Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственной рабочей машине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Из уровня техники достаточно известны самоходные уборочные машины, выполненные в виде зерноуборочных комбайнов, с уборочными устройствами, приспособленными к уборке соответствующей культуры. Несмотря на множество автоматических регулировок уборочных устройств, в частности, высоты среза, положения мотовила и ножевого бруса, оператору зерноуборочного комбайна приходится постоянно визуально контролировать поток культуры внутри уборочного устройства. Например, он должен следить за равномерной скоростью потока убранной культуры в уборочном устройстве, поскольку в случае неравномерного потока культуры может потребоваться снизить скорость машины и, тем самым, захвата культуры в целях предотвращения затора убранной культуры. При образовании затора, то есть при блокировании потока культуры, потребуется прервать процесс уборки и выполнить затратное удаление затора. Необходимое для этого время существенно влияет на рентабельность уборки убранной культуры. Проблема, связанная с предотвращением зазора культуры, заключается в том, что визуально можно распознать лишь полностью сформировавшийся затор, что зачастую оказывается слишком поздно для внесения коррективов в работу уборочного устройства. Поэтому имеет смысл реализовать точное отслеживание потока культуры для распознавания образующегося затора на ранней стадии.
Выкладное описание патента DE 10 2008 032 191 А1, которое считается наиболее близким к настоящей заявке, раскрывает самоходную уборочную машину с блоком датчиков, предназначенным для контроля потока культуры внутри уборочного устройства уборочной машины. В частности, предусмотрена камера, захватывающая изображения потока культуры. Эти изображения обрабатываются методом динамической расфокусировки или сравнения изображений. Метод динамической расфокусировки путем настройки экспозиции камеры распознает неравномерности потока культуры на основании резкости изображения. Недостаток такого подхода заключается в сложности машинного анализа данных этих изображений для автоматического управления и регулирования уборочной машины.
Кроме того, точное распознавание неравномерностей потока культуры в значительной мере зависит от предварительно выставленного времени экспозиции. Предложенный способ сравнения изображений регистрирует смещения признаков убираемой культуры от изображения к изображению и делает выводы о неполадках в потоке культуры. Для этого, однако, требуется затратное распознавание признаков убираемой культуры на изображении и, при необходимости, предварительная настройка метода. Кроме того, заявка не указывает распознаваемые признаки убираемой культуры.
Раскрытие сущности изобретения
Таким образом, задачей настоящего изобретения является дальнейшее развитие и усовершенствование контроля потока культуры, известного из уровня техники, в отношении точности, надежности и своевременности.
Поставленная задача решена сельскохозяйственной рабочей машиной с признаками, раскрытыми в независимом пункте 1 формулы изобретения. Предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы.
Сельскохозяйственная рабочая машина, в частности, самоходная уборочная машина с уборочным устройством, содержащим устройство для срезания убираемой культуры, устройство для захвата убранной культуры и/или устройство для втягивания убранной культуры и, по меньшей мере, одно устройство для транспортировки убранной культуры, и с системой обработки изображений, блоком вывода данных, и, по меньшей мере, одной системой датчиков, связанной с уборочным устройством и выполненной с возможностью определения потока убранной культуры в уборочном устройстве, причем система датчиков соединена с системой обработки изображений для передачи изображений, причем изображения, созданные системой датчиков, передают в систему обработки изображений, причем система обработки изображений обрабатывает набор доступных изображений, причем система обработки изображений на первом этапе предварительно обрабатывает переданные изображения, на следующем этапе формирует из предварительно обработанных изображений оптический поток и соответствующие векторные поля, а на следующем этапе выводит из соответствующих векторных полей профили скорости потока убранной культуры и анализирует их, гарантирует своевременное обнаружение изменений, происходящих в потоке культуры. В частности, можно на ранней стадии распознавать заторы культуры, образующиеся в уборочном устройстве. Решающее значение имеет знание того факта, что затору культуры обычно предшествует уменьшение скорости потока убранной культуры в уборочном устройстве. Определение оптического потока позволяет, по существу, детально, непрерывно и по всей площади определять с высоким разрешением локальные скорости потока убранной культуры в уборочном устройстве. Нет необходимости в идентификации структур, объектов или признаков убранной культуры, требующей больших вычислительных мощностей. Предварительная обработка изображений дополнительно повышает надежность и скорость обработки изображений. Кроме того, определение профилей скорости потока культуры упрощает управление уборочным устройством и/или контроль потока культуры для оператора.
В предпочтительном варианте осуществления изобретения, по меньшей мере, одна система датчиков содержит камеру, причем камера выполнена, в частности, в виде монохромной и/или цветной камеры. Это позволяет легко и с высоким разрешением создавать изображения, в частности, входящие в последовательность изображений.
Чтобы обеспечить систему обработки изображений, в том числе, опорными значениями скорости для сравнения, в предпочтительном варианте осуществления изобретения изображения уборочного устройства захватывают, в том числе, примыкающее окружающее пространство, содержащее, в частности, область поля в направлении движения перед уборочным устройством и/или область поля в направлении движения за уборочным устройством.
Система обработки изображений может быть реализована технически простым и экономически выгодным образом, если она будет представлять собой электронный вычислительный модуль, в частности, присоединенный к сельскохозяйственной рабочей машине и предназначенный для электронной обработки и анализа изображений и/или данных, полученных из изображений.
В предпочтительном варианте осуществления изобретения можно легко определять оптический поток и соответствующие векторные поля благодаря возможности группировки каждых двух, в частности, двух следующих друг за другом изображений последовательности в пару изображений, регистрации и/или предварительному заданию периода между изображениями соответствующей пары и присвоения каждому изображению шаблона интенсивности.
Чтобы система обработки изображений могла быстро и надежно обрабатывать изображения, первый этап предварительной обработки изображений включает нормализацию интенсивности, подавление шумов и теней, стабилизацию изображения и/или поворот изображения. Нормализация интенсивности, предпочтительно, увеличивает динамический диапазон и улучшает контрастность изображений. Подавление шумов удаляет с изображений пыль, образующуюся при уборке культуры, и, тем самым, уменьшает искажения отраженного потока культуры. Подавление теней, предпочтительно, исключает большие области, по существу, однородной интенсивности, например, тени, из последующей обработки, причем текстуры изображения, по существу, сохраняются. Стабилизация изображения позволяет сгладить колебания и вибрации кабины транспортного средства и/или сельскохозяйственной рабочей машины, в результате чего достигается стабилизация фрагмента изображения. Возможный поворот изображения переориентирует изображение в соответствии с направлением движения и/или приметными кромками, что облегчает обработку области изображения.
В следующем предпочтительном варианте осуществления изобретения на следующем этапе для определения оптического потока распознают сдвиги положения шаблонов интенсивности между изображениями, по меньшей мере, одной пары изображений, причем сдвиги положения содержат величины и направления перемещения, а величины и направления перемещения шаблонов интенсивности каждой пары изображений объединяют в виде векторов в соответствующем векторном поле, в частности в матрице соответствующей пары изображений. Это упрощает и ускоряет функционирование системы обработки изображений. Использование шаблонов интенсивности позволяет обойтись без затратного распознавания или признаков / объектов изображения. Позиции отдельных величин интенсивности в шаблонах интенсивности дают опорные точки для расчета скоростей. Распознавание величин и/или направлений перемещения и их сведение в векторные поля позволяет легко рассчитать скорость потока убранной культуры, предпочтительно на большой площади и с высоким разрешением, в уборочном устройстве в целом.
Для обеспечения возможности простого и точного вычисления оптического потока и соответствующих векторных полей в предпочтительном варианте осуществления изобретения на следующем этапе оптический поток и соответствующие векторные поля определяют дифференциальным методом, согласно которому, в частности, путем выведения шаблона интенсивности соответствующего изображения получают градиентную функцию, градиентные функции обоих изображений соответствующей пары изображений вычитают, и получают результирующую функцию, отражающую смещения шаблонов интенсивности для соответствующего векторного поля пары изображений.
Благодаря тому, что на следующем этапе в качестве дифференциального метода используют метод Лукаса-Канаде, предполагающий постоянство оптического потока в локальном окружении пикселя изображения, для которого определен оптический поток, в выгодном варианте изобретения обеспечивают устойчивость к шумам и небольшим дефектам изображений. Кроме того, этот метод позволяет учитывать повороты, масштабирование и искажения частей изображения.
Благодаря тому, что на следующем этапе в качестве метода Лукаса-Канаде используют пирамидальный метод Лукаса-Канаде, в котором первое разрешение изображений каждой пары для расчета оптического потока и соответствующих векторных полей сокращают, по меньшей мере, до одного следующего разрешения изображения, после чего рассчитывают оптический поток и соответствующие векторные поля и многократно корректируют, пошагово восстанавливая первое разрешение изображения, в предпочтительном варианте осуществления уменьшается необходимая скорость изображения / частота кадров последовательности изображений, в частности видео.
