[0001]
Настоящее изобретение относится к способу управления движением и устройству управления движением для транспортного средства, которые включают в себя автономное управление движением.
[Уровень техники]
[0002]
Известна автоматизированная система вождения, установленная на транспортном средстве, в которой, когда водителю предлагается смена полосы движения, он/она может указать на несогласие со сменой полосы движения с помощью указателя поворота в направлении, противоположном предложенному (Патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2016-071514A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако согласно вышеупомянутому уровню техники, если водитель задействует указатель поворота с намерением выполнить смену полосы движения в направлении, противоположном предложенному направлению, сама смена полосы движения будет отменена.
[0005]
Задача, которую необходимо решить с помощью настоящего изобретения, состоит в том, чтобы предоставить способ управления движением и устройство управления движением для транспортного средства, которые способны надежно отражать запрос водителя на смену полосы движения.
[Средства для решения проблем]
[0006]
Настоящее изобретение включает в себя обеспечение способа управления движением для транспортного средства, имеющего режим запуска системы и режим запуска водителя, причем режим запуска системы представляет собой режим, в котором смена полосы движения, предложенная из автономной системы управления движением транспортного средства, выполняется посредством управления с использованием функции автоматической смены полосы движения, причем режим запуска водителя представляет собой режим, в котором смена полосы движения, указанная водителем транспортного средства, выполняется с использованием функции автоматической смены полосы движения, при этом когда операция инструктирования смены полосы движения водителем обнаруживается после информации о смене полосы движения относительно того, выполняется ли смена полосы движения, представлена в режиме запуска системы, режим запуска водителя используется для выполнения смены полосы движения с помощью операции инструктирования смены полосы движения.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, когда водитель выполняет операцию инструктирования смены полосы движения после представления информации о смене полосы движения, функция автоматической смены полосы движения выполняется в режиме запуска водителя, и поэтому может быть отражено намерение водителя сменить полосу движения.
[Краткое описание чертежей]
[0008]
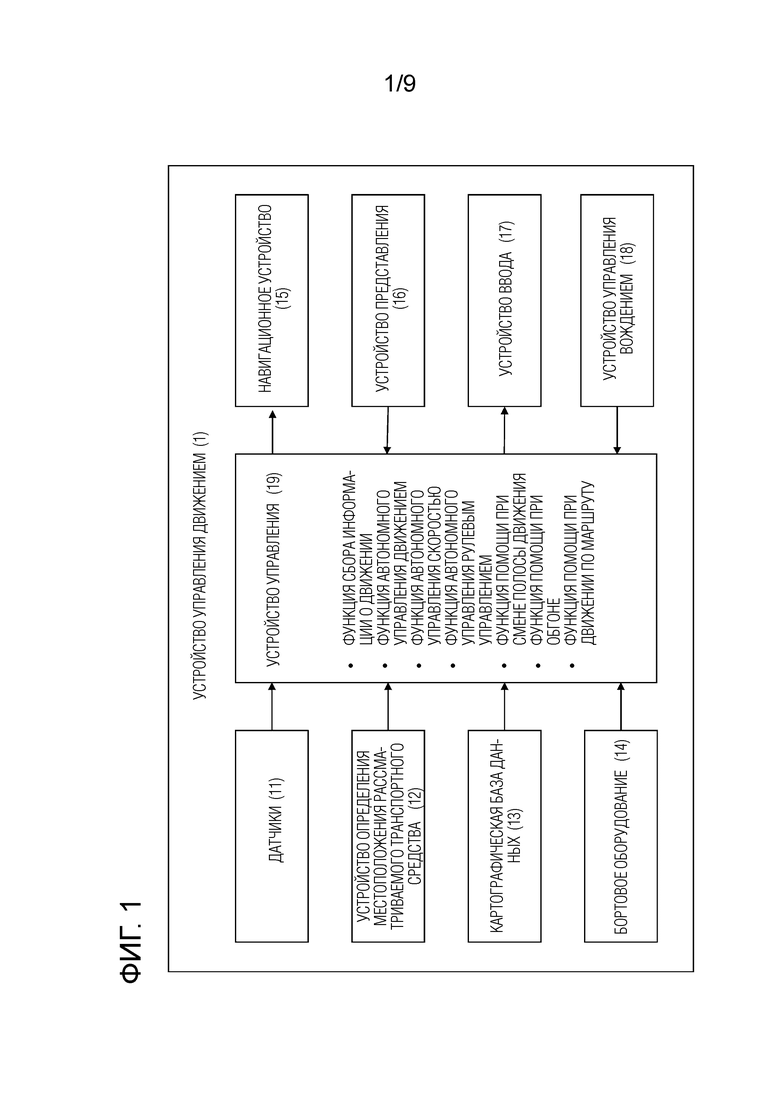
ФИГ. 1 представляет собой блок-схему, иллюстрирующую вариант осуществления устройства управления движением для транспортного средства согласно настоящему изобретению.
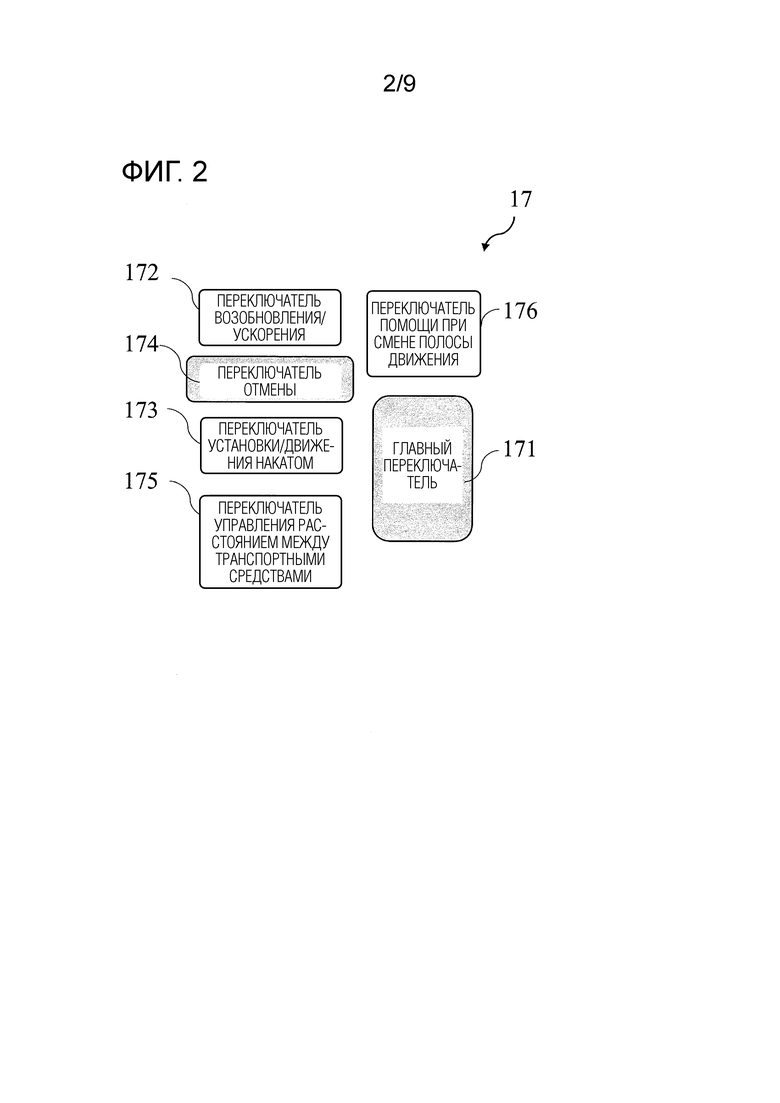
ФИГ. 2 - вид спереди, иллюстрирующий часть устройства ввода по фиг. 1.
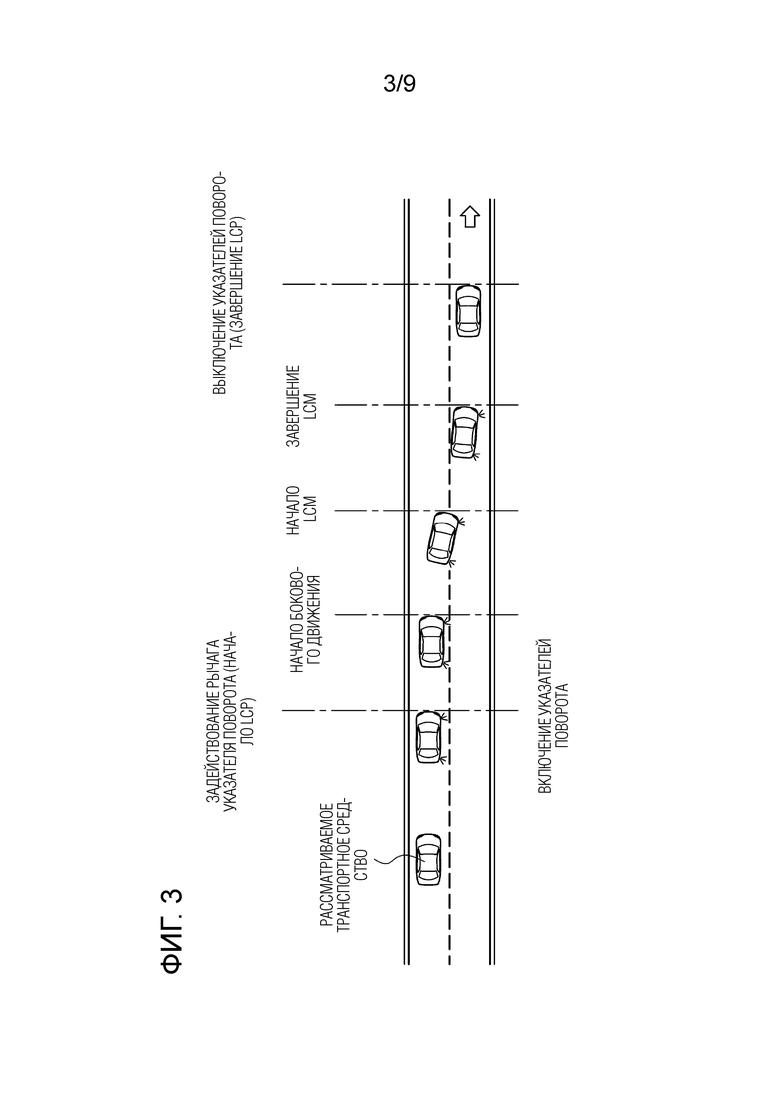
ФИГ. 3 - вид сверху, иллюстрирующий автоматическое (автономное) управление сменой полосы движения с использованием функции помощи при смене полосы движения.
