Область техники
Настоящее изобретение относится к сельскохозяйственной рабочей машине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Сельскохозяйственные рабочие машины, к которым, в частности, относятся самоходные уборочные машины, такие как зерноуборочные комбайны, обычно бывают оснащены различными рабочими аппаратами, которые при обработке убранной массы могут эксплуатироваться с переменными параметрами. Настройка этих параметров обозначается также как настройка машинных параметров. Для оптимальной эксплуатации рекомендуется производить настройку машинных параметров в зависимости от различных граничных условий, к которым относятся, в частности, вид, количество и характер растительности на поле или убранной массы.
Важным таким граничным условием является влажность убранной массы в ее потоке, которая определяется влажностью соломы. Точное определение влажности убранной массы может оказывать большую помощь в оптимальной настройке машинных параметров.
Из уровня техники известно, с одной стороны определение влажности зернового материала после того, как зерно отделено от остальной убранной массы. Однако влажность зернового материала не всегда дает достаточно точную информацию о влажности убранной массы, так как она, как правило, не представляет определяющую величину влажности убранной массы.
Из решения по патентному документу ЕР 1576869, которое является ближайшим техническим решением для настоящего изобретения, известно определение влажности убранной массы с помощью датчика влажности, расположенного в приемном канале зерноуборочного комбайна. При этом влажность убранной массы может определяться непрерывно и близко по времени к ее приему, так что можно на нее реагировать соответствующим образом.
Недостаток этого решения уровня техники заключается в том, что при выполнении датчика влажности в виде емкостного датчика измерение влажности может быть неточным. Эта неточность обусловлена тем, что такой датчик измеряет и определяет по существу все количество проходящей мимо него воды. Однако это общее количество воды зависит не только от относительной влажности убранной массы, но также от абсолютного количества убранной массы, принятой на момент измерения. В результате при более высоком расходе убранной массы измеренная влажность часто имеет направленную вверх погрешность и, соответственно, при низком расходе имеет направленную вниз погрешность.
Раскрытие изобретения
Исходя из уровня техники, задачей настоящего изобретения является дальнейшее усовершенствование сельскохозяйственной рабочей машины для более точного определения влажности убранной массы.
Решение указанной проблемы достигается в сельскохозяйственной рабочей машине в соответствии с ограничительной частью пункта 1 за счет признаков отличительной части пункта 1 формулы изобретения.
Существенным для изобретения является знание того, что в такой сельскохозяйственной рабочей машине часто с помощью датчиков воспринимается действительный расход принимаемой убранной массы. Как правило, бывает специально предусмотрен датчик высоты слоя, который определяет действительный расход принимаемой убранной массы в области ее приема и, в частности, в наклонном питателе. В соответствии с изобретением было осознано, что это определение действительного расхода может использоваться для того, чтобы соответствующим образом корректировать измерение влажности принимаемой убранной массы. За счет этого может быть откорректировано вызывающее погрешность влияние расхода на измеренную влажность и получена более точная величина влажности для целей настройки машинных параметров.
Взаимосвязь между определяемым расходом и корректировкой измеренной влажности может быть задана с помощью функции, которая описывается предпочтительным примером осуществления в зависимом пункте 3.
Предлагаемое решение позволяет также учитывать то явление, что при расходе убранной массы меньше определенной величины восприятие влажности является очень неточным. Поэтому в пункте 5 формулы изобретения предлагается в таком случае сохранять последнюю определенную и откорректированную величину влажности до тех пор, пока при увеличении принимаемой убранной массы вновь не станет возможным точное измерение.
Обратным образом при превышении определенного расхода больше не существует взаимосвязи или не имеется существенной взаимосвязи между расходом и измеренной влажностью, так что в этом случае уже нет необходимости в корректировке. Это является предметом изобретения в зависимом пункте 6.
Предпочтительные места расположения системы в сельскохозяйственной рабочей машине и предпочтительные примеры выполнения типов датчиков описаны в пунктах 8 и 9.
В зависимых пунктах 10-13 описано, каким образом измеряемая влажность убранной массы может благоприятно влиять на управление рабочими аппаратами рабочей машины.
В пункте 14 специально учитывается то обстоятельство, что измеряемая влажность убранной массы может также использоваться для оптимизации функции защиты от перегрузки молотильного устройства зерноуборочного комбайна.
И наконец, пункт 15 относится к дальнейшей обработке измеряемой влажности убранной массы, которая впоследствии может использоваться в самой сельскохозяйственной рабочей машине путем того, что измеряемая влажность убранной массы привязывается к текущему положению машины, в котором измеряется эта влажность, так что распределение влажности убранной массы может быть географически отображено на посевной площади. Эти данные важны в экономическом аспекте и позволяют улучшать сельскохозяйственное использование посевных площадей.