Для обеспечения возможности простого определения и, предпочтительно, отображения скоростей на каждой паре изображений, в предпочтительном варианте осуществления на следующем этапе рассчитывают скорости в изображениях, в частности, скорости потока культуры в уборочном устройстве, на основании величин смещения соответствующего векторного поля соответствующей пары изображений и периода между изображениями соответствующей пары и отображают в виде профилей скорости потока культуры, в частности, убранной культуры.
В предпочтительном варианте осуществления на следующем этапе области изображения, отображающие поток культуры, распределяют по участкам, после чего рассчитывают усредненную скорость потока культуры для каждого участка путем вычисления среднего значения скоростей потока культуры на соответствующем участке, в частности, путем формирования медианы, после чего выводят и анализируют дискретные профили скоростей потока культуры на основании усредненных скоростей потока культуры на каждом участке. В результате информация наглядным образом суммируется и уменьшается в объеме. Кроме того, система обработки изображений может быстрее обрабатывать данные изображения. Кроме того, дискретный профиль скорости потока упрощает локализацию проблемных участков и инициирование контрмер для конкретного местоположения.
Предпочтительный вариант осуществления изобретения отличается идентификацией локального уменьшения скоростей потока культуры и/или усредненных скоростей потока культуры и интерпретацией такого уменьшения в качестве затора убранной культуры, а также устранения образовавшегося затора регулирующими мерами. В результате нагрузка на оператора транспортного средства снижается, поскольку он более не должен визуально контролировать поток убранной культуры в уборочном устройстве.
Чтобы дополнительно разгрузить оператора и своевременно и эффективно предотвращать образование заторов, в предпочтительном варианте осуществления уборочное устройство содержит мотовило, а меры регулирования в случае образования затора включают в себя уменьшение скорости транспортного средства и/или уменьшение скорости транспортировки убранной культуры в уборочном устройстве и/или смещение мотовила таким образом, чтобы его части, в частности, зубцы мотовила, входили в области потока культуры с распознанным образованием затора.
В следующем предпочтительном варианте осуществления изобретения идентифицируют локальную остановку потока культуры и расценивают ее как затор убранной культуры, после чего устраняют затор убранной культуры дополнительными мерами регулирования, причем к дополнительным мерам регулирования относится остановка или отведение сельскохозяйственной рабочей машины и/или подъем уборочного устройства. При этом, в частности, прекращается подача убранной культуры в уборочное устройство облегчается передача застрявшей культуры на наклонный транспортер путем подъема и, соответственно, наклона уборочного устройства. При этом от оператора не требуется вручную удалять затор.
Краткое описание чертежей
На фигурах изображено:
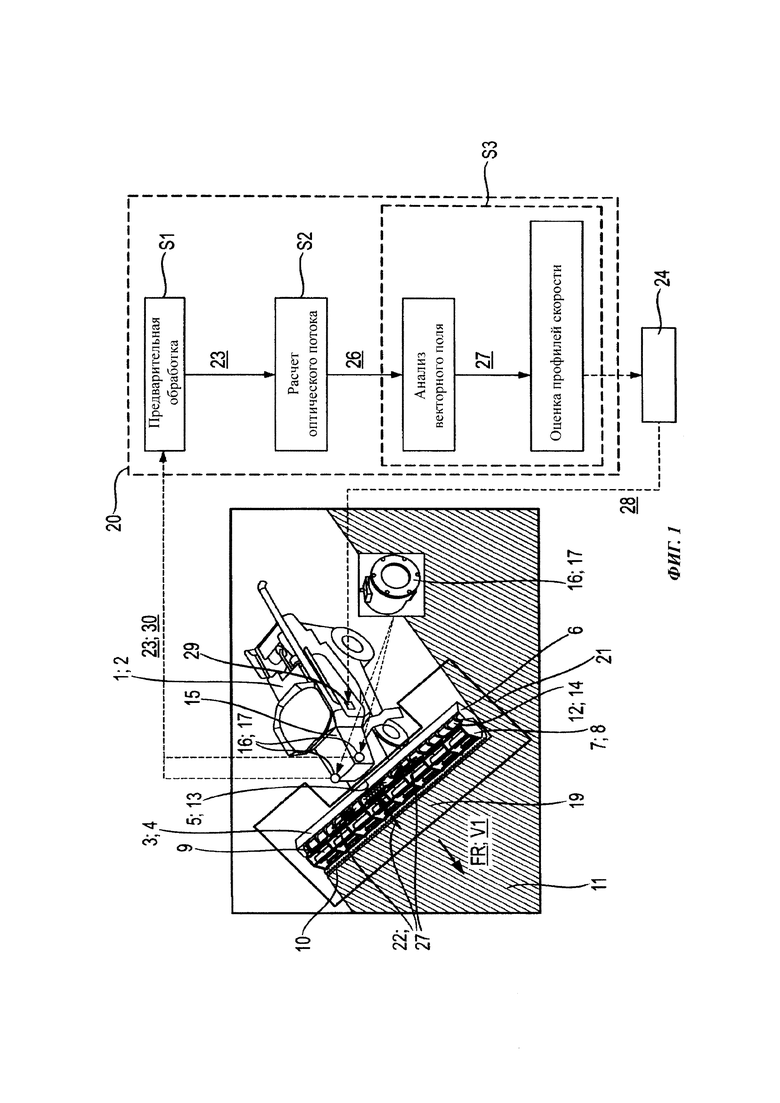
Фигура 1: схематичное изображение в аксонометрии сельскохозяйственной рабочей машины с системой обработки изображений.
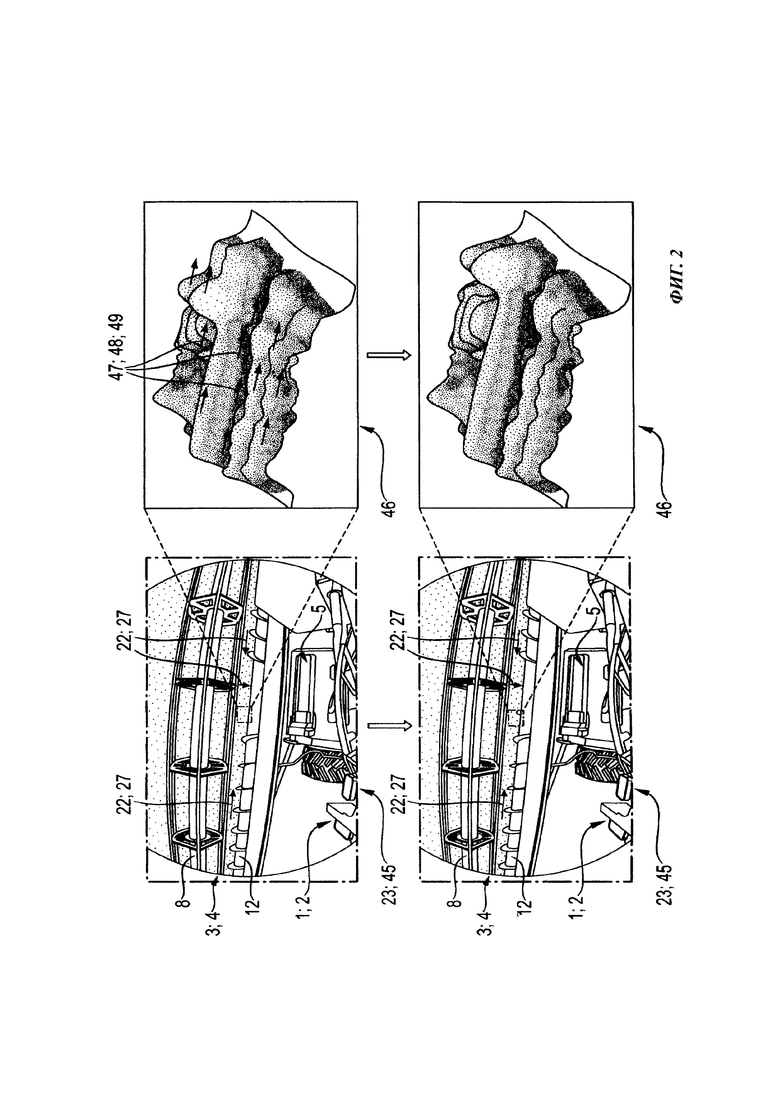
Фигура 2: схематичное представление пары изображений и шаблонов интенсивности.