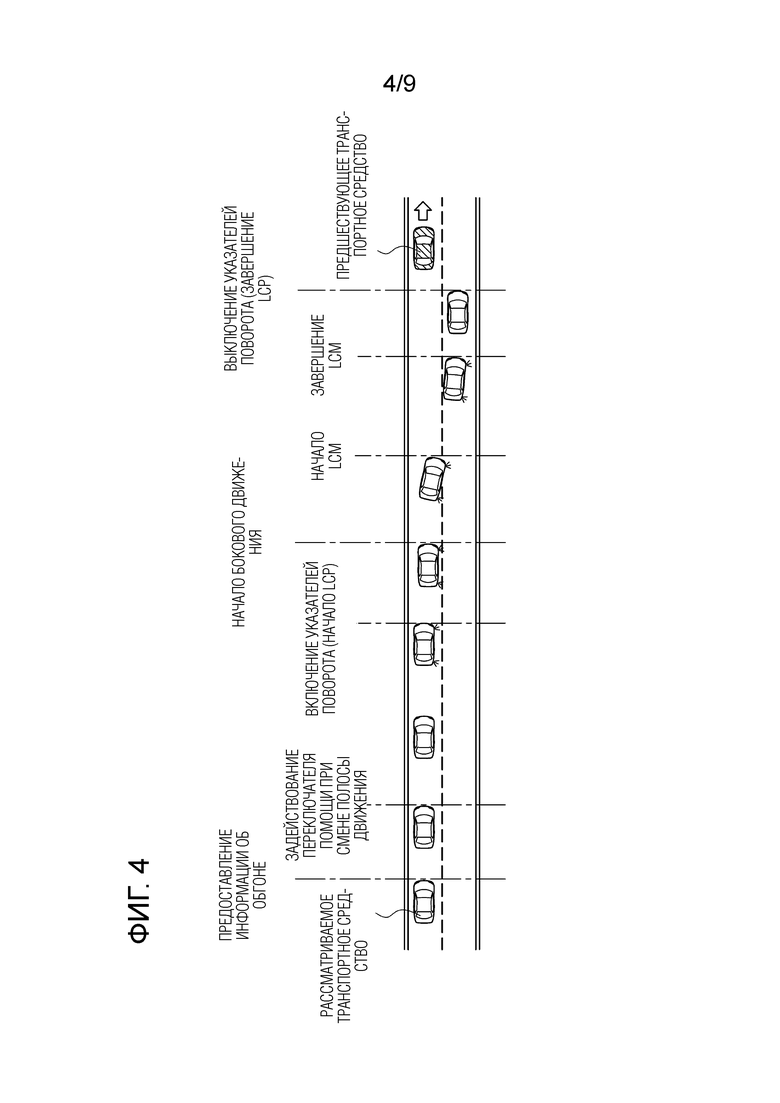
ФИГ. 4 - вид сверху, иллюстрирующий автоматическое (автономное) управление сменой полосы движения на соседнюю полосу движения с использованием функции помощи при обгоне.
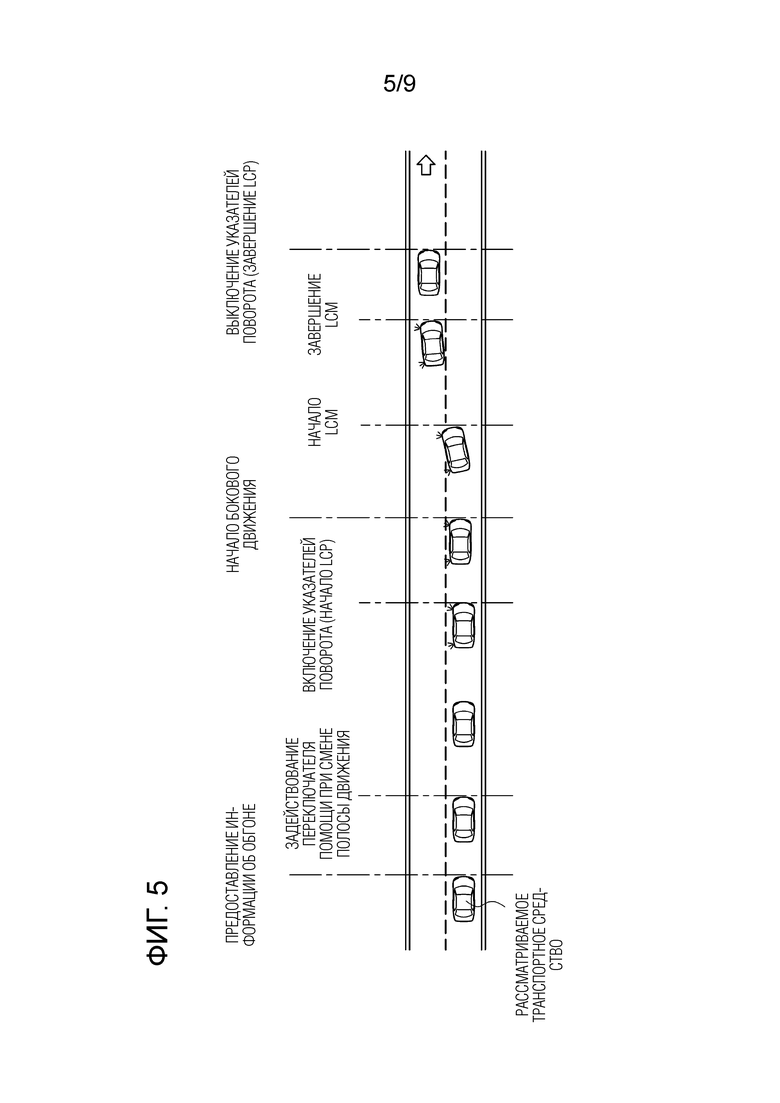
ФИГ. 5 - вид сверху, иллюстрирующий автоматическое (автономное) управление сменой полосы движения на исходную полосу движения с использованием функции помощи при смене полосы движения.
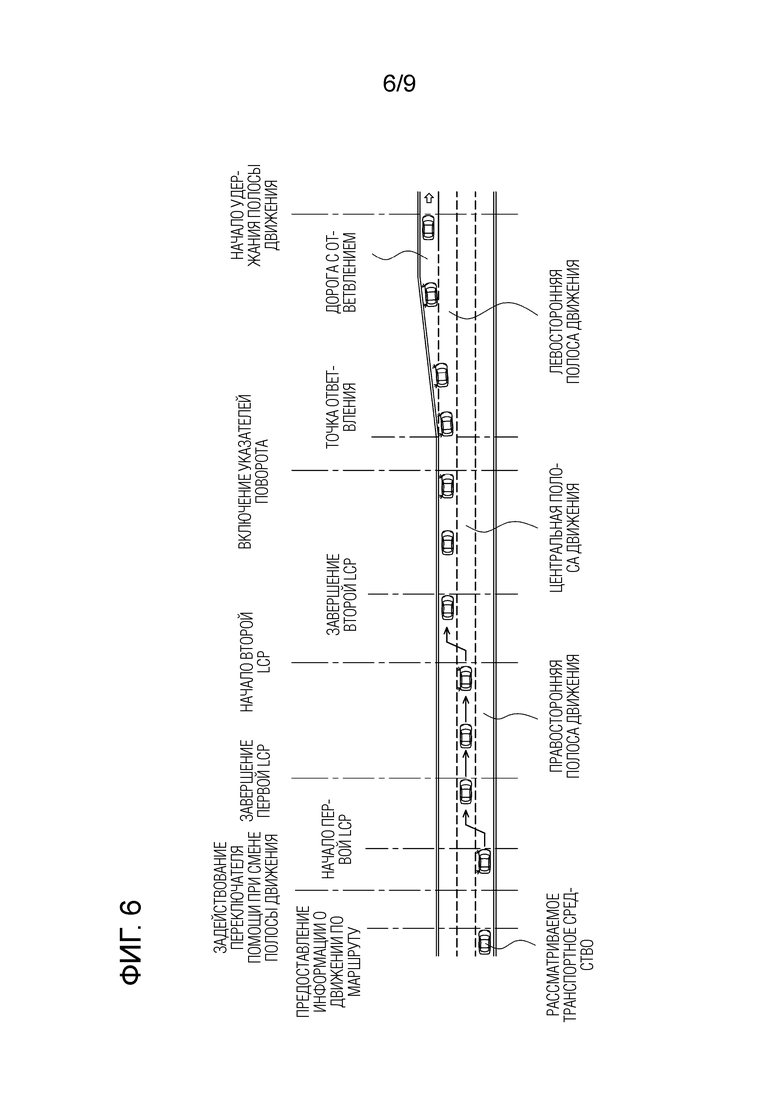
ФИГ. 6 - вид сверху, иллюстрирующий автоматическое (автономное) управление сменой полосы движения с использованием функции помощи при движении по маршруту.
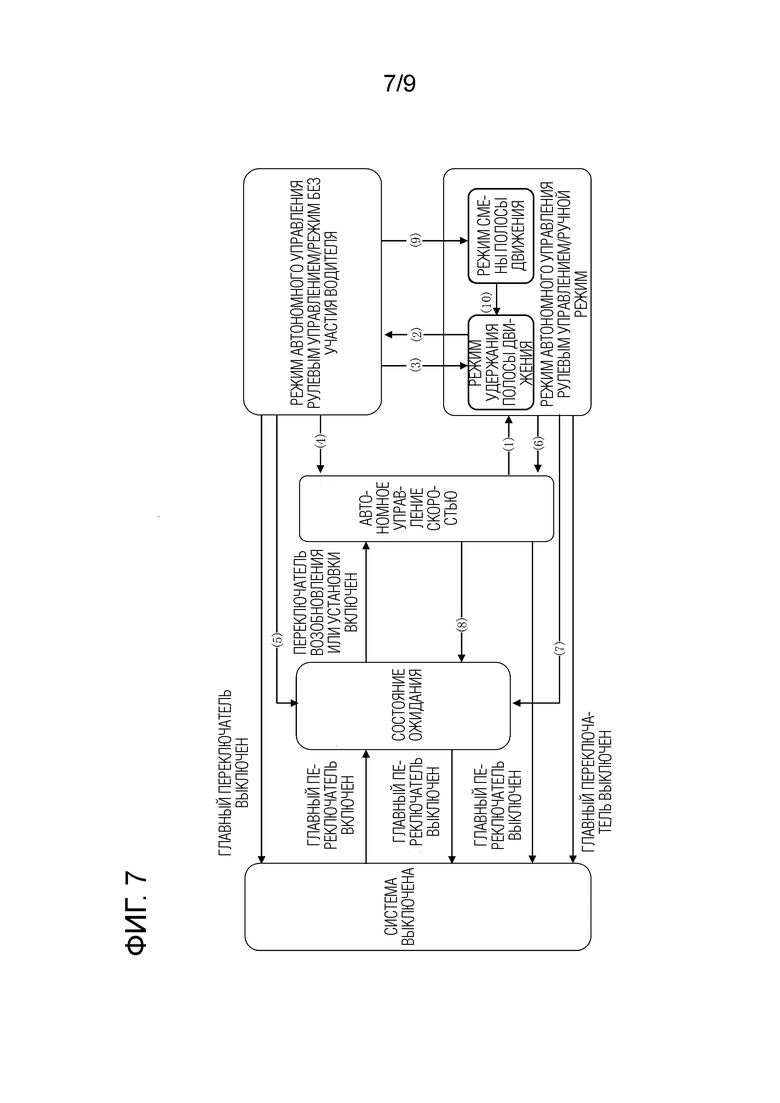
ФИГ. 7 - блок-схема, иллюстрирующая переход между состояниями устройства управления по фиг. 1.
ФИГ. 8 - блок-схема, иллюстрирующая основной процесс управления движением устройства управления движением для транспортного средства согласно настоящему изобретению.
