Изобретение относится к пассивной радиолокации и может быть использовано в радиотехнических средствах для выделения отдельных импульсных последовательностей, принадлежащих разным радиолокационным станциям (РЛС), из смешанной выборки их сигналов с априорно неизвестной структурой.
Задача временной селекции на станции РТК возникает всякий раз, когда на входе анализирующего устройства одновременно присутствуют сигналы от нескольких источников излучения (РЛС), образуя сложную смесь импульсов. В современных РЛС широко используются сигналы, как с регулярным (детерминированным) периодом повторения импульсов (const и stagger), так и сигналы с изменением интервалов следования импульсов по случайному закону (jitter) [1].
Известен метод обнаружения в смешанном потоке сигналов импульсной последовательности на основе гистограммы разностей [2]. При его применении импульсную последовательность представляют в виде суммы единичных функций
где tn - время прихода n-го импульса, N - число импульсов, δ(⋅) - единичная функция Дирака. Затем формируют массивы разностей моментов фиксации импульсов уровня

где Δtqn, (
 Q<N) - разность q-то уровня времени прихода импульсов (ВПИ). После этого по каждому массиву {Δtqn} (начиная с уровня 1) строится гистограмма. Из полученных гистограмм формируют список потенциальных (вероятных) периодов повторения импульсов (ППИ), содержащий значения, для которых уровни (высоты ячеек) гистограммы превосходят определенный порог.
Q<N) - разность q-то уровня времени прихода импульсов (ВПИ). После этого по каждому массиву {Δtqn} (начиная с уровня 1) строится гистограмма. Из полученных гистограмм формируют список потенциальных (вероятных) периодов повторения импульсов (ППИ), содержащий значения, для которых уровни (высоты ячеек) гистограммы превосходят определенный порог.
В качестве пороговой может быть использована функция

где N - число наблюдаемых импульсов; β - константа, (β<1); nΔt - общее число элементарных ячеек гистограммы; τ - размер элементарной ячейки гистограммы; q - уровень гистограммы; g - константа меньше единицы.
Значения β и g находят опытным путем. Отметим, что здесь величина β задает предполагаемый процент потерянных импульсов. Следует заметить, что вычисленный на основе (1) порог не всегда приводит к правильным решениям. Кроме того, выбор параметров β и g сильно зависят от конкретной РЭО. Поэтому на практике часто используют порог в виде константы.
Недостатком метода гистограммы является отсутствие возможности выделения ППИ из смеси jitter-последовательностей. Кроме того, в условиях высокой плотности потока сигналов указанный метод не обеспечивает высокой достоверности селекции и сигналов с детерминированной структурой, вследствие присутствия на гистограмме интервалов (гармоник), кратных истинным ППИ.
В [3] показана возможность временной селекции на основе последовательного поиска по времени прихода импульсов. Сущность его состоит в том, что вначале задают последовательность с одним из интервалов, присутствующих в смеси. Затем последовательно проводится ее корреляционный анализ с исходной выборкой. Поиск по времени прихода включает в себя следующие шаги. Задают импульсную последовательность с одним из возможных ППИ. Осуществляют поиск совпадений заданной последовательности с исходной выборкой. Если последовательность с анализируемым интервалом обнаружена, она удаляется из выборки и процесс поиска повторяется с другими, имеющимися в смеси, интервалами.
Поскольку множества реальных значений ППИ, составляет лишь малое подмножество всех возможных значений, время поиска велико, что является недостатком данного метода.
Известен способ обнаружения импульсных последовательностей на базе интегрального преобразования смеси g(t), которое имеет вид [4]

где τ>0, tn, tm - время прихода смежных импульсов в смеси, n=2, …, N, m=n-1. В дальнейшем данную операцию будем называть ППИ-преобразованием.
Способ на основе ППИ-преобразования устраняет проблему появления гармонических составляющих при селекции простых сигналов, и кроме того он позволяет обнаруживать jitter-сигналы. Но данный метод имеет и недостатки. Наиболее важные из них - это необходимость задания границ предполагаемых ППИ анализируемых сигналов и отсутствие возможности разделения stagger-сигналов. Кроме того, при большой амплитуде ε вобуляции интервалов следования импульсов, относительно среднего значения, могут наблюдаться ложные пики (шумовые отчеты) на ППИ-представлении.
