Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах, имеющих в своем составе антенную систему (АС), диаграмма направленности (ДН) которой периодически искажается вследствие взаимодействия с вращающимся несущим винтом винтокрылого летательного аппарата (ЛА).
Из уровня техники известны различные системы моноимпульсной радиолокации, имеющие уменьшенные ошибки пеленгации целей (определения углового направления на цели).
Известна система для определения координат цели в системе запрос - ответ, защищенная патентом RU 2631117 С1. Система использует антенну, выполненную в виде одномерной антенной решетки, ДН которой имеет вид круглой воронки, при этом ось вращения воронки совпадает с направлением раскрыва решетки, а также датчики углового положения антенны, направляемой на цель, цифровое вычислительное устройство, выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, и датчик высоты. Повышение точности определения координат цели достигается тем, что система использует математическое описание ДН антенны, отклонение в локальной системе координат антенны направления ответных сигналов от плоскости, перпендикулярной направлению раскрыва антенны и проходящей через центр раскрыва антенны, и дальность до цели. Указанные параметры используются для определения плоскости, в которой расположена цель (плоскости пеленга цели), перпендикулярной направлению раскрыва антенны. Вычисление координат цели производится с использованием математических выражений, определяющих плоскость, в которой расположена цель, сферу равной дальности до цели и плоскость высоты цели.
Известна также система моноимпульсной радиолокации с повышенной точностью определения пеленга цели и сохраненной взаимозаменяемостью антенны в составе системы, защищенная патентом RU 2755796 С2, включающая в себя в том числе АС с запоминающим устройством, сохраняющим характеристики экземпляра АС в виде коэффициентов степенного полинома, и вычислительное устройство, извлекающее коэффициенты степенного полинома и использующее их при определении пеленга цели путем вычисления значения степенного полинома с извлеченными коэффициентами. Данная система принята в качестве прототипа.
Указанным системам присущ недостаток, заключающийся в том, что при размещении систем на винтокрылом ЛА невозможно избежать искажения диаграммы направленности АС вследствие взаимодействия электромагнитного поля АС с конструктивными частями ЛА (например, с лопастями вращающегося несущего винта винтокрылого ЛА). Соответственно, при взаимодействии электромагнитного поля АС с лопастями несущего винта ЛА, для первой известной из уровня техники системы ДН антенны, будет отличаться от круглой воронки, а для второй известной из уровня техники системы искаженная ДН антенны будет описываться другими значениями коэффициентов степенного полинома. В зависимости от текущего положения лопастей несущего винта ЛА, ДН антенны будет периодически искажаться при прохождении каждой лопасти несущего винта ЛА вблизи антенны.
При установке указанных систем моноимпульсной радиолокации на винтокрылые ЛА возникает техническая проблема, делающая невозможным выполнение требований к указанным системам в части допустимой величины ошибки пеленгации цели. Техническая проблема заключается в том, что ДН АС периодически искажается вследствие нарушения однородности электромагнитного поля АС, при этом пеленгация цели производится с дополнительными ошибками, возникающими вследствие искажения ДН АС. Из-за наличия лопасти несущего винта в секторе раскрыва АС однородность электромагнитного поля АС периодически нарушается, что приводит к искажению ДН АС. Можно показать, что для пятилопастного несущего винта ЛА лишь для диапазона примерно от 20 до 30% от полного углового сектора между лопастями искажение ДН АС («затенение» АС лопастями несущего винта ЛА) является приемлемым для правильного функционирования системы моноимпульсной радиолокации в части пеленгации цели. Лишь в этом диапазоне угловых направлений равносигнального направления (РСН) ДН АС ошибка пеленгации цели системой моноимпульсной радиолокации будет приемлемой.