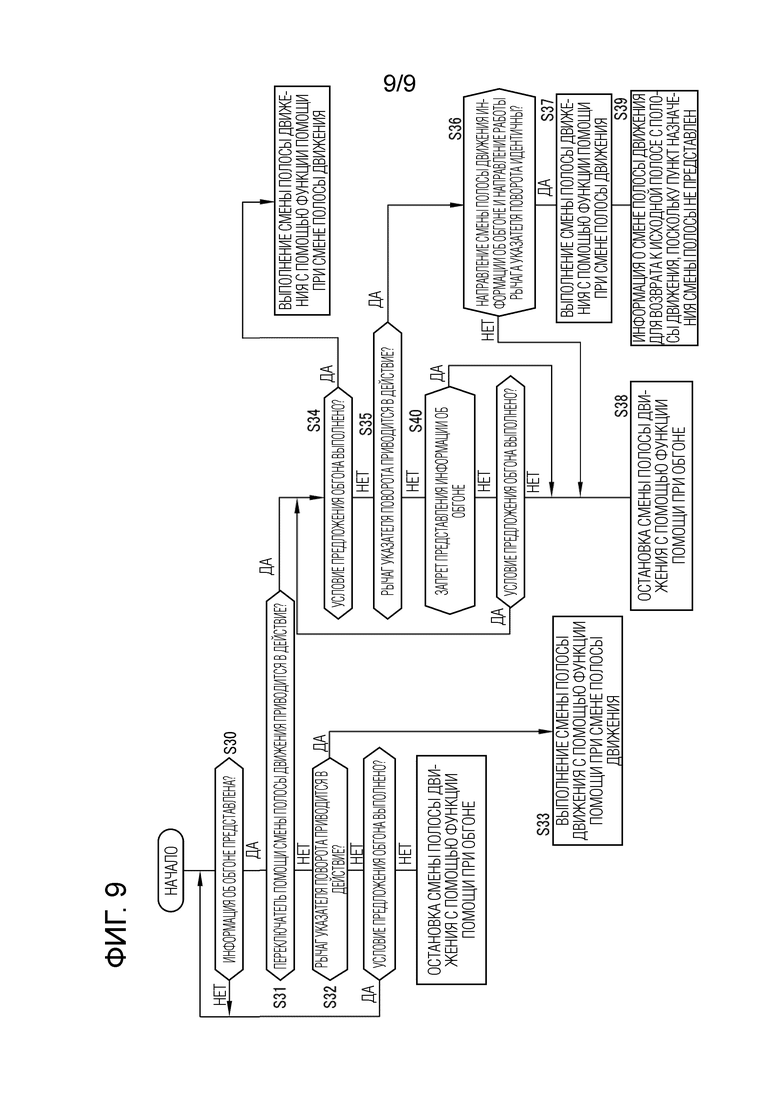
ФИГ. 9 - блок-схема, иллюстрирующая процесс управления движением устройства управления движением для транспортного средства согласно первому варианту осуществления.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
ФИГ. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 1 управления движением для транспортного средства (также называемого в дальнейшем «рассматриваемое транспортное средство») согласно варианту осуществления настоящего изобретения. Устройство 1 управления движением для транспортного средства согласно настоящему варианту осуществления представляет вариант осуществления для выполнения способа управления движением для транспортного средства согласно настоящему изобретению. Как показано на фиг. 1, устройство 1 управления движением для транспортного средства согласно настоящему варианту осуществления включает в себя датчики 11, устройство 12 определения местоположения рассматриваемого транспортного средства, картографическую базу данных 13, бортовое оборудование 14, навигационное устройство 15, устройство 16 представления, устройство 17 ввода, устройство 18 управления приводом и устройство 19 управления. Эти устройства соединены друг с другом, например, через сеть контроллеров (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0010]
Датчики 11 обнаруживают состояние движения рассматриваемого транспортного средства. Датчики 11 включают в себя, например, камеры, такие как передняя камера, которая фиксирует изображения впереди рассматриваемого транспортного средства, задняя камера, которая фиксирует изображения позади рассматриваемого транспортного средства, и боковые камеры, которые фиксируют изображения с правой и левой сторон рассматриваемого транспортного средства. Дополнительно или в качестве альтернативы, датчики 11 включают в себя радарные устройства, такие как передний радар, который обнаруживает препятствия впереди рассматриваемого транспортного средства, задний радар, который обнаруживает препятствия позади рассматриваемого транспортного средства, и боковые радары, которые обнаруживают препятствия, существующие с правой и левой стороны рассматриваемого транспортного средства. Дополнительно или в качестве альтернативы, датчики 11 включают в себя датчик скорости транспортного средства, который определяет скорость транспортного средства рассматриваемого транспортного средства, сенсорный датчик (датчик емкости), который обнаруживает удерживание рулевого колеса водителем, монитор водителя, который фиксирует изображения водителя, и так далее. Датчики 11 могут быть представлены одним из вышеописанных различных датчиков или также могут быть сконфигурированы как комбинация двух или более датчиков. Результаты обнаружения/определения датчиков 11 выводятся в устройство 19 управления с предопределенными временными интервалами.
[0011]
Устройство 12 определения местоположения рассматриваемого транспортного средства включает в себя блок GPS, гироскоп, датчик скорости транспортного средства и т.д. Устройство 12 определения местоположения рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи, используя блок GPS, чтобы периодически получать информацию о местоположении целевого транспортного средства (рассматриваемого транспортного средства). Кроме того, устройство 12 определения положения рассматриваемого транспортного средства определяет текущее положение целевого транспортного средства на основе полученной информации о местоположении целевого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Устройство 12 определения местоположения рассматриваемого транспортного средства выводит обнаруженную информацию о местоположении целевого транспортного средства в устройство 19 управления через заранее определенные интервалы времени.
[0012]
Картографическая база данных 13 представляет собой память, которая хранит трехмерную высокоточную картографическую информацию, включая информацию о местоположении различных объектов и конкретных точек, и доступна с устройства 19 управления. Трехмерная высокоточная картографическая информация представляет собой информацию о трехмерной карте, основанную на форме дороги, обнаруженной при движении по реальной дороге с использованием транспортного средства для сбора данных. Трехмерная высокоточная картографическая информация - это картографическая информация, в которой подробные и высокоточные элементы позиционной информации, такие как изогнутая дорога и размер кривой (например, кривизна или радиус кривизны), точка слияния и точка ветвления. дороги, шлагбаума и позиции, в которой количество полос сокращается, связаны с картографической информацией как трехмерной информацией.
[0013]
Бортовое оборудование 14 включает в себя различные модули, оборудованные в транспортном средстве и управляемые водителем. Примеры такого бортового оборудования включают рулевое колесо, педаль акселератора, педаль тормоза, указатели поворота, дворники, фонари, звуковой сигнал и другие специальные переключатели. Когда водитель управляет бортовым оборудованием 14, информация о его работе выводится на устройство 19 управления.
[0014]
Навигационное устройство 15 получает текущую информацию о местоположении рассматриваемого транспортного средства от устройства 12 определения положения рассматриваемого транспортного средства и накладывает положение рассматриваемого транспортного средства на информацию карты для навигации, чтобы отображать положение рассматриваемого транспортного средства и информацию карты на дисплее или тому подобное. Кроме того, навигационное устройство 15 имеет функцию навигации по установке маршрута к пункту назначения и указания водителю по заданному маршруту, когда пункт назначения задан. Эта функция навигации служит для отображения маршрута на карте дисплея и информирования водителя о маршруте голосом и т.д. Маршрут, установленный навигационным устройством 15, также используется в функции помощи при движении по маршруту устройства 19 управления. Функция помощи при движении по маршруту - это функция, используемая для управления рассматриваемым транспортным средством для автономного движения к пункту назначения на основе заданного маршрута.
[0015]
Устройство 16 представления включает в себя, например, один или несколько дисплеев, таких как дисплей навигационного устройства 15, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в измерительный блок, и проекционный дисплей, проецируемый на лобовое стекло. Дополнительно или альтернативно, презентационное устройство 16 включает в себя одно или несколько устройств, отличных от дисплеев, таких как динамик аудиоустройства и сиденье со встроенными вибрирующими телами. Устройство 16 представления информирует водителя о различных элементах информации представления под управлением устройства 19 управления.
[0016]
Устройство 17 ввода представляет собой, например, устройство, такое как кнопочный переключатель или сенсорная панель, расположенная на экране дисплея, с помощью которой водитель может вводить информацию с помощью ручного управления, или микрофон, с помощью которого водитель может вводить информацию голосом. В настоящем варианте осуществления водитель может управлять устройством 17 ввода, тем самым вводя информацию настройки в ответ на информацию представления, которая представлена устройством 16 представления. ФИГ. 2 представляет собой вид спереди, иллюстрирующий часть устройства ввода 17 настоящего варианта осуществления, и представляет пример, включающий в себя набор кнопочных переключателей, расположенных на части со спицами или подобном элементе рулевого колеса. Изображенное устройство 17 ввода представляет собой кнопочный переключатель, используемый при включении/выключении или т.п. функции автономного управления движением (функция автономного управления скоростью и функция автономного управления рулевым управлением) устройства 19 управления. Устройство ввода 17 включает в себя главный переключатель (MAIN SW) 171, переключатель возобновления/ускорения (RES +) 172, переключатель установки/движения накатом (SET -) 173, переключатель отмены (CANCEL) 174, регулировку расстояния между транспортными средствами. переключатель (DISTANCE) 175 и переключатель помощи при смене полосы движения (L/C) 176.
[0017]
Главный переключатель 171 представляет собой переключатель для включения/выключения источника питания системы, который выполняет функцию автономного управления скоростью и функцию автономного управления рулевым управлением устройства 19 управления. Переключатель 172 возобновления/ускорения представляет собой переключатель для выключения работы функции автономного управления скоростью и затем возобновления автономной функции управления скоростью на заданной скорости перед состоянием ВЫКЛ, для увеличения заданной скорости и/или для выполнения предшествующего транспортное средство, чтобы остановиться, а затем перезапустить. Переключатель 173 установка/движение накатом представляет собой переключатель для запуска функции автономного управления скоростью при скорости движения и/или снижения установленной скорости. Переключатель 174 отмены представляет собой переключатель для выключения функции автономного управления скоростью. Переключатель 175 регулировки расстояния между транспортными средствами - это переключатель для установки расстояния между транспортными средствами от предшествующего транспортного средства и, например, переключатель для выбора одного из множества этапов настройки, таких как короткое расстояние/среднее расстояние/большое расстояние. Переключатель 176 помощи при смене полосы движения является переключателем для подачи команды (одобрения) начала смены полосы движения, когда устройство 19 управления подтверждает начало смены полосы движения с водителем. Посредством приведения в действие переключателя 176 помощи при смене полосы движения в течение более длительного времени, чем заданное время после одобрения начала смены полосы движения, одобрение смены полосы движения, предложенной устройством 19 управления, может быть отменено.
[0018]
Дополнительно или в качестве альтернативы набору кнопочных переключателей, показанных на фиг. 2, рычаг указателя поворота для указателей поворота или переключатель другого бортового оборудования 14 может использоваться в качестве устройства 17 ввода. Например, в случае, когда устройство 19 управления предлагает, следует ли автоматически менять полосу движения, когда водитель управляет рычагом указателя поворота, смена полосы движения выполняется в направлении, в котором приводится в действие рычаг указателя поворота, а не Предлагаемая смена полосы движения. Устройство 17 ввода выводит информацию о настройке ввода на устройство 19 управления.
[0019]
Устройство 18 управления вождением управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство движется с постоянной заданной скоростью с использованием функции автономного управления скоростью, устройство 18 управления движением управляет работой приводного механизма и работой тормоза для достижения ускорения/замедления и скорости движения так, чтобы скорость рассматриваемого транспортного средства становится установленной скоростью. Дополнительно или альтернативно, также когда рассматриваемое транспортное средство движется, чтобы следовать за предшествующим транспортным средством, используя функцию автономного управления скоростью, устройство 18 управления движением управляет работой приводного механизма и тормоза аналогично описанному выше. Управление работой приводного механизма включает в себя управление работой двигателя внутреннего сгорания в случае транспортного средства с двигателем и управление работой электродвигателя для движения в случае электромобиля. В случае гибридного транспортного средства управление работой приводного механизма включает в себя управление распределением крутящего момента для двигателя внутреннего сгорания и электродвигателя для движения.