Краткое описание чертежей
Другие подробности, особенности цели и преимущества изобретения будут описаны на предпочтительном примере выполнения со ссылками на прилагаемые чертежи. На чертежах:
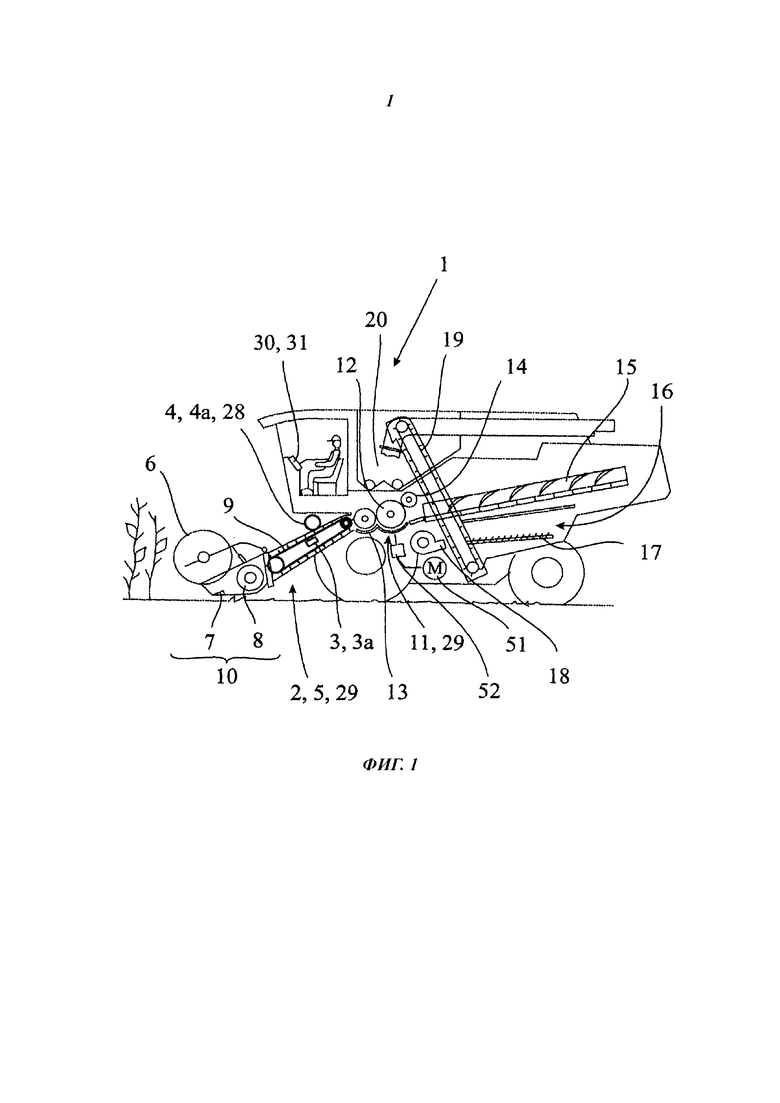
фиг. 1 схематично изображает на виде сбоку зерноуборочный комбайн в качестве предлагаемой сельскохозяйственной рабочей машины,
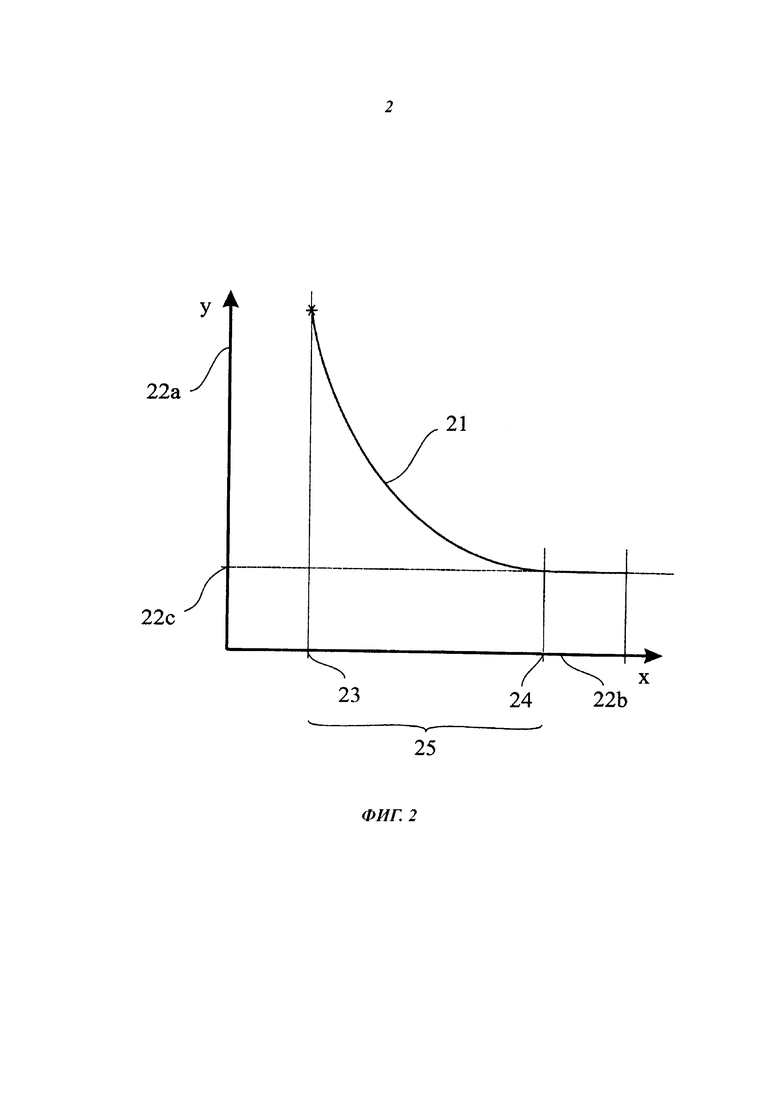
фиг. 2 изображает в качестве примера кривую корректировки, на основе которой измеренная влажность убранной массы может корректироваться в зависимости от ее расхода,
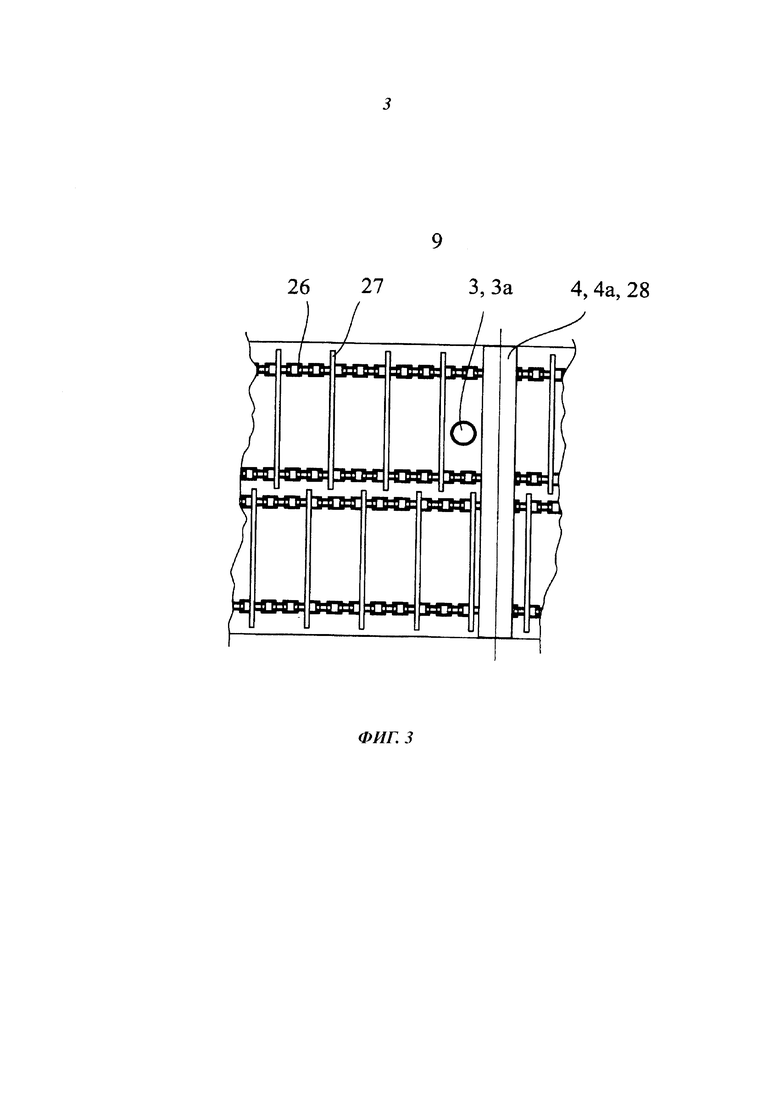
фиг. 3 изображает на виде сверху наклонный питатель предлагаемого зерноуборочного комбайна по фиг. 1,
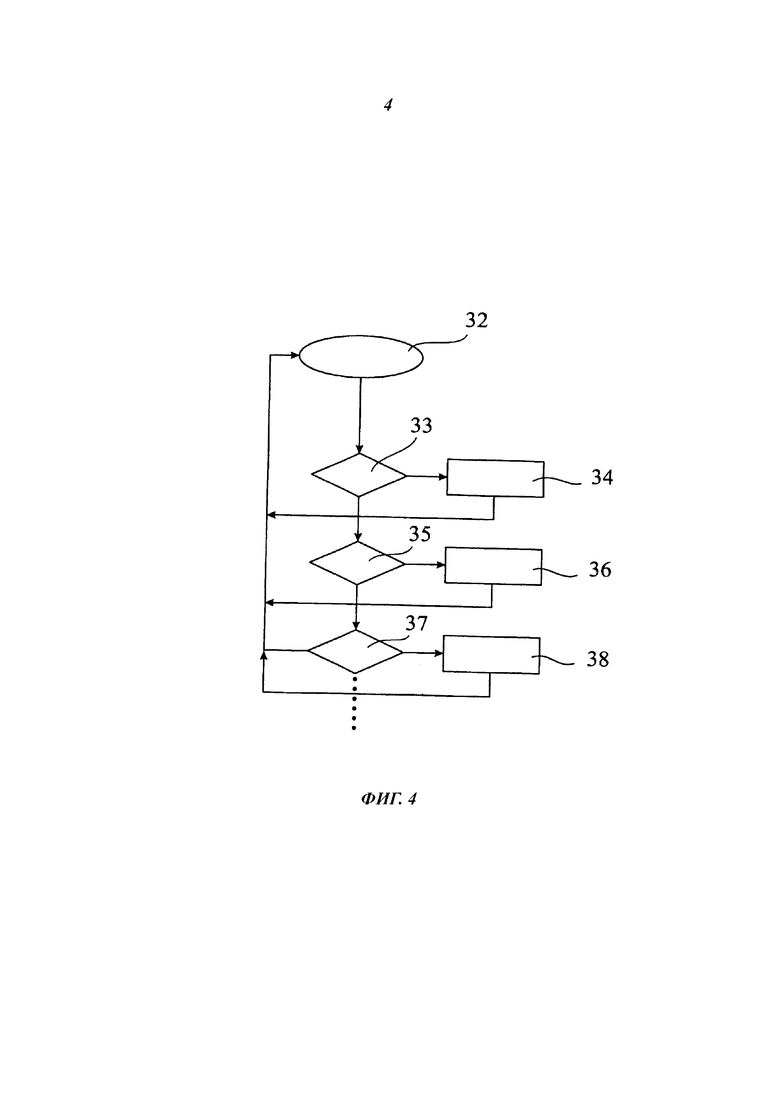
фиг. 4 изображает функциональную схему, которая в качестве примера представляет управление рабочими аппаратами зерноуборочного комбайна по фиг. 1 в зависимости от измеренной влажности убранной массы, и