Наиболее близким по технической сущности к предлагаемому изобретению является способ [5], основанный на совместном применении гистограммы разностей и последовательного поиска. Он включает прием смешанного потока радиолокационных сигналов (РЛС) в течении интервала времени Тн, представление их в виде массива времен прихода импульсов (ВПИ), запоминание и выделение с помощью гистограммы разностей ВПИ с последующим поиском регулярных импульсных последовательностей, принадлежащих разным РЛС [4].
Для определения простой последовательности с помощью прототипа требуется как минимум 5 импульсов. Для идентификации составного (stagger) сигнала требуется выделить М непересекающихся во времени последовательностей с одинаковыми значениями ППИ, составляющих кадр (суммарный период) сигнала.
Прототип обеспечивает повышение достоверности выделения простых (const) и stagger-последовательностей благодаря вычислению на начальном этапе потенциальных (вероятных) ППИ. Однако ему присущ недостаток, связанный с недостаточной достоверностью выделения вобулирующих последовательностей.
Целью заявляемого способа временной селекции импульсных последовательностей является повышение достоверности разделения импульсных последовательностей с вобуляцией ППИ по случайному закону.
Поставленная цель достигается тем, что в известном способе временной селекции импульсных последовательностей, состоящем в том, что осуществляют прием смешанного потока радиолокационных сигналов (РЛС) в течение интервала времени Тн, представление их в виде массива времен прихода импульсов, запоминание и выделение с помощью гистограммы разностей времени их прихода с последующим поиском регулярных импульсных последовательностей, принадлежащих разным РЛС, дополнительно на подготовительном этапе диапазон возможных значений периода повторений импульсов (ППИ) Δτ=[τmin,τmax] разбивают на K элементарных интервалов длительностью b=(τmax-τmin)/K, выполняют первое ППИ-преобразование

где  k=1, 2, …, K, ε - верхняя граница вобуляции ППИ, k=k1, …, k2,
k=1, 2, …, K, ε - верхняя граница вобуляции ППИ, k=k1, …, k2,  b=(τmax-τmin)/K, найденные коэффициенты
b=(τmax-τmin)/K, найденные коэффициенты сглаживают
сглаживают на заданном интервале времени At и сравнивают с пороговым уровнем
на заданном интервале времени At и сравнивают с пороговым уровнем  , при выполнении пороговых условий
, при выполнении пороговых условий  принимают решение об обнаружении k-го элементарного интервала, принадлежащего const- или stagger-последовательности, контролируют правильность принятого решения с помощью последовательного поиска и при положительном результате селектируют импульсы той последовательности из входного смешанного потока, после обнаружения всех const- или stagger-последовательностей в суммарной импульсной последовательности и их селекции выполняют второе ППИ-преобразование
принимают решение об обнаружении k-го элементарного интервала, принадлежащего const- или stagger-последовательности, контролируют правильность принятого решения с помощью последовательного поиска и при положительном результате селектируют импульсы той последовательности из входного смешанного потока, после обнаружения всех const- или stagger-последовательностей в суммарной импульсной последовательности и их селекции выполняют второе ППИ-преобразование

где Ok - начальная точка отсчета, вычисленные коэффициенты  сглаживают
сглаживают  на заданном временном интервале Δt и сравнивают с пороговым уровнем
на заданном временном интервале Δt и сравнивают с пороговым уровнем  при выполнении пороговых условий
при выполнении пороговых условий  принимают решение об обнаружении k-го элементарного интервала, принадлежащего jitter-последовательности, контролируют правильность принятия решения с помощью последовательного поиска и при положительном результате селектируют импульсы обнаруженной последовательности из анализируемого смешанного потока, продолжают анализ оставшегося смешанного потока импульсов до момента его сокращения до пяти импульсов или по истечению заданного интервала времени ΔТз, ΔТр>ΔТз, где ΔТр - время анализа.
принимают решение об обнаружении k-го элементарного интервала, принадлежащего jitter-последовательности, контролируют правильность принятия решения с помощью последовательного поиска и при положительном результате селектируют импульсы обнаруженной последовательности из анализируемого смешанного потока, продолжают анализ оставшегося смешанного потока импульсов до момента его сокращения до пяти импульсов или по истечению заданного интервала времени ΔТз, ΔТр>ΔТз, где ΔТр - время анализа.