[0020]
Устройство 18 управления движением управляет работой рулевого привода с использованием функции автономного управления рулевым управлением в дополнение к вышеописанному управлению работой приводного механизма и тормоза и, таким образом, выполняет рулевое управление рассматриваемого транспортного средства. Например, при выполнении управления удержанием полосы движения с использованием функции автономного управления рулевым управлением устройство 18 управления движением обнаруживает следы полосы движения рассматриваемого транспортного средства для движения рассматриваемого транспортного средства и управляет положением движения рассматриваемого транспортного средства в направлении ширины дороги, так что что рассматриваемое транспортное средство движется в определенном месте на полосе движения рассматриваемого транспортного средства. Дополнительно или в качестве альтернативы, при выполнении функции помощи при смене полосы движения, функции помощи при обгоне или функции помощи при движении по маршруту, которые будут описаны позже, с использованием функции автономного управления рулевым управлением, устройство 18 управления движением управляет положением движения рассматриваемого транспортного средства в направлении ширины дороги, чтобы объект съемки перестроился на другую полосу движения. Дополнительно или альтернативно, при выполнении функции помощи при повороте вправо или влево с использованием функции автономного управления рулевым управлением, устройство 18 управления движением выполняет управление движением при повороте вправо или влево на перекрестке и т.п. Устройство 18 управления движением управляет движением рассматриваемого транспортного средства в соответствии с командами от устройства 19 управления, которые будут описаны ниже. Любой из других известных способов также может использоваться в качестве метода управления движением, выполняемого устройством 18 управления приводом.
[0021]
Устройство 19 управления включает постоянное запоминающее устройство (ПЗУ), в котором хранятся программы для управления движением рассматриваемого транспортного средства, центральный процессор (ЦП), который выполняет программы, хранящиеся в ПЗУ, оперативное запоминающее устройство (ОЗУ), которое служит в качестве доступное запоминающее устройство и т. д. В качестве замены или в дополнение к ЦП могут использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая вентильная матрица (FPGA) и т.п. как рабочая схема.
[0022]
Устройство 19 управления выполняет программы, хранящиеся в ПЗУ, с использованием ЦП, тем самым обеспечивая функцию сбора информации о движении для получения информации, касающейся состояния движения рассматриваемого транспортного средства, и функцию автономного управления движением для автономного управления скоростью движения и/или рулевого управления рассматриваемого транспортного средства. Функция получения информации о движении устройства 19 управления является функцией, используемой для получения информации о движении, касающейся состояния движения рассматриваемого транспортного средства. Например, устройство 19 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении информацию внешнего изображения вокруг транспортного средства, снятую передней камерой, задней камерой и боковыми камерами, включенными в датчики 11. Дополнительно или альтернативно, устройство 19 управления использует функцию сбора информации о путешествии, чтобы получать в качестве информации о движении результаты обнаружения передним радаром, задним радаром и боковыми радарами, включенными в датчики 11. Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию получения информации движения, чтобы получать в качестве информации движения информацию о скорости транспортного средства собственно рассматриваемого транспортного средства, определенную датчиком скорости транспортного средства, включенным в число датчиков 11, и/или информацию изображения лица водителя, захваченную бортовой камерой, включенной в число датчиков 11.
[0023]
Дополнительно или альтернативно, устройство 19 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении текущую информацию о местоположении рассматриваемого транспортного средства от устройства 12 определения местоположения рассматриваемого транспортного средства. Дополнительно или альтернативно, устройство 19 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении установленный пункт назначения и маршрут к пункту назначения от навигационного устройства 15. Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию сбора информации о движении, чтобы получать в качестве информации о движении информацию о местоположении криволинейных дорог и размер кривой (например, кривизну или радиус кривизны), точки слияния, точки ветвления, точки пересечения дорог и т. Д. позиции, в которых количество полос уменьшается, и т. д. из картографической базы данных 13. Кроме того, устройство 19 управления использует функцию получения информации движения, чтобы получать в качестве информации движения информацию о работе с бортовым оборудованием 14, выполняемой водителем, от бортового оборудования 14.
[0024]
Функция автономного управления движением устройства 19 управления представляет собой функцию, используемую для автономного управления движением рассматриваемого транспортного средства без зависимости от действий водителя. Функция автономного управления движением устройства 19 управления включает в себя функцию автономного управления скоростью, используемую для автономного управления скоростью движения рассматриваемого транспортного средства, и функцию автономного управления рулевым управлением, используемую для автономного управления рулевым управлением рассматриваемого транспортного средства. Функция автономного управления скоростью и функция автономного управления рулевым управлением настоящего варианта осуществления будут описаны ниже.
[0025]
«Функция автономного управления скоростью»
Функция автономного управления скоростью - это функция, используемая при обнаружении предшествующего транспортного средства для движения, чтобы следовать за предшествующим транспортным средством при выполнении управления расстоянием между транспортными средствами, чтобы поддерживать расстояние между транспортными средствами в соответствии со скоростью транспортного средства с верхним пределом скорости транспортного средства, установленной водителем. С другой стороны, когда предшествующее транспортное средство не обнаружено, функция автономного управления скоростью используется для выполнения движения с постоянной скоростью при скорости транспортного средства, которая устанавливается водителем. Первое также называется управлением расстоянием между транспортными средствами, а второе - также регулированием постоянной скорости. Функция автономного управления скоростью может включать в себя функцию определения ограничения скорости движущейся дороги по дорожному знаку с использованием датчиков 11 или получения ограничения скорости из картографической информации в картографической базе данных 13, чтобы автоматически устанавливать ограничение скорости на установить скорость транспортного средства.
[0026]
Чтобы активировать функцию автономного управления скоростью, водитель сначала приводит в действие переключатель 172 возобновления/ускорения или переключатель 173 установки/движения накатом устройства 17 ввода, проиллюстрированного на фиг. 2 для ввода желаемой скорости движения. Например, когда переключатель 173 «установка/движение накатом» нажат во время движения рассматриваемого транспортного средства со скоростью 70 км/ч, текущая скорость движения устанавливается без каких-либо изменений, но если скорость, желаемая водителем, составляет 80 км/ч, возобновление Переключатель 172 ускорения/ускорения можно нажимать несколько раз для увеличения установленной скорости. Напротив, если скорость, желаемая водителем, составляет 60 км/ч, переключатель 173 установки/движения накатом можно нажимать множество раз для уменьшения установленной скорости. Расстояние между транспортными средствами, желаемое водителем, может быть выбрано, например, из множества этапов настроек, таких как короткое расстояние/среднее расстояние/большое расстояние, путем приведения в действие переключателя 175 регулировки расстояния между транспортными средствами устройства 17 ввода, проиллюстрированного на ФИГ. 2.
[0027]
Управление постоянной скоростью выполняется, когда передний радар или тому подобное из датчиков 11 не обнаруживает никакого предшествующего транспортного средства впереди рассматриваемого транспортного средства на его полосе движения. При управлении с постоянной скоростью устройство 18 управления движением управляет работой приводного механизма, такого как двигатель и тормоз, одновременно возвращая данные скорости транспортного средства, полученные датчиком скорости транспортного средства, чтобы поддерживать заданную скорость движения.
[0028]
Управление расстоянием между транспортными средствами выполняется, когда передний радар или тому подобное из датчиков 11 обнаруживает предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения. При управлении расстоянием между транспортными средствами устройство 18 управления движением управляет работой механизма привода, такого как двигатель и тормоз, одновременно возвращая данные о расстоянии между транспортными средствами, обнаруженные передним радаром, чтобы поддерживать установленное расстояние между транспортными средствами. расстояние с верхним пределом скорости транспортного средства, устанавливаемым водителем. Если предшествующее транспортное средство останавливается во время движения рассматриваемого транспортного средства под управлением расстояния между транспортными средствами, рассматриваемое транспортное средство также прекращает следовать за предшествующим транспортным средством. Дополнительно или альтернативно, если предшествующее транспортное средство запускается в течение 30 секунд после остановки рассматриваемого транспортного средства, рассматриваемое транспортное средство также начинает движение, чтобы снова следовать за предшествующим транспортным средством посредством управления расстоянием между транспортными средствами. Если рассматриваемое транспортное средство останавливается более чем на 30 секунд, данное транспортное средство не запускается автоматически или автономно, даже когда предшествующее транспортное средство запускается, и после того, как предшествующее транспортное средство стартует, рассматриваемое транспортное средство начинает движение, чтобы снова следовать за предшествующим транспортным средством с помощью управление расстоянием между транспортными средствами, когда нажат переключатель 172 возобновления/ускорения или педаль акселератора.
[0029]
«Функция автономного управления рулевым управлением»
Функция автономного управления рулевым управлением - это функция, используемая, когда предварительно определенное условие удовлетворяется во время выполнения вышеописанной функции автономного управления скоростью, для управления работой исполнительного механизма рулевого управления, тем самым выполняя управление рулевым управлением рассматриваемого транспортного средства. Эта функция автономного управления рулевым управлением включает, например, функцию удержания полосы движения, функцию помощи при смене полосы движения, функцию помощи при обгоне, функцию помощи при движении по маршруту и другие функции. Функция удержания полосы движения - это функция, используемая для управления исполнительным механизмом рулевого управления таким образом, чтобы он перемещался ближе к центру полосы движения, например, чтобы помочь водителю в управлении автомобилем. Функция удержания полосы движения также упоминается как функция поддержания ширины полосы движения или тому подобное.
[0030]
«Функция помощи при смене полосы движения»
Функция помощи при смене полосы движения служит для включения указателей поворота, когда водитель управляет рычагом указателя поворота, как показано на фиг. 3, и также служит для запуска выполнения смены полосы движения (далее сокращенно LCP), которое представляет собой серию процессов для автоматической или автономной смены полосы движения, когда удовлетворяется предварительно установленное условие начала смены полосы движения. Функция помощи при смене полосы движения используется для определения того, удовлетворяется или нет условие начала смены полосы движения, на основе различных элементов информации о движении, полученных с использованием функции получения информации о движении. Примеры условия начала смены полосы движения включают, помимо прочего, условие, при котором выполняются все следующие условия:
- Режим удержания полосы движения осуществляется в ручном режиме;
- Сделано определение ручного режима;
- Транспортное средство движется со скоростью 60 км/ч и более;
- Есть полоса движения в сторону смены полосы движения;
-Полоса движения в качестве места назначения смены полосы движения включает в себя пространство, на которое возможна смена полосы движения;
-Тип маркеров полосы движения указывает на то, что смена полосы движения разрешена;
-Радиус кривизны дороги 250 м и более; и
- Время, прошедшее после нажатия водителем на рычаг указателя поворота, не превышает одной секунды.
[0031]
Режим удержания полосы движения в ручном режиме, который будет подробно описан ниже, относится к состоянию, в котором выполняются функция автономного управления скоростью и функция удержания полосы движения функции автономного управления рулевым управлением и удержание рулевого управления. колесо водителем обнаружено. Определение в ручном режиме относится к состоянию, в котором водитель продолжает держать руль.
[0032]
Функция помощи при смене полосы движения используется для запуска LCP, когда выполняется условие начала смены полосы движения. LCP включает в себя боковое движение рассматриваемого транспортного средства к соседней полосе движения и маневр смены полосы движения (далее сокращенно LCM) для фактического перехода на соседнюю полосу движения. Во время выполнения LCP функция помощи при смене полосы движения служит для управления устройством 16 представления, чтобы предоставить водителю информацию, указывающую, что смена полосы движения выполняется автоматически или автономно, а также служит для привлечения внимания к окружающей среде. По завершении LCM функция помощи при смене полосы движения используется для выключения указателей поворота и запуска функции удержания полосы движения на соседней полосе.
[0033]
«Функция помощи при обгоне»
Функция помощи при обгоне используется для управления устройством 16 представления, чтобы предоставить водителю информацию об обгоне, когда предшествующее транспортное средство, более медленное, чем рассматриваемое транспортное средство, находится впереди рассматриваемого транспортного средства на своей полосе движения, как проиллюстрировано на фиг. 4, и предварительно заданное условие предложения обгона, которое предварительно установлено, удовлетворяется. В данном случае информация об обгоне относится к информации, предлагающей водителю обгонять предшествующее транспортное средство. Функция помощи при обгоне служит для запуска вышеописанной LCP, когда водитель приводит в действие переключатель 176 помощи при смене полосы движения устройства 17 ввода для одобрения (соответствующего вводу одобрения) в ответ на представление информации об обгоне и условия начала обгона. то, что предварительно установлено, удовлетворяется. Функция помощи при обгоне служит для определения на основе различных элементов информации о движении, полученных с использованием функции получения информации о движении, удовлетворяются ли условие предложения обгона и условие начала обгона.
