Изобретение относится к активной радиолокации и может быть использовано в запросчиках радиолокационных систем активного запроса-ответа, устанавливаемых на подвижные объекты-носители, работающих по целеуказаниям от систем носителя по объектам, оборудованным радиолокационными ответчиками.
Из уровня техники известен радиолокационный способ определения азимута цели с помощью интерполированной пеленгационной характеристики (патент RU №2631118, МПК: G01S 13/44, опубликован 19.09.2017), состоящий в обработке запомненной полной азимутальной последовательности сигналов с выхода моноимпульсной антенной системы, при котором из обработки исключают сигналы, лежащие ниже уровня достоверности результатов, определяемого величиной шума приемного тракта, после чего через точки, лежащие справа и слева от приблизительного направления на цель, образованные совокупностью угловых положений моноимпульсной антенной системы и соответствующими им величинами сигналов с выхода суммарно-разностного дискриминатора проводятся интерполированные кривые третьего порядка, включающие эти точки, а азимут, соответствующий точке пересечения этих кривых, является вычисленным азимутом цели. Данный способ позволяет повысить точность пеленгации цели при воздействии факторов, искажающих пеленгационную характеристику.
Из уровня техники известен также способ определения азимута цели с помощью линейно-аппроксимированной пеленгационной характеристики (заявка №2020132682), включающий формирование полной азимутальной последовательности сигналов от цели путем излучения пачки запросов с одновременным сканированием антенной системы по азимуту и сохранения для каждого запроса значений отношения амплитуд ответного сигнала с суммарного и разностного каналов, интерполяцию отсутствующих данных (восстановление данных в отсутствующих ответах), сглаживание полученной пеленгационной характеристики (далее по тексту - ПХ) цели усреднением в скользящем окне, поиск точки максимума (точки перегиба) ПХ цели, вычисление двух интерполяционных прямых слева и справа от точки перегиба, вычисление точки пересечения интерполяционных прямых, принимаемой в качестве азимутальной координаты цели, и проверку достоверности измерения азимута цели. Способ позволяет снизить влияние погрешности измерения амплитуды сигналов, влияние чувствительности приемных каналов, влияние пропусков (отсутствия) сигналов в отдельных точках сканирования за счет выделения общих закономерностей в уровнях принимаемых сигналов и построения на их основе полиномов, соответствующих данным закономерностям. Данный способ принят в качестве прототипа для заявляемого технического решения, и заявляемый способ является зависимым по отношению к прототипу.
При применении указанных способов определения азимута цели возникает техническая проблема, заключающаяся в том, что за время пошагового сканирования и формирования полной азимутальной последовательности сигналов антенная система (далее по тексту - АС) и фиксированная относительно АС локальная система координат (далее по тексту - ЛСК) АС (в которой формируется полная азимутальная последовательность сигналов) вследствие эволюций носителя и/или поворота антенны на носителе может существенно изменить свое положение относительно цели (положение которой в подвижной нормальной системе координат - ПНСК принимается неизменным). Вычисленная описанным в прототипе способом после завершения сканирования азимутальная координата цели оказывается привязанной к положению ЛСК в момент сканирования, соответствующий прохождению равносигнальным направлением (далее по тексту - РСН) АС точки пересечения интерполяционных прямых, а не к положению ЛСК в момент завершения сканирования и последующих вычислений с целью определения азимутальной координаты цели. Разница между указанными положениями ЛСК вносит погрешность определения направления на цель, которая не может быть скомпенсирована, т.к. после завершения сканирования положение ЛСК в момент прохождения РСН точки пересечения интерполяционных прямых неизвестно, и восстановить его невозможно. Можно показать, что при определенных исходных положениях носителя моноимпульсной АС и при определенных угловых скоростях изменения положения носителя указанная погрешность может достигать недопустимых значений (например, значение погрешности может достигать десятка угловых градусов при величинах допускаемой погрешности менее одного углового градуса).