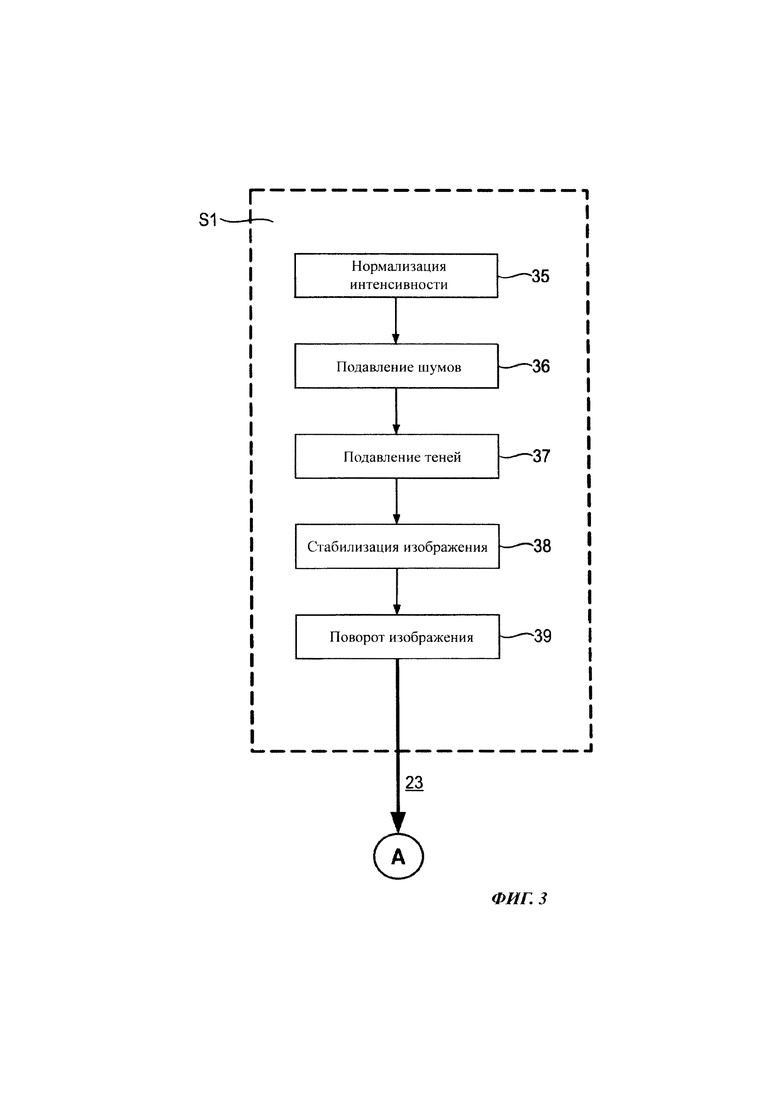
Фигура 3: схема предварительной обработки как первого этапа работы системы обработки изображений.
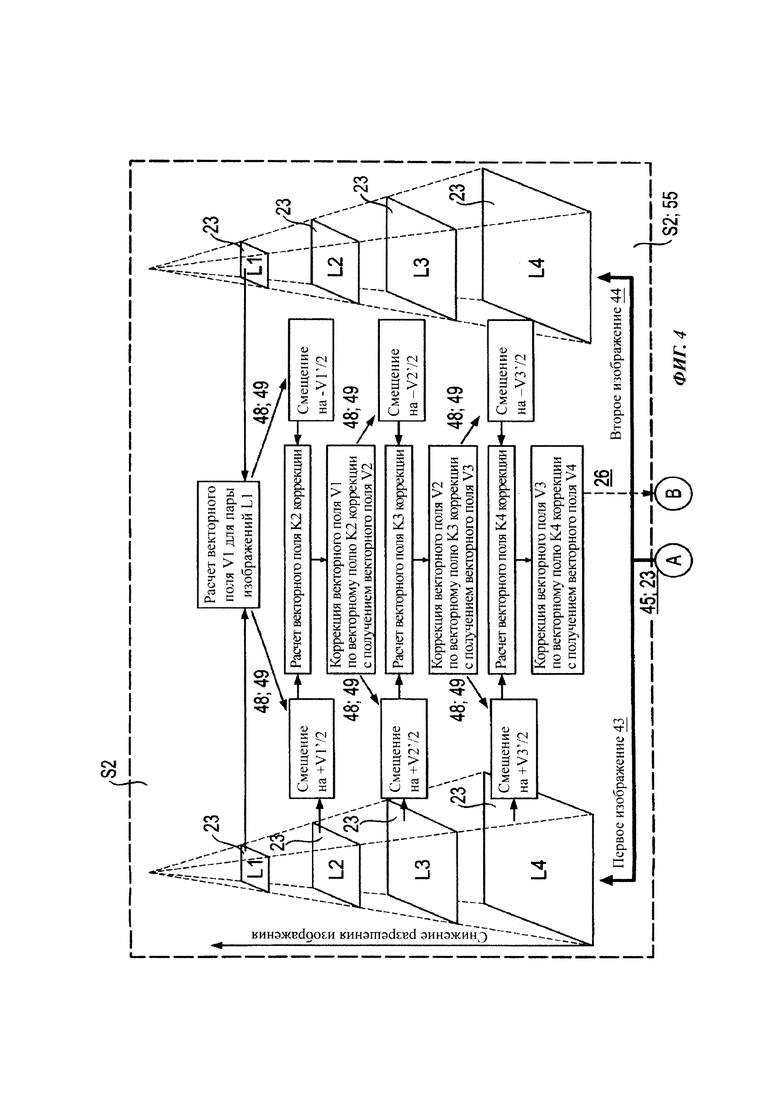
Фигура 4: схема определения оптического потока и соответствующих векторных полей при помощи пирамидального метода Лукаса-Канаде как следующего этапа работы системы обработки изображений.
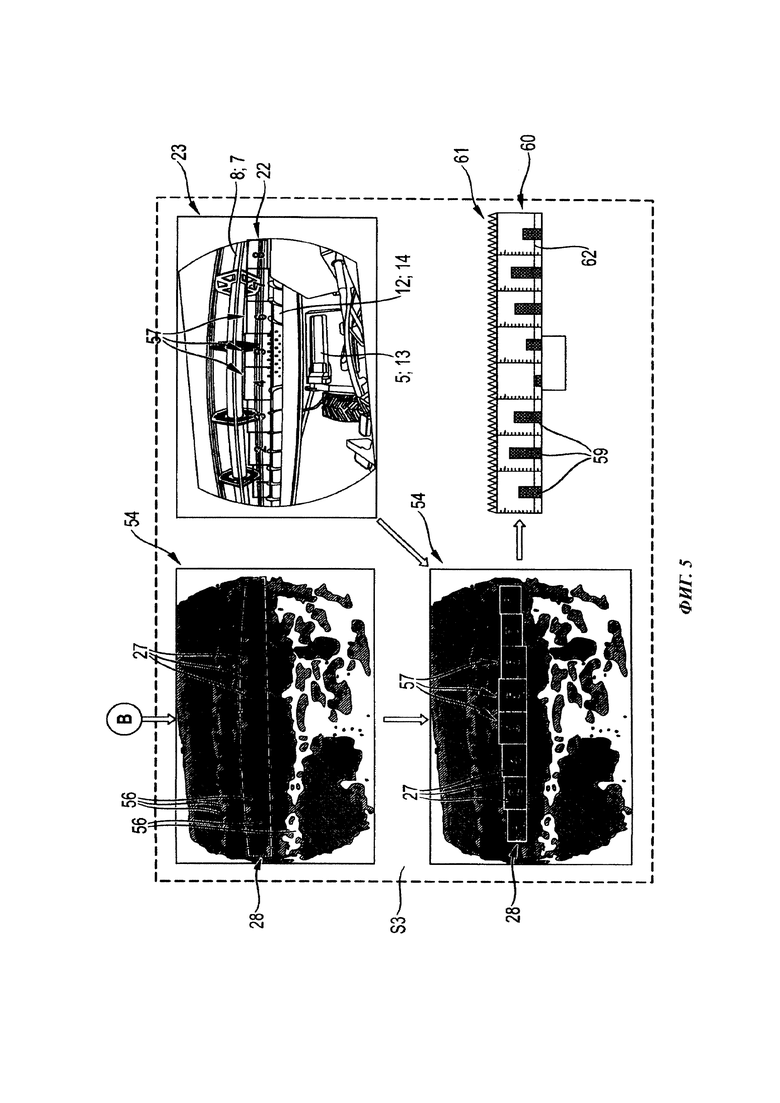
Фигура 5: схематичное представление:
- найденных скоростей профиля скорости
- распределения потока убранной культуры по областям
- дискретного профиля скорости потока убранной культуры
как части следующего этапа работы системы обработки изображений.