[0034]
Примеры условия предложения об обгоне включают в себя, помимо прочего, условие, при котором выполняются все следующие условия:
-Режим удержания полосы движения осуществляется в режиме без участия водителя;
- Транспортное средство движется со скоростью 60 км/ч и более;
- Есть полоса движения в сторону смены полосы движения;
- Полоса движения в качестве места назначения смены полосы движения включает в себя пространство, на которое смена полосы движения возможна через 5 секунд;
-Тип маркеров полосы движения указывает на то, что смена полосы движения разрешена;
-Радиус кривизны дороги 250 м и более;
-Скорость рассматриваемого транспортного средства ниже установленной на 5 км/ч и более;
-Скорость предшествующего транспортного средства меньше установленной на 10 км/или более;
-Расстояние между рассматриваемым транспортным средством и предшествующим транспортным средством меньше порогового значения, которое предварительно устанавливается на основе разницы скоростей между рассматриваемым транспортным средством и предшествующим транспортным средством; и
-Скорость предшествующего транспортного средства, находящегося на полосе движения в качестве пункта назначения смены полосы движения, удовлетворяет заданному условию.
[0035]
Режим удержания полосы движения в режиме без участия водителя, который будет подробно описан ниже, относится к режиму, в котором выполняются функция автономного управления скоростью и функция удержания полосы движения функции автономного управления рулевым управлением, а также удержание рулевого управления. руль водителем не нужен. Условие, что скорость предшествующего транспортного средства, присутствующего на полосе движения в качестве пункта назначения смены полосы движения, удовлетворяет заданному условию, применяется по-разному в зависимости от типа полосы движения в качестве пункта назначения смены полосы движения. Например, при смене полосы движения с левой полосы на правую на многополосной дороге с левосторонним движением условие состоит в том, что скорость рассматриваемого транспортного средства, находящегося на левой полосе движения, выше, чем скорость предшествующего транспортного средства, находящегося в правой полосе движения, примерно на 5 км/ч. Напротив, при смене полосы движения с правой полосы на левую на многополосной дороге с левосторонним движением условие состоит в том, что разница в скорости между рассматриваемым транспортным средством и предшествующим транспортным средством в левом - переулок в пределах 5 км/ч. Условия, касающиеся относительной разницы скоростей между рассматриваемым транспортным средством и предшествующим транспортным средством, меняются на обратные на дороге с правосторонним движением.
[0036]
Функция помощи при обгоне служит для включения указателей поворота для запуска LCP, когда водитель принимает (одобряет) представление информации об обгоне и предварительно заданное условие начала обгона удовлетворяется. Примеры условия начала обгона включают, помимо прочего, условие, при котором выполняются все следующие условия:
-Режим удержания полосы движения осуществляется в ручном режиме;
- Сделано определение в ручном режиме;
- Транспортное средство движется со скоростью 60 км/ч и более;
- Есть полоса движения в сторону смены полосы движения;
-Полоса движения в качестве места назначения смены полосы движения включает в себя пространство, на которое возможна смена полосы движения;
-Тип маркеров полосы движения указывает на то, что смена полосы движения разрешена;
-Радиус кривизны дороги 250 м и более;
-Скорость рассматриваемого транспортного средства ниже установленной на 5 км/ч и более (при смене полосы движения на правую полосу в левостороннем движении);
-Скорость предшествующего транспортного средства ниже установленной на 10 км/или более (при смене полосы движения на правую полосу в левостороннем движении);
-Скорость предшествующего транспортного средства, находящегося на полосе движения в качестве пункта назначения смены полосы движения, удовлетворяет заданному условию; а также
- Время, прошедшее после срабатывания переключателя 176 ассистента смены полосы движения, не превышает 10 секунд.
[0037]
Условие, что скорость предшествующего транспортного средства ниже установленной скорости на 10 км/или более, может быть изменено настройками водителя, а установленная скорость после изменения представляет собой условие начала обгона. В качестве скорости, которую можно изменить, можно выбрать, например, 15 км/ч и 20 км/в дополнение к 10 км/ч. Условие, при котором скорость предшествующего транспортного средства, находящегося на полосе движения в качестве пункта назначения смены полосы движения, удовлетворяет заданному условию, является таким же, как и в вышеописанном условии предложения обгона.
[0038]
Функция помощи при обгоне служит для запуска LCP, когда выполняется условие начала обгона, а также для выполнения бокового движения к соседней полосе движения и LCM. Во время выполнения LCP функция помощи при обгоне служит для управления устройством 16 представления, чтобы предоставить водителю информацию, указывающую, что смена полосы движения выполняется автоматически или автономно, а также служит для привлечения внимания к окружающей среде. По завершении LCM функция помощи при обгоне используется для выключения указателей поворота и запуска функции удержания полосы движения на соседней полосе. Когда условие предложения обгона снова удовлетворяется после обгона предшествующего транспортного средства, функция помощи при обгоне используется для управления устройством 16 представления, чтобы предложить водителю вернуться на исходную полосу движения. Когда водитель принимает это предложение, приводя в действие переключатель 176 помощи при смене полосы движения устройства 17 ввода и условие начала обгона удовлетворяется, функция помощи при обгоне служит для запуска LCP, так что рассматриваемое транспортное средство возвращается на исходную полосу движения.
[0039]
«Функция помощи при путешествии по маршруту»
Функция помощи при движении по маршруту служит для управления устройством 16 представления для представления информации о движении по маршруту, когда есть точка изменения направления движения, такая как точка ответвления, точка слияния, выезд или взимания платы за проезд на заданном маршруте, расстояние до точка изменения направления движения находится в пределах заранее определенного расстояния, и условие предложения заранее определенного маршрута удовлетворяется, а также служит для предложения смены полосы движения в точке изменения направления движения. Кроме того, функция помощи при движении по маршруту служит для запуска LCP, когда предложение о смене полосы движения принимается посредством работы переключателя 176 помощи при смене полосы движения и удовлетворяется заданное условие начала движения по маршруту. Функция помощи при движении по маршруту используется для определения на основе различных элементов информации о движении, полученных с использованием функции сбора информации о движении, удовлетворяются ли условие предложения движения по маршруту и условие начала движения по маршруту.
[0040]
Когда маршрут задан навигационным устройством 15, но функция помощи при движении по маршруту не выполняется или отключена в настройке, навигационное устройство 15 выполняет обычную функцию навигации, которая служит для направления маршрута.
[0041]
ФИГ. 6 иллюстрирует пример, в котором при движении по правой полосе движения по дороге с левосторонним движением с тремя полосами движения с каждой стороны рассматриваемое транспортное средство последовательно дважды меняет полосу движения в направлении точки ответвления, существующей на левой полосе движения, и движется от точки ответвления на дорогу с ответвлением, идущую по левой стороне левой полосы. Когда местоположение находится в пределах первого заранее заданного расстояния до точки ответвления (например, примерно от 2,5 км до 1,0 км до точки ответвления) и выполняется условие предложения движения по маршруту, функция помощи при движении по маршруту служит для предложения смены полосы движения справа -боковая полоса к центральной полосе на основе информации о маршруте движения. Первое заданное расстояние (также называемое разделом предложения смены полосы движения) предварительно устанавливается в соответствии с количеством смен полосы движения, необходимых для перехода к полосе движения, на которой присутствует точка изменения направления движения. Например, как показано на фиг. 6, когда необходимо дважды сменить полосу движения с правой полосы на левую через центральную полосу, участок от 2,5 км до 1,0 км до точки ответвления представляет собой первое заданное расстояние (раздел предложения по смене полосы движения). .
[0042]
Примеры условия предложения движения по маршруту включают в себя, помимо прочего, условие, при котором выполняются все следующие условия:
-Пункт назначения устанавливается навигатором 15;
-Режим удержания полосы движения осуществляется в режиме без участия водителя;
- Транспортное средство движется со скоростью 60 км/ч и более;
- Есть полоса движения в сторону смены полосы движения;
-Тип маркеров полосы движения указывает на то, что смена полосы движения разрешена; а также
-Радиус кривизны дороги 250 м и более.
В условии предложения движения по маршруту, даже если полоса движения в качестве пункта назначения смены полосы движения не включает пространство, на которое возможна смена полосы, информация о движении по маршруту представляется, чтобы уведомить водителя о необходимости смены полосы движения вдоль маршрута.
[0043]
Функция помощи при движении по маршруту служит для включения указателей поворота для запуска LCP, когда водитель одобряет смену полосы движения для движения к точке ответвления и выполняется условие начала движения по маршруту. Примеры условия начала движения по маршруту включают, помимо прочего, условие, при котором выполняются все следующие условия:
-Режим удержания полосы движения осуществляется в ручном режиме;
- Сделано определение ручного режима;
- Транспортное средство движется со скоростью 60 км/ч и более;
- Есть полоса движения в сторону смены полосы движения;
-Полоса движения в качестве места назначения смены полосы движения включает в себя пространство, на которое возможна смена полосы движения;
-Тип маркеров полосы движения указывает на то, что смена полосы движения разрешена;
-Транспортное средство движется в разделе предложений по смене полосы движения; а также
-Радиус кривизны дороги не более 250 м.
[0044]
Функция помощи при движении по маршруту служит для запуска LCP, когда выполняется условие начала движения по маршруту, а также для выполнения бокового движения к центральной полосе движения и LCM. По завершении LCM функция помощи при движении по маршруту используется для выключения указателей поворота и запуска функции удержания полосы движения на центральной полосе. Во время выполнения LCP функция помощи при движении по маршруту служит для управления устройством 16 представления, чтобы предоставить водителю информацию, указывающую, что смена полосы движения выполняется автоматически или автономно, а также служит для привлечения внимания к окружающей среде.
[0045]
Как показано на фиг. 6, во время выполнения функции удержания полосы движения на центральной полосе движения, когда местоположение находится в пределах второго заданного расстояния до точки ответвления (например, примерно от 2,3 км до 700 м до точки ответвления) и условие начала движения по маршруту удовлетворяется, функция помощи при движении по маршруту используется для включения указателей поворота для запуска второй LCP и выполнения смены полосы движения с центральной полосы на левую. По завершении второго LCM функция помощи при движении по маршруту используется для выключения указателей поворота и запуска функции удержания полосы движения в левой полосе движения.
[0046]
Во время выполнения функции удержания полосы движения в левой полосе движения, когда местоположение находится в пределах третьего заданного расстояния до точки ответвления (например, примерно от 800 м до 150 м до точки ответвления) и условие начала движения по маршруту удовлетворяется, функция помощи при движении по маршруту служит для включения указателей поворота. Кроме того, функция помощи при движении по маршруту служит для запуска автономного управления рулевым управлением из точки за точкой ответвления на ответвленную дорогу и выполнения смены полосы движения с левой полосы на ответвленную дорогу. Когда смена полосы движения на дорогу с ответвлением завершена, функция помощи при движении по маршруту используется для выключения указателей поворота и запуска функции удержания полосы движения на дороге с ответвлением.
[0047]
ФИГ. 7 является блок-схемой, иллюстрирующей переход между состояниями каждой функции, установленной в устройстве 19 управления. Система, показанная на чертеже, означает автономную систему управления движением, реализованную устройством 19 управления. Когда главный переключатель 171 на фиг. 2 включается из состояния ВЫКЛ системы, показанного на рисунке, система переходит в состояние ожидания. Из этого состояния ожидания автономное управление скоростью активируется путем включения переключателя 173 установки/движения накатом или переключателя 172 возобновления/ускорения по фиг. 2. Это позволяет начать вышеописанное управление постоянной скоростью или управление расстоянием между транспортными средствами, и водитель может управлять рассматриваемым транспортным средством, просто управляя рулевым колесом, не нажимая на акселератор или тормоз.
