответствующие настройки параметров. В качестве дополнения или альтернативы система 19 распознавания шаблонов может быть выполнена с возможностью координирования взаимодействия функциональных единиц 11, 12, совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации М. В этом случае управляющие устройства 13 также выполняют соответствующие настройки параметров соответствующих функциональных единиц 11, 12.
Как было указано выше, функциональные единицы 11, 12 могут представлять собой различные сельскохозяйственные рабочие модули 2, 3. Таким образом, функциональные единицы 11, 12 представляет собой, например, сельскохозяйственную рабочую машину, навесное оборудование, которое сцеплено или может быть сцеплено с сельскохозяйственной рабочей машиной, и/или стационарное сельскохозяйственное сооружение. В альтернативном варианте осуществления, не показанном на фигурах, функциональные единицы 11, 12 могут быть образованы различными рабочими агрегатами сельскохозяйственных рабочих модулей 2, 3. Например, функциональной единицей 11, 12 может быть ходовой привод 15 сельскохозяйственной рабочей машины, система 16 рулевого управления сельскохозяйственной рабочей машины, система помощи водителю сельскохозяйственной рабочей машины, рабочий агрегат для обработки убираемой культуры или стационарное сельскохозяйственное сооружение и/или рабочий агрегат для обработки убираемой культуры на навесном оборудовании.
В данном случае и предпочтительно система 19 распознавания шаблонов выполнена с возможностью приема одного или нескольких пакетов информации I о рабочей ситуации от датчиков 21 по меньшей мере одного сельскохозяйственного рабочего модуля 2, 3 или нескольких сельскохозяйственных рабочих модулей 2, 3. В данном случае опционально также предусмотрена возможность ввода оператором посредством устройства 22 ввода в сельскохозяйственный рабочий модуль 2, 3 информации I о рабочей ситуации, которая также принимается из системы 19 распознавания шаблонов.
В данном случае и предпочтительно для приема информации I о рабочей ситуации и передачи метаинформации М на функциональные единицы 11, 12 система 19 распознавания шаблонов содержит коммуникационный интерфейс 23. Кроме того, система 19 распознавания шаблонов содержит вычислительное устройство 24 для обработки принятой информации I о рабочей ситуации и память 25 данных, в которой хранятся шаблоны 20а, 20b, 20с ситуаций. В данном случае и предпочтительно вычислительное устройство 24 и память 25 данных являются частью облака 26, то есть предоставляются через Интернет. Поэтому в предпочтительном варианте система 19 распознавания шаблонов частично или полностью представляет собой облачную систему. Также возможно аппаратное исполнение этих компонентов, то есть их расположение в сельскохозяйственной рабочей машине, и/или стационарное исполнение, то есть фиксированное расположение, например, в центре обработки данных на сельскохозяйственном предприятии.
Предпочтительно, функциональные единицы 11, 12 также имеют коммуникационный интерфейс 27, также используемый для приема метаинформации М. Коммуникационный интерфейс 27 может быть выполнен с возможностью передачи информации о рабочей ситуации. В данном случае и предпочтительно коммуникационный интерфейс 27 выполнен с возможностью обмена данными с коммуникационным интерфейсом 27 другой функциональной единицы 11, 12, что позволяет непосредственно координировать совместную работу.
В данном случае и предпочтительно каждое управляющее устройство 13 функциональных единиц 11, 12 содержит микроконтроллер 28 для обработки соответствующей метаинформации М и память 29 данных, в которой хранится набор 14 правил. Набор 14 правил может содержать параметры, наборы и/или последовательности параметров по меньшей мере для одного рабочего агрегата сельскохозяйственного рабочего модуля 2, 3, каждому из которых назначена своя рабочая ситуация. Соответствующее управляющее устройство 13 может настраивать по меньшей мере один параметр, по меньшей мере один набор параметров и/или по меньшей мере одну последовательность параметров по меньшей мере для одной функциональной единицы 2, 3 на основании полученной метаинформации М и координировать по меньшей мере одну настройку по меньшей мере с одной настройкой другой функциональной единицы 11, 12 на основании той же метаинформации М.
Предпочтительно, информация I о рабочей ситуации структурирована и содержит информацию I о рабочей ситуации с одного или нескольких иерархически различающихся уровней Е, Е0, Е1 и т.д. Таким образом, можно определить и передать в систему 19 распознавания шаблонов информацию I о рабочей ситуации, относящуюся по меньшей мере к одной основной рабочей ситуации, по меньшей мере одной вспомогательной рабочей ситуации, по меньшей мере одной ситуации привода, по меньшей мере одной ситуации машины, по меньшей мере одной ситуации безопасности, по меньшей мере одной ситуации уровня автоматики, по меньшей мере одной ситуации моделирования и/или по меньшей мере одной ситуации погрузки.
Информация I о рабочей ситуации, относящаяся к основной рабочей ситуации или к рабочей ситуации уровня Е0 основной рабочей ситуации, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения подготовки рабочего задания и/или для определения окружающей среды (например, дороги, поля) и/или для определения рабочего задания (например, уборка зерна, обработка почвы и т.д.) в сельскохозяйственном рабочем модуле или в другом, в частности соседнем сельскохозяйственном рабочем модуле.
