Техническое решение относится к измерительной технике, в частности к устройствам для определения параметров транспортного средства и скорости его перемещения в потоке. Предназначено для выявления и фиксации нарушений безопасности дорожного движения.
Известны способ и устройство для отслеживания состояния движущегося объекта, и система для быстрой инспекции транспортного средства (RU 2655694 C2, 29.09.2016, МПК G01P 3/36, G01S 17/06), позиционирующие и измеряющие скорость движущегося объекта посредством использования лазерного сканера. Устройство включает в себя лазерный сканер, выполненный с возможностью отслеживать, по меньшей мере, один движущийся объект, въезжающий в область отслеживания, посредством испускания множества лазерных лучей с различными углами, по меньшей мере, в один движущийся объект с предварительно установленной частотой сканирования. При этом модуль обработки выполнен с возможностью для каждого движущегося объекта определять и выводить относительную позицию движущегося объекта относительно лазерного сканера в каждый момент времени.
Техническое решение предназначено для определения скорости транспортного средства. Недостатком является отсутствие возможности определения габаритных параметров.
Известно устройство для измерения и определения параметров автомобилей в потоке, (RU 140884 U1, 03.10.2013, МПК G01G 19/03), содержащее весоприемные модули, считывающее устройство, выполненное в виде видеокамеры, пост контроля, кабельные линии связи, причем в него введены датчики проезда колеса по числу весоприемных модулей, электронный блок предварительного преобразования и обработки сигналов, лазерный детектор высоты автомобиля с дублированными лучами лазера, оптоволоконная линия связи, при этом весоприемные модули, считывающее устройство и лазерный детектор высоты автомобиля с дублированными лучами лазера соединены с электронным блоком предварительного преобразования и обработки сигналов, который соединен с постом контроля оптоволоконной линией связи, а каждый датчик проезда колеса расположен перед соответствующим весоприемным модулем.
Недостатком известного технического решения является отсутствие возможности определения габаритных параметров транспортного средства, таких как длина и ширина.
Наиболее близкой по технической сущности является система для автоматизированного контроля движения транспортных средств (RU 2292085 C1, 04.05.2005, МПК G08G 1/01), характеризующаяся расположением радиолокационных сенсоров непосредственно над каждой из полос движения под наклоном диаграммы направленности относительно вертикальной оси. В блоке регистрации и управления имеются устройства определения скорости движения ТС по доплеровской частоте сигнала и классификации по объему ТС, обеспечивая многополосный контроль движения ТС с оценкой их габаритов, скорости движения, числа в единицу времени.
Недостатком прототипа является лишь условное (неточное) определение объема транспортного средства.
Технический результат - создание системы определения параметров транспортного средства с расширенными функциональными возможностями, вследствие которых предоставляется возможность определения точных параметров транспортного средства (длины, ширины, высоты) и, как результат, - повышение эффективности контроля за состоянием транспортного потока.
Технический результат достигается тем, что система лазерного сканирования для определения параметров транспортного средства в потоке движения включает модули обнаружения и сканирования транспортного средства, установленные над дорожным полотном, также включает устройство регистрации и обработки информации.
Система характеризуется тем, что модуль обнаружения транспортного средства представляет собой конфигурацию из неподвижных измерителей длины лазерных (лазерных дальномеров), сориентированных в пространстве таким образом, что формируют по крайней мере две измерительные лазерные линии (лучи), направленные в разные направления относительно полосы движения, служащие для определения нахождения транспортного средства в зоне контроля. Модуль сканирования транспортного средства представляет собой конфигурацию из, по крайней мере, двух лазерных 2D-сканеров, располагаемых над проезжей частью полосы движения, так что при сканировании пространства образуют единую плоскость измерения, перпендикулярную направлению движения, при пересечении транспортным средством которой формируется набор точек с двумерными координатами X и Y. При этом устройством регистрации и обработки информации производится расчет Z координат по скорости движущегося объекта и времени каждого сканирования, формируется облако пространственных точек, по которым производится расчет высоты, ширины и длины транспортного средства и построение его трехмерного изображения.