[0048]
Во время выполнения автономного управления скоростью, когда условие (1) на фиг. 7 выполняется, режим переходит в режим удержания полосы движения режима автономного управления рулевым управлением/ручного режима. Примеры условия (1) включают, помимо прочего, условие, при котором выполняются все следующие условия:
-Обнаруживаются маркеры полосы движения с обеих сторон от рассматриваемого транспортного средства;
- Водитель держит руль;
- Транспортное средство движется по центру полосы движения;
-Не работают указатели поворотов;
- Стеклоочиститель не работает на высокой скорости (HI); а также
-При предоставлении высокоточной карты на расстоянии примерно 200 м впереди не будет дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается.
[0049]
Ручной режим относится к режиму, в котором автономное управление рулевым управлением не работает, если водитель не держит рулевое колесо, в то время как режим без участия водителя относится к режиму, в котором автономное управление рулевым управлением работает, даже когда водитель отпускает рулевое управление. колесо. Удержание руля водителем распознается сенсорным датчиком 11.
[0050]
Во время выполнения режима удержания полосы движения режима автономного управления рулевым управлением/ручного режима, когда условие (2) на фиг. 7 выполняется, режим переходит в режим удержания полосы движения режима автономного управления рулевым управлением/режима без участия водителя. Примеры условия (2) включают условие, при котором выполняются все следующие условия:
- Рассматриваемое транспортное средство движется по автомобильной дороге;
- Транспортное средство движется по дороге, конструктивно отделенной от встречной полосы;
- Транспортное средство движется по дороге, для которой подготовлена высокоточная карта;
-Транспортное средство движется со скоростью не выше установленной;
-Сигналы GPS эффективны;
- Водитель держит руль;
- Водитель смотрит вперед;
- На расстоянии примерно 800 м впереди нет дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается;
-Нет крутого поворота 100R или меньше в пределах 500 м впереди;
- Транспортное средство не проезжает по туннелю, превышающему 500 м от входа в туннель; а также
-Педаль акселератора не нажата.
Обращается ли водитель вперед или нет, определяется, например, на основе изображения, снятого камерой монитора водителя датчиков 11.
[0051]
Напротив, во время выполнения режима удержания полосы движения режима автономного управления рулевым управлением/режима без участия водителя, когда условие (3) на фиг. 7 выполняется, режим переходит в режим удержания полосы движения режима автономного управления рулевым управлением/ручного режима. Примеры условия (3) включают, помимо прочего, условие, при котором выполняется любое из следующих условий:
- Рассматриваемое транспортное средство движется по дороге, отличной от автомобильной;
-Транспортное средство движется по участку с двусторонним движением;
- Транспортное средство движется по дороге, для которой не подготовлена высокоточная карта;
- Транспортное средство движется со скоростью выше установленной;
-Сигналы GPS больше не принимаются;
- Водитель не поворачивается вперед в течение 5 секунд после срабатывания сигнализации прямого взгляда;
-Камера монитора водителя больше не может обнаружить водителя;
-Есть любой из дорожных ворот, съезда, точки слияния, перекрестка или точки, в которой количество полос уменьшается, в пределах примерно 800 м впереди;
- При движении со скоростью менее 40 км/ч впереди на расстоянии около 200 м имеется крутой поворот 100R или менее;
- При движении со скоростью около 40 км/ч и более в пределах 200 м впереди имеется резкий поворот 170R или менее;
- Транспортное средство движется по туннелю, превышающему 500 м от входа в туннель;
- Водитель нажимает на педаль акселератора, удерживая руль; а также
-При приближении работает сигнализация.
[0052]
Во время выполнения режима удержания полосы движения режима автономного управления рулевым управлением/режима без участия водителя, когда условие (4) на фиг. 7 удовлетворяется, автономное управление рулевым управлением прекращается и переходит в автономное управление скоростью. Примеры условия (4) включают, но не ограничиваются этим, условие, при котором выполняется любое из следующих условий:
- Маркеры полосы движения по обе стороны от транспортного средства больше не обнаруживаются в течение определенного периода времени;
- Водитель управляет рулем; а также
- Стеклоочиститель работает на высокой скорости (HI).
Работа водителя на рулевом колесе определяется путем определения крутящего момента, приложенного к рулевому колесу.
[0053]
Во время выполнения режима удержания полосы движения автономного режима рулевого управления/режима без участия водителя, когда условие (5) на фиг. 7, автономное управление рулевым управлением и автономное управление скоростью останавливаются и переходят в состояние ожидания. Примеры условия (5) включают, помимо прочего, условие, при котором выполняется любое из следующих условий:
- Водитель нажал на тормоз;
- Водитель задействовал переключатель 174 отмены на фиг. 2;
- Одна или несколько дверей транспортного средства открылись;
- Ремень безопасности водителя был отпущен;
- Датчик сиденья определил, что водителя больше нет на сиденье водителя;
- Рычаг выбора перешел в положение, отличное от «D» или «M»;
- Стояночный тормоз сработал;
- Отключена противоскользящая тормозная система транспортного средства;
-Сработала противоскользящая тормозная система;
-Включен снежный режим;
- сработал аварийный тормоз;
- Состояние остановки продолжается около 3 минут после остановки транспортного средства из-за контроля скорости транспортного средства;
- Фронтальная камера обнаружила плохую видимость, например невозможность правильно распознать объект из-за грязи, подсветки, дождя/тумана и т.п.;
- Передний радар обнаружил экранирование или радиопомехи;
- Передний радар обнаружил отклонение оси;
- Боковой радар обнаружил экранирование или радиопомехи; а также
- Боковой радар обнаружил отклонение оси.
[0054]
Во время выполнения режима автономного управления рулевым управлением/ручного режима, когда условие (6) на фиг. 7 удовлетворяется, автономное управление рулевым управлением прекращается и переходит в автономное управление скоростью. Примеры условия (6) включают, но не ограничиваются этим, условие, при котором выполняется любое из следующих условий:
- Маркеры полосы движения с обеих сторон объекта больше не обнаруживаются;
- Водитель управлял рулем;
- Водитель задействовал рычаг указателя поворота;
- Стеклоочиститель сработал на высокой скорости (HI).
- Транспортное средство прибыло на участок взимания платы за проезд, когда подготовлена высокоточная карта; а также
- Фронтальная камера обнаружила плохую видимость, например невозможность правильно распознать объект из-за грязи, подсветки, дождя/тумана и т.п.
[0055]
Во время выполнения режима автономного управления рулевым управлением/ручного режима, когда условие (7) на фиг. 7, автономное управление рулевым управлением и автономное управление скоростью останавливаются и переходят в состояние ожидания. Примеры условия (7) включают, помимо прочего, условие, при котором выполняется любое из следующих условий:
- Водитель нажал на тормоз;
- Водитель задействовал переключатель 174 отмены на фиг. 2;
-Одна или несколько дверей транспортного средства открылись;
-Ремень безопасности водителя был отпущен;
-Датчик сиденья определил, что водителя больше нет на сиденье водителя;
- Рычаг выбора перешел в положение, отличное от «D» или «M»;
- Стояночный тормоз сработал;
-Отключена противоскользящая тормозная система транспортного средства;
-Сработала противоскользящая тормозная система;
-Включен снежный режим;
- сработал аварийный тормоз;
-Состояние остановки продолжается около 3 минут после остановки транспортного средства из-за контроля скорости транспортного средства;
- Передний радар обнаружил экранирование или радиопомехи; а также
- Передний радар обнаружил отклонение оси.
[0056]
Во время выполнения автономного управления скоростью, когда условие (8) на фиг. 7 выполняется, управление переходит в состояние ожидания. Примеры условия (8) включают, помимо прочего, условие, при котором выполняется любое из следующих условий:
- Водитель нажал на тормоз;
- Водитель задействовал переключатель 174 отмены на фиг. 2;
-Одна или несколько дверей транспортного средства открылись;
-Ремень безопасности водителя был отпущен;
-Датчик сиденья определил, что водителя больше нет на сиденье водителя;
- Рычаг выбора перешел в положение, отличное от «D» или «M»;
- Стояночный тормоз сработал;
-Отключена противоскользящая тормозная система транспортного средства;
-Сработала противоскользящая тормозная система;
-Включен снежный режим;
- сработал аварийный тормоз;
-Состояние остановки продолжается около 3 минут после остановки транспортного средства из-за контроля скорости транспортного средства;
- Передний радар обнаружил экранирование или радиопомехи; а также
- Передний радар обнаружил отклонение оси.
[0057]
Во время выполнения режима удержания полосы движения режима автономного управления рулевым управлением/режима без участия водителя, когда условие (9) на фиг. 7 выполняется, режим переходит в режим смены полосы движения режима автономного управления рулевым управлением/ручного режима. Примеры условия (9) включают, но не ограничиваются этим, условие, при котором выполняется любое из следующих условий:
- Система предложила смену полосы движения на основе функции помощи при обгоне или функции помощи при движении по маршруту, и водитель задействовал переключатель 176 помощи при смене полосы движения; а также
- Водитель задействовал рычаг указателя поворота для выполнения функции помощи при смене полосы движения.
[0058]
Во время выполнения режима смены полосы движения режима автономного управления рулевым управлением/ручного режима, когда условие (10) на фиг. 7 выполняется, режим переходит в режим удержания полосы движения режима автономного управления рулевым управлением/ручного режима. Примеры условия (10) включают, но не ограничиваются этим, условие, при котором выполняется любое из следующих условий:
-Предельная скорость была превышена до начала LCP;
- Водитель нажал на педаль акселератора, удерживая руль до запуска LCP;
- LCP больше не может быть запущен в течение 10 секунд после нажатия переключателя 176 ассистента смены полосы движения во время предложения смены полосы движения, когда впереди идет медленно движущийся транспортное средство;
- LCP больше не запускается, и транспортное средство подошло слишком близко к точке ответвления после нажатия переключателя 176 помощи при смене полосы движения во время предложения смены полосы движения для движения по маршруту;
- LCM больше не может быть запущен в течение 5 секунд после срабатывания LCP;
-Скорость транспортного средства упала ниже 50 км/ч после запуска LCP и до запуска LCM;
- На соседней полосе больше нет места, необходимого для смены полосы движения после работы с LCP и перед запуском LCM;
-Водитель выполнил операцию отмены перед запуском LCM;
-Маркеры полосы больше не могут быть обнаружены до запуска LCM;
-Перед запуском LCM было определено, что нет соседней полосы в направлении смены полосы движения или что на определенном расстоянии впереди соседней полосы не будет;
- Перед запуском LCM было определено, что впереди на определенном расстоянии имеется кривая с радиусом кривизны 250 м или более;
- Перед запуском LCM было определено, что на определенном расстоянии впереди есть участок, на котором тип разметки полосы движения запрещает смену полосы движения на соседнюю полосу;
- Боковой радар обнаружил экранирование или радиопомехи перед запуском LCM;
- Боковой радар обнаружил отклонение оси перед запуском LCM;
-Сработала ручная сигнализация;
- водитель остановил указатели поворота; а также
- Доработана LCP.
[0059]
Ручной будильник срабатывает при выполнении любого из следующих условий:
- водитель не держит руль в течение примерно 2 секунд после срабатывания LCP;
- Водитель не удерживает рулевое колесо в течение примерно 2 секунд после нажатия переключателя 176 ассистента смены полосы движения во время предложения смены полосы движения, когда впереди идет медленно движущийся транспортное средство; а также
- Водитель не удерживает рулевое колесо в течение примерно 2 секунд после нажатия переключателя 176 ассистента смены полосы движения во время предложения смены полосы движения для движения по маршруту.
