Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах, имеющих в своем составе антенну, диаграмма направленности (ДН) которой периодически искажается вследствие взаимодействия с лопастями вращающегося несущего винта винтокрылого летательного аппарата (ЛА).
Из уровня техники известны различные способы уменьшения ошибок пеленгации цели (определения углового направления на цель) в системах радиолокации.
Известен способ определения координат цели в системе «запрос-ответ», защищенный патентом RU 2 631 117 С1. Способ учитывает то, что антенна системы моноимпульсной радиолокации выполнена в виде одномерной антенной решетки и ее ДН имеет вид круглой воронки. Повышение точности определения координат цели достигается тем, что способ использует математическое описание ДН антенны, отклонение в локальной системе координат антенны направления ответных сигналов от плоскости, перпендикулярной направлению раскрыва антенны и проходящей через центр раскрыва антенны, и дальность до цели. Указанные параметры используются для определения плоскости, в которой расположена цель (плоскости пеленга цели), перпендикулярной направлению раскрыва антенны. Вычисление координат цели производится с использованием математических выражений, определяющих плоскость, в которой расположена цель, сферу равной дальности до цели и плоскость высоты цели.
Известен также способ повышения точности определения угла пеленга цели при сохранении взаимозаменяемости антенны в составе системы, защищенный патентом RU 2 731 879 С1. Способ использует для определения угла пеленга цели вычисление значения описывающего ДН антенны степенного полинома с известными коэффициентами, аргументом которого является отношение уровней сигналов от цели на «суммарном» и «разностном» выходах антенны. Коэффициенты степенного полинома определяются после завершения операций изготовления и контроля антенны (т.е. учитывают особенности конкретного экземпляра антенны), и сохраняются в постоянном запоминающем устройстве антенны. Данный способ принят в качестве прототипа заявляемого способа.
Указанным способам присущ недостаток, заключающийся в том, что при
осуществлении способов на винтокрылом ЛА невозможно избежать искажения ДН антенны радиолокационной системы вследствие взаимодействия электромагнитного поля антенны с конструктивными частями ЛА (например, с лопастями несущего винта винтокрылого ЛА). Соответственно, при взаимодействии электромагнитного поля антенны с лопастями несущего винта ЛА для первого известного из уровня техники способа ДН антенны будет отличаться от круглой воронки, а для второго известного из уровня техники способа искаженная ДН антенны будет описываться другими значениями коэффициентов степенного полинома.
При применении указанных способов в радиолокационных системах, установленных на винтокрылых ЛА, возникает техническая проблема, делающая невозможным выполнение требований к системам в части допустимой величины ошибки пеленгации цели. Техническая проблема заключается в том, что ДН антенны системы периодически искажается вследствие нарушения однородности электромагнитного поля антенны, при этом пеленгация цели производится с дополнительными ошибками, возникающими вследствие искажения ДН антенны. Однородность электромагнитного поля периодически нарушается из-за наличия лопасти несущего винта в секторе раскрыва антенны. Можно показать, что для пятилопастного несущего винта ЛА лишь для диапазона примерно от 20 до 30% от полного углового сектора между лопастями искажение ДН антенны («затенение» антенны лопастями несущего винта ЛА) является приемлемым для правильного функционирования радиолокационной системы в части пеленгации цели. Лишь в этом диапазоне угловых направлений равносигнального направления (РСН) ДН антенны ошибка пеленгации объекта радиолокационной системой будет приемлемой.
Заявителю известен также «Способ уменьшения ошибок определения углового направления на цель», заявка №2022109982 на выдачу патента на который была подана, а затем отозвана заявителем настоящего изобретения.
Технический результат, достигаемый изобретением, заключается в уменьшении до приемлемых значений ошибок пеленгации цели радиолокационной системой, связанных с периодическим искажением ДН антенны системы вследствие периодического влияния лопасти несущего винта винтокрылого ЛА на электромагнитное поле антенны.
Неожиданный технический результат, достигаемый изобретением, заключается в возможности пеленгации цели с уменьшенной до приемлемых значений ошибкой пеленгации в полном круговом диапазоне азимутальных
направлений РСН ДН антенны от 0° до 360°.