Также сглаживание коэффициентов  выполняют в соответствии с выражением
выполняют в соответствии с выражением

где k=2, 3, …, K-2,  - модуль числа, i=1, 2.
- модуль числа, i=1, 2.
Кроме того, в качестве порога Ak. используется величина, вычисляемая по формуле

где Tн - интервал наблюдения смеси, N - число импульсов в смеси, Ck - число импульсов последовательности с периодом равным τk, k=1, 2, …, K, bk - ширина k-го элементарного интервала, α, β, γ - настраиваемые параметры.
Вместе с тем первое ППИ-преобразование осуществляют при постоянной длительности элементарного интервала bk=b, а второе производят при предварительном смещении начальной точки Ok отсчета периода τk для k-го элементарного интервала и изменении длительности элементарных интервалов, согласно выражению bk=2ετk.
Также смещение начальной точки отсчета осуществляют в зависимости от значений параметров υ=η0+0.499 и  где
где  по правилу:
по правилу:
1) если υ=0, смещение не происходит,
2) если υ=1, tm=Ok или υ≥1,  то устанавливают новую начальную точку отсчета Ok=tn, где ς0 - положительный параметр, определяющий нестационарность начала времени отсчета.
то устанавливают новую начальную точку отсчета Ok=tn, где ς0 - положительный параметр, определяющий нестационарность начала времени отсчета.
Благодаря новой совокупности существенных признаков в заявляемом способе за счет использования в процессе временной селекции двух последовательных процедур на базе ППИ-преобразования, а также предварительного определения в смеси диапазона возможных значений интервалов следования импульсов и сглаживания отсчетов  i=1, 2, достигается