Технический результат, достигаемый изобретением, заключается в уменьшении до приемлемых значений ошибки пеленгации цели, связанной с периодическим искажением ДН АС системы моноимпульсной радиолокации вследствие периодического влияния лопасти несущего винта винтокрылого ЛА на электромагнитное поле АС. Технический результат достигается тем, что на стадии разработки, в том числе при испытаниях опытных образцов винтокрылого ЛА, расчетным и/или экспериментальным путем определяют (задают) угловое значение (заданное значение) отклонения РСН ДН АС от углового направления лопасти несущего винта ЛА, при превышении которого лопасть не оказывает недопустимого влияния на ДН АС. Система моноимпульсной радиолокации, установленная на винтокрылом ЛА, использует указанное заданное значение для определения допустимости пеленгации цели: если текущее угловое положение РСН ДН АС отличается от текущего углового положения каждой лопасти несущего винта ЛА на значение не менее заданного значения, то РСН ДН АС расположена в одном из «чистых» угловых интервалов между лопастями и пеленгация цели возможна, если текущее угловое положение РСН ДН АС отличается от текущего углового положения одной из лопастей несущего винта ЛА на значение менее заданного, то РСН ДН АС расположена в угловом интервале, затеняемом этой лопастью (в «затененном» угловом интервале), и пеленгация цели не производится.
Неожиданным техническим результатом, достигаемым изобретением, является возможность применения системы для пеленгации цели с уменьшенной до приемлемых значений ошибкой пеленгации в диапазоне азимутальных направлений РСН ДН антенны от 0° до 360° относительно строительной оси ЛА.
Другим неожиданным техническим результатом, достигаемым изобретением, является возможность использования сигнала от введенного в систему дополнительного датчика другими системами ЛА, например, в качестве преобразователя угла поворота с импульсообразующим элементом при осуществлении способа оценки технического состояния механизма с зубчатыми колесами по авторскому свидетельству SU 1688658 А1.
Во время эксплуатации системы, в текущий момент, который является моментом времени пеленгации цели, система моноимпульсной радиолокации определяет угловое положение лопастей несущего винта ЛА относительно строительной оси ЛА и угловое положение связанных с лопастями «затененных» угловых интервалов. С учетом углового положения РСН ДН АС относительно строительной оси ЛА в момент времени пеленгации цели система определяет взаимное угловое положение РСН ДН АС с угловым положением лопастей несущего винта ЛА. Система определяет, попадает ли текущее угловое положение РСН ДН АС в один из «затененных» угловых интервалов, в котором соответствующая лопасть недопустимо искажает ДН АС, и по результатам определения проводит или не проводит пеленгацию цели (или разрешает или не разрешает проведение пеленгации цели).
Для определения текущего положения «затененных» угловых интервалов относительно строительной оси ЛА в систему введен дополнительный датчик, соединенный с вычислительным устройством системы. Датчик вырабатывает импульс (например - электрический, или световой с последующим преобразованием в форму, к которой чувствительно вычислительное устройство системы) в момент прохождения вращающегося несущего винта ЛА через известное, определенное конструкцией винтокрылого ЛА, угловое положение несущего винта ЛА относительно строительной оси ЛА. Система фиксирует (измеряет) времена появления очередного и предыдущего импульсов от датчика, по измеренным значениям времени появления импульсов определяет временной интервал между текущим моментом, для которого определяется возможность пеленгации цели, и очередным импульсом, и временной интервал между очередным и предыдущим импульсами. Текущее положение «затененных» угловых интервалов относительно строительной оси ЛА система определяет, используя значение временного интервала между текущим моментом времени и очередным полученным импульсом, значение временного интервала между очередным и предыдущим полученными импульсами, известное положение лопастей несущего винта ЛА в момент выработки импульса и заданное значение, определяющее угловой интервал, в пределах которого искажение электромагнитного поля АС лопастями несущего винта ЛА превышает допустимые пределы.
Система проверяет возможность определения углового направления на цель (возможность пеленгации цели) для текущего момента времени, определяя текущее угловое положение РСН ДН АС относительно текущего положения лопастей несущего винта ЛА и связанных с ними «затененных» угловых интервалов для каждой лопасти несущего винта ЛА. Если текущее направление РСН ДН АС не попадает ни в один из «затененных» угловых интервалов, то пеленгация цели в текущий момент времени возможна и проводится, а результаты пеленгации система использует для определения угловых координат цели, в противном случае сигналы от цели могут быть использованы для получения других характеристик цели.