Другая техническая проблема, возникающая при применении способа, заключается в том, что на ПХ могут быть ложные локальные максимумы, возникающие из-за наличия боковых лепестков диаграммы направленности АС, в которых уровни сигналов на выходе «суммарного» канала моноимпульсной АС больше уровней сигналов на выходе «разностного» канала АС. Обработка сигналов на ложном максимуме ПХ приведет к ошибке в определении углового направления на цель.
Из уровня техники известен также способ и система для определения координат цели в системе «запрос-ответ» (патент RU №266360 С1, МПК: G01S 13/75, опубликован 07.09.2018), в соответствии с которым после получения ответных сигналов от цели система «запрос-ответ», содержащая антенну моноимпульсной системы радиолокации, вычисляет с использованием ПХ антенны значение азимутального направления на цель в ЛСК антенны, по вычисленному значению азимутального направления и текущему положению ЛСК антенны в нормальной системе координат (далее по тексту - НСК) определяет плоскость азимутального пеленга цели в НСК и вычисляет координаты цели в НСК с использованием сообщаемой целью высоты цели, и измеренной системой «запрос-ответ» дальности до цели.
Применением указанного способа техническая проблема, связанная с изменением положения ЛСК в течение времени сканирования, решается, но возникает другая техническая проблема, заключающаяся в том, что погрешность результата вычисления азимутального направления на цель в ЛСК в значительной степени определяется исправностью всех каналов антенны моноимпульсной системы радиолокации, и при неисправности любого канала антенны погрешность превышает допустимые значения. Другая техническая проблема при применении способа заключается в том, что при одновременной пеленгации совокупности целей необходимо для каждого цикла «запрос-ответ» производить значительный объем математических вычислений для определения азимутального пеленга каждой цели.
Основной задачей, на решение которой направлено заявляемое техническое решение, является задача уменьшения погрешности в определении углового направления на цель, связанной с изменением положения ЛСК АС от положения, соответствующего вычисленной азимутальной координате цели, до положения, соответствующего завершению сканирования и формированию полной азимутальной последовательности сигналов от цели.
Техническим результатом, достигаемым при осуществлении заявляемого технического решения, является повышение точности определения углового направления на цель за счет минимизации ошибки, связанной с изменением положения ЛСК АС от положения, соответствующего вычисленной азимутальной координате цели, до положения, соответствующего завершению сканирования и формированию полной азимутальной последовательности сигналов от цели.
Техническим результатом, достигаемым при осуществлении заявляемого технического решения, является также возможность исключения ошибок в определении углового направления на цель, связанных с наличием ложных максимумов ПХ на боковых лепестках диаграммы направленности (далее по тексту - ДН) АС.
Неожиданным техническим результатом, достигаемым при осуществлении заявляемого технического решения, является уменьшение объема математических вычислений для каждого цикла «запрос-ответ», выполняемых системой моноимпульсной радиолокации при одновременной пеленгации нескольких целей.
Еще одним неожиданным техническим результатом, достигаемым при осуществлении заявляемого технического решения, является уменьшение объема данных полной азимутальной последовательности, приходящегося на одну цель, при увеличении количества целей.