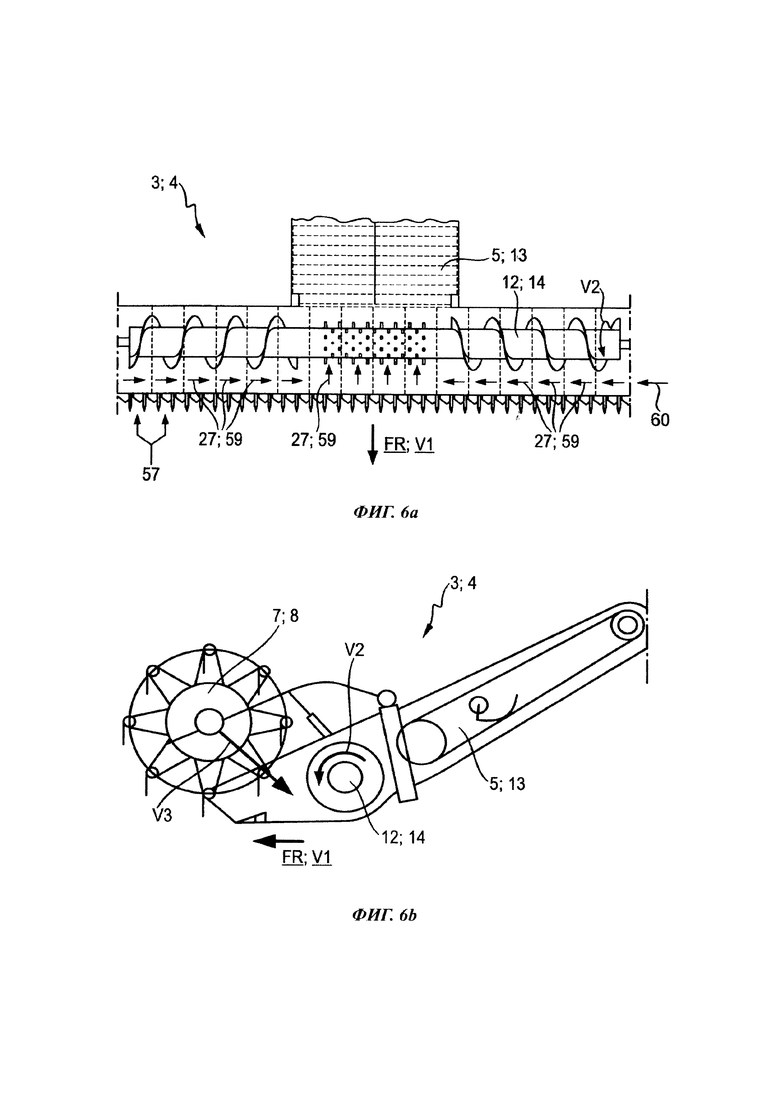
Фигура 6: схематичное изображение уборочного устройства, а именно: а) вид сверху с указанием найденных усредненных скоростей потока; b) вид сбоку с представлением управления уборочным устройством.
Осуществление изобретения
На фигуре 1 схематично и в аксонометрии изображена известная сельскохозяйственная рабочая машина 1, выполненная в виде зерноуборочного комбайна 2 и содержащая уборочное устройство 3, выполненное в виде жатки 4 для зерновых. В альтернативном варианте уборочное устройство 3 может быть выполнено, например, в виде ленточной жатки, режущего аппарата или початкообрывочной приставки. Сельскохозяйственная рабочая машина 1 движется в направлении FR со скоростью V1. Уборочное устройство 3 находится в передней части зерноуборочного комбайна 2 и соединено с зерноуборочным комбайном 2 посредством устройства 13 для втягивания убранной культуры, выполненного в виде наклонного транспортера 5. Уборочное устройство 3 содержит корпус 6 жатки и устройство 10 для срезания культуры, выполненное в виде ножевого бруса с колеблющимися лезвиями. Кроме того, уборочное устройство 3 содержит устройство 8 захвата убранной культуры. Устройство 8 захвата убранной культуры в показанном примере содержит установленное с возможностью перемещения вращения мотовило 7. Мотовило содержит зубцы, предназначенные для захвата убираемой культуры. Мотовило 7 способствует захвату убираемой культуры 9 уборочным устройством 3. Кроме того, устройство 8 для захвата убранной культуры, предпочтительно, содержит стол для резки. Кроме того, уборочное устройство 3 содержит устройство 14 транспортировки убранной культуры, расположенное внутри корпуса 6 жатки, по существу, перпендикулярно направлению FR движения после устройства 10 для резки убранной культуры и выполненное в виде шнека 12 поперечного транспортера. Шнек 12 поперечного транспортера передает убранную культуру 9 в центр уборочного устройства 3, где передает ее на устройство 13 для втягивания убранной культуры, выполненное в виде наклонного транспортера 5. После этого наклонный транспортер 5 передает убранную культуру 9 на молотильный аппарат (не показанный на фигуре) зерноуборочного комбайна 2.
Изобретение учитывает, что устройство 14 для транспортировки убранной культуры, устройство 8 для захвата убранной культуры, устройство 10 для резки убранной культуры и/или устройство 13 для втягивания убранной культуры могут быть выполнены различным образом в зависимости от типа уборочного устройства 3. Например, в случае ленточной / полотенной жатки устройство 14 для транспортировки убранной культуры будет выполнено в виде транспортера с дополнительным направляющим шнеком, а устройство 13 для втягивания убранной культуры 13 может дополнительно содержать подающий вал на входе наклонного транспортера 5.
Предпочтительно, на переднем краю над кабиной 15 зерноуборочного комбайна 2 расположена система 17 датчиков. Система 17 датчиков содержит, по меньшей мере, один оптический датчик, предпочтительно, выполненный в виде камеры 16. Система 17 датчиков выполнена и расположена таким образом, чтобы в поле 21 ее зрения попадал, по меньшей мере, поток 22 убранной культуры в уборочном устройстве 3. Система 17 датчиков формирует изображения 23, по меньшей мере, потока 22 убранной культуры в уборочном устройстве 3. При этом возможно распознавание одной или нескольких частей потока 22 убранной культуры или потока 22 убранной культуры в целом. Кроме того, система 17 датчиков соединена с системой 20 обработки изображений. Система 17 датчиков передает сформированные изображения 23 в систему 20 обработки изображений.
Система 20 обработки изображений служит для обработки сформированных изображений 23 согласно изобретению. Она рассчитана на предварительную обработку переданных изображений 23 на первом этапе S1, определение оптического потока 25 и соответствующих векторных полей 26 на основании предварительно обработанных изображений 23 на следующем этапе S2, выведение профилей 28 скорости потока 22 убранной культуры на основании соответствующих векторных полей 26 и их анализ на следующем этапе S3.
Кроме того, система 20 обработки изображений выполнена с возможностью выведения скоростей 27 потока убранной культуры на основании соответствующего векторного поля 26. Сравнивая, по меньшей мере, два, предпочтительно, последовательных изображения 23 последовательности 30 системы 17 датчиков, можно определить скорости 27 потока убранной культуры путем расчета оптического потока 25 и соответствующих векторных полей 26. Предпочтительно, изображения 23 представляют собой кадры видео, снятые камерой 16. Оптический поток 25 последовательности 30 изображений представляет собой векторное поле 26 скорости 56 видимых точек, проецируемой в плоскость изображения. Предпочтительно, скорости 27 потока культуры локально распределены и, тем самым, входят в множество скоростей 27 потока 22 убранной культуры. Предпочтительно, система 20 обработки изображений выполнена с возможностью анализа скоростей 27 потока убранной культуры. Анализ скоростей 27 потока убранной культуры может выполняться в качестве альтернативы или дополнения к анализу профилей 28 скорости потока культуры. Предпочтительно, профили 28 скорости потока культуры выводят из скоростей 27 потока убранной культуры. Профиль 28 скорости потока культуры соотносит между собой, по меньшей мере, две скорости 27 потока убранной культуры по времени и/или месту. При этом профили 28 скорости потока убранной культуры могут быть составлены в зависимости от пространственного положения и/или времени. Предпочтительно, анализируются постоянно обновляемые пространственные профили 28 скорости потока.
После этого выведенные и проанализированные профили 28 скорости потока культуры поступают в блок 24 вывода данных, соединенный с системой 20 обработки изображений. Предпочтительно, блок 24 вывода данных выполнен в виде интерфейса. Также предпочтительно, блок 24 вывода данных соединен с одной или несколькими системами сельскохозяйственной рабочей машины 1 посредством шины CAN, шины ISO или другой системы передачи данных, в частности, Bluetooth или WLAN. Предпочтительно, блок 24 вывода данных соединен с модулем 29 управления и регулирования и/или с модулем индикации. Предпочтительно, блок 24 вывода данных выполнен с возможностью передачи на модуль 29 управления и регулирования сельскохозяйственной рабочей машины 1 значений скорости 27 потока убранной культуры и/или выведенных и проанализированных профилей 28 скорости потока убранной культуры.
Предпочтительно, система 17 датчиков содержит, по меньшей мере, одну камеру 16. В этом случае последовательность изображений представляет собой видео. В приведенном примере две камеры 16, служащие системами 17 датчиков, расположены на сельскохозяйственной рабочей машине 1. Предпочтительно, на сельскохозяйственной рабочей машине 1 располагают камеры 16 в количестве, достаточном, по меньшей мере, для, предпочтительно, полного распознавания потока 22 убранной культуры в уборочном устройстве 3. Таким образом, количество камер 16 зависит, по существу, от используемых объективов и ширины уборочного устройства 3. В альтернативном варианте можно распознавать только ту область потока 22 убранной культуры, где наиболее вероятно образование затора, например, область потока 22 убранной культуры между устройством 14 для транспортировки убранной культуры и устройством 13 для втягивания убранной культуры.