Таким образом, заявляемая система обеспечивает проведение пеленгации цели исключительно в периоды времени, в которых РСН ДН АС не попадает ни в один из «затененных» угловых интервалов между лопастями вращающегося несущего винта ЛА, и ошибка пеленгации, вызываемая искажением ДН АС лопастями несущего винта ЛА, оказывается приемлемой для целей пеленгации.
Сущность изобретения и его осуществление поясняется рисунками Фиг. 1, Фиг. 2 и Фиг. 3.
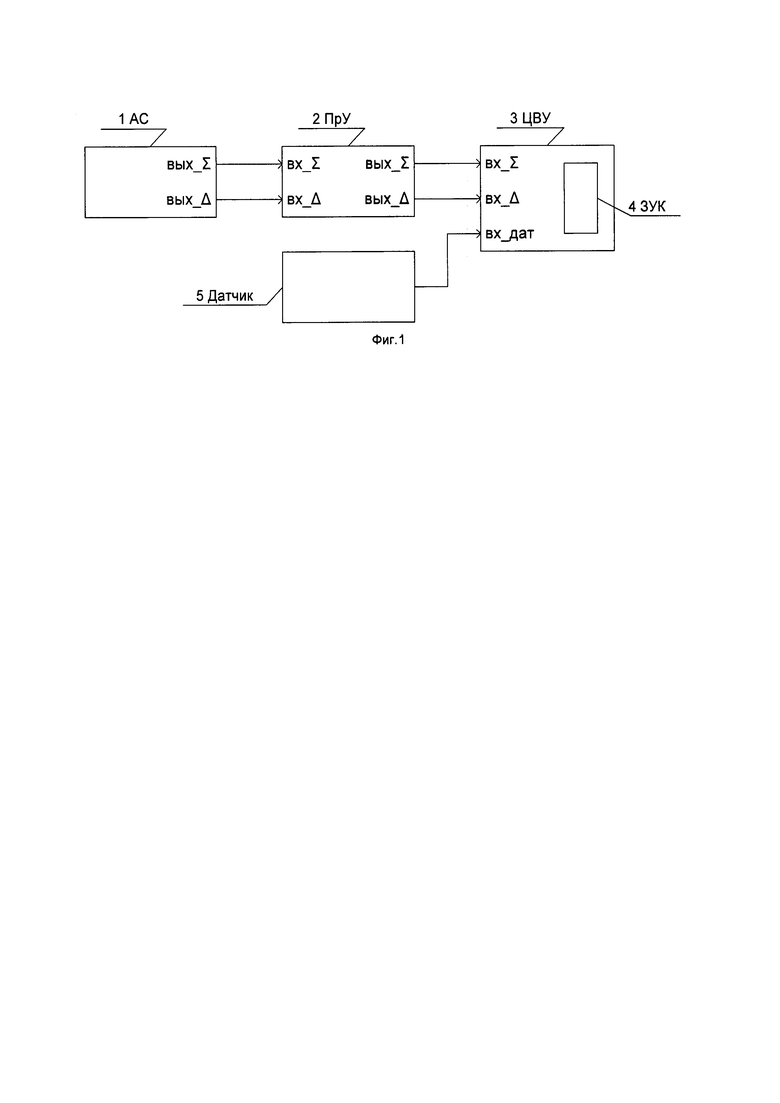
На Фиг. 1 представлена структурная схема системы. На Фиг. 1 изображены:
- антенная система АС 1, имеющая суммарный «вых_Σ» и разностный «вых_Δ» выходы;
- приемное устройство ПрУ 2, имеющее суммарный «вх_Σ» и разностный «вх_Δ» входы, и суммарный «вых_Σ» и разностный «вых_Δ» выходы;
- цифровое вычислительное устройство ЦВУ 3, имеющее суммарный «вх_Σ» и разностный «вх_Δ» входы и дополнительный вход «вх_дат» для приема электрического импульса от датчика;
- запоминающее устройство команд ЗУК 4, входящее в состав цифрового вычислительного устройства 3;
- датчик 5;
- связи между составными частями системы.