Указанные технические результаты достигаются тем, что определение координат целей производится в порядке, включающем в себя следующие этапы:
1 Производится получение целеуказания от внешних систем носителя в виде направления и дальности целеуказания, по которым в ПНСК по ГОСТ 20058-80, ось OXg которой направлена на север, рассчитывается высота целеуказания Yg;
2 Производится пошаговое сканирование пространства по азимутальной координате (углу рыскания) ЛСК АС с помощью системы «запрос-ответ», включающей в себя моноимпульсную АС. При этом на очередном шаге сканирования текущее РСН АС изменяется на дискрет сканирования по углу рыскания ЛСК АС, производится запрос и фиксация ответов от целей. ПХ целей (отношения амплитуд ответных сигналов целей в «суммарном» и «разностном» каналах АС) и текущий угол рыскания РСН АС в ЛСК фиксируются (запоминаются) в массиве полной последовательности сигналов от целей. Кроме этого, в отличие от прототипа, в массиве полной последовательности сигналов от целей также фиксируется (запоминается) информация об угловом положении ЛСК АС в ПНСК для текущего шага сканирования, а также уровни сигналов целей в «суммарном» канале АС и измеренные дальности до целей;
3 После завершения сканирования производится обработка массива полной последовательности сигналов для каждой цели, включающая в себя сопоставление ответов с целями в зависимости от дальности ответов, восстановление методом линейной интерполяции данных ПХ каждой цели в точках, в которых ответы отсутствуют, и сглаживание полученной ПХ для каждой цели методом простого скользящего среднего в окне размером 3 значения;
4 Для каждой цели производится поиск точки перегиба ПХ цели (поиск максимального значения отношения амплитуд ответных сигналов цели в суммарном и разностном каналах АС), при этом, в отличие от прототипа, при наличии нескольких локальных максимумов отношения амплитуд ответных сигналов, точка перегиба ПХ должна располагаться на интервале по углу рыскания ЛСК АС, включающем шаг сканирования с максимальным (по массиву полной последовательности сигналов) уровнем сигнала на «суммарном» выходе АС, и имеющем ширину, близкую к ширине ДН АС по точкам пересечения «суммарной» и увеличенной на 3 дБ «разностной» ДН АС;
5 Для каждой цели на интервалах по углу рыскания ЛСК АС слева и справа от точки перегиба ПХ цели производится определение (вычисление наклона и смещения) двух прямых, аппроксимирующих левый и правый склоны ПХ в окрестностях точки перегиба. Ширина каждого интервала принимается близкой к половине ширины ДН АС по точкам пересечения «суммарной» и увеличенной на 3 дБ «разностной» ДН моноимпульсной АС.
6 Для каждой цели производится вычисление угла рыскания точки пересечения аппроксимирующих прямых в ЛСК АС;
7 В отличие от прототипа, для каждой цели из массива полной последовательности сигналов от цели отбираются два элемента массива, углы рыскания РСН АС для которых являются ближайшими к вычисленному углу рыскания точки пересечения аппроксимирующих прямых (лежащими на графике ПХ цели слева и справа от точки пересечения), и определяется пропорция, в которой точка пересечения аппроксимирующих прямых делит интервал между указанными значениями углов рыскания РСН в ЛСК АС;
8 В отличие от прототипа, с использованием пропорции, определенной ранее для точки пересечения аппроксимирующих прямых в ЛСК, методом линейной интерполяции на интервалах между угловыми положениями ЛСК в ПНСК, зафиксированными в отобранных элементах массива, определяется положение ЛСК в ПНСК по каждому углу, соответствующее точке пересечения аппроксимирующих прямых;
9 В отличие от прототипа, для каждой цели определяется направление на цель в ПНСК по значению угла рыскания точки пересечения аппроксимирующих прямых в ЛСК, положению ЛСК в ПНСК, соответствующему точке пересечения аппроксимирующих прямых, по значению дальности до цели и по значению полученной от цели высоты цели (или по значению высоты целеуказания);
10 Производится проверка достоверности (допустимости значения) направления на цель в ПНСК по критерию расположения цели выше уровня земной поверхности и отбор значения по минимальному отклонению от направления целеуказания.
Приведенная реализация способа обеспечивает определение направления на цель для положения ЛСК в ПНСК, которое было в момент сканирования пространства, соответствующий совпадению направления РСН АС с направлением на цель, т.к. вычисление положения ЛСК производится на основе интерполяции измеренных угловых положений ЛСК в ПНСК, наиболее близких к направлению на цель.
Приведенная реализация способа обеспечивает защиту определяемого направления на цель от ошибок, связанных с наличием ложных максимумов ПХ на боковых лепестках ДН АС, т.к. перед определением аппроксимирующих прямых производится проверка принадлежности истинного максимума ДН АС интервалу, на котором определяются аппроксимирующие прямые.