Технический результат достигается тем, что используют результаты измерения моментов времени возникновения импульса, вырабатываемого датчиком в определенном, заранее известном, угловом положении лопастей несущего винта ЛА относительно строительной оси ЛА, по результатам измерения моментов времени возникновения очередного и предыдущего импульса и значениям угловых положений лопастей несущего винта ЛА в момент выработки импульса определяют взаимное угловое положение равносигнального направления (РСН) диаграммы направленности (ДН) антенны радиолокационной системы и лопастей несущего винта ЛА для момента времени определения углового направления на цель, и разрешают определение углового направления на цель с помощью радиолокационной системы, если абсолютное значение разницы между угловым положением РСН ДН антенны и угловым положением ближайшей к РСН ДН антенны лопасти несущего винта ЛА в момент времени определения углового направления на цель больше определенной, заранее заданной, величины.
Угловое положение лопастей несущего винта ЛА относительно строительной оси ЛА в момент выработки импульса датчиком определяют на стадии разработки путем размещения датчика таким образом, чтобы обеспечивалась выработка импульса в известном, заданном разработчиком, угловом положении лопастей несущего винта ЛА. Другим вариантом определения углового положения лопастей несущего винта ЛА относительно строительной оси ЛА в момент выработки импульса датчиком может быть результат непосредственного натурного измерения углового положения лопастей несущего винта ЛА в момент выработки импульса при испытаниях опытного или иного образца ЛА.
Величину абсолютного значения разницы между угловым положением РСН ДН антенны и угловым положением ближайшей к РСН ДН антенны лопасти несущего винта определяют на стадии разработки и/или испытаний опытного или иного образца винтокрылого ЛА как половину углового интервала положений РСН ДН антенны относительно лопасти несущего винта ЛА, в котором указанная лопасть оказывает недопустимое влияние на ДН антенны («затененного» углового интервала).
При пеленгации цели вычисляют интервал времени Т1 между появлениями очередного (t_04epefl) и предыдущего (t_npefl) импульсов датчика и интервал времени Т2 между моментом (1:_тек) пеленгации цели и появлением очередного импульса датчика. По значению интервала времени Т1 между появлениями
очередного и предыдущего импульсов определяют угловую скорость вращения лопастей несущего винта ЛА. По значению интервала времени Т2 между моментом пеленгации цели и появлением очередного импульса датчика, с использованием вычисленной угловой скорости вращения лопастей несущего винта ЛА, определяют угловое смещение лопастей несущего винта ЛА относительно строительной оси ЛА от их положения в момент выработки очередного импульса датчика. Определенное таким образом угловое смещение лопастей несущего винта ЛА относительно строительной оси ЛА определяет расположение «затененных» угловых интервалов в момент пеленгации цели.
Сравнивая границы «затененных» угловых интервалов в момент пеленгации цели с направлением РСН ДН антенны в момент пеленгации цели определяют, попадает ли направление РСН ДН антенны в момент пеленгации цели в один из «затененных» угловых интервалов, и разрешают пеленгацию цели, если направление РСН ДН антенны в момент пеленгации цели не попадает ни в один из «затененных» угловых интервалов. Если направление РСН ДН антенны в момент пеленгации цели попадает в один из «затененных» угловых интервалов, сигналы от цели могут быть использованы для получения других характеристик цели.
Таким образом, заявляемый способ обеспечивает пеленгацию цели радиолокационной системой исключительно в периоды времени, в которых РСН ДН антенны не попадает ни в один «затененный» угловой интервал (т.е. угловое положение РСН ДН антенны отличается от текущего углового положения ближайшей к антенне лопасти несущего винта на значение не менее заданного), и ошибка пеленгации, вызываемая искажением ДН антенны лопастями несущего винта ЛА, оказывается приемлемой для целей пеленгования.
Сущность изобретения и его осуществление поясняется рисунками Фиг.1 и
Фиг.2.