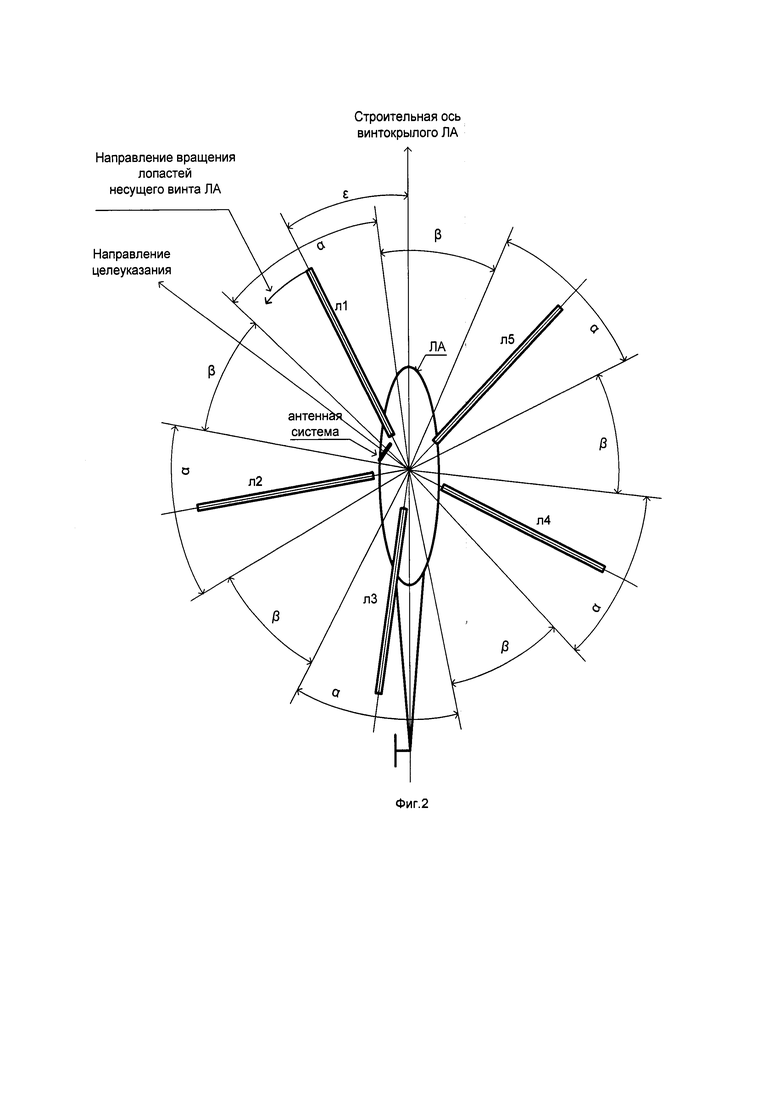
На Фиг. 2, поясняющей условные обозначения лопастей несущего винта ЛА и их взаимное расположение в момент выработки импульса, представлены:
- винтокрылый ЛА;
- лопасти л1-л5 несущего винта винтокрылого ЛА в положении, соответствующем моменту времени выработки импульса;
- антенная система АС системы моноимпульсной радиолокации, ДН которой или сама АС развернуты в направлении цели;
- угол ε положения лопасти л1 несущего винта ЛА в момент выработки импульса и направление вращения лопастей;
- «затененные» угловые интервалы α, в пределах которых влияние «затенения» АС лопастями несущего винта ЛА на ошибку пеленгации цели превышает допустимые пределы;
- «чистые» угловые интервалы β, в пределах которых влияние «затенения» АС на ошибку пеленгации цели не превышает допустимых пределов.