Приведенная реализация способа также обеспечивает по сравнению с известными техническими решениями уменьшение объема математических вычислений, т.к. наибольшая часть расчетов выполняется для ЛСК АС без пересчета координат в ПНСК, и лишь на конечном этапе производится пересчет углового направления на цель из ЛСК АС в ПНСК.
Приведенная реализация способа обеспечивает минимальный объем дополнительных сохраняемых данных, т.к. данные о положении ЛСК АС в ПНСК и о положении РСН АС в ЛСК АС одинаковы для всех целей, и их объем не возрастает при увеличении количества целей.
Полагая, что начала систем координат ЛСК, ССК и ПНСК совпадают в точке О, и что ЛСК жестко привязана к положению АС (например - ось OZлск совпадает с направлением раскрыва элементов решетки АС), способ определения координат цели с помощью аппроксимированной пеленгационной характеристики осуществляется следующим образом:
1 Система «запрос-ответ» моноимпульсной радиолокации (далее по тексту - система) получает от бортового оборудования носителя целеуказание в виде предполагаемых координат [XgYgZg] в ПНСК оборудованного радиолокационным ответчиком отвечающего объекта, при этом координата Yg является высотой отвечающего объекта относительно носителя;
2 Система, с использованием информации о текущем положении носителя в ПНСК и о текущем положении антенны системы на носителе, определяет диапазон сканирования пространства по углу рыскания ЛСК так, чтобы направление на отвечающий объект располагалось по возможности ближе к середине диапазона сканирования пространства с помощью антенны системы;
3 Система производит пошаговое сканирование пространства в пределах определенного диапазона, при этом на каждом шаге сканирования системой излучается запросный сигнал, принимаются сигналы от ответивших целей на «суммарном» и «разностном» выходах антенны, и измеряются уровни этих сигналов. Сканирование осуществляется последовательным изменением положения РСН антенны по углу рыскания в ЛСК с шагом, определяемым аппаратурой системы. После завершения каждого шага сканирования в очередном элементе массива данных сканирования система сохраняет следующую информацию:
- характеристику текущего пространственного положения ЛСК в ПНСК (например, в виде значений в ПНСК углов рыскания, тангажа и крена носителя и связанной системы координат носителя - ССК по ГОСТ 20058-80, и значений в ССК носителя углов рыскания тангажа и крена ЛСК АС;
- текущий угол рыскания РСН АС в ЛСК;
- измеренные уровни сигнала ответа на «суммарном» выходе АС и отношения измеренных уровней сигналов ответа на «суммарном» и «разностном» выходах АС для каждой ответившей цели;
- измеренные дальности до ответивших целей, определяемые системой по значению временного интервала от запроса до ответа цели.
Структура элемента массива сохраняемых данных сканирования может иметь вид:

4 После завершения сканирования система производит привязку ответов к целям, при этом критерием принадлежности ответа конкретной цели Τ с номером n (Τn) является измеренная дальность D, с которой получен ответ от цели. В результате привязки с каждой ответившей целью ассоциируется массив данных об ответах этой цели для всех положений РСН АС по углу рыскания ЛСК (для всего диапазона сканирования пространства), включающий в том числе положения РСН АС (и соответствующие им элементы массива), для которых ответы от цели отсутствовали. Массив данных об ответах цели содержит для каждого положения РСН АС в пределах диапазона сканирования отношение уровней сигналов ответа цели (при его наличии), либо значение, показывающее, что ответ от цели отсутствовал (например, нулевое значение).
5 Для каждой цели Τn система производит восстановление значений отношения уровней сигналов ответа в элементах массива, для которых ответы от цели отсутствовали. Восстановление производится методом линейной интерполяции по значениям отношений уровней сигналов для имеющихся ответов. Значения отношений уровней сигналов для крайних точек диапазона сканирования принимаются равными ближайшим имеющимся значениям.