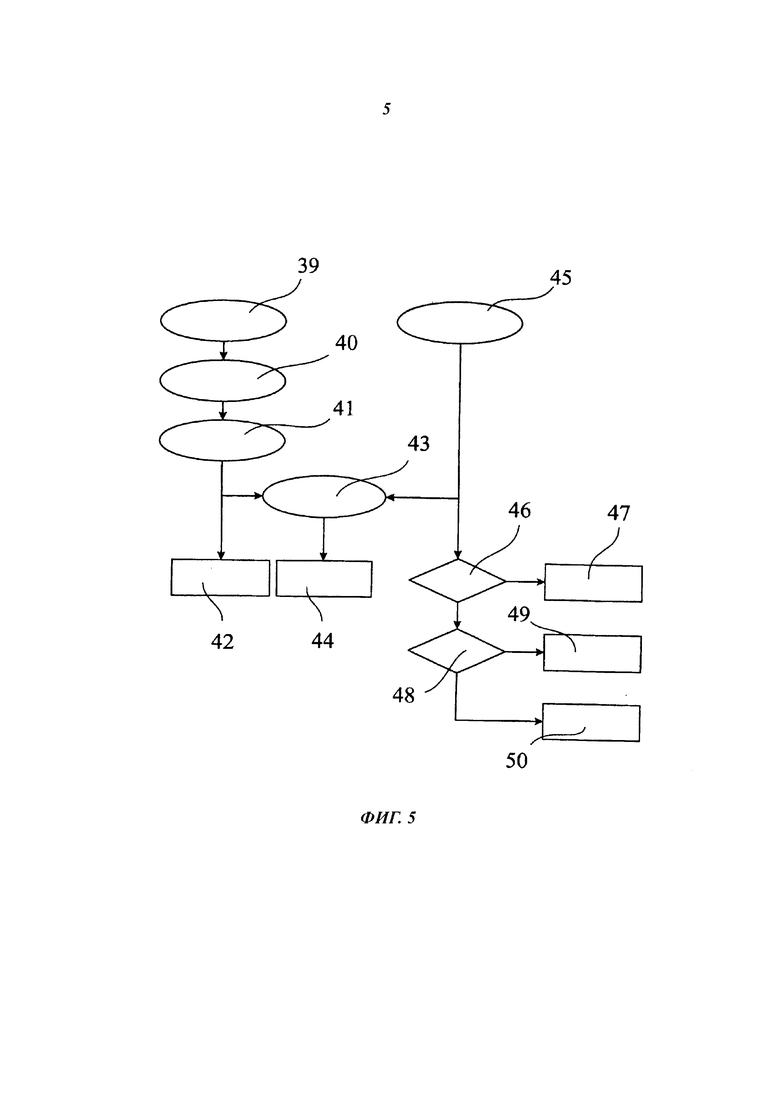
фиг. 5 изображает функциональную схему, которая представляет предлагаемую дополнительную корректировку сигнала влажности убранной массы в зависимости от ее установленного расхода.
Осуществление изобретения
Показанная на фиг. 1 предлагаемая сельскохозяйственная рабочая машина, которая в качестве примера представляет собой зерноуборочный комбайн 1, предназначена для обработки убранной массы и содержит приемный аппарат 2 для приема массы, систему 3 датчиков для измерения влажности принятой убранной массы и для генерирования сигнала, основанного на измеренной влажности, а также систему 4 датчиков, которая предпочтительно представляет собой систему 4а датчиков высоты слоя для определения расхода принятой убранной массы.
Предлагаемая сельскохозяйственная рабочая машина отличается тем, что сигнал влажности массы дополнительно корректируется на основе установленного расхода массы. В данном контексте дополнительная корректировка может содержать любую модификацию сигнала влажности массы, которая зависит от установленного расхода. Эта модификация может производиться путем процентной корректировки, путем умножения, добавления или вычитания величины смещения или путем присвоения сигналу влажности массы определенной величины коэффициента. Эта дополнительная корректировка может быть предусмотрена также только для определенного диапазона величин измеренной влажности или определенного диапазона расхода и не распространяться на области за пределами диапазона. Также нет необходимости в том, чтобы при всех условиях каждый раз изменять сигнал влажности убранной массы посредством дополнительной корректировки, как это будет пояснено дальше на примерах осуществления. Дополнительная корректировка сигнала влажности массы может охватывать как замену первоначального сигнала влажности массы, так и генерирование нового сигнала влажности массы на основе этого первоначального сигнала с учетом дополнительной корректировки.