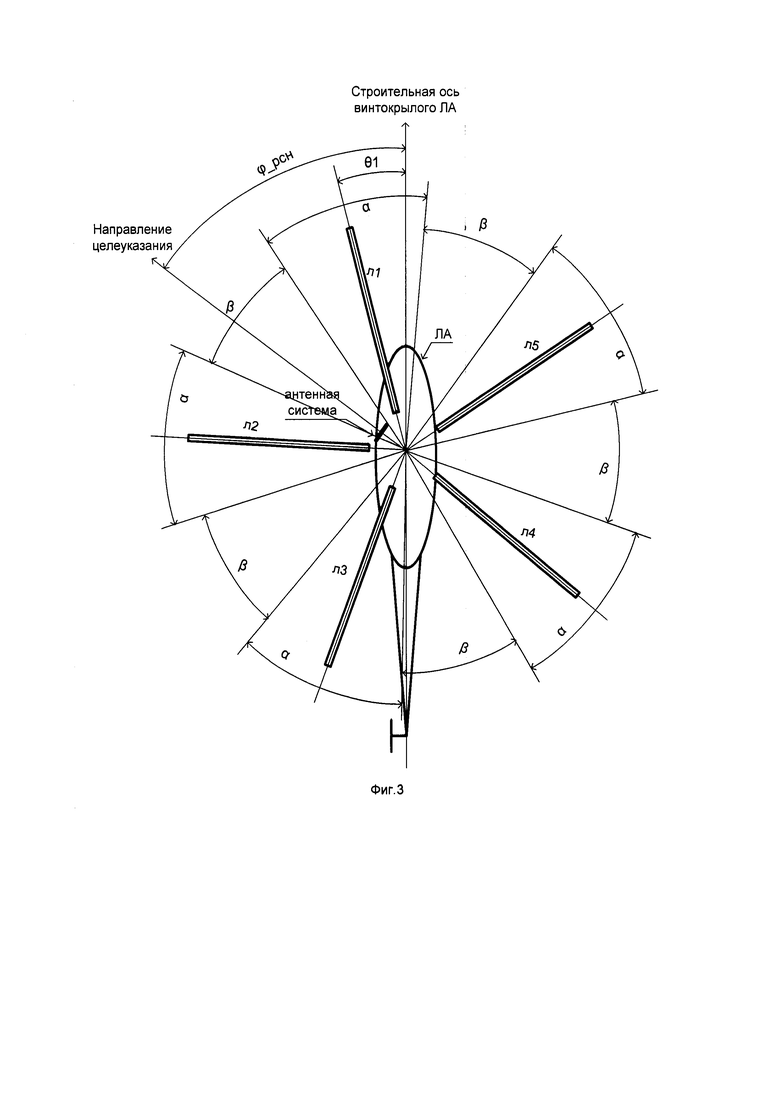
На Фиг. 3, поясняющей положение лопастей несущего винта ЛА в момент времени пеленгации цели, представлены:
- винтокрылый летательный аппарат ЛА;
- лопасти л1-л5 несущего винта винтокрылого ЛА в момент времени пеленгации цели;
- антенная система АС системы моноимпульсной радиолокации, ДН которой или сама АС развернуты в направлении цели;
- «затененные» угловые интервалы α, в пределах которых влияние «затенения» АС лопастями несущего винта ЛА на ошибку пеленгации цели превышает допустимые пределы;
- «чистые» угловые интервалы β, в пределах которых влияние «затенения» АС на ошибку пеленгации цели не превышает допустимых пределов;
- текущее угловое положение θ1 лопасти л1 несущего винта ЛА относительно строительной оси ЛА;
- угловое направление ϕ_рсн РСН ДН АС относительно строительной оси ЛА.