6 Для каждой цели Τn система производит сглаживание полученной совокупности значений отношения уровней сигналов методом простого скользящего среднего в окне размером 3 значения, при этом значения отношения уровней сигналов в первом и последнем элементах массива остаются неизменными.
7 Для каждой цели Τn по всему массиву данных об ответах система производит поиск элемента массива с максимальным значением «суммарного» сигнала цели на выходе АС, и, в диапазоне положений РСН АС по углу рыскания в пределах ширины ДН АС от найденного элемента, поиск элемента массива с максимальным значением отношения уровней сигналов этой цели. Положение РСН АС по углу рыскания в ЛСК АС, сохраненное в найденном элементе массива с максимальным значением отношения уровней сигналов, принимается в качестве точки перегиба ПХ для цели. Точка перегиба делит интервал сглаженных значений отношения уровней сигналов на две части (слева и справа от нее). Определение точки перегиба ПХ цели в пределах ширины ДН АС от угла рыскания, соответствующего максимальному значению уровня «суммарного» сигнала, позволяет отсечь локальные ложные максимумы, вызванные боковыми лепестками ДН АС.
8 Для каждой цели Τn на интервалах по углу рыскания в ЛСК АС слева и справа от точки перегиба ПХ цели система производит определение (вычисление методом наименьших квадратов наклона (А1, А2) и смещения (B1, В2) по углу рыскания) двух прямых, аппроксимирующих склоны ПХ в окрестностях точки перегиба. При этом граничным значением каждого интервала является точка перегиба, ширина интервала принимается примерно равной половине ширины ДН АС по точкам пересечения «суммарной» и увеличенной на 3 дБ «разностной» ДН моноимпульсной АС, и каждый интервал должен охватывать не менее пяти элементов массива:


где Α1, А2 - наклон первой и второй аппроксимирующей прямой;
B1, В2 - смещение первой и второй аппроксимирующей прямой;
N1, N2 - количество элементов массива для первой и второй аппроксимирующей прямой;
psii - угол рыскания в ЛСК АС в i-м элементе массива;
 - отношение уровней сигналов от цели на «суммарном» и
- отношение уровней сигналов от цели на «суммарном» и
«разностном выходах АС, расположенное в i-м элементе массива.
9 Для каждой цели определяется угол рыскания (psipсн) в ЛСК точки пересечения аппроксимирующих прямых и пропорция (Р), в которой указанная точка пересечения делит интервал (psiR-psiL) между ближайшими к ней слева (psiL) и справа (psiR) значениями углов рыскания РСН АС в ЛСК, взятыми из соответствующих элементов массива данных сканирования:
После завершения действий пп. 4-9 для каждой цели будут известны:
- измеренная дальность (D) до каждой цели;
- два элемента массива данных сканирования, хранящие положения РСН антенны по углу рыскания в ЛСК, ближайшие слева и справа к точке пересечения прямых, аппроксимирующих ПХ каждой цели;
- значение пропорции (Р), в которой точка пересечения аппроксимирующих прямых ПХ каждой цели делит интервал между ближайшими слева и справа от нее положениями РСН АС по углу рыскания в ЛСК.
10 Для каждой цели система находит угловые положения (углы рыскания, тангажа и крена) систем координат (ЛСК в ССК, ССК в ПНСК), соответствующие моменту прохождения РСН АС при сканировании через точку пересечения аппроксимирующих прямых, используя для этого значение пропорции (Р), в которой точка пересечения аппроксимирующих прямых делит интервал по углу рыскания между ближайшими к ней слева и справа значениями угла рыскания РСН АС в ЛСК, и границы интервалов по соответствующим углам, взятые из элементов массива данных сканирования, в которых находятся ближайшие к точке пересечения аппроксимирующих прямых значения угла рыскания РСН АС в ЛСК:

где
αL, αR -значения границ интервалов положений систем координат по соответствующему углу, взятые из элементов массива данных сканирования, в которых находятся ближайшие к точке пересечения аппроксимирующих прямых значения угла рыскания РСН АС в ЛСК;
 - угловое положение систем координат по соответствующему углу для момента прохождения РСН АС через точку пересечения аппроксимирующих прямых;
- угловое положение систем координат по соответствующему углу для момента прохождения РСН АС через точку пересечения аппроксимирующих прямых;
Ρ - значение пропорции, в которой точка пересечения аппроксимирующих прямых делит интервал по углу рыскания между ближайшими к ней слева и справа значениями угла рыскания РСН АС в ЛСК.