Предпочтительно, камеры 16 выполнены в виде монохромных камер 16 и/или цветных камер 16. В качестве альтернативы или дополнения можно также использовать инфракрасные камеры 16. Предпочтительно, камеры 16 имеют высокую частоту регенерации изображения / частоту кадров. В более предпочтительном варианте частота кадров превышает 20 кадров в секунду. Также предпочтителен вариант, в котором реализована подсветка уборочного устройства 3 с помощью источника света. При использовании инфракрасной камеры 16 подсветка осуществляется в инфракрасном диапазоне или в диапазоне длин волн, предусмотренном для съемки. Предпочтительно, подсветка может автоматически адаптироваться к интенсивности освещенности окружающей среды.
Предпочтительно, изображения 23 захватывают также примыкающую область 19 вокруг уборочного устройства 3. При этом примыкающая область 19, предпочтительно, содержит область поля в направлении FR движения перед уборочным устройством 3 и/или область поля в направлении FR движения после уборочного устройства 3. Распознавание прилегающей области 19 позволяет оптически определять скорость V1 транспортного средства с помощью способа обработки изображений, описываемого изобретением. Оптически найденную скорость V1 транспортного средства можно впоследствии сравнить с показаниями известной системы измерения скорости сельскохозяйственной рабочей машины 1, не описанной здесь в деталях, и использовать в качестве опорного значения для системы 20 обработки изображений. Предпочтительно, захваченная прилегающая область 19 достигает трех метров перед уборочным устройством 3 и двух метров позади уборочного устройства 3.
Предпочтительно, система 20 обработки изображений представляет собой электронный вычислительный модуль, выполняющий электронную обработку и анализ изображений 23 и/или данных, полученных из изображений 23. Для этого вычислительный модуль, предпочтительно, содержит запоминающее устройство с сохраненными алгоритмами обработки изображений. Данные изображений содержат, например, соответствующие векторные поля 26, скорости 27 потока культуры и/или рассчитанные на их основе данные изображений. Предпочтительно, вычислительный модуль соединен с сельскохозяйственной рабочей машиной 1.
На фигуре 2 схематично представлены два последовательных изображения 43, 44 последовательности 30 изображений, которые можно использовать для вычисления оптического потока 25. Предпочтительно, система 20 обработки изображений группирует каждые два изображения 43, 44 последовательности 30 в пару 45 изображений. В дальнейшем изображения 43, 44 пары называют первым и вторым изображением 43, 44. Предпочтительно, изображения 43, 44 пары 45 непосредственно следуют друг за другом по времени, что дает минимально возможный временной интервал между ними. Кроме того, временной интервал между изображениями 23 распознают и/или предварительно задают. В частности, каждое изображение 23 содержит, по меньшей мере, один шаблон 46 интенсивности. Предпочтительно, шаблон интенсивности представляет собой профиль уровней интенсивности части изображения и/или изображения 23 в целом. Предпочтительно, он отражает уровень интенсивности с соответствующими пространственными координатами на изображении 23 для каждого пикселя и, предпочтительно, окруженного им пикселя изображения 23. Предпочтительно, шаблон имеет размер, соответствующий, по меньшей мере, пикселю, по меньшей мере, с одним окружающим его пикселем. В зависимости от размера шаблона 46 интенсивности каждое изображение 23 содержит, предпочтительно, один или несколько шаблонов 46 интенсивности. Предпочтительно, оптический поток 25 рассчитывают для шаблонов 46 интенсивности каждой пары 45 изображений.
На фигуре 3 схематично показана предварительная обработка в качестве первого этапа S1 работы системы 20 обработки изображений. Предпочтительно, предварительная обработка изображений 23 на первом этапе S1 включает нормализацию 35 интенсивности. Также предпочтительно, предварительная обработка изображений 23 на первом этапе S1 включает подавление 36 шумов. Кроме того, предварительная обработка изображений 23 на первом этапе S1, предпочтительно, включает подавление 37 теней. Кроме того, предпочтительно, предварительная обработка изображений 23 на первом этапе S1 включает стабилизацию 38 изображения. Кроме того, предпочтительно, предварительная обработка изображений 23 на первом этапе S1 включает поворот 39 изображений. В защищаемый объем изобретения входит использование одной или нескольких из перечисленных процедур для предварительной обработки изображений 23. Предпочтительно, предварительную обработку выполняют в порядке, указанном на фигуре 3. Тем не менее, возможны и другие последовательности, что не выходит за рамки изобретения.
Нормализацию 35 интенсивности, предпочтительно, выполняют с помощью эквализации гистограммы. При этом, предпочтительно, на основании распределения интенсивностей на гистограмме рассчитывают, по существу, равномерное распределение, что позволяет максимально использовать весь доступный диапазон интенсивностей. При этом области гистограммы с часто встречающимися значениями интенсивности расширяются, а области гистограммы с менее часто встречающимися значениями интенсивности сжимаются. Возможны и альтернативные методы нормализации 35 интенсивности, в частности, другие гомогенные стандартные преобразования, в частности другие методы на базе гистограммы. Предпочтительно, подавление 36 шумов выполняют с помощью медианного фильтра. При этом, предпочтительно, определяют значения интенсивности пикселей в определенной среде пикселя, сортируют их по размеру и распределяют в иерархическом порядке. После этого выбирают значение интенсивности, находящееся в середине последовательности, и заменяют им значение интенсивности текущего пикселя. В результате, в частности, из изображений 23 удаляются мелкие светлые точки. В альтернативном варианте для подавления 36 шумов можно использовать и другие нелинейные фильтры, в частности, другие фильтры ранжирования. Также предпочтительно подавление 37 теней выполняют с помощью дифференциального фильтра. При этом, предпочтительно, на основании соответствующего изображения 23 вычисляют вспомогательное изображение, причем значения интенсивности пикселей вспомогательного изображения в каждом случае равны среднему значению интенсивности пикселей, окружающих соответствующие пиксели соответствующего изображения 23. После этого, предпочтительно, значения интенсивности вспомогательного изображения вычитают из изображения 23 таким образом, чтобы в итоговом изображении 23 значение интенсивности каждого пикселя было равно отклонению от среднего значения окружающих пикселей исходного изображения 23. При этом отрицательные значения интенсивности приравнивают к 0, а общие значения интенсивности могут быть умножены на поправочный коэффициент. Также предпочтителен вариант, в котором стабилизацию 38 изображения выполняют таким образом, чтобы выбрать на изображении 23 опорную область, присутствующую на всех изображениях 23, например, наклонный транспортер 5, мотовило 7 или другие компоненты сельскохозяйственной рабочей машины 1. После этого, предпочтительно, фиксируют вертикальное и горизонтальное положение опорной области на изображении 23 и выравнивают изображение 23 по нему, вычисляя оптический поток 25 и соответствующие векторные поля 26 для опорной области каждого изображения 23, после чего корректируют положение каждого изображения 23 с помощью соответствующего векторного поля 26 опорной области таким образом, чтобы сотрясения и вибрации кабины 15 транспортного средства и, тем самым, системы 17 датчиков на изображении 23 были сглажены, а зона 21 захвата оставалась, по существу, постоянной. Предпочтительно, для определения оптического потока 25 здесь используют тот же метод, что и на следующем этапе S2. Предпочтительно, при повороте 39 изображения каждое изображение 23 выравнивают по кромкам уборочного устройства 3 и/или сельскохозяйственной рабочей машины 1. Предпочтительно, кромки выравнивают таким образом, чтобы они проходили параллельно или перпендикулярно направлению FR перемещения и/или потоку 22 убранной культуры. Для этого, предпочтительно, выполняют распознавание кромок, в частности, методом преобразования Хоха. После этого предварительно обработанные изображения 23 используют для расчета оптического потока 25 и соответствующих векторных полей 26 на следующем этапе S2.
На следующем этапе S2 для определения оптического потока 25, предпочтительно, рассчитывают сдвиги положения шаблонов 46 интенсивности между изображениями 43, 44, по меньшей мере, одной пары 45 изображений. Таким образом, предпочтительно, с отдельными пикселями шаблонов 46 интенсивности связывают определенные смещения положения. Предпочтительно, смещения положения содержат величины и направления перемещения. Каждое смещение может быть представлено в виде вектора 47. Величины перемещения отражают дальность смещения. Направления перемещения указывают на направление смещения. Величины 48 и/или направления 49 перемещения шаблонов 46 интенсивности для каждой пары 45 изображений, предпочтительно, объединяют как в виде векторов 47 в соответствующем векторном поле 25, в частности, матрице соответствующей пары 45 изображений. Таким образом, предпочтительно, для каждой пары 45 изображений рассчитывают соответствующее векторное поле 26. Таким образом, векторное поле - это связывание группы векторов 47 одной пары 45 изображений в математический член. Предпочтительно, векторы 47 вычисляют по всей площади для шаблонов 46 интенсивности пары изображений 45.