Сущность изобретения заключается в том, что:
- в систему моноимпульсной радиолокации, установленную на винтокрылом ЛА, при этом ДН АС периодически искажается в результате взаимодействия АС с лопастями несущего винта ЛА, содержащую АС, приемное устройство и цифровое вычислительное устройство (ЦВУ), содержащее запоминающее устройство команд (ЗУК), при этом суммарный и разностный выходы АС соединены с соответствующими входами приемного устройства, суммарный и разностный выходы которого соединены с соответствующими входами ЦВУ, дополнительно введен датчик, выход которого соединен с дополнительным входом ЦВУ, вырабатывающий импульс при определенном угловом положении лопастей несущего винта ЛА относительно строительной оси ЛА;
- в состав ЗУК введена последовательность команд, исполняемых ЦВУ при эксплуатации системы, реализующих определение взаимного углового положения равносигнального направления (РСН) диаграммы направленности (ДН) АС и углового положения лопастей несущего винта ЛА для момента времени пеленгации цели с использованием измеренных системой момента времени пеленгации цели, моментов времени получения очередного и предыдущего импульсов от датчика и значения углового положения лопастей несущего винта ЛА в момент выработки импульса, и разрешающих определение углового направления на цель, если угловое положение РСН ДН АС отличается от углового положения каждой лопасти несущего винта ЛА в момент времени определения углового направления на объект на значение не менее заданного. Последовательность команд, исполняемых ЦВУ при эксплуатации системы, реализует выполнение следующих действий:
1. При выработке очередного импульса датчиком система фиксирует момент времени t1 появления очередного импульса, соответствующего углу ε положения лопасти л1 несущего винта ЛА относительно строительной оси ЛА.
2. Используя ранее зафиксированный момент времени t2 появления предыдущего импульса, система вычисляет разницу
Т=t1-t2,
которая соответствует периоду предыдущего полного оборота несущего винта ЛА.
3. При пеленгации цели система фиксирует текущее время (момент времени пеленгации цели) tcur и вычисляет разницу:
T2=tcur-t1,
пропорциональную повороту лопастей несущего винта ЛА от фиксированного положения, соответствующего углу ε (положения, при котором датчиком вырабатывается импульс), до положения лопастей в момент времени пеленгации цели tcur на текущем обороте несущего винта ЛА (на Фиг. 3 показано текущее угловое положение 01 лопасти л1).
4. Система вычисляет угловые положения лопастей несущего винта ЛА относительно строительной оси ЛА в момент времени tcur пеленгации цели, используя разницу Т2 между текущим временем пеленгации цели и временем получения очередного импульса от датчика, а также период Т предыдущего полного оборота несущего винта ЛА. Вносимая угловым ускорением несущего винта ЛА ошибка при использовании на текущем обороте несущего винта ЛА времени предыдущего оборота пренебрежимо мала, т.к. угловое ускорение несущего винта ЛА незначительно вследствие большого момента инерции несущего винта, и системой не учитывается.
Для пятилопастного (N=5) несущего винта ЛА угловые положения для каждой лопасти система вычисляет следующим образом:
- угловое положение лопасти л1:
θ1=(ε+0*(2*π/N)+(2*π/Т)*Т2) mod (2*π);
- угловое положение лопасти л2:
θ2=(ε+1*(2*π/1М)+(2*π/Т)*Т2) mod (2*π);
- угловое положение лопасти л3:
θ3=(ε+2*(2*π/N)+(2*π/Т)*Т2) mod (2*π);
- угловое положение лопасти л4:
θ4=(ε+3*(2*π/N)+(2*π/T)*Т2) mod (2*π);
- угловое положение лопасти л5:
θ5=(ε+4*(2*π/N)+(2*π/Т)*Т2) mod (2*π);
При ином количестве лопастей несущего винта ЛА формулы для вычисления угловых положений каждой лопасти изменяются соответствующим образом.
Первое слагаемое подмодульного выражения каждой формулы отражает угловое положение первой лопасти в момент выработки импульса, второе слагаемое отражает угловое смещение соответствующей лопасти по отношению к первой лопасти, третье слагаемое отражает угловое смещение лопастей к моменту времени пеленгации цели относительно известного их углового положения в момент времени выработки очередного импульса. Вычисление выражения по модулю (2*π) выполняется с целью ограничения значения углового положения лопастей диапазоном от 0 до (2*π).