11 Для каждой цели Τn система определяет параметры плоскости пеленга, в которой располагается цель, при этом:
11.1 Для АС, кроме АС в виде одномерной антенной решетки, в качестве плоскости пеленга цели используется проходящая через начало координат плоскость, перпендикулярная плоскости XOZлск, и составляющая с осью ОХлск угол рыскания (psi).
Из курса аналитической геометрии в пространстве известно, что уравнение плоскости может задаваться местоположением в пространстве трех точек плоскости [x0,y0,z0], [x1,y1,z1], [x2,y2,z2]. Уравнение плоскости пеленга цели в этом случае (в правой прямоугольной системе координат) будет иметь вид:
В качестве таких точек для плоскости пеленга цели используется точка Р0 с координатами [0, 0, 0] (точка начала координат), точка Р1 с координатами [0, 1, 0] (точка конца единичного вектора из начала координат вдоль оси OYлск), и точка Р2 с координатами [cos(psi), 0, -sin(psi)] (точка конца единичного вектора из начала координат по линии пересечения плоскости пеленга цели с плоскостью ХлскOZлск).
С учетом того, что точка Р0 начала координат имеет нулевые значения в ЛСК, ССК и ПНСК, и после раскрытия определителя уравнение плоскости пеленга в ЛСК, ССК и ПНСК будет иметь вид:

где
х, у, z - координаты точек на плоскости в выбранной системе координат;
x1,y1,z1 и x2,y2,z2 - координаты известных точек P1, Р2 плоскости в
выбранной системе координат.
11.2 Для АС в виде одномерной антенной решетки в качестве плоскости пеленга цели используется плоскость основания круглого конуса, ось вращения которого совпадает с направлением раскрыва элементов решетки АС, образующей конуса является линия отклонения точки пересечения аппроксимирующих прямых ПХ цели по углу рыскания от оси OZлск, составляющая с осью OZлск угол (psi+π/2), и длина образующей конуса равна измеренной дальности D до цели.
Плоскость основания конуса перпендикулярна оси вращения конуса, совпадающей с осью OZлск (т.е. перпендикулярна вектору из начала координат в точку пересечения плоскости основания конуса с осью OZлск). Учитывая, что длина образующей конуса равна дальности D, и угол отклонения образующей конуса от оси вращения равен углу рыскания (psi), увеличенному на π/2, длина вектора из начала координат (из вершины конуса) в точку пересечения плоскости основания конуса с осью OZлск будет

Из курса аналитической геометрии в пространстве известно, что уравнение плоскости может задаваться через координаты вектора, перпендикулярного ей, и координаты точки на плоскости. Можно показать, что уравнение плоскости (плоскости основания круглого конуса) будет иметь вид:

если вектор начинается в начале системы координат [0, 0, 0] и оканчивается (пересекает плоскость) в точке [x1, y1, z1], а в качестве точки на плоскости используется точка с координатами [x1, y1, z1].
С учетом того, что длина указанного вектора равна [D⋅cos(psi+π/2)], и, с другой стороны, квадрат длины вектора равен (xl2+yl2+zl2), уравнение плоскости (в любой правой прямоугольной системе координат) будет иметь вид:

где
х, у, z - координаты точек на плоскости в выбранной системе координат;
x1,y1,z1 - координаты точки пересечения плоскости и нормального вектора к ней из начала координат.