[0060]
Система выключается, когда главный переключатель 171 выключен в любом из режима автономного управления рулевым управлением/режима без участия водителя, автономного управления рулевым управлением/ручного режима, автономного управления скоростью и состояния ожидания.
[0061]
Затем будет описан процесс управления движением согласно настоящему варианту осуществления со ссылкой на фиг. 8. ФИГ. 8 - блок-схема, иллюстрирующая процесс управления движением согласно настоящему варианту осуществления. Устройство 19 управления выполняет процесс управления движением, который будет описан ниже, с заранее определенными интервалами времени. Следующее описание будет сделано при предположении, что устройство 19 управления использует функцию автономного управления движением для выполнения автономного управления скоростью и автономного управления рулевым управлением, а также использует функцию помощи при смене полосы движения, функцию помощи при обгоне и помощь при движении по маршруту, функцию для выполнения управления ассистентом смены полосы движения, управлением ассистентом обгона и управлением ассистентом движения по маршруту, соответственно.
[0062]
Сначала на этапе S1 по фиг. 8, выполняется определение того, включен ли главный переключатель 171 устройства 19 управления, и когда главный переключатель 171 выключен, этап S1 повторяется до тех пор, пока главный переключатель 171 не будет включен. Когда главный переключатель 171 включен, процесс переходит к этапу S2, на котором определяется, установлена ли скорость движения водителем. Если скорость движения не установлена, процесс возвращается к этапу S1, с которого этапы S1 и S2 повторяются до тех пор, пока скорость движения не будет установлена. Установка скорости движения выполняется водителем, приводящим в действие переключатель 172 возобновления/ускорения или переключатель 173 установки/движения накатом устройства 17 ввода, проиллюстрированного на фиг. 2 для ввода желаемой скорости движения.
[0063]
Когда скорость движения установлена, запускается автономное управление скоростью. На этапе S3 передний радар (датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения, и когда есть предшествующее транспортное средство. транспортного средства, процесс переходит к этапу S4, на котором выполняется управление расстоянием между транспортными средствами. Когда нет предшествующего транспортного средства, процесс переходит к этапу S5, на котором выполняется управление с постоянной скоростью. Это позволяет водителю вести рассматриваемое транспортное средство с желаемой скоростью, просто управляя рулевым колесом, не нажимая на акселератор или тормоз.
[0064]
Во время выполнения управления расстоянием между транспортными средствами на этапе S4 или управления постоянной скоростью на этапе S5 на этапе S6 выполняется определение того, выполняется ли вышеописанное условие (1) для перехода в режим удержания полосы движения режим автономного управления рулевым управлением/ручной режим устраивает. Когда условие (1) удовлетворяется, процесс переходит к этапу S7, а когда условие (1) не удовлетворяется, процесс возвращается к этапу S3.
[0065]
На этапе S7 передний радар (из датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для обнаружения того, есть ли предшествующее транспортное средство впереди рассматриваемого транспортного средства на его полосе движения. Когда имеется предшествующее транспортное средство, процесс переходит к этапу S8, на котором выполняется режим управления расстоянием между транспортными средствами/удержания полосы движения. Когда нет предшествующего транспортного средства, процесс переходит к этапу S9, на котором выполняется режим управления с постоянной скоростью/удержания полосы движения.
[0066]
Во время выполнения режима управления расстоянием между транспортными средствами/удержания полосы движения на этапе S8 или режима управления с постоянной скоростью/удержания полосы движения на этапе S9 на последующем этапе S10 выполняется определение того, является ли вышеописанное условие (2) для перехода в режим автономного управления рулевым управлением/режим без участия водителя удовлетворительным. Когда условие (2) удовлетворяется, процесс переходит к этапу S11, а когда условие (2) не удовлетворяется, процесс возвращается к этапу S3. На этапе S11, на котором выполняется условие (2) перехода в режим автономного управления рулевым управлением/режим без участия водителя, передний радар (из датчиков 11), который обнаруживает препятствие впереди рассматриваемого транспортного средства, используется для определения того, действительно ли впереди рассматриваемого транспортного средства на его полосе движения идет предшествующее транспортное средство. Когда есть предшествующее транспортное средство, процесс переходит к этапу S12, на котором выполняется управление расстоянием между транспортными средствами/режим удержания полосы движения/режим без участия водителя. Когда нет предшествующего транспортного средства, процесс переходит к этапу S13, на котором выполняется управление с постоянной скоростью/режим удержания полосы движения/режим без участия водителя.
[0067]
На этапе S14 определяется, был ли задействован водителем рычаг указателя поворота. Когда рычаг указателя поворота приведен в действие, условие (9) перехода в режим смены полосы движения режима автономного управления рулевым управлением/ручного режима удовлетворяется, и процесс переходит к этапу S15. На этапе S15 выполняется управление помощи при смене полосы движения. Когда управление помощью при смене полосы движения на этапе S15 завершается, процесс возвращается к этапу S3. Когда рычаг указателя поворота не использовался водителем на этапе S14, процесс переходит к этапу S16.
[0068]
На этапе S16 определяется, есть ли у предшествующего транспортного средства более медленную, чем установленная скорость. Когда скорость предшествующего транспортного средства ниже установленной, выполняется определение того, удовлетворяется ли условие (9), а когда выполняется условие (9), режим переходит в режим смены полосы движения режима автономного управления рулевым управлением/ручного режима, и процесс переходит к этапу S17. На этапе S17 выполняется управление помощи при обгоне. Когда управление помощью для помощи при обгоне на этапе S17 завершается, процесс возвращается к этапу S3. Когда нет предшествующего транспортного средства, скорость которого ниже установленной на этапе S16, процесс переходит к этапу S18.
[0069]
На этапе S18 определяется, установлен ли маршрут к пункту назначения в навигационном устройстве 15. Если маршрут не установлен, процесс возвращается к этапу S1. Когда маршрут к пункту назначения установлен в навигационном устройстве 15 на этапе S18, процесс переходит к этапу S19. На этапе S19 определяется, достигнуто ли предварительно определенное расстояние до точки изменения направления движения, такой как точка ответвления, существующая на маршруте. Когда предварительно определенное расстояние до точки изменения направления движения достигается на этапе S19, выполняется определение того, удовлетворяется ли условие (9), и когда условие (9) удовлетворяется, режим переходит на смену полосы движения режима автономного управления рулевым управлением/ручного режима, и процесс переходит к этапу S20. На этапе S20 выполняется управление помощью при движении по маршруту. Когда управление помощью при движении по маршруту на этапе S20 завершается, процесс возвращается к этапу S3. Когда предварительно определенное расстояние до точки изменения направления движения не достигается на этапе S19, процесс возвращается к этапу S1.
[0070]
В блок-схеме фиг. 8, необходимость управления помощью при смене полосы движения, управлении помощью при обгоне и управлении помощью при движении по маршруту определяется в этом порядке, но на практике необходимость этих процедур управления определяется параллельно, и когда, во время любого из выполняются процедуры управления помощью, становится необходимым выполнить другую процедуру управления помощью, необходимость выполнения решается между процедурами управления помощью, и определяется управление помощью, которое должно выполняться предпочтительно.
[0071]
Затем описание будет направлено к первому варианту осуществления для решения проблемы, которая может возникнуть при основной обработке управления движением, описанной в блок-схеме на фиг. 8. В управлении помощью при движении по маршруту процесса управления движением, описанном в блок-схеме на фиг. 8, например, когда рычаг указателя поворота приводится в действие водителем для выполнения функции помощи при смене полосы движения после того, как информация об обгоне представлена с использованием функции помощи при обгоне, неясно, какая функция помощи используется для выполнения смены полосы движения. Вдобавок, когда рычаг указателя поворота приводится в действие водителем для выполнения функции помощи при смене полосы движения после ввода одобрения водителя в отношении информации об обгоне, неясно, какая функция помощи используется для выполнения смены полосы движения. Таким образом, когда функция помощи при обгоне и функция помощи при смене полосы движения выполняются одновременно и неясно, какая функция используется для выполнения смены полосы движения, намерение водителя сменить полосу движения не отражается должным образом.
[0072]
В настоящем варианте осуществления, чтобы предотвратить возникновение вышеописанной проблемы, управление, как в блок-схеме, показанной на фиг. 9 выполняется. Когда информация об обгоне представлена с использованием функции помощи при обгоне на этапе S30 и рычаг указателя поворота приводится в действие на этапе S32 без ввода одобрения, как для информации об обгоне на этапе S31, смена полосы движения выполняется с использованием функции помощи при смене полосы движения на этапе S33. Благодаря этой операции намерение водителя сменить полосу движения становится приоритетным.
[0073]
Когда рычаг указателя поворота приводится в действие на этапе S35 после того, как ввод одобрения для информации об обгоне выполняется на этапе S31, и до того, как условие начала обгона удовлетворяется на этапе S34, процесс переходит к этапу S36. На этапе S36 определяется, совпадают ли направление смены полосы движения в информации об обгоне и направление работы рычага указателя поворота. Когда направление смены полосы движения в информации об обгоне и направление работы рычага указателя поворота совпадают, процесс переходит к этапу S37, на котором смена полосы движения выполняется с использованием функции помощи при смене полосы движения вместо смены полосы движения с использованием функция помощи при обгоне. Это позволяет расставить приоритеты в намерениях водителя. В этом случае намерение водителя сменить полосу движения является приоритетным, и на этапе S39 информация о смене полосы движения для возврата с полосы движения в качестве пункта назначения смены полосы движения на исходную полосу движения не представляется.
[0074]
Напротив, когда направление смены полосы движения в информации об обгоне и направление работы рычага указателя поворота не совпадают на этапе S36, определяется, что ввод одобрения был отменен, и на этапе S38 смена полосы движения использование функции помощи при обгоне остановлено.
[0075]
Когда рычаг указателя поворота не приводится в действие на этапе S35 и после срабатывания переключателя помощи при смене полосы движения на этапе S40 истекает заданное время, смена полосы движения с использованием функции помощи при обгоне останавливается на этапе S38. Это заранее определенное время может быть заранее определенным пороговым значением или может быть изменено иначе, например, в зависимости от причины, по которой выполняется функция помощи при обгоне. Например, при обгоне предшествующего транспортного средства из-за низкой скорости предшествующего транспортного средства заданное время устанавливается равным примерно 10 секундам, а когда требуется смена полосы движения для продолжения движения по маршруту с использованием функции помощи при движении по маршруту, предварительно определенное время составляет около 2 минут 30 секунд или тому подобное.
[0076]
Как описано выше, согласно устройству 1 управления движением и способу управления движением для транспортного средства настоящего варианта осуществления предусмотрены режим запуска системы и режим запуска водителя. В режиме системного запуска, когда предварительно определенное условие для выполнения смены полосы движения удовлетворяется, водителю предоставляется информация о смене полосы движения относительно того, одобрять ли выполнение функции автоматической смены полосы движения для транспортного средства, чтобы выполнить смену полосы движения автономным управлением движением, и когда в ответ на представление информации о смене полосы движения обнаруживается ввод одобрения водителем на одобрение выполнения функции автоматической смены полосы движения, выполняется функция автоматической смены полосы движения. В режиме запуска водителя, когда водитель выполняет операцию инструктирования смены полосы движения, отличную от ввода одобрения, выполняется функция автоматической смены полосы движения. Когда операция инструктирования смены полосы движения выполняется водителем после представления информации о смене полосы движения, выполняется функция автоматической смены полосы движения в режиме запуска водителя. Благодаря этой операции, даже когда есть предложение о смене полосы движения в режиме запуска системы, намерение водителя сменить полосу движения имеет приоритет, и может выполняться функция автоматической смены полосы движения в режиме запуска водителя.