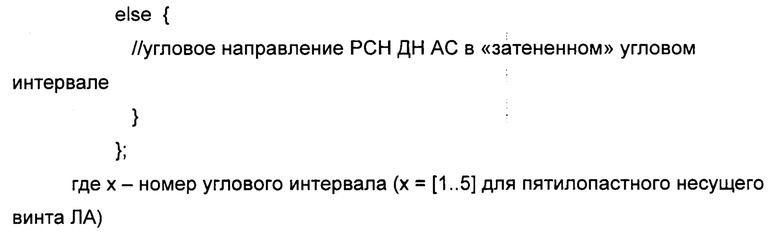
5. Система вычисляет границы βx1, βx2 (где х - номер углового интервала) «чистых» угловых интервалов (в пределах которых влияние «затенения» АС на ошибку пеленгации цели не превышает допустимых пределов) в момент времени tcur следующим образом:
- границы первого «чистого» углового интервала между лопастями л1 и л2:
β11=θ1+α/2;
β12=θ2-α/2;
- границы второго «чистого» углового интервала между лопастями л2 и л3:
β21=θ2+α/2;
β22=θ3-α/2;
- границы третьего «чистого» углового интервала между лопастями л3 и л4:
β31=θ3+α/2;
β32=θ4-α/2;
- границы четвертого «чистого» углового интервала между лопастями л4 и л5:
β41=θ4+α/2;
β42=θ5-α/2;
- границы пятого «чистого» углового интервала между лопастями л5 и л1:
β51=θ5+α/2;
β52=θ1-α/2;
В приведенных выражениях α/2 - заданное значение отклонения РСН ДН АС от направления лопасти несущего винта ЛА, при превышении которого лопасть не оказывает недопустимого влияния на ДН АС.
При ином количестве лопастей несущего винта ЛА формулы для вычисления границ угловых интервалов изменяются соответствующим образом.
6. В соответствии с алгоритмом, выполняемым для угловых интервалов между каждой парой лопастей, система определяет, находится ли текущее РСН ДН АС в одном из «чистых» угловых интервалов: 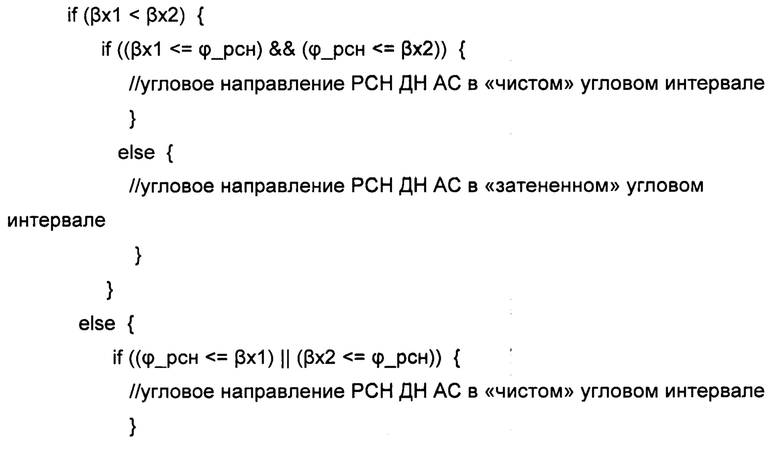
7. В соответствии с результатами анализа по п. 6 в текущий момент времени система проводит пеленгацию цели, если РСН ДН АС находится в одном из «чистых» угловых интервалов между лопастями вращающегося несущего винта ЛА (т.е. угловое положение РСН ДН АС отличается от углового положения каждой лопасти несущего винта ЛА на значение не менее заданного), в противном случае в текущий момент времени система пеленгацию цели не проводит.