Приемный аппарат может быть выполнен в виде сменного аппарата 5, который, как это показано на фиг. 1, содержит мотовило 6, режущий брус 7 и приемный шнек 8. Кроме того сменный аппарат содержит наклонный питатель 9. Мотовило 6, режущий брус 7 и приемный шнек 8 могут быть здесь обозначены совместно как жатвенный аппарат 10, а принятая убранная масса в качестве потока убранной массы транспортируется наклонным питателем 9 в комбайн для последующей обработки. Таким образом, убранная масса принимается приемным аппаратом 2.
От наклонного питателя 9 принятая убранная масса подается к молотильному устройству 11, содержащему молотильный барабан 12 и подбарабанье 13. По ходу транспортирования за молотильным устройством 11 расположен отбойный барабан 14, который подает поток убранной массы в сепарирующее устройство 15 для отделения свободных подвижных зерен. За ним следует очистное устройство 16 с одним или несколькими решетными плоскостями 17 и вентилятором 18. Далее, как это показано на фиг.1, следуют зерновой элеватор 19 и зерновой бункер 20.
Предпочтительно сигнал влажности массы генерируется постоянно. Это означает, что сигнал влажности массы генерируется либо непрерывно, либо с небольшими интервалами времени между точками восприятия. Альтернативно или дополнительно производится также постоянное определение расхода. Таким образом, сигнал влажности массы генерируется в режиме онлайн, то есть почти в режиме реального времени, и расход определяется также почти в режиме реального времени. Из этих двух обстоятельств предпочтительно следует, что сигнал влажности массы по существу дополнительно корректируется на основе определяемого расхода. При этом дополнительно откорректированный сигнал влажности массы в каждый момент является реальным.
Далее, предпочтительно сигнал влажности массы дополнительно корректируется на основе определяемого расхода с помощью функции корректировки по расходу. Такая функция корректировки по расходу может быть задана кривой корректировки, представленной на фиг. 2. В этом специальном случае коэффициент 21 корректировки, на который умножается сигнал влажности массы, считывается по y-оси 22а и определяется в зависимости от расхода, отложенного на x-оси 22b. В этом случае при низком расходе коэффициент корректировки составляет больше единицы и при увеличении расхода уменьшается. Равным образом альтернативно при другом пропорциональном уменьшении сигнала влажности массы возможно назначение коэффициента корректировки равным единице и при большем расходе назначение его меньше единицы. На фиг. 2 равный единице коэффициент корректировки обозначен в качестве стандартной величины 22с.
Возможно также построение плоской кривой в качестве функции корректировки по расходу, причем в этом случае коэффициент корректировки зависит как от определяемого расхода, так и от еще не откорректированного сигнала. В результате будет получен коэффициент корректировки, который зависит не только от измеренного расхода, как в примере по фиг. 2, но также и от измеренной влажности.
Вид культуры убранной массы также влияет на измеряемую влажность. Для учета этого предпочтительно предусмотрено, что дополнительная корректировка сигнала влажности массы производится также на основе определения вида культуры. Это определение вида культуры может основываться на восприятии вида культуры датчиками или на соответствующем вводе оператора.
Во избежание ошибочного результата при слишком низком расходе предпочтительно предусмотрено, что при снижении определяемого расхода ниже наименьшего расхода 23, сигнал влажности массы дополнительно корректируется на величину сигнала влажности массы перед пересечением величины наименьшего расхода. Эту взаимосвязь также можно видеть на фиг. 2, когда при величине расхода ниже наименьшего расхода 23 не производится изменения сигнала влажности массы посредством функции корректировки по расходу. Вместо этого сохраняется последняя установленная величина сигнала влажности массы, - с учетом дополнительной корректировки. При этом предпочтительно в этом случае сигнал влажности массы устанавливается на величине сигнала влажности массы перед снижением расхода ниже наименьшей величины расхода.
И наоборот, предпочтительно при превышении определяемым расходом наибольшего расхода 24 сигнал влажности массы посредством дополнительной корректировки остается по существу неизменным. На фиг. 2 эта взаимосвязь представлена тем, что за пределами наибольшего расхода 24 функция корректировки по расходу имеет в этой области постоянную величину, равную единице, в соответствии с величиной 22 с единицы. От наименьшего расхода 23 до наибольшего расхода 24 между этими двумя величинами образована область 25 корректировки, показанная на фиг. 2. Здесь предпочтительно предусмотрено, что при определенном расходе в пределах области 25 корректировки сигнал влажности массы дополнительно корректируется таким образом, что измеренная системой 3 датчиков влажности влажность принятой убранной массы, которая может быть, в частности, абсолютной величиной влажности убранной массы, привязывается к определенному расходу. При этом получают дополнительно откорректированный сигнал влажности массы, который указывает процентную влажность. Предпочтительно, как это показано на диаграмме, область 25 корректировки лежит между наибольшим расходом 24 и наименьшим расходом 23.
Предпочтительно также система 3 датчиков влажности, а также альтернативно или дополнительно система 4а датчиков высоты слоя расположены на приемном аппарате 2, в частности, в приемном канале приемного аппарата 2. В качестве примера это показано на фиг. 3, которая изображает на виде сверху наклонный питатель 9 предлагаемого зерноуборочного комбайна по фиг. 1. На чертеже видны роликовые цепи 26 с приемными скребками 27. Валик 28 толщины слоя позволяет определять расход с помощью упомянутой системы 4а датчиков высоты слоя, часть которой он составляет. Таким образом, приемный канал образован по существу в этой области показанной верхней стороной наклонного питателя 9. На наклонном питателе 9 расположена также система 3 датчиков влажности.