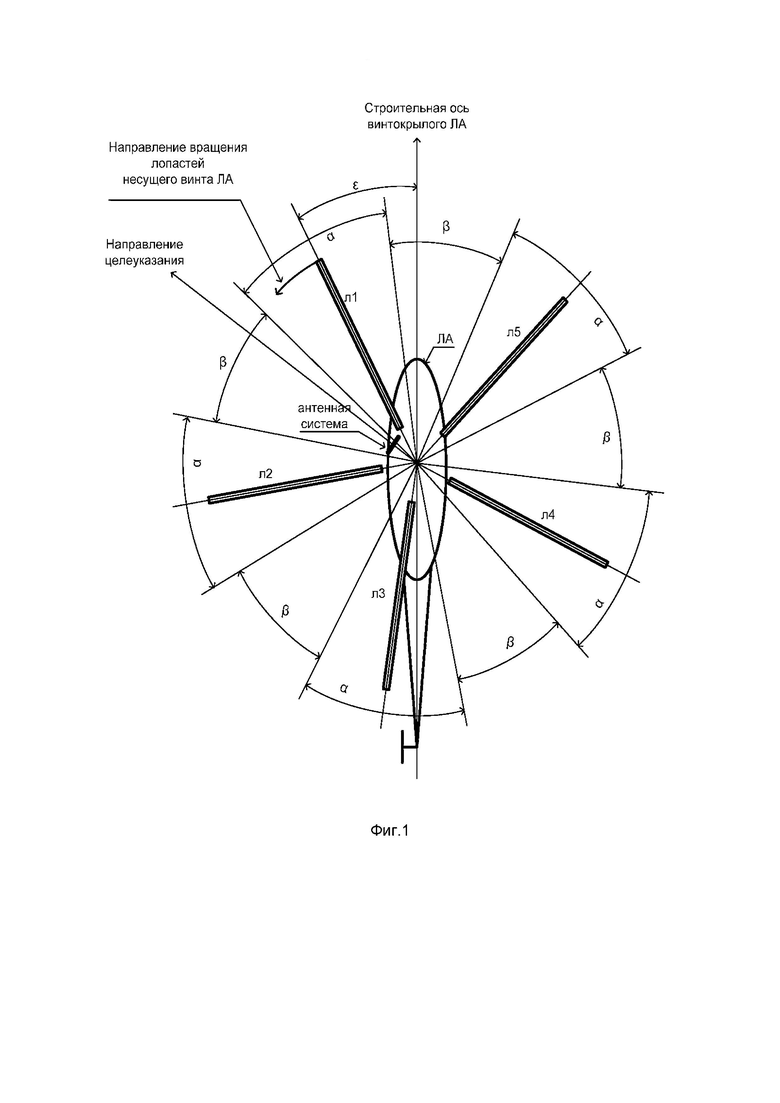
На Фиг.1, поясняющей условные обозначения лопастей несущего винта ЛА и их взаимное расположение в момент выработки импульса, представлены:
- винтокрылый летательный аппарат ЛА;
- антенна системы моноимпульсной радиолокации, ДН которой или сама антенна развернуты в направлении целеуказания;
- угол е положения лопасти л1 несущего винта ЛА в момент выработки импульса и направление вращения лопастей;
- «затененные» угловые интервалы а, в пределах которых влияние
«затенения» антенны лопастями несущего винта ЛА на ошибку пеленгования цели превышает допустимые пределы;
- «чистые» угловые интервалы р, в пределах которых влияние «затенения» антенны на ошибку пеленгования цели не превышает допустимых пределов;
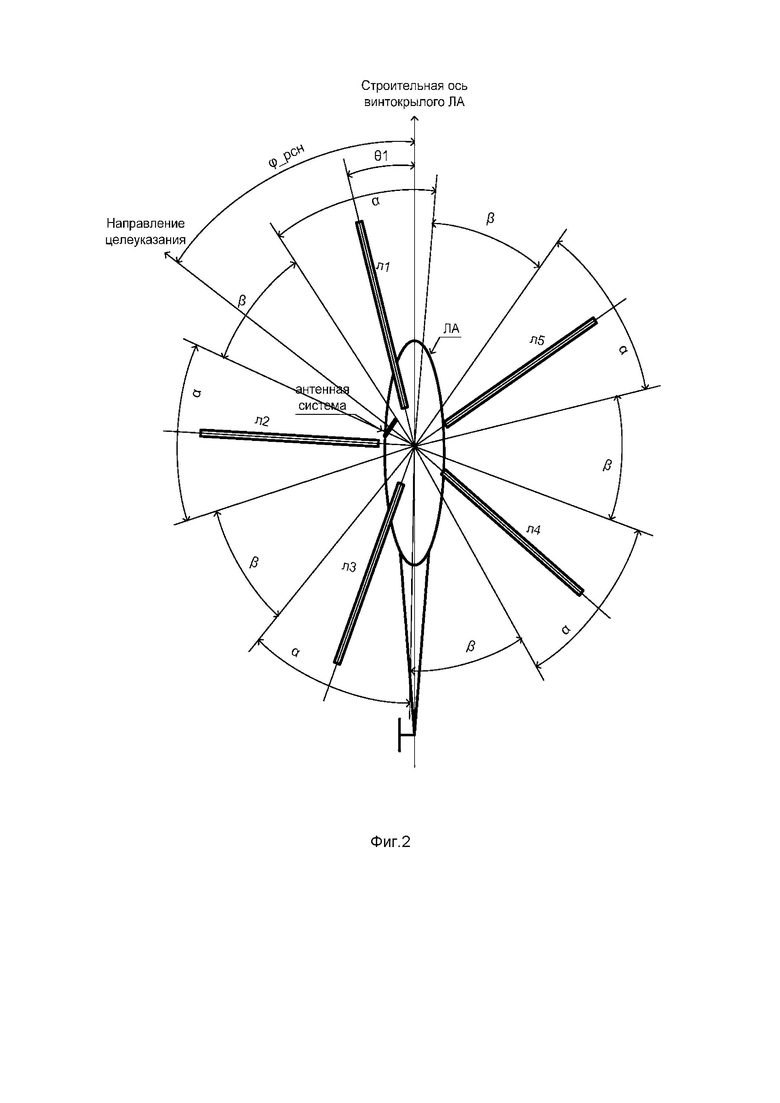
На Фиг.2, поясняющей положение лопастей несущего винта ЛА в текущий момент времени (момент времени пеленгации цели), представлены:
- винтокрылый летательный аппарат ЛА;
- антенна радиолокационной системы, ДН которой или сама антенна развернуты в направлении целеуказания;
- «затененные» угловые интервалы а, в пределах которых влияние «затенения» антенны лопастями несущего винта ЛА на ошибку пеленгации цели превышает допустимые пределы;
- «чистые» угловые интервалы р, в пределах которых влияние «затенения» антенны на ошибку пеленгации цели не превышает допустимых пределов;
- текущее угловое положение 61 лопасти л1 несущего винта ЛА относительно строительной оси Л А;
- угловое направление ср_рсн РСН ДН антенны относительно строительной оси ЛА.
Способ осуществляется выполнением действий в следующей поел е до вател ьно сти:
1 Фиксируют моменты времени t_npefl появления предыдущего и t_04epefl появления очередного импульсов, соответствующих углу £ положения лопасти л1 несущего винта ЛА относительно строительной оси ЛА;
1 Вычисляют разницу:
Т1 = t_04epefl - t_npefl, соответствующую периоду предыдущего полного оборота несущего винта ЛА.
1 Фиксируют текущий момент времени t_jeK (момент времени пеленгации цели) и вычисляют разницу:
Т2 = t_TeK - t_04epefl, пропорциональную повороту лопастей несущего винта ЛА на текущем обороте
от фиксированного положения (соответствующего углу £ для лопасти л1) в момент выработки импульса датчиком до положения лопастей в текущий момент времени t_TeK (на Фиг.2 показано текущее угловое положение 91 лопасти л1).
4 Вычисляют угловые положения лопастей несущего винта ЛА относительно строительной оси ЛА в текущий момент времени t_TeK пеленгации цели, используя разницу Т2 между текущим моментом времени пеленгации цели радиолокационной системой и моментом времени получения очередного импульса, а также период Т1 предыдущего полного оборота несущего винта ЛА. Вносимая угловым ускорением несущего винта ЛА ошибка при использовании для времени текущего полного оборота несущего винта ЛА времени предыдущего оборота пренебрежимо мала, т.к. угловое ускорение несущего винта ЛА незначительно вследствие большого момента инерции несущего винта, и способом не учитывается.
Для пятилопастного (N=5) несущего винта ЛА угловые положения каждой лопасти в момент пеленгации цели вычисляются следующим образом:
- угловое положение лопасти л1:
1 = (£ + 0*(2*тг/1\1) + (2*тг/Т1)*Т2) mod (2*тг);
- угловое положение лопасти л2:
1 = (£ + 1*(2*tt/N) + (2*тг/Т1)*Т2) mod (2*тг);
- угловое положение лопасти лЗ:
1 = (£ + 2*(2*tt/N) + (2*тг/Т1)*Т2) mod (2*тг);
- угловое положение лопасти л4:
1 = (£ + 3*(2*tt/N) + (2*тг/Т1)*Т2) mod (2*тг);
- угловое положение лопасти л5:
1 = (£ + 4*(2*tt/N) + (2*п7Т1)*Т2) mod (2*тг);
При ином количестве лопастей несущего винта ЛА формулы для вычисления угловых положений каждой лопасти изменяются соответствующим образом.