Информация I о рабочей ситуации, относящаяся к вспомогательной рабочей ситуации или к рабочей ситуации подчиненного уровня Е1 вспомогательной рабочей ситуации, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения подчиненной задачи (например, свободное кошение, уборка культуры вдоль полосы движения на поле, приближение к разворотной полосе, разворотная полоса, приближение к препятствию, сопровождение, перегрузка, уборка зерна, формирование тюков соломы и/или подбор тюков соломы) сельскохозяйственного рабочего модуля или другого, в частности соседнего сельскохозяйственного рабочего модуля.
Информация I о рабочей ситуации, относящаяся к ситуации привода или к рабочей ситуации следующего подчиненного уровня ситуации, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения состояния движения и/или ездового состояния (например, неподвижное, стационарное, вперед, назад) сельскохозяйственного рабочего модуля или другого, в частности, соседнего сельскохозяйственного рабочего модуля.
Информация I о рабочей ситуации, относящаяся к ситуации машины или к рабочей ситуации другого подчиненного уровня Е1 ситуации, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения состояния машины (например, главный агрегат «вкл», главный агрегат «выкл») сельскохозяйственного рабочего модуля или другого, в частности, соседнего сельскохозяйственного рабочего модуля.
Информация I о рабочей ситуации, относящаяся к ситуации безопасности или к рабочей ситуации другого подчиненного уровня ситуации, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения функциональной безопасности сельскохозяйственного рабочего модуля или другого, в частности, соседнего сельскохозяйственного рабочего модуля.
Информация I о рабочей ситуации, относящаяся к уровню автоматики или к рабочей ситуации другого подчиненного уровня, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения установленного режима движения или уровня режима движения (уровень 1: внутренние автоматические системы, уровень 2: автоматическая регулировка жатки, уровень 3: автоматическое управление движением по полю, уровень 4: дистанционное управление движением по полю, уровень 5: автономное движение по полю, уровень 6: автоматические системы управления движением по дороге) сельскохозяйственного рабочего модуля или другого, в частности, соседнего сельскохозяйственного рабочего модуля.
Информация I о рабочей ситуации, относящаяся к ситуации моделирования или к рабочей ситуации другого подчиненного уровня, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения моделирования рабочего задания.
Информация I о рабочей ситуации, относящаяся к ситуации погрузки или рабочей ситуации другого подчиненного уровня, может содержать по меньшей мере одну информацию I о рабочей ситуации для определения статуса загрузки (например, емкость исчерпана, емкость доступна полностью) сельскохозяйственного рабочего модуля или другого, в частности, соседнего сельскохозяйственного рабочего модуля.
Обмен данными между системой 19 распознавания шаблонов и соответствующими функциональными единицами 11, 12 и/или обмен данными между функциональными единицами 11, 12 в данном случае и предпочтительно происходит в режиме реального времени. В особенно предпочтительном варианте обмен данными выполняется по беспроводным каналам.
В данном случае и предпочтительно предложенная сельскохозяйственная рабочая система 1 может быть модульно расширена дополнительными функциональными единицами (не показанными на фигурах) для выполнения или поддержки сельскохозяйственной работы. Каждая из дополнительных функциональных единиц по структуре и функциональности может соответствовать вышеописанным функциональным единицам 11, 12.
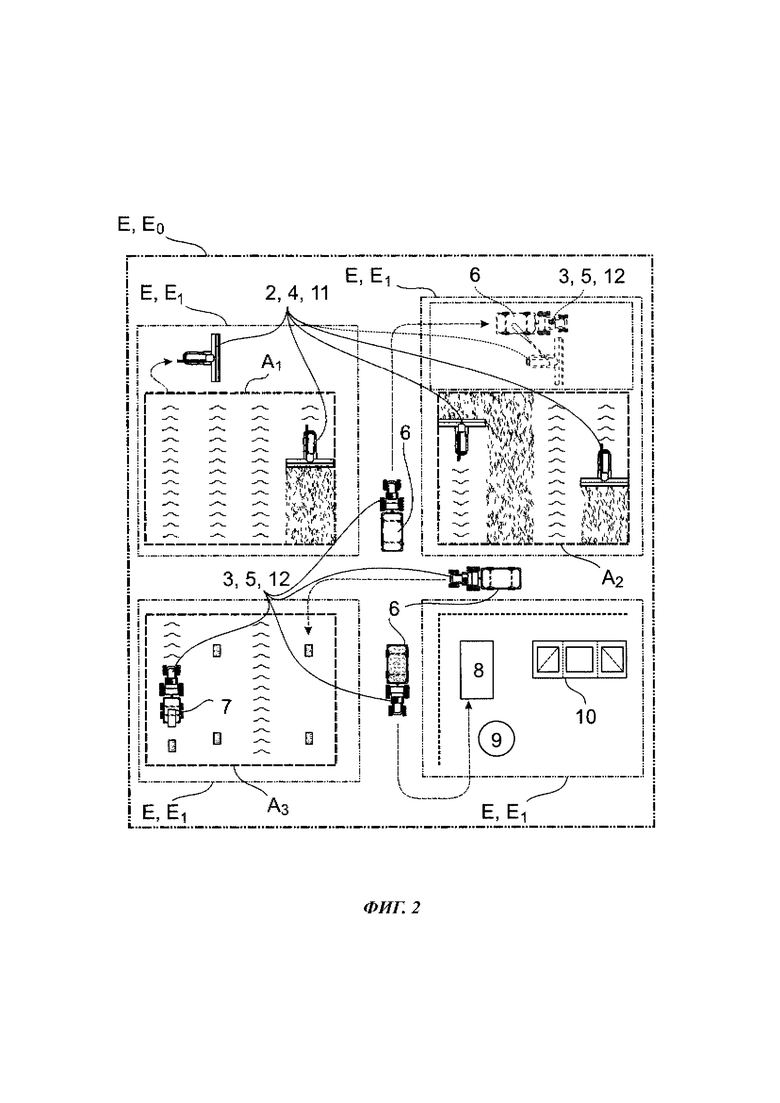
На фигуре 2 изображена предложенная сельскохозяйственная рабочая система 1 для уборки зерна и выполнения соответствующих подчиненных задач, в частности, уборки культуры вдоль полосы движения на поле, перегрузки, сбора зерна на ферме и формирования тюков соломы.