[0077]
Согласно другому аспекту также предусмотрены режим запуска системы и режим запуска водителя. В режиме системного запуска, когда предварительно определенное условие для выполнения смены полосы движения удовлетворяется, водителю предоставляется информация о смене полосы движения относительно того, одобрять ли выполнение функции автоматической смены полосы движения для транспортного средства, чтобы выполнить смену полосы движения автономным управлением движением, и когда в ответ на представление информации о смене полосы движения обнаруживается ввод одобрения водителем на одобрение выполнения автоматической смены полосы движения, выполняется функция автоматической смены полосы движения. В режиме запуска водителя, когда водитель выполняет заранее определенную операцию инструктирования смены полосы движения, отличную от ввода приема, выполняется функция автоматической смены полосы движения. В случае, когда операция инструктирования смены полосы движения выполняется после ввода одобрения водителя, когда направление смены полосы движения, представленное информацией о смене полосы движения, и направление смены полосы движения, указанное операцией инструктирования смены полосы движения, являются идентичными направлениями, автоматическая смена полосы движения Функция в режиме запуска водителя выполняется вместо функции автоматической смены полосы движения в режиме запуска системы. С другой стороны, когда направление смены полосы движения, представленное информацией о смене полосы движения, и направление смены полосы движения, указанное операцией инструктирования смены полосы движения, являются противоположными направлениями, ввод одобрения отменяется. Благодаря этой операции, даже когда водитель одобряет предложение о смене полосы движения в режиме запуска системы, намерение водителя сменить полосу движения имеет приоритет, и может выполняться функция автоматической смены полосы движения в режиме запуска водителя.
[0078]
Когда функция автоматической смены полосы движения в режиме запуска водителя выполняется вместо функции автоматической смены полосы движения в режиме запуска системы, представление информации о смене полосы движения для возврата на исходную полосу движения с полосы в качестве пункта назначения смены полосы движения не может, и поэтому намерение водителя сменить полосу движения может иметь приоритет, чтобы продолжить движение по полосе в качестве пункта назначения для смены полосы движения.
[0079]
Кроме того, операционный блок, которым можно управлять, когда водитель держит рулевое колесо, может использоваться для ввода одобрения, а рычаг указателя поворота может использоваться для операции указания смены полосы движения; следовательно, операция возможна при четком разделении одобрения режима запуска системы и смены полосы движения на основе намерения водителя, и можно предотвратить возникновение ошибочной операции.
[Описание позиционных обозначений]
[0080]
1 Устройство управления движением
11 Датчики
12 Устройство определения местоположения рассматриваемого транспортного средства
13 Картографическая база данных
14 Бортовое оборудование
15 Навигационное устройство
16 Устройство представления
17 Устройство ввода
171 Главный переключатель
172 Переключатель возобновления/ускорения
173 Переключатель установки/движения накатом
174 Переключатель отмены
175 Переключатель управления расстоянием между транспортными средствами
176 Переключатель помощи при смене полосы движения
177 Экран дисплея
178 Кнопка ВКЛ.
179 Кнопка ВЫКЛ.
17 Устройство управления вождением
18 Устройство управления

Изобретение относится к способу управления движением. Предлагается способ управления движением для транспортного средства, имеющего режим запуска системы и режим запуска водителя. Режим запуска системы содержит определение того, удовлетворяется ли условие начала для функции автоматической смены полосы движения, когда условие начала удовлетворено, представление информации о смене полосы движения относительно того, выполнять ли смену полосы движения или нет, и когда в ответ на представление информации о смене полосы движения обнаруживается ввод приема согласия на выполнение смены полосы движения, предложенной в информации о смене полосы движения. Режим запуска водителя содержит определение того, выполняется ли водителем операция инструкции смены полосы движения, отличная от ввода приема, и при обнаружении того, что выполняется операция инструкции смены полосы движения, использование функции автоматической смены полосы движения для выполнения смены полосы движения по инструкции операции смены полосы движения. При этом, когда действие инструкции смены полосы движения водителем обнаруживается после того, как информация о смене полосы движения представлена в режиме запуска системы, режим запуска водителя используется для выполнения инструкции смены полосы движения. Достигается своевременная смена полосы движения. 3 н. и 2 з.п. ф-лы, 9 ил.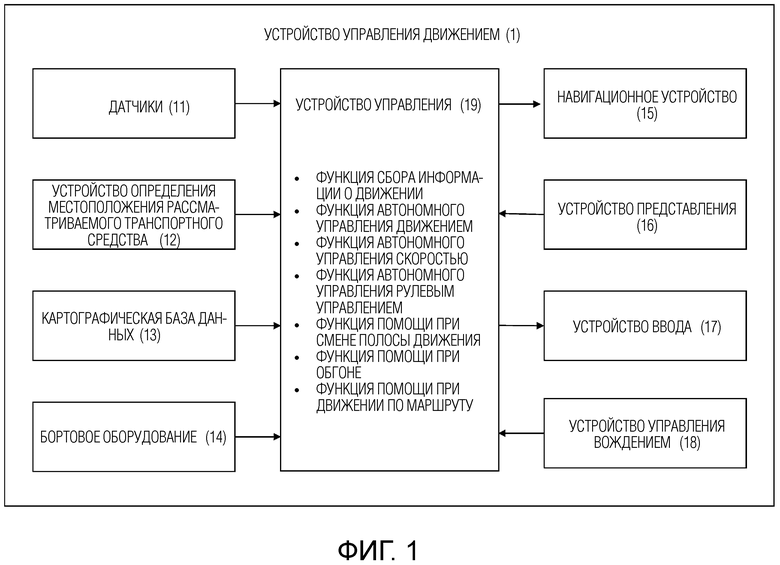
1. Способ управления движением для транспортного средства, имеющего режим запуска функции автоматической смены полосы движения и запускаемый водителем режим функции автоматической смены полосы движения, причем упомянутый режим запуска представляет собой режим, в котором смена полосы движения, предложенная из системы автономного управления движением транспортного средства, выполняется посредством автономного управления движением с использованием автоматической функции изменения полосы движения, причем упомянутый запускаемый водителем режим представляет собой режим, в котором смена полосы движения, предписываемая водителем транспортного средства, выполняется с использованием функции автоматической смены полосы движения,
режим запуска, содержащий:
определение того, удовлетворяется ли условие начала для функции автоматической смены полосы движения;
когда условие начала удовлетворено, представление информации о смене полосы движения относительно того, выполнять ли смену полосы движения или нет; и
когда в ответ на представление информации о смене полосы движения обнаруживается ввод одобрения для одобрения выполнения смены полосы движения, использование функции автоматической смены полосы движения для выполнения смены полосы движения, предложенной в информации о смене полосы движения,
запускаемый водителем режим, содержащий:
определение того, выполняется ли водителем операция инструктирования смены полосы движения, отличная от ввода одобрения; и
при обнаружении того, что выполняется операция инструктирования смены полосы движения, использование функции автоматической смены полосы движения для выполнения смены полосы движения, предписываемой операцией инструктирования смены полосы движения,
при этом, когда операция инструктирования смены полосы движения водителем обнаруживается после того, как информация о смене полосы движения представлена в режиме запуска, запускаемый водителем режим используется для выполнения смены полосы движения, предписываемой операцией инструктирования смены полосы движения.
2. Способ управления движением транспортного средства, содержащий:
обеспечение режима запуска функции автоматической смены полосы движения и запускаемого водителем режима функции автоматической смены полосы движения,
упомянутый режим запуска, включающий в себя, когда выполняется условие начала для функции автоматической смены полосы движения для выполнения смены полосы движения транспортного средства посредством автономного управления движением, представление информации о смене полосы движения относительно того, одобрять ли выполнение функции автоматической смены полосы движения, и когда ввод одобрения для одобрения выполнения функции автоматической смены полосы движения обнаруживается в ответ на представление информации о смене полосы движения, выполнение функции автоматической смены полосы движения,
упомянутый запускаемый водителем режим, включающий в себя выполнение функции автоматической смены полосы движения, когда выполняется заранее заданная операция инструктирования смены полосы движения, отличная от ввода одобрения;
когда операция инструктирования смены полосы движения выполняется после ввода одобрения, определение того, являются ли направление смены полосы движения, представленное информацией о смене полосы движения, и направление смены полосы движения, предписываемое операцией инструктирования смены полосы движения, идентичным направлением;
когда направление смены полосы движения, представленное информацией о смене полосы движения, и направление смены полосы движения, предписываемое операцией инструктирования смены полосы движения, являются идентичным направлением, выполнение функции автоматической смены полосы движения с помощью запускаемого водителем режима вместо функции автоматической смены полосы движения системой с помощью режима запуска; и
когда направление смены полосы движения, представленное информацией о смене полосы движения, и направление смены полосы движения, предписываемое операцией инструктирования смены полосы движения, являются противоположными направлениями, отмену ввода одобрения.
3. Способ управления движением для транспортного средства по п. 2, в котором функция автоматической смены полосы движения с помощью режима запуска включает в себя функцию помощи при обгоне, заключающуюся в обгоне предшествующего транспортного средства, которое медленнее, чем транспортное средство, и когда функция автоматической смены полосы движения с помощью запускаемого водителем режима выполняется вместо функции автоматической смены полосы движения в режиме запуска, представление информации о смене полосы движения для возврата на исходную полосу движения с полосы движения в качестве пункта назначения смены полосы движения не выполняется.
4. Способ управления движением для транспортного средства по любому из пп. 1-3, в котором
переключатель, который можно нажать, удерживая рулевое колесо, используется для ввода одобрения, и
рычаг указателя поворота используется для операции инструктирования смены полосы движения.
5. Устройство управления движением для транспортного средства, имеющее режим запуска функции автоматической смены полосы движения и запускаемый водителем режим функции автоматической смены полосы движения, причем режим запуска представляет собой режим, в котором смена полосы движения, предложенная автономной системой управления движением транспортного средства, выполняется посредством автономного управления движением с использованием функции автоматической смены полосы движения, причем запускаемый водителем режим представляет собой режим, в котором смена полосы движения, предписываемая водителем транспортного средства, выполняется с использованием функции автоматической смены полосы движения, при этом устройство управления движением содержит:
блок определения условий, сконфигурированный для определения того, удовлетворяется ли условие начала для функции автоматической смены полосы движения;
блок представления, сконфигурированный для того, чтобы, когда условие начала удовлетворено, представлять информацию о смене полосы движения относительно того, выполнять ли смену полосы движения;
блок ввода одобрения, в котором операция одобрения выполнения смены полосы движения выполняется в ответ на представление информации о смене полосы движения;
блок инструктирования смены полосы движения, с помощью которого выполняется операция инструктирования смены полосы движения, отличная от операции для блока ввода одобрения, причем блок инструктирования смены полосы движения управляется водителем; и
блок управления, сконфигурированный для переключения между режимом запуска с использованием функции автоматической смены полосы движения для выполнения смены полосы движения, предложенной информацией о смене полосы движения, при обнаружении операции блока ввода одобрения и запускаемого водителем режима с использованием функции автоматической смены полосы движения для выполнения смены полосы движения, предписываемой блоком инструктирования смены полосы движения при обнаружении операции блока инструктирования смены полосы движения,
при этом, когда операция блока инструктирования смены полосы движения водителем обнаруживается после того, как информация о смене полосы движения представлена в режиме запуска, запускаемый водителем режим используется для выполнения смены полосы движения, предписываемой блоком инструктирования смены полосы движения.
| JP 6447481 B2, 09.01.2019 | |||
| EP 3333047 A1, 13.06.2018 | |||
| US 2019071099 A1, 07.03.2019 | |||
| УСТРОЙСТВО ПОМОЩИ ПРИ ОТОБРАЖЕНИИ И СПОСОБ ПОМОЩИ ПРИ ОТОБРАЖЕНИИ | 2016 |
|
RU2678436C1 |