Первое и второе слагаемые подмодульных выражений отражают соответственно угловое положение первой лопасти относительно строительной оси ЛА в момент выработки импульса и угловое смещение соответствующей лопасти по отношению к первой лопасти, третье слагаемое отражает угловое смещение лопастей к текущему моменту времени относительно известного их углового положения в момент времени выработки импульса. Вычисление выражения по модулю (2*тг) выполняется с целью ограничения значения углового положения диапазоном от 0 до (2*тг).
1 Вычисляют угловые значения (3x1, (3x2 (х - номер углового интервала) границ «чистых» угловых интервалов (в пределах которых влияние «затенения» антенны на ошибку пеленгования цели не превышает допустимых пределов) относительно строительной оси ЛА в момент времени tjreK пеленгации цели следующим образом:
- границы первого «чистого» углового интервала между лопастями л1 и л2:
(311 = 91 + а/2; (312 = 62 - а/2;
- границы второго «чистого» углового прервала между лопастями л2 и пз:
(321 = 92+ а/2; (322 = 63 - а/2;
- границы третьего «чистого» углового интервала между лопастями лЗ и л4:
(331 = 93+ а/2; (332 = 64 - а/2;
- границы четвертого «чистого» углового интервала между лопастями л4 и л5:
(341 = 94+ а/2; (342 = 65 - а/2;
- границы пятого «чистого» углового интервала между лопастями л5 и л1:
(351 = 65+ а/2; (352 = 61 - а/2;
В приведенных выражениях а/2 - заданное значение отклонения РСН ДН антенны от направления лопасти несущего винта ЛА, при превышении которого лопасть не оказывает недопустимого влияния на ДН антенны.
При ином количестве лопастей несущего винта ЛА формулы для вычисления границ угловых интервалов изменяются соответствующим образом.
1 В соответствии с алгоритмом, повторяемым для угловых интервалов между
каждой парой лопастей, анализируют, располагается ли РСН ДН антенны в момент
времени пеленгации цели в одном из «чистых» угловых интервалов:
if ((3x1 < (3x2) {
if (((3x1 <= ср_рсн) && (ф_рсн <= (3x2)) { //угловое направление РСН ДН АС в «чистом» угловом интервале }
else {
//угловое направление РСН ДН АС в «затененном» угловом интервале }
}
else {
if ((ф_рсн <= (3x1) || ((3x2 <= ф_рсн)) { //угловое направление РСН ДН АС в «чистом» угловом интервале
}
else {
//угловое направление РСН ДН АС в «затененном» угловом интервале }
};
где х - номер углового интервала (х = [1 ..5] для пятилопастного несущего винта ЛА)
7 В соответствии с результатами анализа по п.6 проводят пеленгование цели радиолокационной системой, если РСН ДН антенны находится в одном из «чистых» угловых интервалов между лопастями вращающегося несущего винта ЛА, в противном случае пеленгование цели не проводят.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИИ С УМЕНЬШЕННОЙ ОШИБКОЙ ПЕЛЕНГАЦИИ | 2023 |
|
RU2803141C1 |
| Система моноимпульсной радиолокации с уменьшенной ошибкой пеленгации | 2023 |
|
RU2828197C1 |
| Способ определения координат целей с помощью аппроксимированной пеленгационной характеристики | 2021 |
|
RU2777849C1 |
| Пеленгатор источника радиоизлучения с широкоугольным коническим сканированием | 2016 |
|
RU2616597C1 |
| МОНОИМПУЛЬСНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2004 |
|