В правом нижнем углу фигуры 2 схематично изображено сельскохозяйственное предприятие, имеющее зерносушилку 8, зернохранилище 9 и мастерскую 10. Собственно сельскохозяйственное предприятие и его стационарные структурные подразделения (зерносушилка 8, зернохранилище 9 и мастерские 10) образуют стационарные функциональные единицы 11, 12 предложенной сельскохозяйственной рабочей системы 1.
Сельскохозяйственное предприятие связано с множеством обрабатываемых площадей, в данном случае посевных площадей A1, А2, А3, сетью дорог и путей разного качества.
На первой площади A1 уборкой урожая занимаются две сельскохозяйственные рабочие машины, выполненные в виде зерноуборочных комбайнов 4, причем один комбайн 4 движется по полю, а другой комбайн 4 - по разворотной полосе. Оба зерноуборочных комбайна 4 образуют в данном случае мобильные функциональные единицы 11, 12 предложенной сельскохозяйственной рабочей системы 1. Зерноуборочные комбайны 4 до процесса перегрузки хранят собранную культуру, в данном случае зерновую культуру, в своем бункере обычным порядком, в то время как солома, отделенная в процессе уборки культуры, укладывается валком на посевную площадь A1 сзади зерноуборочного комбайна 4.
На другой посевной площади А2, в частности, одновременно или в другое время работают две другие сельскохозяйственные рабочие машины, выполненные в виде зерноуборочного комбайна 4. Эти комбайны 4 образуют следующие, в данном случае мобильные функциональные единицы 11, 12 предложенной сельскохозяйственной рабочей системы 1. Таким образом, представленная схема обработки посевных площадей А1, А2 отражает типичное использование зерноуборочных комбайнов 4 при уборке культуры, так как по соображениям экономии на больших посевных площадях А1, А2 несколько сельскохозяйственных машин часто совместно выполняют сельскохозяйственное рабочее задание. При этом на фигуре 2 выше для посевной площади А2 показан возможный процесс перегрузки между одним из зерноуборочных комбайнов 4 и комбинацией из тягача 5 и транспортировочного прицепа 6.
Кроме того, показана следующая посевная площадь А3, на которой, например, одновременно или в другое время пресс-подборщик 7, прицепленный к трактору 5, спрессовывает в тюки убранную культуру, выложенную в валки. Трактор 5 образует еще одну, в данном случае мобильную функциональную единицу 11, 12 предложенной сельскохозяйственной рабочей системы 1.
Наконец, показаны другие комбинации тягача 5 и транспортировочного прицепа 6, которые движутся по сети дорог и путей с целью погрузки или разгрузки убранной культуры и в двух случаях опорожняются, а в одном - заполняются. Каждый из этих тракторов 5 образует следующую, в данном случае мобильную функциональную единицу 11, 12 предложенной сельскохозяйственной рабочей системы 1.
Каждая из ситуаций, схематично изображенных на фигуре 2 и описанных выше, представляет собой в предложенном смысле сельскохозяйственную рабочую ситуацию. При этом каждая из этих рабочих ситуаций соответствует шаблону 20а, 20b, 20с ситуаций, который хранится в центральной системе 19 распознавания шаблонов, и который система 19 распознавания шаблонов может идентифицировать на основании принятой информации I о рабочей ситуации. После идентификации определенного шаблона 20а, 20b, 20с ситуаций и соответствующей идентифицированной рабочей ситуации система 19 распознавания шаблонов передает метаинформацию М, характеризующую идентифицированную рабочую ситуацию, на функциональные единицы 11, 12, как показано на фигуре 2.
Например, выгрузка зерна на зерносушилку 8 определяется как рабочая ситуация для сельскохозяйственного предприятия (шаблон ситуации «сбор зерна»). Для первой посевной площади А1 например, уборка культуры вдоль полосы движения на поле, в данном случае зерновом поле, определяется как рабочая ситуация (шаблон ситуации «уборка культуры вдоль полосы движения на поле». Для второй посевной площади А2 рабочей ситуацией определяется, например, перегрузка собранной культуры, в данном случае зерновых (модель ситуации «перегрузка»). Для третьей посевной площади А3 рабочей ситуацией определяется, например, прессование тюков, в данном случае рулонов (шаблон ситуации «формирование тюков соломы»).