Принимая, что временной интервал между изображениями 43, 44 пары 45 изображений достаточно мал, можно исходить приблизительно из того, что, несмотря на возможность смещения шаблона 46 интенсивности от первого ко второму изображению 43, 44 пары 45 изображений, уровни интенсивности остаются постоянными. В результате путем привязки шаблонов 46 интенсивности пары 31 изображений 31 друг к другу можно определить смещения на изображении 23.
Любое смещение, в зависимости от сформированного изображения 23, может быть двухмерным или трехмерным. Предпочтительны двухмерные смещения. В альтернативном варианте оптический поток 25 можно рассчитать по распознанным признакам изображения и объектам. Для этого обычно требуется предварительное сегментирование изображения в целях распознавания кромок.
На следующем этапе S2 оптический поток 25 и соответствующие векторные поля 26 вычисляют, предпочтительно, с помощью дифференциального метода. При этом дифференциальный метод предполагает формирование градиентной функции, в частности, путем выведения шаблонов 46 интенсивности каждого изображения 23. Для этого, предпочтительно, значения интенсивности частично выводят по времени или пространственному положению. Кроме того, предпочтительно, градиентные функции обоих изображений 23 соответствующей пары 45 изображений вычитают. Предпочтительно, результирующая функция отражает смещение шаблонов 46 интенсивности для соответствующего векторного поля 26 пары 45 изображений. В альтернативном варианте можно определять оптический поток 25 методами фазовой корреляции, блочной или дискретной оптимизации.
Предпочтительно, на следующем этапе S2 в качестве дифференциального метода используют метод Лукаса-Канаде. Предпочтительно, для этого метода делают дополнительное предположение, заключающееся в постоянстве оптического потока 25 в локальном окружении пикселя изображения 23, для которого определяют оптический поток 25. Кроме того, смещения, предпочтительно, малы. Для этого, предпочтительно, выбирают высокую частоту смены кадров, чтобы обеспечить небольшие временные интервалы между изображениями 43, 44 пары 45 изображений. Локальное окружение пикселя может содержать пиксели, примыкающие к данному пикселю и/или окружающие его на некотором удалении. Помимо векторного поля 26, с помощью метода Лукаса-Канаде, предпочтительно, дополнительно рассчитывают матрицу преобразования, учитывающую повороты шаблонов 46 интенсивности, предпочтительно, частей шаблонов 46 интенсивности. В альтернативном варианте можно рассчитать оптический поток 25, например, методом Хорна-Шунка. Кроме того, оптический поток 25 можно вычислить методами, выведенными из метода Лукаса-Канаде и/или метода Хорна-Шунка.
На фигуре 4 схематично представлено определение оптического потока 25 и соответствующих векторных полей 26 в виде следующего этапа S2 работы системы 20 обработки изображений. Расчеты выполняют, предпочтительно, пирамидальным методом 55 Лукаса-Канаде, выведенным из метода Лукаса-Канаде. Для вычисления оптического потока 25 и соответствующих векторных полей 26, предпочтительно, первое, предпочтительно, исходное разрешение изображений 43, 44 каждой пары 45 изображений сокращают, по меньшей мере, до одного следующего разрешения изображения, предпочтительно до множества разрешений изображения. В данном примере оба изображения 43, 44 соответствующей пары 45 изображений представлены в четырех разрешениях и, в частности, связаны с равным количеством уровней L1-L4 разрешения в зависимости от данного разрешения изображения. Разрешения изображений увеличиваются с каждым уровнем L1-L4 разрешения. Первый уровень L1 разрешения содержит изображения 23 с одним из следующих разрешений изображения, в частности, с наименьшим разрешением изображения. Второй уровень L2 разрешения содержит изображения 23 с другим следующим разрешением изображения, в частности, со вторым снизу разрешением. Третий уровень L3 разрешения содержит изображения 23 с еще одним из следующих разрешений изображения, в частности, с третьим снизу разрешением. Четвертый уровень L4 разрешения содержит изображения 23 с первым разрешением изображения, то есть с наивысшим, исходным разрешением изображения.
После этого вычисляют оптический поток 25 и соответствующие векторные поля 26 и многократно корректируют их путем пошагового восстановления первого разрешения изображения. При этом, предпочтительно, сначала рассчитывают оптический поток 25 и первое векторное поле V1 для пары 45 изображений с самым низким разрешением с уровня L1 разрешения. Для этого, предпочтительно, используют метод Лукаса-Канаде. После этого используют величины 48 и направления 49 перемещения первого векторного поля V1, чтобы сдвинуть шаблоны 46 интенсивности первого изображения 43 пары 45 изображений второго уровня L2 разрешения на половину величины 48 перемещения смещения первого векторного поля V1 в направлениях 49 перемещения векторного поля V1, а шаблоны 46 интенсивности второго изображения 44 соответствующей пары 45 изображений второго уровня L2 разрешения на половину величины 48 перемещения первого векторного поля V1 в направлениях, противоположных направлениям 49 перемещения векторного поля V1. После этого на основании двух смещенных шаблонов 46 интенсивности вычисляют векторное поле K2 коррекции второго уровня L2 разрешения. Каждое векторное поле K2-K4 коррекции, таким образом, отражает обусловленную разрешением погрешность в векторном поле предыдущего уровня L1-L3 разрешения. Сначала корректируют первое векторное поле V1 с помощью поля K2 коррекции второго уровня L2 разрешения с получением второго векторного поля V2 из первого векторного поля V1. Второе векторное поле V2 отличается повышенной точностью расчета величин 48 и направлений 49 перемещения. Их используют для описания шаблонов 46 интенсивности изображений 43, 44 соответствующей пары 45 изображений третьего уровня L3 разрешения подобно предыдущему уровню. После этого на основании двух смещенных шаблонов 46 интенсивности вычисляют векторное поле K3 коррекции третьего уровня L3 разрешения. Затем второе векторное поле V2 корректируют по векторному полю K3 коррекции третьего уровня L3 разрешения, получая третье векторное поле V3 из второго векторного поля V2. Третье векторное поле V2 отличается еще более точными величинами 48 и направлениями 49 перемещения. Их используют аналогично вышеописанной процедуре для смещения шаблонов 46 интенсивности изображений 43, 44 четвертого уровня L4 разрешения и вычисления векторного поля K4 коррекции четвертого уровня L4 разрешения на основании шаблонов 46 интенсивности изображений 23 четвертого уровня L4 разрешения. После этого третье векторное поле V3 корректируют по векторному полю K4 коррекции четвертого уровня L4 разрешения, получая четвертое векторное поле V4 из третьего векторного поля V3. Четвертое векторное поле V4, предпочтительно, содержит наиболее точные величины 48 и направления 49 перемещения. Его используют в качестве соответствующего векторного поля 26 на следующем этапе S3.
Отдельные векторные поля V1-V4 и векторные поля K1-K4 коррекции соответствующих уровней L1-L4 разрешения пирамидального метода 55 Лукаса-Канаде, предпочтительно, рассчитывают в каждом случае по методу Лукаса-Канаде, основанному на дифференциальном методе.
Предпочтительно, количество уровней L1-L4 разрешения зависит от первого, то есть исходного разрешения изображений 23 и/или требуемой точности найденных значений. При высоком разрешении изображений 23 можно сильнее уменьшить разрешение изображения и увеличить количество уровней L1-L4 разрешения.
На фигуре 5 скорости 56, найденные из пары 45 изображений, схематично показаны в виде профиля 54 скорости и классификации потока 22 убранной культуры в областях 57 как часть следующего этапа S3 работы системы 20 обработки изображений. Предпочтительно, на следующем этапе S3 рассчитывают скорости 56 на изображениях 23, в частности, скорости 27 потока 22 убранной культуры в уборочном устройстве 3, на основании величин 48 смещения соответствующего векторного поля 26 соответствующей пары 45 изображений и временного интервала между изображениями 43, 44 соответствующих пар 45 изображений. Предпочтительно, скорости 56 представлены в виде профилей 54 скорости. Кроме того, предпочтительно, скорости 27 потока культуры показаны в виде профилей 28 скорости потока убранной культуры. Предпочтительно, профили 28 скорости потока убранной культуры отображают в реальном времени. Для этого весь диапазон скоростей привязывают к цветовой шкале, что позволяет отображать каждую скорость 56 конкретным цветом. Предпочтительно, с каждым пикселем и/или частью изображения соотносят значение скорости 56.
Кроме того, направления 49 перемещения векторного поля 26 соответствующей пары 45 изображений, предпочтительно, используют для распознавания компонентов машины, например, вращающегося мотовила 7, и для их удаления из профиля 54 скорости и исключения из последующих расчетов. Для этого, предпочтительно, каждому направлению назначают свой цвет, предпочтительно, из цветового пространства 360°. После этого направления 49 перемещения каждого векторного поля 26 можно представить в заданном направлении в виде значений цвета, аналогично профилю 54 скорости (не показанному на фигуре).