12 Система пересчитывает координаты известных точек для плоскостей пеленга из ЛСК в ПНСК известным методом (например, по ГОСТ 20058-80):

где
(xPNSK)n, (yPNSK)n, (zPNSK)n - координаты известной точки n, пересчитанные из ЛСК в ПНСК;
mssk→pnsk, mlsk→ssk - матрицы пересчета координат из ССК в ПНСК и из ЛСК в ССК соответственно, составленные по известным правилам (например, по ГОСТ 20058-80) с использованием значений углов рыскания, тангажа и крена соответствующих систем координат;
(xLSK)n, (yLSK)n, (zLSK)n - координаты точки n в ЛСК.
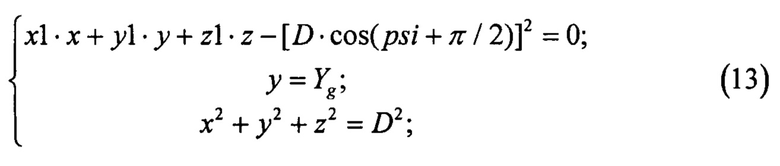
13 Система рассчитывает возможные координаты цели, как координаты точек пересечения плоскости пеленга цели, плоскости высоты цели, полученной от цели или равной высоте целеуказания, и сферы дальности до цели с центром в начале ПНСК. Координаты точек пересечения указанных поверхностей определяются как корни системы уравнений, описывающих соответствующую поверхность:
- система уравнений для всех АС, кроме АС в виде одномерных антенных решеток;

- система уравнений для АС в виде одномерных антенных решеток;
где
x, у, z - координаты точек пересечения плоскостей и сферы в ПНСК;
x1,y1,z1 и x2,y2,z2 - координаты известных точек плоскости в ПНСК;
Yg - высота цели в ПНСК, сообщенная целью или определенная из целеуказания;
D - измеренная дальность до цели;
psi - угол рыскания направления на цель в ЛСК.
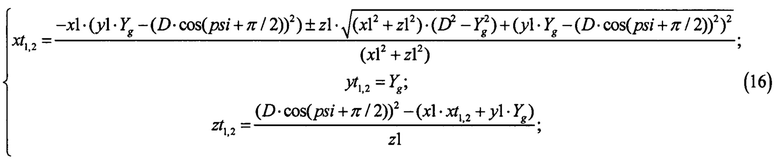
В результате решения систем уравнений известными методами корнями систем уравнений являются координаты пары точек T1[xt1,yt1,zt1] и T2[xt2, yt2, zt2].
Можно показать, что для АС, кроме АС в виде одномерных антенных решеток, корни системы уравнений определяются по формулам:

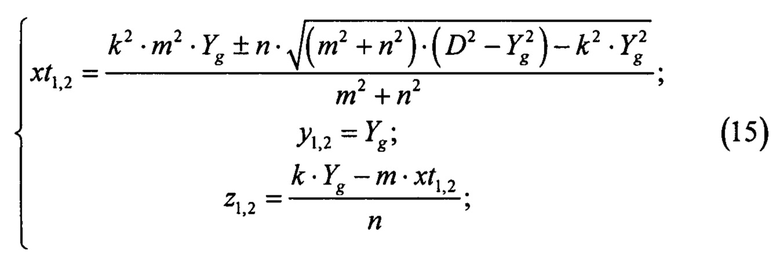
Можно показать, что для АС в виде одномерной антенной решетки корни системы определяются по формулам:
При расчетах по указанным формулам для АС в виде одномерной решетки возможны два специальных случая:
- первый специальный случай: при значении угла psi=0 круглый конус вырождается в плоскость XOYлск. В этом случае плоскость пеленга определяется двумя единичными векторами с координатами [1,0,0] и [0,1,0], и расчет ведется по формулам (15);
- второй специальный случай: плоскость основания круглого конуса параллельна плоскости ΧΟΖпнск и не пересекается с плоскостью высоты цели. В этом случае метод не применяется.