Как было указано выше, информация I о рабочей ситуации, передаваемая в систему 19 распознавания шаблонов, содержит, в частности, информацию с нескольких уровней Е, Е0, E1 и др. ситуации. Например, информация I о рабочей ситуации содержит по меньшей мере информацию об основной и вспомогательной рабочей ситуации. В системе 19 распознавания шаблонов основной рабочей ситуации назначается, например, более высокоуровневый глобальный шаблон ситуации «Уборка зерна». В системе 19 распознавания шаблонов шаблонам ситуаций «Уборка культуры вдоль полосы движения на поле», «Перегрузка», «Уборка зерна» и «Формирование тюков соломы» назначен уровень вспомогательной рабочей ситуации, что, впрочем, является лишь примером и не носит ограничивающего характера.
В данном случае и предпочтительно все функциональные единицы 11, 12, изображенные на фиг. 2, или их управляющие устройства 13 выполнены таким образом, чтобы управляющие устройства 13 функциональных единиц 11, 12, совместно работающие в идентифицированной рабочей ситуации, координировали свою совместную работу на основании полученной метаинформации М и выполняли настройку параметров соответствующих функциональных единиц 11, 12.
Например, на основании шаблона ситуации «Перегрузка» управляющие устройства 13 каждой функциональной единицы 11, 12 выполняют, в том числе, настройку параметров ходового привода 15 и системы 16 рулевого управления таким образом, чтобы комбайн 4 и трактор 5 встречались друг с другом в оптимальное время и в оптимальной ориентации друг относительно друга. Остальные функциональные единицы 11, 12 также получают метаинформацию М, но самостоятельно определяют, что находятся в иной рабочей ситуации и, соответственно, не реагируют на метаинформацию М.
В следующем варианте осуществления оператор, используя устройство 22 ввода первого рабочего модуля 2, 3, выполненного в виде зерноуборочного комбайна, в качестве информации I о рабочей ситуации вводит рабочую ситуацию «Свободное кошение». Далее эта информация I о рабочей ситуации передается в систему 19 распознавания шаблонов, которая идентифицирует сохраненную рабочую ситуацию «Свободное кошение» и связанный с ней шаблон 20а, 20b, 20с ситуации на основании полученной информации о рабочей ситуации. Далее система 19 распознавания шаблонов генерирует и передает метаинформацию М, характеризующую идентифицированную рабочую ситуацию «Свободное кошение», всем последующим рабочим модулям 2, 3 сельскохозяйственной рабочей системы 1, каждый из которых образует функциональную единицу 11, 12, в частности по меньшей мере одному следующему зерноуборочному комбайну и по меньшей мере одному разгрузочному транспортному средству.
Взаимодействие рабочих модулей 2, 3, совместно работающих в рабочей ситуации «Свободное кошение», координируется на основании метаинформации М, для чего в первом рабочем модуле 2, 3, выполненном в виде зерноуборочного комбайна, выставляются параметры, предусмотренные для рабочей ситуации «Свободное кошение», и/или для чего в качестве следующего рабочего модуля 2, 3 для рабочей ситуации «Свободное кошение» запрашивается дополнительный зерноуборочный комбайн и/или для чего в качестве следующего рабочего модуля 2, 3 для рабочей ситуации «Перегрузка», следующей за рабочей ситуацией «Свободное кошение», запрашивается разгрузочное транспортное средство.
Предложенная сельскохозяйственная рабочая система, как было сказано выше, по существу, выполнена с возможностью передачи одного или нескольких пакетов информации I о рабочей ситуации в систему 19 распознавания шаблонов от одного или нескольких устройств, регистрирующих информацию I о рабочей ситуации. В особенно предпочтительном варианте осуществления в систему 19 распознавания шаблонов передается информация I о рабочей ситуации с одного или нескольких рабочих модулей 2, 3, одной или нескольких функциональных единиц 11, 12, одного или нескольких датчиков 21 по меньшей мере одного из рабочих модулей 2, 3, одного или нескольких устройств 22 для ввода оператором информации I о рабочей ситуации и/или одного или нескольких других устройств для регистрации информации I о рабочей ситуации. В данном случае и предпочтительно система 19 распознавания шаблонов передает полученную информацию I о рабочей ситуации и/или метаинформацию М, сгенерированную на ее основе системой 19 распознавания шаблонов, обратно на одно или несколько таких устройств, в частности, на все устройства.