Кроме того, предпочтительно, на следующем этапе S3 области изображения, отображающие поток 22 убранной культуры, разделяют на участки 57. Предпочтительно, участки 57 примыкают друг к другу. В данном примере поток 22 убранной культуры разделен на восемь участков 57. Участки 57, предпочтительно, переносятся на профили 28 скорости потока культуры.
Кроме того, предпочтительно, для каждого участка 57 определяют усредненную скорость 59 убранной культуры путем расчета среднего значения скорости 27 потока культуры на соответствующем участке 57. Для этого, предпочтительно, определяют соответствующую медиану скоростей 27 потока убранной культуры на соответствующем участке 57. Для этого, предпочтительно, профиль 28 каждой усредненной скорости 59 потока убранной культуры на соответствующем участке 57, зависящий от времени, сглаживают с помощью фильтра, в частности фильтра нижних частот. В альтернативном варианте усреднение выполняют, предпочтительно, путем вычисления среднего арифметического значения. В другом альтернативном варианте усреднение выполняют путем вычисления геометрического, гармонического, квадратного и/или кубического среднего значения и/или взвешенных средних значений.
Количество участков 57, предпочтительно, зависит от величины потока 22 убранной культуры и, тем самым, косвенно от размеров уборочного устройства 3 и/или от требуемого локального разрешения усредненных скоростей 27 потока культуры. Предпочтительно, участки 57 определены на заводе-изготовителе. Также предпочтителен вариант, в котором различные уборочные устройства 3 распознаются автоматически и/или могут быть выбраны вручную из списка. При этом, предпочтительно, система 20 обработки изображений автоматически адаптирует количество, размер и положение участков 57. Предпочтительно, для этого она обращается к базе данных за необходимой информацией. В качестве альтернативы или дополнения оператор средства может вручную изменять участки 57.
Предпочтительно, на следующем этапе S3 из усредненных скоростей 59 потока убранной культуры каждого участка 57 выводят дискретные профили 60 скорости потока убранной культуры и анализируют их. В отношении дискретных профилей 60 потока убранной культуры с каждым участком 57 соотносят усредненную скорость 59 потока культуры. Предпочтительно, дискретные профили 60 потока убранной культуры визуально выводятся оператору. Также предпочтителен вариант, в котором усредненные скорости 59 потока убранной культуры отображают в виде гистограммы на схематическом изображении 61 уборочного устройства 3. Предпочтительно, схематичное изображение 61 также содержит предельные значения 62, указывающие на образовавшийся и/или образующийся затор культуры. Предпочтительно, предельные значения 62 предварительно задаются и/или определяются оператором для идентификации образовавшегося и/или образующегося затора культуры. Предпочтительно, предварительно установленные предельные значения 62 задает изготовитель. Также предпочтителен вариант, в котором предельные значения 62 задают в зависимости от вида зерновых и/или уровня влажности. Модуль 29 управления и регулирования, предпочтительно, выполнен с возможностью генерации предупредительных сигналов для оператора в случае идентификации образовавшегося и/или образующегося затора культуры. Предпочтительно, предупреждающие сигналы носят оптический и/или акустический характер. Предпочтительно, цвет элементов гистограммы зависит от усредненных скоростей 59 потока культуры. Предпочтительно, блок 24 вывода данных направляет дискретные профили 60 скорости культуры из системы 20 обработки изображений в модуль индикации (не показанный на фигуре), находящийся в кабине 15 транспортного средства, и отображаются в нем. Также предпочтителен вариант, в котором дискретные профили 60 скорости потока культуры направляются блоком 24 вывода данных из системы 20 обработки изображений в модуль 29 управления и регулирования.
Предпочтительно, модуль 29 управления и регулирования рассчитан на идентификацию локального уменьшения скорости 27 потока убранной культуры и/или усредненных скоростей 59 потока культуры и интерпретацию этого явления в качестве затора убранной культуры. В альтернативном варианте эту операцию выполняет система 3 обработки изображений. Кроме того, модуль 29 управления и регулирования, предпочтительно, рассчитан на выполнение регулирующих мер 25, направленных на устранение возникающего затора. Возникший затор, предпочтительно, характеризуется значительным снижением скорости 27 потока 22 убранной культуры.
Предпочтительно, к регулирующим мерам относится уменьшение скорости V1 машины. Кроме того, предпочтительно, к регулирующим мерам относится снижение скорости V2 устройства 14 для транспортировки убранной культуры. Предпочтительно, скорость V2 транспортировки убранной культуры описывается частотой вращения поперечного транспортирующего шнека 12. Кроме того, предпочтительно, к регулирующим мерам относится смещение V3 мотовила 7. Таким образом, при этом мотовило 7 перемещают по высоте и/или вперед / назад таким образом, чтобы его части входили в участки потока 22 убранной культуры с идентифицированным затором. В частности, части мотовила 7 содержат зубцы.
Предпочтительно, модуль 29 управления и регулирования выполнен с возможностью идентификации локальной остановки потока 22 убранной культуры и его интерпретации в качестве затора. Кроме того, модуль 29 управления и регулирования, предпочтительно, выполнен с возможностью осуществления дополнительных регулирующих мер для устранения затора. Предпочтительно, к дополнительным регулирующим мерам относится остановка или отведение сельскохозяйственной рабочей машины 1. Кроме того, предпочтительно, к дополнительным регулирующим мерам относится подъем уборочного устройства 3. При подъеме уборочного устройства 3 изменяется, в частности, наклон уборочного устройства 3. Затор, предпочтительно, представляет собой локальную остановку потока 22 убранной культуры. Затор имеет место, предпочтительно, при локальной скорости 27 потока и/или, по меньшей мере, одной усредненной скорости потока 59 культуры равной нулю или приближенной к нулю метров в минуту. Кроме того, систему можно настроить на распознавание затора при локальных низких скоростях 27 потока убранной культуры. Возникновение затора, предпочтительно, распознается в том случае, если уменьшаются локальные скорости потока культуры и/или, по меньшей мере, одна усредненная скорость потока, в частности, уменьшаются значительно.
Предпочтительно, модуль 29 управления и регулирования передает управляющие сигналы на приводы, предназначенные для управления мотовилом 7, устройством 14 транспортировки убранной культуры и/или скоростью V1 машины. Приводы могут содержать клапаны, редукторы, гидромоторы, гидронасосы и/или дополнительные исполнительные элементы.
Кроме того, в рамках изобретения, предпочтительно, предусмотрено увеличение скорости V1 машины, в частности, при высоких усредненных скоростях 59 потока культуры, в частности, при максимальных усредненных скоростях 59 потока культуры. Это позволяет избежать неоптимального потока 22 убранной культуры в уборочном устройстве 3.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 сельскохозяйственная рабочая машина
2 зерноуборочный комбайн
3 уборочное устройство
4 жатка
5 наклонный транспортер
6 корпус жатки
7 мотовило
8 устройство для захвата убранной культуры
9 убранная культура
10 устройство для резки убранной культуры
11 убираемая культура
12 поперечный транспортирующий шнек
13 устройство для втягивания убранной культуры
14 устройство для транспортировки убранной культуры
15 кабина
16 камера
17 система датчиков
19 окружающее пространство
20 система обработки изображений
21 поле захвата
22 поток убранной культуры
23 изображения
24 блок вывода данных
25 оптический поток
26 соответствующее векторное поле
27 скорость потока культуры
28 профиль скорости потока культуры
29 модуль управления и регулирования
30 последовательность изображений
35 нормализация интенсивности
36 подавление шумов
37 подавление теней
38 стабилизация изображения
39 поворот изображения
43 первое изображение пары
44 второе изображение пары
45 пара изображений
46 шаблон интенсивности
47 вектор
48 величины смещения
49 направления смещения
54 профиль скорости
55 пирамидальный метод Лукаса-Канаде
56 скорость
57 участки
59 усредненная скорость потока культуры
60 дискретные профили скорости потока культуры
61 схематичное изображение уборочного устройства
62 предельное значение
V1 скорость машины
V2 скорость устройства транспортировки убранной культуры
V3 смещение мотовила
K2 векторное поле коррекции второго уровня разрешения
K3 векторное поле коррекции третьего уровня разрешения
K4 векторное поле коррекции четвертого уровня разрешения
L1 первый уровень разрешения
L2 второй уровень разрешения
L3 третий уровень разрешения
L4 четвертый уровень разрешения
S1 первый этап работы системы обработки изображений
S2 второй этап работы системы обработки изображений
S3 третий этап работы системы обработки изображений
FR направление движения
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ ОТСЛЕЖИВАНИЯ УБОРОЧНОГО УСТРОЙСТВА ДЛЯ УБИРАЕМОГО МАТЕРИАЛА ТАКОЙ МАШИНЫ | 2019 |
|
RU2796971C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2020 |
|
RU2816642C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ (ВАРИАНТЫ) | 2019 |
|
RU2784488C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УСТРОЙСТВОМ ОБНАРУЖЕНИЯ ПОСТОРОННИХ ТЕЛ | 2008 |
|
RU2466527C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПЕРЕВАЛКИ | 2015 |
|
RU2683040C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ ПРИ УБОРКЕ УРОЖАЯ ТАКОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНОЙ | 2021 |
|
RU2834932C2 |
| СПОСОБ НАСТРОЙКИ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО РАБОЧЕГО ОРГАНА САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2569958C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
Изобретение относится к сельскому хозяйству. Сельскохозяйственная рабочая машина, в частности самоходная уборочная машина с уборочным устройством, содержащим устройство для срезания убираемой культуры, устройство для захвата убранной культуры и/или устройство для втягивания убранной культуры и, по меньшей мере, одно устройство для транспортировки убранной культуры. Самоходная уборочная машина содержит систему обработки изображений, блок вывода данных, и, по меньшей мере, одну систему датчиков, связанную с уборочным устройством и предназначенную для распознавания потока убранной культуры в уборочном устройстве. Система датчиков соединена с системой обработки изображений для передачи изображений. Обеспечена передача изображений, созданных системой датчиков, в систему обработки изображений, обрабатывающую набор доступных изображений. Система обработки изображений на первом этапе предварительно обрабатывает переданные изображения; на следующем этапе формирует из предварительно обработанных изображений оптический поток и соответствующие векторные поля; на следующем этапе выводит из соответствующих векторных полей профили скорости потока убранной культуры и анализирует их. Обеспечивается точность, надежность и своевременность контроля потока убираемой сельскохозяйственной культуры. 14 з.п. ф-лы, 7 ил.