В этой связи предпочтительно система 3 датчиков влажности предназначена для бесконтактного измерения влажности принятой убранной массы. В частности, система 3 датчиков влажности может содержать емкостный датчик. Другими возможными видами бесконтактных датчиков для системы 3 датчиков влажности являются инфракрасные датчики ближней области, причем здесь могут использоваться, в частности, конструкции с простыми фотодиодами, а также два или три передающих диода с постоянной длиной волны. Возможно также использование датчиков на основе микроволнового метода или метода динамической рефлектометрии.
Далее, предпочтительно сельскохозяйственная рабочая машина содержит рабочие аппараты 29, к которым, в частности, относятся одна или несколько групп, содержащих молотильное устройство 11, сменный аппарат 5, сепарирующее устройство 15 и очистное устройство 16.
Предпочтительно сельскохозяйственная рабочая машина содержит также систему 30 управления для управления рабочими аппаратами 29, причем здесь предусмотрено, что система 30 управления управляет рабочими аппаратами 29 на основе сигнала влажности массы. Это может служить для оптимизации качества обмолота или эксплуатации дизеля. Управление рабочими аппаратами 29 предпочтительно может выполняться таким образом, что система 30 управления регулирует рабочие аппараты 29 на основе сигнала влажности убранной массы.
Согласно примеру осуществления по фиг. 1 система 30 управления может представлять собой центральный электронный блок 31, снабженный операторским интерфейсом для пользователя. Имеются также преимущества, когда система 30 управления содержит автоматы настройки механизмов, которые предназначены для управления рабочим аппаратом, при этом система 30 управления определяет эксплуатационные параметры автоматов настройки механизмов на основе дополнительно откорректированного сигнала влажности массы. Эти автоматы настройки механизмов могут быть выполнены в виде программного обеспечения, так что, например, все они работают в рамках соответствующего программного обеспечения в системе 30 управления, то есть здесь в центральном электронном блоке 31. Однако некоторое из них или все автоматы настройки механизмов могут быть образованы отдельными автономными устройствами.
Предпочтительно предусмотрено, что система 30 управления осуществляет управляющее действие для управления рабочим аппаратом 29 на основе изменения сигнала влажности массы. Другими словами, например, для управления рабочим аппаратом 29 активируются определенные программы, когда наступают определенные условия сигнала влажности массы. Так, предпочтительно предусмотрено, что при повышении сигнала влажности массы и особенно при превышении его верхней предельной величины система 30 управления интенсифицирует управляющее действие для управления рабочим аппаратом 29. Альтернативно или дополнительно может быть предусмотрено, что при снижении сигнала влажности массы, особенно при переходе через нижнюю предельную величину система 30 управления снижает интенсивность управляющего действия для управления рабочим аппаратом 29.
Помимо этого соответствующего управляющего действия, которое осуществляется при превышении верхней предельной величины или снижении за нижнюю предельную величину, может инициироваться также установление достаточно большого изменения в пределах временного интервала, то есть установление достаточно высокой скорости изменения независимо от направления изменения такого процесса. Поэтому предпочтительно, что когда скорость изменения сигнала влажности массы превышает предельную величину скорости изменения, система 30 управления варьирует интенсивность управляющего действия в пределах изменения скорости для управления рабочими аппаратами 29. При этом инициация такого варьируемого управляющего действия может зависеть от того, что скорость изменения сигнала влажности массы идет в определенном направлении.
При этом повышение, понижение или варьирование интенсивности управляющего действия могут относиться к нескольким рабочим аппаратам 29. Для различных рабочих аппаратов 29 могут быть установлены различные верхние или нижние предельные величины и предельные величины изменения, причем в этом случае конкретное повышение, понижение или варьирование интенсивности работы соответствующего рабочего аппарата 29 может осуществляться различным образом.
Пример указанных вариантов отражен на фиг. 4, где, исходя из начального состояния 32, вначале выполняется первый шаг 33 проверки относительно верхней предельной величины, при этом в том случае, когда она превышена, следует первый шаг 34 запуска повышения интенсивности действия. В том случае, когда верхняя предельная величина не превышена, на втором шаге 35 проверки проверяется пересечение нижней предельной величины, причем в случае ее пересечения на втором шаге 36 запуска может следовать запуск понижения интенсивности действия. При отсутствии этого на последнем шаге 37 следует определение того, не была ли превышена предельная величина изменения скоростью изменения сигнала влажности массы. Если этот случай имеет место, на третьем шаге 38 запускается варьирование интенсивности действия. Возможны также другие, в частности, последующие шаги проверки и соответствующие шаги запуска.
Подобным образом фиг. 5 изображает функциональную схему дополнительной корректировки сигнала влажности массы в зерноуборочном комбайне по фиг. 1. Вначале на шаге 39 определения влажности массы системой 3 датчиков влажности массы измеряется влажность принятой убранной массы и на ее основе генерируется сигнал влажности массы. Следующий шаг 40 корректировки по температуре предусматривает настройку сигнала влажности массы на основе температуры окружающей среды. На следующем шаге 41 корректировки по виду культуры сигнал влажности массы дополнительно корректируется на основе определения вида культуры. Альтернативно при дополнительной корректировке с помощью кривой корректировки может выполняться выбор кривой корректировки на основе установленного вида культуры.