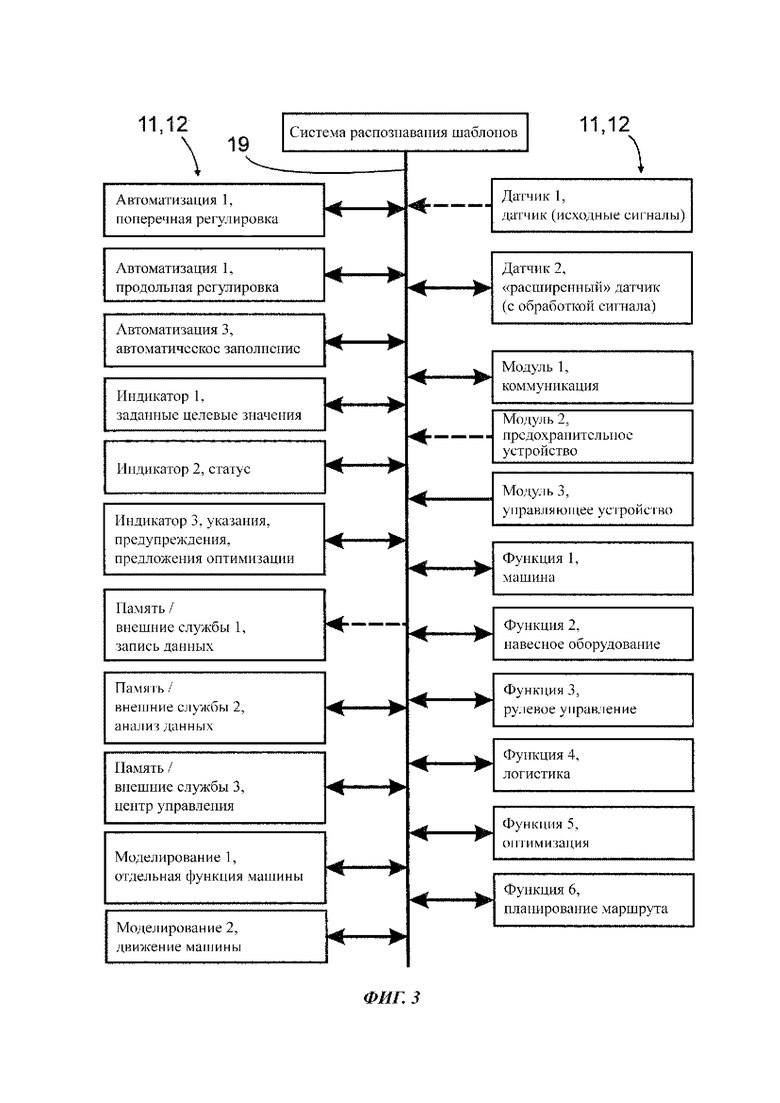
Наконец, на фигуре 3 схематично показана связь между системой 19 распознавания шаблонов и отдельными функциональными единицами 11, 12 предложенной сельскохозяйственной рабочей системы 1. Для некоторых функциональных единиц 11, 12 связь является двусторонней (показана двойной стрелкой), то есть возможна в обоих направлениях между системой 19 распознавания шаблонов и функциональными единицами 11, 12. Для других функциональных единиц 11, 12 связь является односторонней (показана одинарной стрелкой), то есть либо только от системы 19 распознавания шаблонов к функциональным единицам 11, 12, либо только от функциональных единиц 11, 12 к системе 19 распознавания шаблонов. Дополнительные каналы связи показаны штриховыми линиями.
С левой стороны в качестве примеров функциональных единиц 11,12 сверху вниз показаны: блок поперечной регулировки, блок продольной регулировки, блок «Автозаполнение», дисплей для отображения заданных значений, дисплей для отображения состояния, дисплей для отображения указаний, предупреждений и/или предложений оптимизации, память (опционально) или внешние службы записи данных, память или внешние службы анализа данных, память или внешние службы в качестве центра управления, блок моделирования отдельных функций машины, а также блок моделирования движений машины.
С правой стороны в качестве примеров других функциональных единиц 11, 12 сверху вниз показаны: блок датчика по меньшей мере с одним датчиком для формирования исходных сигналов, блок датчика по меньшей мере с одним датчиком с обработкой сигнала, коммуникационный модуль, модуль в форме управляющего устройства, функциональный модуль в форме машины, функциональный модуль в форме навесного оборудования, функциональный модуль в форме модуля рулевого управления, функциональный модуль в форме модуля логистики, функциональный модуль в форме модуля оптимизации (англ. Precision Applications), например, в форме автоматического переключения распределения ширины (англ. Section Control) или переменного регулирования нормы внесения (англ. Variable Rate Control), а также функциональный модуль в форме модуля планирования маршрута.