1. Сельскохозяйственная рабочая машина (1), в частности самоходная уборочная машина с уборочным устройством (3), содержащим устройство (10) для срезания убираемой культуры, устройство (8) для захвата убранной культуры и/или устройство для втягивания убранной культуры и по меньшей мере одно устройство (14) для транспортировки убранной культуры, и с системой (20) обработки изображений, блоком вывода данных и по меньшей мере одной системой (17) датчиков, связанной с уборочным устройством (3) и предназначенной для распознавания потока (22) убранной культуры в уборочном устройстве (3), причем система (17) датчиков соединена с системой (20) обработки изображений для передачи изображений (23), причем обеспечена передача изображений, созданных системой датчиков, в систему обработки изображений, причем система (20) обработки изображений обрабатывает набор доступных изображений (23), отличающаяся тем, что система (20) обработки изображений на первом этапе (S1) предварительно обрабатывает переданные изображения (23), на следующем этапе (S2) формирует из предварительно обработанных изображений (23) оптический поток (25) и соответствующие векторные поля (26), и на следующем этапе (S3) выводит из соответствующих векторных полей (26) профили (28) скорости потока (22) убранной культуры и анализирует их.
2. Сельскохозяйственная рабочая машина (1) по п. 1, отличающаяся тем, что по меньшей мере одна система (17) датчиков представляет собой камеру (16), причем камера (16) выполнена, в частности, в виде монохромной и/или цветной камеры (16).
3. Сельскохозяйственная рабочая машина (1) по одному из предыдущих пунктов, отличающаяся тем, что изображения (23) уборочного устройства (3) захватывают, в том числе, примыкающее окружающее пространство (19), содержащее, в частности, область поля в направлении (FR) движения перед уборочным устройством (3) и/или область поля в направлении (FR) движения за уборочным устройством (3).
4. Сельскохозяйственная рабочая машина (1) по одному из предыдущих пунктов, отличающаяся тем, что система (20) обработки изображений представляет собой электронный вычислительный модуль, в частности, связанный с сельскохозяйственной рабочей машиной (1) и выполненный с возможностью электронной обработки и анализа изображений (23) и/или данных, полученных из изображений (23).
5. Сельскохозяйственная рабочая машина (1) по п. 1, отличающаяся тем, что предусмотрена возможность группировки каждых двух, в частности двух следующих друг за другом изображений (23) последовательности (30) в пару (45) изображений, регистрации и/или предварительному заданию периода между изображениями (43, 44) соответствующей пары (45) и присвоения каждому изображению (43, 44) шаблона (46) интенсивности.
6. Сельскохозяйственная рабочая машина (1) по п. 1, отличающаяся тем, что на первом этапе (S1) выполняют предварительную обработку изображений (23), включающую нормализацию (35) интенсивности, подавление (36) шумов, подавление (37) теней, стабилизацию (38) изображения и/или поворот (39) изображения.
7. Сельскохозяйственная рабочая машина (1) по п. 1, отличающаяся тем, что на следующем этапе (S2) для определения оптического потока (25) распознают сдвиги положения шаблонов (46) интенсивности между изображениями (43, 44) по меньшей мере одной пары (45) изображений, причем сдвиги положения содержат величины и направления перемещения, а величины (48) и/или направления (49) перемещения шаблонов (46) интенсивности каждой пары (45) изображений объединяют в виде векторов (47) в соответствующем векторном поле (26), в частности в матрице соответствующей пары (45) изображений.
8. Сельскохозяйственная рабочая машина (1) по п. 7, отличающаяся тем, что на следующем этапе (S2) оптический поток (25) и соответствующие векторные поля (26) определяют дифференциальным методом, согласно которому, в частности, путем выведения шаблона (46) интенсивности соответствующего изображения (23) получают градиентную функцию, градиентные функции обоих изображений (43, 44) соответствующей пары (45) изображений вычитают и получают результирующую функцию, отражающую смещения шаблонов (46) интенсивности для соответствующего векторного поля (26) пары (45) изображений.
9. Сельскохозяйственная рабочая машина (1) по п. 8, отличающаяся тем, что на следующем этапе (S2) в качестве дифференциального метода используют метод Лукаса-Канаде, предполагающий постоянство оптического потока (25) в локальном окружении пикселя изображения, для которого определен оптический поток (25).
10. Сельскохозяйственная рабочая машина (1) по п. 9, отличающаяся тем, что на следующем этапе (S2) в качестве метода Лукаса-Канаде используют пирамидальный метод (55) Лукаса-Канаде, в котором первое разрешение изображений (43, 44) каждой пары (45) для расчета оптического потока (25) и соответствующих векторных полей (26) сокращают по меньшей мере до одного следующего разрешения изображения, после чего рассчитывают оптический поток (25) и соответствующие векторные поля (26) и многократно корректируют их с пошаговым восстановлением первого разрешения изображения.
11. Сельскохозяйственная рабочая машина (1) по п. 1, отличающаяся тем, что на следующем этапе (S3) рассчитывают скорости (56)в изображениях (23), в частности скорости (27) потока (22) культуры в уборочном устройстве (3), на основании величин (48) смещения соответствующего векторного поля (26) соответствующей пары (45) изображений и периода между изображениями (43, 44) соответствующей пары (45), и отображают в виде профилей (54) скорости потока (22) культуры, в частности убранной культуры.
12. Сельскохозяйственная рабочая машина (1) по п. 11, отличающаяся тем, что на следующем этапе (S3) области изображения, отображающие поток (22) культуры, распределяют по участкам (57), и рассчитывают усредненную скорость (59) потока культуры для каждого участка (57) путем вычисления среднего значения скоростей (27) потока культуры на соответствующем участке (57), в частности, путем формирования медианы, после чего выводят и анализируют дискретные профили (60) скоростей потока культуры на основании усредненных скоростей (59) потока культуры на каждом участке (57).
13. Сельскохозяйственная рабочая машина (1) по одному из предыдущих пунктов, отличающаяся тем, что осуществляют идентификацию локального уменьшения скоростей (27) потока культуры и/или усредненных скоростей (59) потока культуры и интерпретируют такое уменьшение как затор убранной культуры, и устраняют образовавшийся затор регулирующими мерами.
14. Сельскохозяйственная рабочая машина (1) по одному из предыдущих пунктов, отличающаяся тем, что устройство (8) для захвата убранной культуры содержит мотовило (7), а меры регулирования в случае образования затора включают в себя уменьшение скорости (V1) транспортного средства и/или уменьшение скорости (V2) транспортировки убранной культуры в устройстве (14) транспортировки культуры и/или смещение (V3) мотовила (7) таким образом, чтобы его части, в частности зубцы мотовила, входили в области потока (22) культуры с распознанным образованием затора.
15. Сельскохозяйственная рабочая машина (1) по одному из предыдущих пунктов, отличающаяся тем, что осуществляют идентификацию локальной остановки потока (22) убранной культуры и интерпретируют ее в качестве затора убранной культуры, и устраняют затор убранной культуры дополнительными мерами регулирования, причем дополнительные меры регулирования включают в себя остановку или отведение сельскохозяйственной рабочей машины (1) и/или подъем уборочного устройства (3).
| DE 102008032191 A1, 14.01.2010 | |||
| US 2012004815 A1, 05.01.2012 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ С ЖАТВЕННЫМ АППАРАТОМ И ИЗМЕЛЬЧИТЕЛЬНО-РАСПРЕДЕЛИТЕЛЬНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) | 2004 |
|
RU2355155C2 |
| Устройство контроля технологического процесса сельскохозяйственных машин | 1989 |
|
SU1697613A1 |