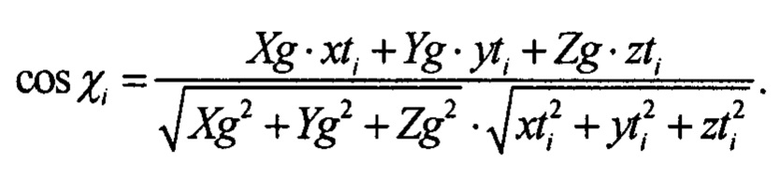
14 Из пары точек возможных координат для каждой цели отбирается точка, удовлетворяющая требованию допустимости координат: (высота носителя + yt1)>0, (высота носителя + yt2)>0 (цель должна располагаться выше уровня земной поверхности), и имеющая меньшее отклонение от направления целеуказания. Меньшее отклонение направления на точку от направления целеуказания определяется по большему значению косинуса угла между ними, рассчитываемому следующим образом:
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| Способ и система для определения координат цели в системе "запрос-ответ" | 2016 |
|
RU2666360C1 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| Способ определения координат цели в системе "запрос-ответ" | 2020 |
|
RU2742945C1 |
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
Изобретение относится к способу определения координат целей с помощью аппроксимированной пеленгационной характеристики (ПХ). Для определения координат целей производят пошаговое сканирование пространства по угловой координате для набора и запоминания полных последовательностей сигналов от целей с выходов антенной системы (АС), образующих ПХ целей, обрабатывают каждую ПХ определенным образом, определяют точки перегиба каждой ПХ, вычисляют точки пересечения аппроксимирующих прямых справа и слева от точки перегиба, запоминают угловое положение равносигнального направления АС (РСН) в подвижной нормальной системе координат, вычисляют угловое направление на цель определенным образом, используя полученные значения. Обеспечивается повышение точности определения углового направления на цель. 1 з.п. ф-лы.
1. Способ определения координат целей с помощью аппроксимированной пеленгационной характеристики (ПХ), включающий пошаговое сканирование пространства по угловой координате для набора и запоминания полных последовательностей сигналов от целей с выходов антенной системы (АС), образующих ПХ целей, обработку каждой ПХ путем интерполяции отсутствующих данных и последующего усреднения данных, определения точек перегиба каждой ПХ, вычисления для каждой ПХ двух прямых, аппроксимирующих склоны ПХ слева и справа от точки перегиба, и вычисления точки пересечения аппроксимирующих прямых, отличающийся тем, что при сканировании пространства для каждого шага сканирования дополнительно запоминается угловое положение равносигнального направления (РСН) АС в подвижной нормальной системе координат (ПНСК), а вычисленному угловому направлению на цель соответствует угловое направление точки на угловом интервале между ближайшими к точке пересечения аппроксимирующих прямых положениями РСН АС в ПНСК на соответствующих шагах сканирования, причем отношение частей интервала от соответствующей угловому направлению цели точки до ближайших положений РСН АС в ПНСК равно отношению частей интервала от точки пересечения аппроксимирующих прямых до ближайших положений РСН АС в ЛСК на соответствующих шагах сканирования.
2. Способ по п. 1, отличающийся тем, что при сканировании пространства для каждого шага сканирования дополнительно запоминаются значения уровней сигналов от целей на «суммарном» выходе АС, которые затем используются для исключения ложных точек перегиба ПХ цели, возникающих на боковых лепестках диаграммы направленности АС.
| Способ и система определения координат цели в системе запрос-ответ | 2016 |
|
RU2631117C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| СПОСОБ МОНОИМПУЛЬСНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 1992 |
|
RU2033627C1 |
| WO 2001059473 A2, 16.08.2001 | |||
| Запорное устройство | 1980 |
|
SU909393A1 |