Список ссылочных обозначений
1 - сельскохозяйственная рабочая система
2 - сельскохозяйственный рабочий модуль
3 - сельскохозяйственный рабочий модуль
4 - зерноуборочный комбайн
5 - трактор
6 - транспортировочный прицеп
7 - пресс-подборщик
8 - зерносушилка
9 - зернохранилище
10 - мастерская
11 - функциональная единица
12 - функциональная единица
13 - управляющее устройство
14 - набор правил
15 - ходовой привод
16 - система рулевого управления
17 - жатка
18 - перегрузочное устройство
19 - система распознавания шаблонов
20а, 20b, 20с - шаблоны ситуаций
21 - датчик
22 - устройство ввода
23 - коммуникационный интерфейс
24 - вычислительное устройство
25 - память данных
26 - облако
27 - коммуникационный интерфейс
28 - микроконтроллер
29 - память данных
A1, A2, А3 - посевные площади
I - информация о рабочей ситуации
М - метаинформация
Е, Е0, E1 - уровни ситуации
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2017 |
|
RU2736730C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ ЭКСПЛУАТАЦИИ ТАКОЙ МАШИНЫ | 2013 |
|
RU2627204C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНОЙ | 2016 |
|
RU2746813C2 |
| СИСТЕМА "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2533922C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2015 |
|
RU2676959C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЗАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 2009 |
|
RU2498549C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВОМ ДЕТЕКТИРОВАНИЯ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2016 |
|
RU2731733C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566990C9 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566658C9 |
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2477038C2 |
Группа изобретений относится к сельскому хозяйству. Сельскохозяйственная рабочая система для оптимизации сельскохозяйственных рабочих процессов и способ оптимизации сельскохозяйственных рабочих процессов с использованием сельскохозяйственной рабочей системы, содержит по меньшей мере один сельскохозяйственный рабочий модуль, в частности сельскохозяйственную рабочую машину и/или стационарное сельскохозяйственное сооружение. Сельскохозяйственная рабочая система содержит функциональные единицы для выполнения или поддержки сельскохозяйственной работы, каждая из которых содержит управляющее устройство для управления соответствующей функциональной единицей на основании сохраненного набора правил. Сельскохозяйственная рабочая система содержит центральную систему распознавания шаблонов, выполненную с возможностью сохранения по меньшей мере одной сельскохозяйственной рабочей ситуации в качестве шаблона ситуации в системе распознавания шаблонов и передачи информации о рабочей ситуации в систему распознавания шаблонов. Система распознавания шаблонов выполнена с возможностью идентификации сохраненной рабочей ситуации и связанного с ней шаблона ситуации на основании полученной информации о рабочей ситуации и передачи на функциональные единицы метаинформации, характеризующей идентифицированную рабочую ситуацию. Система распознавания шаблонов и/или управляющие устройства функциональных единиц выполнены с возможностью координирования взаимодействия функциональных единиц, совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации таким образом, чтобы управляющие устройства осуществляли соответствующие настройки параметров связанной с ними функциональной единицы. Обеспечивается оптимизация совместной работы нескольких функциональных единиц сельскохозяйственной рабочей системы при выполнении сельскохозяйственных рабочих процессов. 2 н. и 16 з.п. ф-лы, 3 ил.
1. Сельскохозяйственная рабочая система для оптимизации сельскохозяйственных рабочих процессов, содержащая по меньшей мере один сельскохозяйственный рабочий модуль (2, 3), в частности сельскохозяйственную рабочую машину и/или стационарное сельскохозяйственное сооружение, причем сельскохозяйственная рабочая система (1) содержит функциональные единицы (11, 12) для выполнения или поддержки сельскохозяйственной работы, каждая из которых содержит управляющее устройство (13) для управления соответствующей функциональной единицей (11, 12) на основании сохраненного набора (14) правил, отличающаяся тем, что сельскохозяйственная рабочая система (1) содержит центральную систему (19) распознавания шаблонов, выполненную с возможностью сохранения по меньшей мере одной сельскохозяйственной рабочей ситуации в качестве шаблона (20a, 20b, 20c) ситуации в системе (19) распознавания шаблонов, передачи информации (I) о рабочей ситуации в систему (19) распознавания шаблонов, причем система (19) распознавания шаблонов выполнена с возможностью идентификации сохраненной рабочей ситуации и связанного с ней шаблона (20a, 20b, 20c) ситуации на основании полученной информации (I) о рабочей ситуации и передачи на функциональные единицы (11, 12) метаинформации (M), характеризующей идентифицированную рабочую ситуацию; причем система (19) распознавания шаблонов и/или управляющие устройства (13) функциональных единиц (11, 12) выполнены с возможностью координирования взаимодействия функциональных единиц (11, 12), совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации (M) таким образом, чтобы управляющие устройства (13) осуществляли соответствующие настройки параметров связанной с ними функциональной единицы (11, 12).
2. Сельскохозяйственная рабочая система по п. 1, отличающаяся тем, что система (19) распознавания шаблонов выполнена с возможностью координирования взаимодействия функциональных единиц (11, 12), совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации (M), причем управляющие устройства (13) этих функциональных единиц (11, 12) выполнены с возможностью осуществления соответствующих настроек параметров связанной с ними функциональной единицы (11, 12), и/или
управляющие устройства (13) функциональных единиц (11, 12), совместно работающих в идентифицированной рабочей ситуации, выполнены с возможностью координирования взаимодействия этих функциональных единиц (11, 12) друг с другом на основании полученной метаинформации (M) и осуществления соответствующих настроек параметров связанной с ними функциональной единицы (11, 12).
3. Сельскохозяйственная рабочая система по п. 1 или 2, отличающаяся тем, что метаинформация (M) содержит данные, относящиеся к обозначению и/или описанию рабочей ситуации, причем предпочтительно, метаинформация (M) содержит данные, относящиеся исключительно к обозначению и/или описанию рабочей ситуации, или метаинформация (M), в дополнение к данным, относящимся к обозначению и/или описанию рабочей ситуации, содержит параметры, наборы параметров или последовательности параметров для управления соответствующей функциональной единицей (11, 12) и/или ссылки на сохраненные в соответствующей функциональной единице (11, 12) параметры, наборы параметров или последовательности параметров для управления соответствующей функциональной единицей (11, 12).
4. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что метаинформация (M) содержит данные, относящиеся к обозначению и/или описанию рабочей ситуации «Свободное кошение», рабочей ситуации «Уборка культуры вдоль полосы движения на поле», рабочей ситуации «Приближение к разворотной полосе», рабочей ситуации «Разворотная полоса», рабочей ситуации «Приближение к препятствию», рабочей ситуации «Сопровождение», рабочей ситуации «Перегрузка», рабочей ситуации «Уборка зерна», рабочей ситуации «Формирование тюков соломы» и/или рабочей ситуации «Подбор тюков соломы».
5. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что функциональные единицы (11, 12) образованы сельскохозяйственными рабочими модулями (2, 3), причем предпочтительно, по меньшей мере одна функциональная единица (11, 12) представляет собой сельскохозяйственную рабочую машину, и/или по меньшей мере одна функциональная единица (11, 12) представляет собой навесное оборудование, сцепленное или выполненное с возможностью сцепления с сельскохозяйственной рабочей машиной, и/или по меньшей мере одна функциональная единица (11, 12) представляет собой стационарное сельскохозяйственное сооружение.
6. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что функциональные единицы (11, 12) образованы рабочими агрегатами сельскохозяйственного рабочего модуля (2, 3), причем предпочтительно, функциональная единица (11, 12) представляет собой ходовой привод (15) сельскохозяйственной рабочей машины, и/или функциональная единица (11, 12) представляет собой систему (16) рулевого управления сельскохозяйственной рабочей машины, и/или функциональная единица (11, 12) представляет собой систему помощи оператору сельскохозяйственной рабочей машины, и/или функциональная единица (11, 12) представляет собой рабочий агрегат сельскохозяйственной рабочей машины или стационарного сельскохозяйственного сооружения, обрабатывающий убираемую культуру, и/или функциональная единица (11, 12) представляет собой рабочий агрегат навесного оборудования, обрабатывающий убираемую культуру.
7. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что система (19) распознавания шаблонов выполнена с возможностью приема одного или более пакетов информации (I) о рабочей ситуации от датчиков (21) по меньшей мере одного сельскохозяйственного рабочего модуля (2, 3) и/или приема информации (I) о рабочей ситуации, введенной оператором посредством устройства (22) ввода сельскохозяйственного рабочего модуля (2, 3).
8. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что система (19) распознавания шаблонов содержит коммуникационный интерфейс (23) для приема информации (I) о рабочей ситуации и для передачи метаинформации (М) и/или вычислительное устройство (24) для обработки информации (I) о рабочей ситуации, а также память (25) данных, в которой сохранен по меньшей мере один шаблон (20a, 20b, 20c) ситуации.
9. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что система (19) распознавания шаблонов представляет собой, частично или полностью, облачную систему и/или реализована на стороне машины и/или в виде стационарного сооружения.
10. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что каждая функциональная единица (11, 12) содержит коммуникационный интерфейс (27) для приема метаинформации (М), причем коммуникационный интерфейс (27) выполнен, в частности, с возможностью передачи информации (I) о рабочей ситуации и/или обмена данными с коммуникационным интерфейсом (27) другой функциональной единицы (11, 12).
11. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что каждое управляющее устройство (13) функциональной единицы (11, 12) содержит микроконтроллер (28) для обработки соответствующей метаинформации (М) и память (29) данных, в которой сохранен набор (14) правил.
12. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что набор (14) правил содержит параметры, наборы параметров и/или последовательности параметров по меньшей мере для одного рабочего агрегата сельскохозяйственного рабочего модуля (2, 3), назначенные рабочим ситуациям, причем соответствующее управляющее устройство (13) выполнено с возможностью настройки по меньшей мере одного параметра, по меньшей мере одного набора параметров и/или по меньшей мере одной последовательности параметров по меньшей мере одного рабочего агрегата сельскохозяйственного рабочего модуля (2, 3) на основании полученной метаинформации (М) и координирования по меньшей мере одной настройки по меньшей мере с одной настройкой другой функциональной единицы (11, 12) на основании той же метаинформации (М).
13. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что информация (I) о рабочей ситуации содержит информацию из одного или более уровней (Е, Е0, Е1) ситуации, причем информация (I) о рабочей ситуации в каждом случае содержит по меньшей мере одну информацию, относящуюся по меньшей мере к одной основной рабочей ситуации, по меньшей мере к одной вспомогательной рабочей ситуации, по меньшей мере к одной ситуации привода, по меньшей мере к одной ситуации машины, по меньшей мере к одной ситуации безопасности, по меньшей мере к одному уровню автоматики, по меньшей мере к одной ситуации моделирования и/или по меньшей мере к одной ситуации погрузки.
14. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что обмен данными между системой (19) распознавания шаблонов и соответствующей функциональной единицей (11, 12) и/или между функциональными единицами (11, 12) предусмотрен в режиме реального времени.