расширение класса анализируемых сигналов и повышение достоверности выделения как регулярных сигналов (const, stagger), так и вобулирующих по случайному закону (jitter).
i=1, 2, достигается расширение класса анализируемых сигналов и повышение достоверности выделения как регулярных сигналов (const, stagger), так и вобулирующих по случайному закону (jitter).
Заявляемый объект поясняется чертежами, на которых показаны:
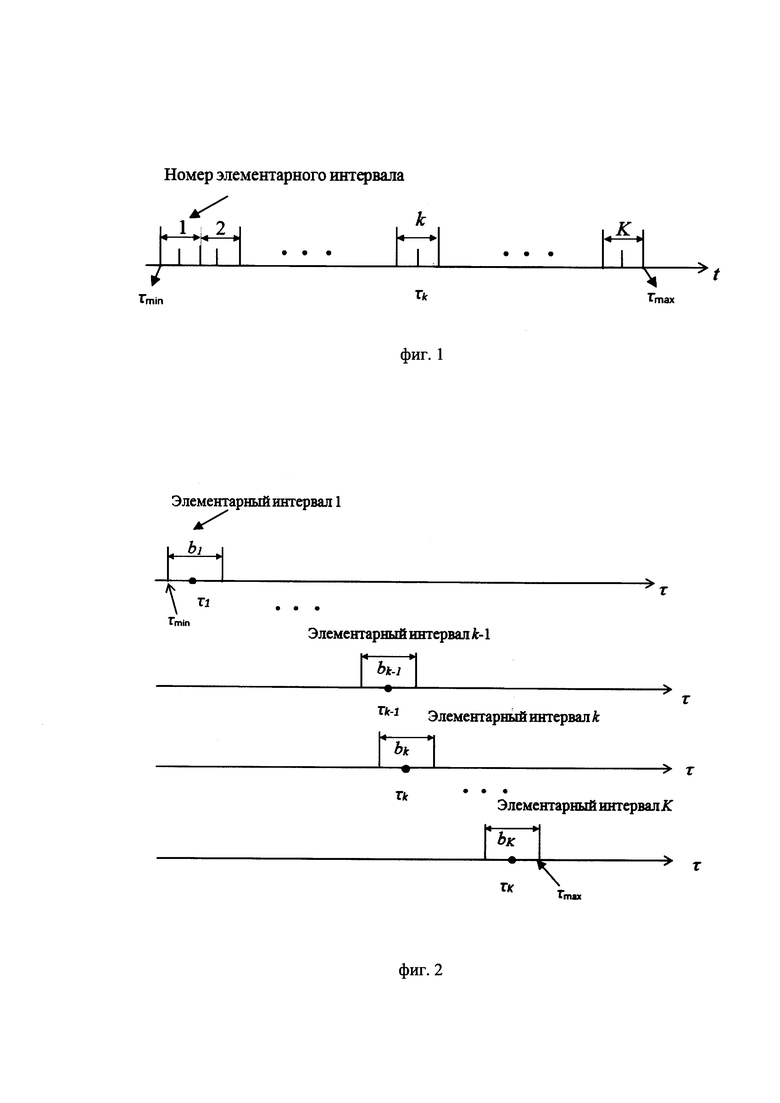
на фиг. 1 - разбиение диапазона возможных значений ППИ на интервалы равной ширины при анализе регулярных сигналов, присутствующих в смеси;
на фиг. 2 - перекрытие элементарных интервалов при анализе jitter-сигналов, присутствующих в смеси;
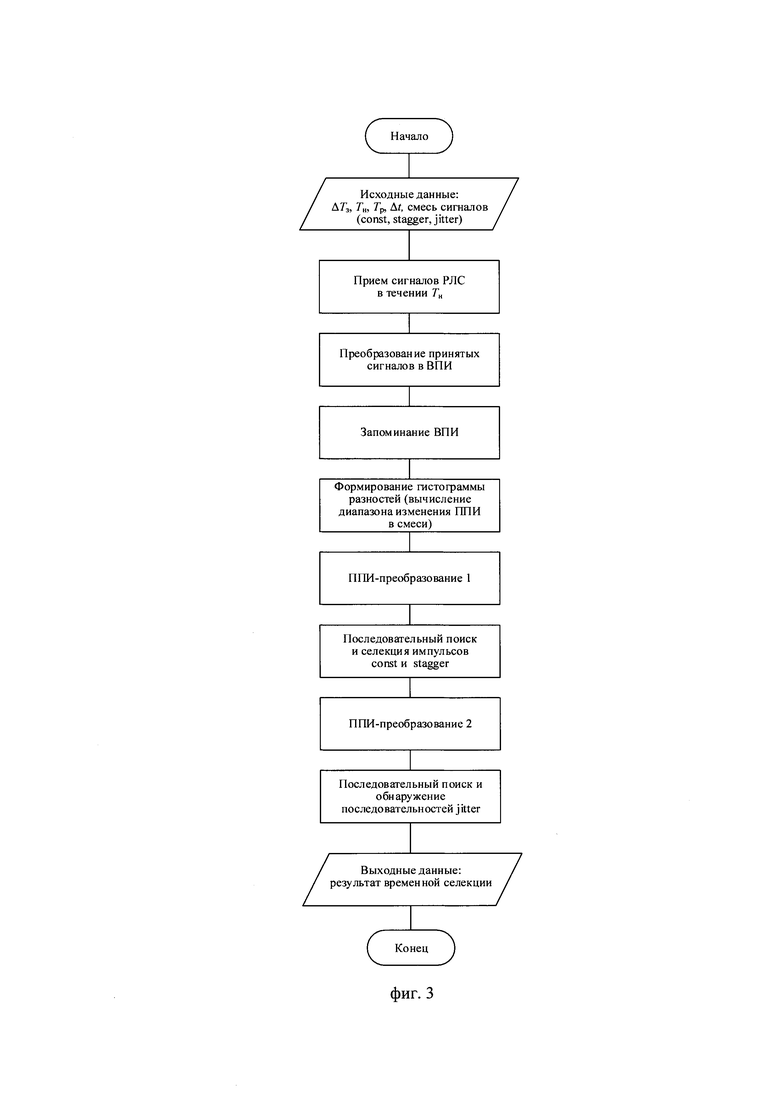
фиг. 3 - обобщенный алгоритм обнаружения и выделения регулярных и вобулирующих последовательностей;