Настроенный таким образом, но еще не подвергнутый дополнительной корректировке в соответствии с изобретением сигнал влажности массы, с одной стороны, сохраняется в качестве исходного сигнала 42. С другой стороны, на шаге 43 дополнительной корректировки сигнал влажности массы подвергается дополнительной корректировке на основе установленного расхода, как это, например, было пояснено на примере со ссылкой на фиг. 2, в результате чего получают соотнесенный с высотой слоя нормированный сигнал 44. Как уже было описано, эта дополнительная корректировка сигнала влажности массы зависит от установленного расхода, так что для определения расхода одновременно с шагом 39 определения влажности массы на шаге 45 получают измеренную высоту слоя от системы 4а датчиков высоты слоя и из нее определяют расход.
На шаге 46 проверки нижней предельной величины, который следует за шагом 43 дополнительной корректировки, определяется, не лежит ли расход ниже наименьшего расхода 23, причем в случае подтверждения на шаге 47 сохранения в качестве текущего действительного сигнала считается последний действительный сигнал, полученный перед пересечением наименьшего расхода 23, - а именно нормированный сигнал 44, полученный после дополнительной корректировки.
Если снижение ниже наименьшего расхода не имеет места, на шаге 48 проверки верхней предельной величины проверяется, не имело ли места превышение наибольшего расхода определяемым расходом. В случае подтверждения на шаге 49 в качестве действительного сигнала влажности массы принимается исходный сигнал 42, поскольку здесь, - как уже было указано, - не требуется дополнительной корректировки или она привела бы к величине, идентичной исходному сигналу 42. Если в отличие от этого наибольший расход не превышен, установленный расход находится в области корректировки, и на шаге 50 обработки корректировки в качестве действительного сигнала влажности массы дальше используется дополнительно откорректированный нормированный сигнал 44, например, для описанного выше определения эксплуатационных параметров автоматов настройки механизмов.
Далее будет описано другое предпочтительное применение дополнительно откорректированного сигнала влажности массы в связи с защитой от перегрузки. Здесь предпочтительно система 30 управления при управлении рабочими аппаратами 29 предоставляет защиту от перегрузки, в частности, молотильного устройства 11, причем при установлении перегрузки система 30 управления управляет рабочими аппаратами 29 в соответствии с программой защиты от перегрузки. Предпочтительно также предусмотрено, что порог чувствительности для установления перегрузки основывается на сигнале влажности массы. Это может осуществляться, в частности, путем того, что сельскохозяйственная рабочая машина снабжена приводом 51 и соединительной муфтой 52 для привода молотильного устройства 11, а порог проскальзывания соединительной муфты 52 для установления перегрузки основывается на сигнале влажности массы. Таким образом, перегрузка устанавливается, когда проскальзывание соединительной муфты 52, которая может быть, в частности, ременной муфтой, превышает порог проскальзывания. Здесь может быть, например, предусмотрено, что порог проскальзывания может быть избирательно установлен на 8%, 13% и 18%, причем действительный порог проскальзывания выбирается в зависимости от сигнала влажности массы.
Другое применение относится к возможности картографирования влажности зерновых. Для этого предпочтительно предусмотрено, что система 30 управления выполнена с возможностью протоколирования сигнала влажности массы для картографирования, причем предпочтительно система 30 управления способна также увязывать сигнал влажности массы с данными положения сельскохозяйственной рабочей машины в процессе приема убираемой массы и передавать на удаленное вычислительное устройство запротоколированный сигнал влажности массы вместе с привязанными к нему данными положения сельскохозяйственной рабочей машины. Эта передача может производиться, в частности, через радиоинтерфейс, например, для мобильной системы радиосвязи. При этом получают важные данные для последующей сельскохозяйственной обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2477038C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| УБОРОЧНЫЙ КОМПЛЕКС | 2012 |
|
RU2569566C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| CИСТЕМА ПОМОЩИ ДЛЯ ВОДИТЕЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2011 |
|
RU2565225C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ УБОРОЧНОЙ МАШИНЫ | 2003 |
|
RU2359446C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ПОТОКА УБРАННОЙ МАССЫ СЕЛЬСКОХОЗЯЙСТВЕННОГО МАТЕРИАЛА | 2004 |
|
RU2339209C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2621252C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2708025C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН С СИСТЕМОЙ ПОМОЩИ ВОДИТЕЛЮ | 2015 |
|
RU2685153C2 |
Изобретение относится к сельскохозяйственному машиностроению. Сельскохозяйственная рабочая машина содержит приемный аппарат для приема убранной массы, систему датчиков влажности и систему датчиков расхода. Система датчиков влажности измеряет влажность принятой убранной массы и генерирует сигнал влажности массы на основе измеренной влажности. Система датчиков расхода определяет расход убранной массы. Сигнал влажности массы дополнительно корректируется на основе определяемого расхода массы. Благодаря более точному определению влажности убранной массы повышается эффективность работы сельскохозяйственной рабочей машины. 12 з.п. ф-лы, 5 ил.