15. Сельскохозяйственная рабочая система по одному из предыдущих пунктов, отличающаяся тем, что сельскохозяйственная рабочая система (1) является модульно расширяемой дополнительными функциональными единицами (11, 12) для выполнения или поддержки сельскохозяйственной работы, каждая из которых содержит управляющее устройство (13) для управления соответствующей функциональной единицей (11, 12) на основании сохраненного набора (14) правил и выполнена с возможностью приема метаинформации (М), характеризующей рабочую ситуацию, идентифицированную системой (19) распознавания шаблонов, причем управляющее устройство (13) соответствующей дополнительной функциональной единицы (11, 12) и управляющее устройство (13) другой функциональной единицы (11, 12), совместно работающей с соответствующей дополнительной функциональной единицей (11, 12) в идентифицированной рабочей ситуации, выполнены с возможностью координирования их совместной работы на основании полученной метаинформации (М) и осуществления настроек параметров связанной с ними функциональной единицы (11, 12).
16. Способ оптимизации сельскохозяйственных рабочих процессов с использованием сельскохозяйственной рабочей системы (1), в частности сельскохозяйственной рабочей системы (1) по одному из предыдущих пунктов, содержащей по меньшей мере один сельскохозяйственный рабочий модуль (2,3), в частности сельскохозяйственную рабочую машину и/или стационарное сельскохозяйственное сооружение, причем сельскохозяйственная рабочая система (1) содержит функциональные единицы (11, 12) для выполнения или поддержки сельскохозяйственной работы, каждая из которых содержит управляющее устройство (13) для управления соответствующей функциональной единицей (11, 12) на основании сохраненного набора (14) правил,
отличающийся тем, что
сельскохозяйственная рабочая система содержит центральную систему (19) распознавания шаблонов, в которой в качестве шаблона (20a, 20b, 20c) ситуации сохранена по меньшей мере одна сельскохозяйственная рабочая ситуация, причем в систему (19) распознавания шаблонов передают информацию (I) о рабочей ситуации, при этом система (19) распознавания шаблонов идентифицирует сохраненную рабочую ситуацию и связанный с ней шаблон (20a, 20b, 20c) ситуации на основании полученной информации (I) о рабочей ситуации и передает метаинформацию (M), характеризующую идентифицированную рабочую ситуацию, на функциональные единицы (11, 12),
причем система (19) распознавания шаблонов и/или управляющие устройства (13) функциональных единиц (11, 12) координируют взаимодействие функциональных единиц (11, 12), совместно работающих в идентифицированной рабочей ситуации, на основании метаинформации (М) таким образом, чтобы управляющие устройства (13) осуществляли соответствующие настройки параметров связанной с ними функциональной единицы (11, 12).
17. Способ по п. 16, отличающийся тем, что оператор посредством устройства (22) ввода первого рабочего модуля (2, 3), выполненного в виде зерноуборочного комбайна, в качестве информации (I) о рабочей ситуации задает рабочую ситуацию «Свободное кошение»,
причем эту информацию (I) о рабочей ситуации передают в систему (19) распознавания шаблонов,
причем система (19) распознавания шаблонов идентифицирует сохраненную рабочую ситуацию «Свободное кошение» и связанный с ней шаблон (20a, 20b, 20c) ситуации на основании полученной информации (I) о рабочей ситуации и передает метаинформацию (М), характеризующую идентифицированную рабочую ситуацию «Свободное кошение», на все последующие рабочие модули (2, 3) сельскохозяйственной рабочей системы (1), каждый из которых образует функциональную единицу (11, 12),
причем взаимодействие рабочих модулей (2, 3), совместно работающих в рабочей ситуации «Свободное кошение», координируют на основании метаинформации (М) таким образом, что в первом рабочем модуле (2, 3), выполненном в виде зерноуборочного комбайна, осуществляют настройки параметров, специально предусмотренные для рабочей ситуации «Свободное кошение», и/или
таким образом, что в качестве следующего рабочего модуля (2, 3) для рабочей ситуации «Свободное кошение» запрашивают следующий зерноуборочный комбайн, и/или
таким образом, что в качестве следующего рабочего модуля (2, 3) для рабочей ситуации «Перегрузка», следующей за рабочей ситуацией «Свободное кошение», запрашивают разгрузочное транспортное средство.
18. Способ по п. 16 или 17, отличающийся тем, что в систему (19) распознавания шаблонов передают один или более пакетов информации (I) о рабочей ситуации с одного или более рабочих модулей (2, 3), одной или более функциональных единиц (11, 12), одного или более датчиков (21) по меньшей мере одного из рабочих модулей (2, 3), одного или более устройств (22) ввода для ввода оператором информации (I) о рабочей ситуации и/или одного или более других устройств для регистрации информации (I) о рабочей ситуации, причем предпочтительно, система (19) распознавания шаблонов передает полученную
информацию (I) о рабочей ситуации и/или метаинформацию (M), сгенерированную
на ее основе системой (19) распознавания шаблонов, обратно на одно или более
таких устройств, в частности, на все устройства.
| US 2016183447 A1, 30.06.2016 | |||
| US 9046895 B2, 02.06.2015 | |||
| EP 1619517 B1, 05.06.2013 | |||
| DE 4322293 A1, 12.01.1995 | |||
| DE 102004043169 A1, 09.03.2006 | |||
| US 2018129987 A1, 10.05.2018 | |||
| US 2014129048 A1, 08.05.2014. |