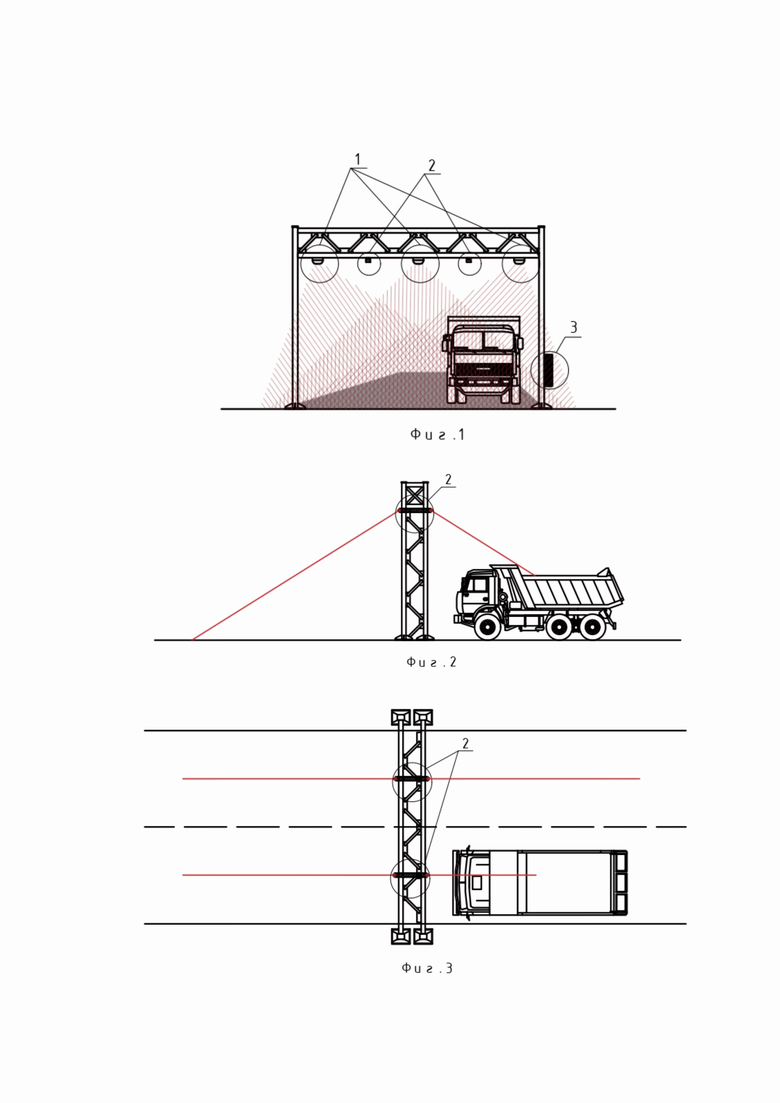
Система поясняется чертежами, где на фиг. 1 - система лазерного сканирования, главный вид; на фиг. 2 - система лазерного сканирования, вид сбоку; на фиг. 3 - система лазерного сканирования, вид сверху.
Система лазерного сканирования для определения параметров транспортного средства в потоке движения представляет собой, установленные над дорожным полотном, модуль обнаружения 1 и модуль сканирования 2 транспортного средства, также содержит устройство регистрации и обработки информации 3.
Модуль обнаружения транспортного средства 1 представляет собой конфигурацию из неподвижных лазерных дальномеров, сориентированных в пространстве таким образом, что формируют по крайней мере по две измерительные лазерные линии (для однополосного движения), направленные вдоль каждой из полос движения в разные направления (фиг. 2, 3).
Модуль сканирования транспортного средства 2 представляет собой конфигурацию из по крайней мере двух лазерных 2D-сканеров (для однополосного движения), располагаемых над проезжей частью полосы движения так, что при сканировании пространства образуют единую плоскость измерения (X-Y), перпендикулярную направлению движения (фиг. 1).
Устройство регистрации и обработки информации 3, на основе измерительных данных от модуля обнаружения 1 и модуля сканирования 2 транспортного средства, производит расчеты для определения скорости и габаритных параметров транспортного средства, формирует и сохраняет информацию об измерении в энергонезависимую память (фиг. 1).
Система лазерного сканирования для определения параметров транспортного средства в потоке движения предполагает работу в составе дорожного комплекса весового и габаритного контроля, также может работать как самостоятельный элемент выявления и фиксации нарушений дорожного движения и работает следующим образом.
Установленные над дорожным полотном модули обнаружения транспортного средства 1, формирующие измерительные лазерные линии (лучи), во время пересечения которых система определяет наличие транспортного средства в зоне контроля. При обнаружении передней точки движущегося объекта в поле преломления луча модуля обнаружения 1, устройством регистрации и обработки информации 3 регистрируется изменение сигнала, система выходит из режима ожидания и запускается процедура измерения. Модулем сканирования транспортного средства 2, производящего сканирование пространства последовательностью лазерных сигналов с высокой частотой, производится формирование набора измеренных расстояний (сканирований), представленных точками с двумерными координатами X и Y. Во время процедуры измерения производится фиксация времени и расстояний относительно оси установки лазерных дальномеров модуля обнаружения 1 в моменты пересечений их лучей транспортным средством. При пересечении последней точки транспортного средства в поле преломления луча модуля обнаружения 1 процедура измерения останавливается и запускается процедура расчета габаритных параметров. Первым этапом вычислений производится расчет скорости движения транспортного средства, основанный на расстоянии, пройденном от пересечения передней точки движущегося объекта в поле преломления луча модуля обнаружения 1, до пересечения последней точки движущегося объекта в поле преломления луча и промежутке времени между этими точками. Следующим этапом вычислений путем расчета Z координат, полученных на основе расчетной скорости и времени каждого сканирования, производится формирование трехмерного облака точек, представляющего собой пространственное очертание транспортного средства. По координатам трехмерного облака точек производится расчет высоты, ширины и длины транспортного средства. По окончании вычислений выполняются формирование и запись измерения в энергонезависимую память устройства регистрации и обработки информации 3, и переход системы в режим ожидания.