Использование: изобретение относится к области радиолокации и может быть использовано в радиолокационных системах, имеющих в своем составе антенную систему (АС), диаграмма направленности (ДН) которой периодически искажается вследствие влияния на ДН АС лопастей вращающегося несущего винта винтокрылого летательного аппарата (ЛА). Сущность: система моноимпульсной радиолокации, установленная на винтокрылом летательном аппарате (ЛА), содержит антенную систему (АС), приемное устройство и цифровое вычислительное устройство (ЦВУ), содержащее запоминающее устройство команд (ЗУК). Суммарный и разностный выходы АС соединены с соответствующими входами приемного устройства, суммарный и разностный выходы которого соединены с соответствующими входами ЦВУ. В состав системы дополнительно введен датчик, выход которого соединен с дополнительным входом ЦВУ. Датчик вырабатывает импульс при определенном угловом положении лопастей несущего винта ЛА относительно строительной оси ЛА. В состав ЗУК введена последовательность команд, исполняемых ЦВУ при эксплуатации системы, указанная последовательность команд реализует определение взаимного углового положения равносигнального направления (РСН) диаграммы направленности (ДН) АС и углового положения лопастей несущего винта ЛА для момента времени пеленгации цели с использованием измеренных системой момента времени пеленгации цели, моментов времени получения очередного и предыдущего импульсов от датчика и значения углового положения лопастей несущего винта ЛА в момент выработки импульса. Последовательность команд реализует разрешение определения углового направления на цель, если угловое положение РСН ДН АС отличается от углового положения каждой лопасти несущего винта ЛА в момент времени определения углового направления на объект на значение не менее заданного. Технический результат: уменьшение до приемлемых значений ошибки пеленгации, связанной с периодическим искажением ДН АС, а также возможность применения системы для пеленгации цели с уменьшенной до приемлемых значений ошибкой пеленгации в диапазоне азимутальных направлений РСН ДН антенны от 0° до 360° и использования сигнала введенного в систему дополнительного датчика другими системами ЛА. 3 ил.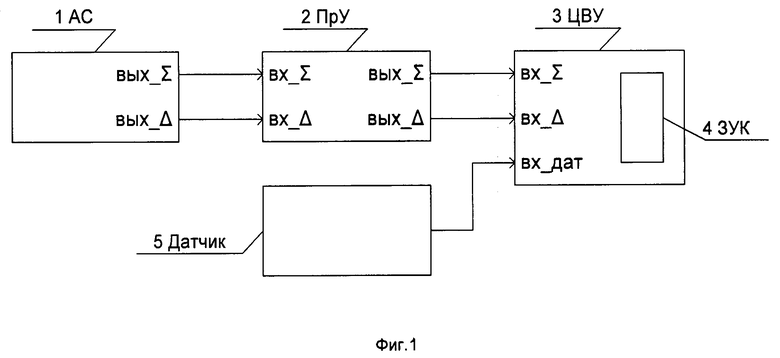
Система моноимпульсной радиолокации, установленная на винтокрылом летательном аппарате (ЛА), содержащая антенную систему (АС), приемное устройство и цифровое вычислительное устройство (ЦВУ), содержащее запоминающее устройство команд (ЗУК), при этом суммарный и разностный выходы АС соединены с соответствующими входами приемного устройства, суммарный и разностный выходы которого соединены с соответствующими входами ЦВУ, отличающаяся тем, что в состав системы дополнительно введен датчик, выход которого соединен с дополнительным входом ЦВУ, вырабатывающий импульс при определенном угловом положении лопастей несущего винта ЛА относительно строительной оси ЛА, а в состав ЗУК введена последовательность команд, исполняемых ЦВУ при эксплуатации системы, реализующих определение взаимного углового положения равносигнального направления (РСН) диаграммы направленности (ДН) АС и углового положения лопастей несущего винта ЛА для момента времени пеленгации цели с использованием измеренных системой момента времени пеленгации цели, моментов времени получения очередного и предыдущего импульсов от датчика и значения углового положения лопастей несущего винта ЛА в момент выработки импульса, и разрешающих определение углового направления на цель, если угловое положение РСН ДН АС отличается от углового положения каждой лопасти несущего винта ЛА в момент времени определения углового направления на объект на значение не менее заданного.
| Система моноимпульсной радиолокации с повышенной точностью определения угла пеленга цели и сохраненной взаимозаменяемостью антенны в составе системы | 2019 |
|
RU2755796C2 |
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| CN 107462890 A, 12.12.2017 | |||
| KR 20170024452 A, 07.03.2017. | |||