RU2273863C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах, имеющих в своем составе антенну, диаграмма направленности (ДН) которой периодически искажается вследствие взаимодействия с лопастями вращающегося несущего винта винтокрылого летательного аппарата (ЛА). Технический результат заключается в уменьшении ошибок пеленгации цели радиолокационной системой, связанных с периодическим искажением ДН антенны системы вследствие периодического влияния лопасти несущего винта винтокрылого ЛА на электромагнитное поле антенны. В заявленном способе определяют угловой интервал положений равносигнального направления (РСН) ДН антенны относительно лопасти несущего винта ЛА, в котором лопасть оказывает недопустимое влияние на ДН антенны («затененный» угловой интервал). Величину указанного углового интервала используют для определения допустимости пеленгации в момент пеленгации цели. В момент пеленгации цели определяют текущее угловое положение лопастей несущего винта ЛА относительно строительной оси ЛА и текущее положение границ «затененных» угловых интервалов относительно строительной оси ЛА, связанных с текущими угловыми положениями лопастей. С учетом текущего положения РСН ДН антенны относительно строительной оси ЛА определяют, попадает ли текущее направление РСН ДН антенны в один из «затененных» угловых интервалов, в котором соответствующая лопасть недопустимо искажает ДН антенны, и по результатам определения разрешают или не разрешают проведение пеленгации цели. 2 ил.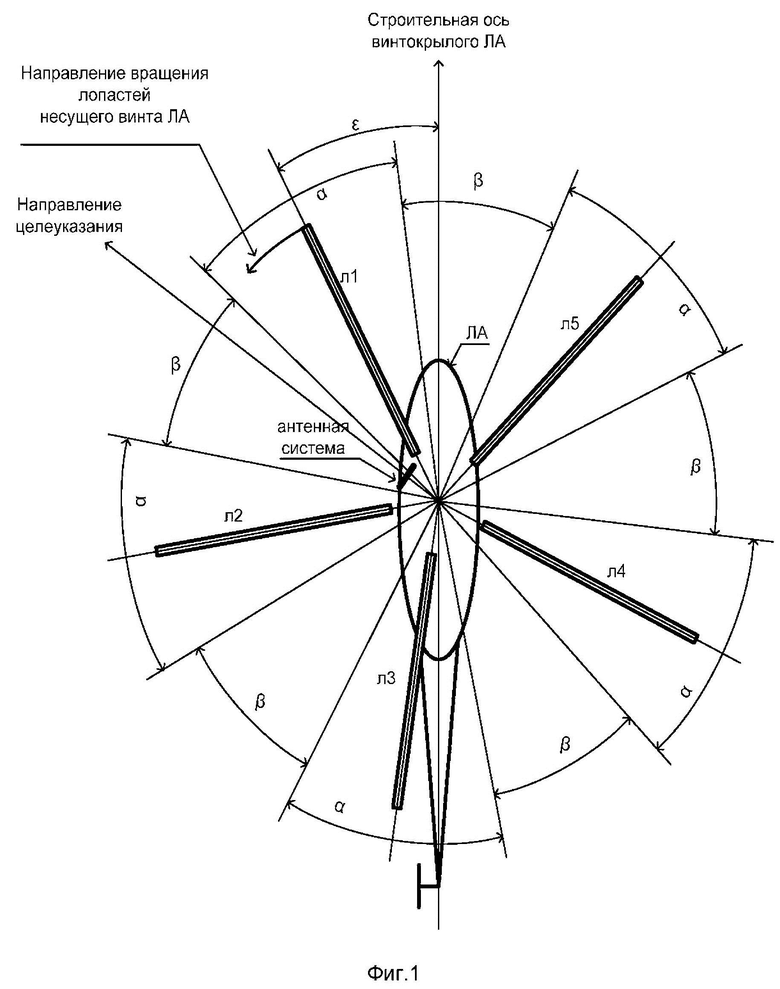
Способ пеленгации цели радиолокационной системой, устанавливаемой на винтокрылый летательный аппарат (ЛА), заключающийся в уменьшении ошибок определения углового направления на цель, возникающих вследствие периодического искажения электромагнитного поля антенны радиолокационной системы в результате его взаимодействия с находящейся вблизи антенны лопастью вращающегося несущего винта ЛА, отличающийся тем, что используют результаты измерения моментов времени возникновения импульса, вырабатываемого датчиком в определенном, заранее известном, угловом положении лопастей несущего винта ЛА относительно строительной оси ЛА, по результатам измерения моментов времени возникновения очередного и предыдущего импульса и значениям угловых положений лопастей несущего винта ЛА в момент выработки импульса определяют взаимное угловое положение равносигнального направления (РСН) диаграммы направленности (ДН) антенны радиолокационной системы и лопастей несущего винта ЛА для момента времени определения углового направления на цель и разрешают определение углового направления на цель с помощью радиолокационной системы, если абсолютное значение разницы между угловым положением РСН ДН антенны и угловым положением ближайшей к РСН ДН антенны лопасти несущего винта ЛА в момент времени определения углового направления на цель больше определенной, заранее заданной, величины.
| Способ повышения точности определения угла пеленга цели при сохранении взаимозаменяемости антенны в составе системы | 2019 |
|
RU2731879C1 |
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2010 |
|
RU2449311C1 |
| ЩЕРБАКОВ А.В., ЩЕРБАКОВ В.С | |||
| Влияние на точность радиопеленгации мешающих факторов и методы их компенсации // Журнал радиоэлектроники [электронный журнал] | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| JP 2019505806 | |||