Система лазерного сканирования на основании расчетов довольно точно выявляет информацию о транспортных средствах, скорости потока и структуре потока. Для каждого транспортного средства с помощью программного обеспечения автоматически производится расчет скорости движения и его габаритные размеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения геометрических параметров и породно-качественного состава штабеля круглых лесоматериалов, погруженных на автотранспорт и/или прицеп, и автоматизированная система для осуществления способа | 2021 |
|
RU2778975C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ НА ОСНОВЕ ДАННЫХ ТРЕХМЕРНОГО ДАТЧИКА | 2016 |
|
RU2656711C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| Способ определения объема сыпучих грузов в движущемся транспортном средстве с использованием бесконтактного измерения | 2021 |
|
RU2772138C1 |
| СПОСОБ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794230C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373325C1 |
Изобретение относится к измерительной технике, в частности к устройствам для определения параметров транспортного средства и скорости его перемещения в потоке. Система лазерного сканирования для определения параметров транспортного средства в потоке движения включает модули обнаружения и сканирования транспортного средства, установленные над дорожным полотном, а также устройство регистрации и обработки информации. При этом модуль обнаружения транспортного средства представляет собой конфигурацию из неподвижных измерителей длины лазерных, сориентированных в пространстве таким образом, что формируют по крайней мере две измерительные лазерные линии, направленные в разные направления относительно полосы движения, служащие для определения нахождения транспортного средства в зоне контроля. Модуль сканирования транспортного средства представляет собой конфигурацию из по крайней мере двух лазерных 2D-сканеров, располагаемых над проезжей частью полосы движения, так что при сканировании пространства образуют единую плоскость измерения, перпендикулярную направлению движения, при пересечении транспортным средством которой формируется набор точек с двумерными координатами X и Y. При этом устройством регистрации и обработки информации производится расчет Z координат по скорости движущегося объекта и времени каждого сканирования, формируется облако пространственных точек, по которым производятся расчет высоты, ширины и длины транспортного средства и построение его трехмерного изображения. Технический результат – расширение функциональных возможностей, а именно определение точных параметров транспортного средства (длины, ширины, высоты). 3 ил.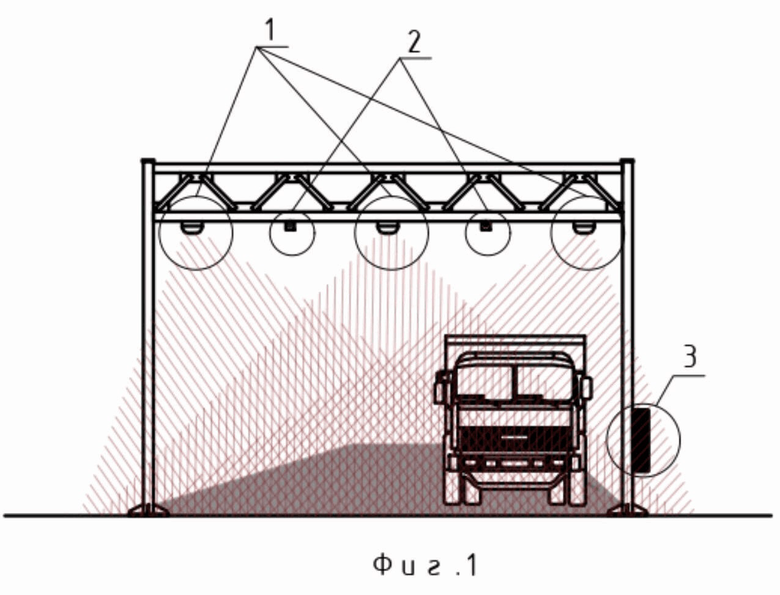
Система лазерного сканирования для определения параметров транспортного средства в потоке движения, включающая модули обнаружения и сканирования транспортного средства, установленные над дорожным полотном, включающая также устройство регистрации и обработки информации, отличающаяся тем, что модуль обнаружения транспортного средства представляет собой конфигурацию из неподвижных измерителей длины лазерных, сориентированных в пространстве таким образом, что формируют по крайней мере две измерительные лазерные линии, направленные в разные направления относительно полосы движения, служащие для определения нахождения транспортного средства в зоне контроля; при этом модуль сканирования транспортного средства представляет собой конфигурацию из по крайней мере двух лазерных 2D-сканеров, располагаемых над проезжей частью полосы движения, так что при сканировании пространства образуют единую плоскость измерения, перпендикулярную направлению движения, при пересечении транспортным средством которой формируется набор точек с двумерными координатами X и Y; при этом устройством регистрации и обработки информации производится расчет Z координат по скорости движущегося объекта и времени каждого сканирования, формируется облако пространственных точек, по которым производятся расчет высоты, ширины и длины транспортного средства и построение его трехмерного изображения.