1. Сельскохозяйственная рабочая машина, в частности зерноуборочный комбайн (1) для обработки убранной массы, содержащая приемный аппарат (2) для приема убранной массы, систему (3) датчиков влажности для измерения влажности принятой убранной массы и генерирования сигнала влажности массы на основе измеренной влажности, и систему (4) датчиков расхода, предпочтительно систему (4а) датчиков толщины слоя, для определения расхода принятой убранной массы, причем обеспечена дополнительная корректировка сигнала влажности массы на основе определяемого расхода, отличающаяся тем, что
система (3) датчиков влажности выполнена с возможностью бесконтактного измерения влажности принятой убранной массы и представляет собой емкостный датчик (3а), и тем, что
при нахождении определяемого расхода в пределах области (25) корректировки обеспечена корректировка сигнала влажности массы таким образом, что измеренная системой (3) датчиков влажности абсолютная влажность принятой убранной массы, в целом, привязана к определяемому расходу и область (25) корректировки лежит между наибольшим расходом (24) и наименьшим расходом (23).
2. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что обеспечена, по существу, непрерывная генерация сигнала влажности массы и/или, по существу, непрерывное определение расхода, при этом предпочтительно обеспечена, по существу, непрерывная дополнительная корректировка сигнала влажности массы на основе определяемого расхода.
3. Сельскохозяйственная рабочая машина по п. 1 или 2, отличающаяся тем, что обеспечена дополнительная корректировка сигнала влажности массы на основе определяемого расхода посредством функции корректировки по расходу.
4. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что дополнительно обеспечена корректировка сигнала влажности массы на основе определения вида культуры.
5. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что при снижении определяемого расхода ниже наименьшего расхода (23) обеспечена дополнительная корректировка сигнала влажности массы на величину сигнала влажности массы перед пересечением величины наименьшего расхода (23), предпочтительно установка на величине сигнала влажности массы перед пересечением наименьшего расхода (23).
6. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что при превышении наибольшего расхода (24) определяемым расходом сигнал влажности массы посредством дополнительной корректировки оставляется, по существу. неизменным.
7. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что система (3) датчиков влажности и/или система (4а) датчиков высоты слоя расположена в приемном аппарате (2), предпочтительно в приемном канале приемного аппарата (2).
8. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что она содержит рабочие аппараты (29), в частности, охватывающие молотильное устройство (11) и/или сменный аппарат (5), и систему (30) управления для управления рабочими аппаратами (29), причем система (30) управления выполнена с возможностью управления рабочими аппаратами (29) на основе сигнала влажности массы, предпочтительно при этом система (30) управления выполнена с возможностью регулирования рабочих аппаратов (29) на основе сигнала влажности массы.
9. Сельскохозяйственная рабочая машина по п. 8, отличающаяся тем, что система (30) управления содержит автоматы настройки механизмов, каждый из которых связан с рабочим аппаратом (29) для управления рабочим аппаратом (29), при этом система (30) управления выполнена с возможностью определения эксплуатационных параметров автоматов настройки механизмов на основе дополнительно откорректированного сигнала влажности массы.
10. Сельскохозяйственная рабочая машина по п. 8 или 9, отличающаяся тем, что система (30) управления выполнена с возможностью осуществления управляющего действия для управления рабочими аппаратами (29) на основе изменения сигнала влажности массы.
11. Сельскохозяйственная рабочая машина по п. 10, отличающаяся тем, что система (30) управления выполнена с возможностью интенсификации управляющего действия при повышении сигнала влажности массы, в частности, при превышении верхней предельной величины для управления рабочими аппаратами (29), и/или система (30) управления выполнена с возможностью снижения интенсивности управляющего действия при снижении сигнала влажности массы, в частности, при пересечении нижней предельной величины для управления рабочими аппаратами (29), и/или система (30) управления выполнена с возможностью варьирования интенсивности управляющего действия при превышении предельной величины изменения скоростью изменения сигнала влажности массы для управления рабочими аппаратами (29).
12. Сельскохозяйственная рабочая машина по одному из пп. 8, 9, 11, отличающаяся тем, что система (30) управления при управлении рабочими аппаратами (29), в частности молотильным устройством (11), обеспечивает защиту от перегрузки, причем система управления выполнена с возможностью управления рабочими аппаратами, при установлении перегрузки, в соответствии с программой защиты от перегрузки, при этом порог чувствительности для установления перегрузки основан на сигнале влажности массы, при этом предпочтительно сельскохозяйственная рабочая машина содержит привод (51) и соединительную муфту (52) для привода молотильного устройства (11), а порог проскальзывания соединительной муфты (52) для установления перегрузки основан на сигнале влажности массы.
13. Сельскохозяйственная рабочая машина по одному из пп. 8, 9, 11, отличающаяся тем, что система (30) управления выполнена с возможностью протоколирования сигнала влажности массы для картографирования, предпочтительно также с его привязкой к данным положения сельскохозяйственной рабочей машины во время приема убранной массы, и далее передачи запротоколированного сигнала влажности массы с привязанными к нему данными положения сельскохозяйственной рабочей машины на удаленное вычислительное устройство, в частности, через радиоинтерфейс.
| ЗАБОЙНЫЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2057883C1 |
| Контактное устройство | 1984 |
|
SU1266558A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ РАБОЧИХ МАШИН И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2374821C2 |
| СПОСОБ ОПТИМИЗАЦИИ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ МАШИНЫ | 2004 |
|
RU2350999C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ УБОРОЧНОЙ МАШИНЫ | 2003 |
|
RU2359446C2 |