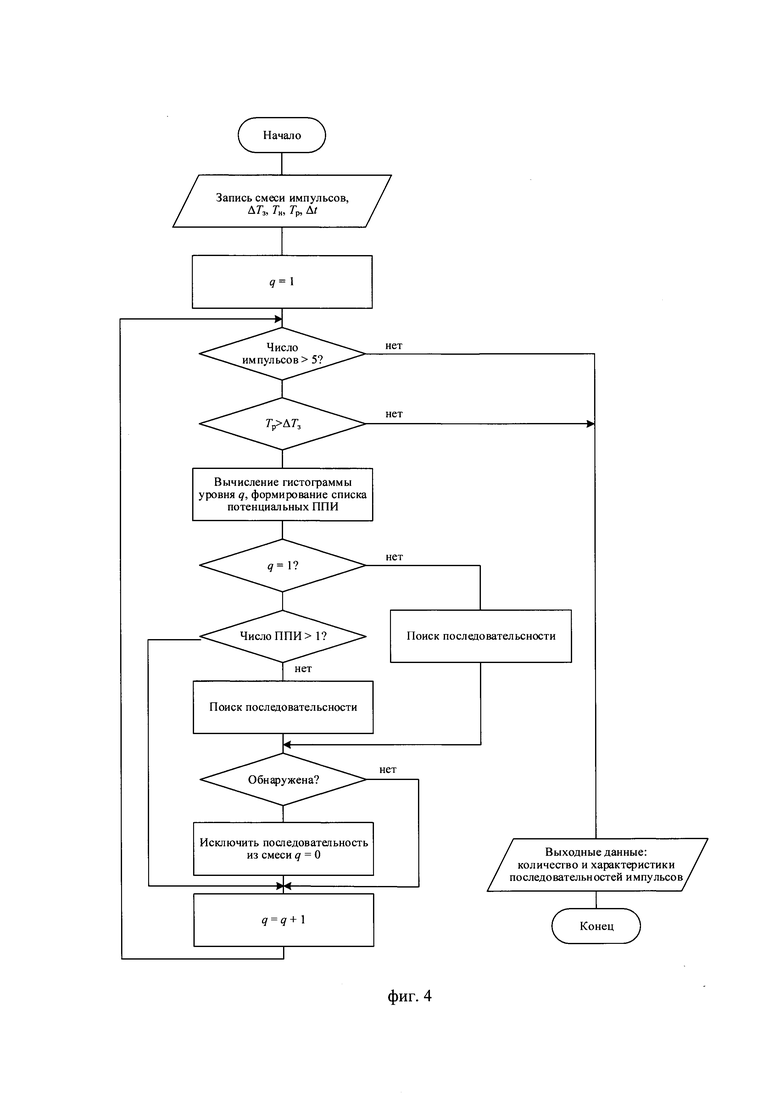
фиг. 4 - алгоритм селекции на основе гистограммы разностей и последовательного поиска;
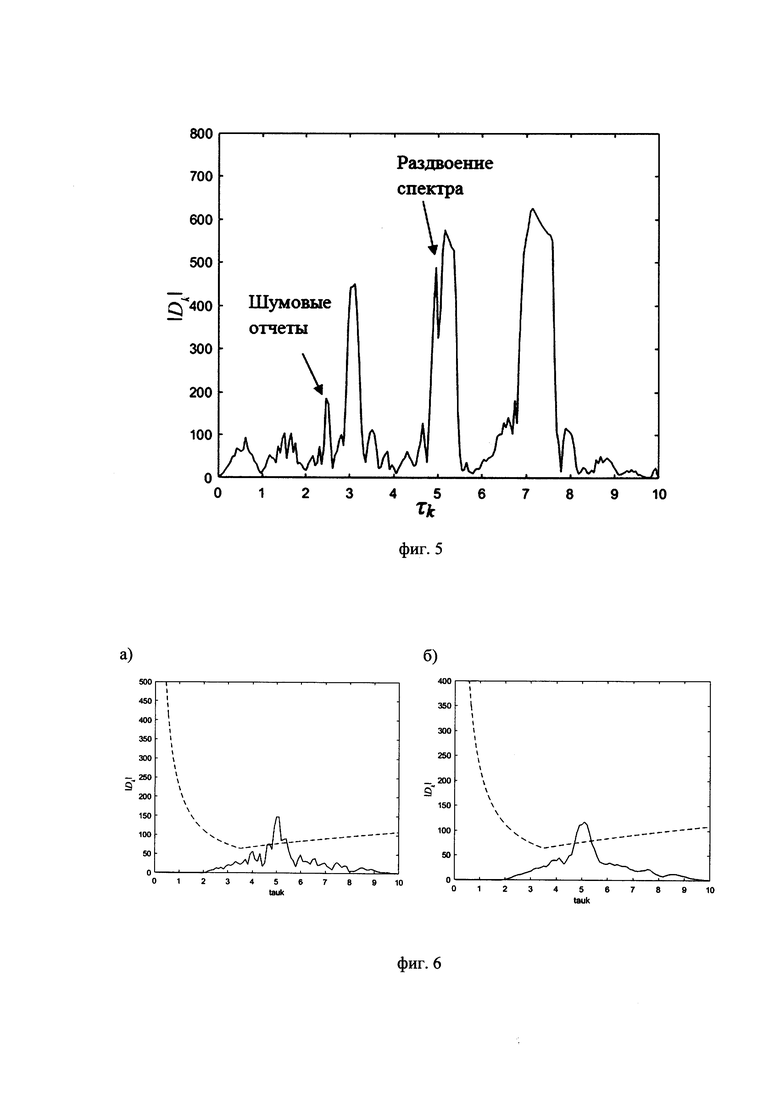
фиг. 5 - результат ППИ-преобразования трех перемешанных последовательностей с амплитудой вобуляции ε=0,2;
фиг. 6а - результат ППИ-преобразования последовательности с периодом T=5 мс (ε=0,25) без сглаживания;
фиг. 6б - результат ППИ-преобразования последовательности с периодом T=5 мс (ε=0,25) со сглаживанием;
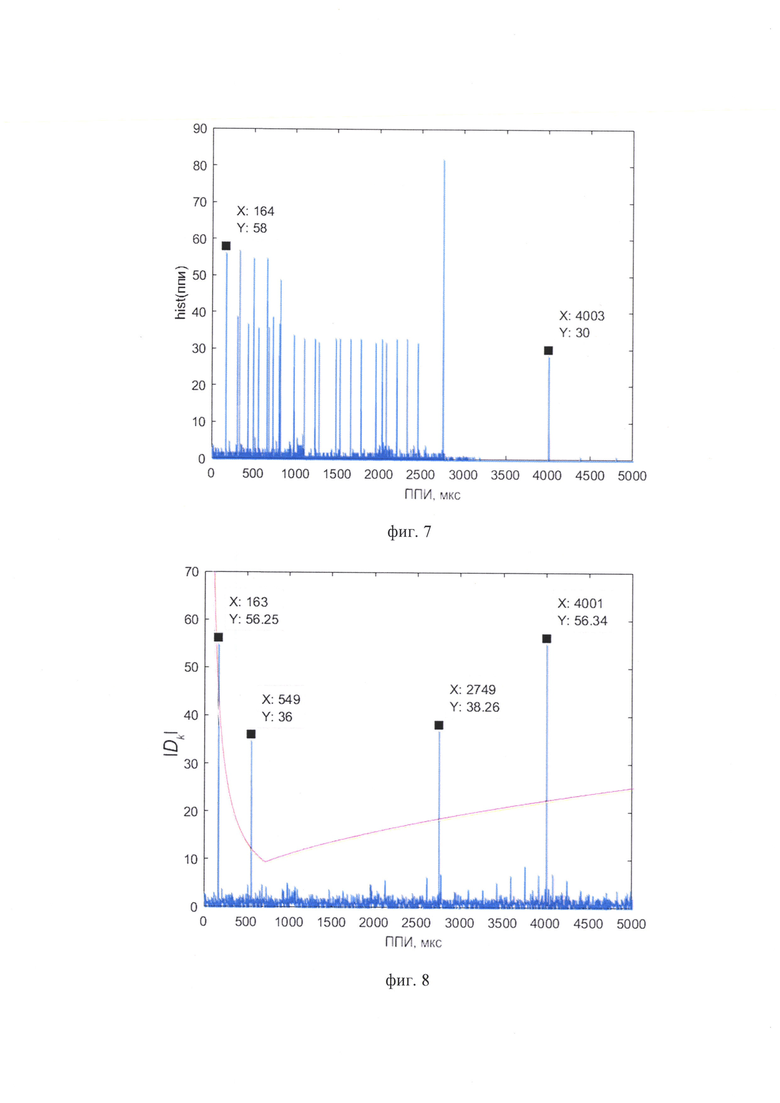
фиг. 7 - результат применения операции гистограммы разностей к анализируемой смеси из четырех перемешанных последовательностей;
фиг. 8 - результат применения ППИ-преобразования 1 к анализируемой смеси из четырех перемешанных последовательностей;
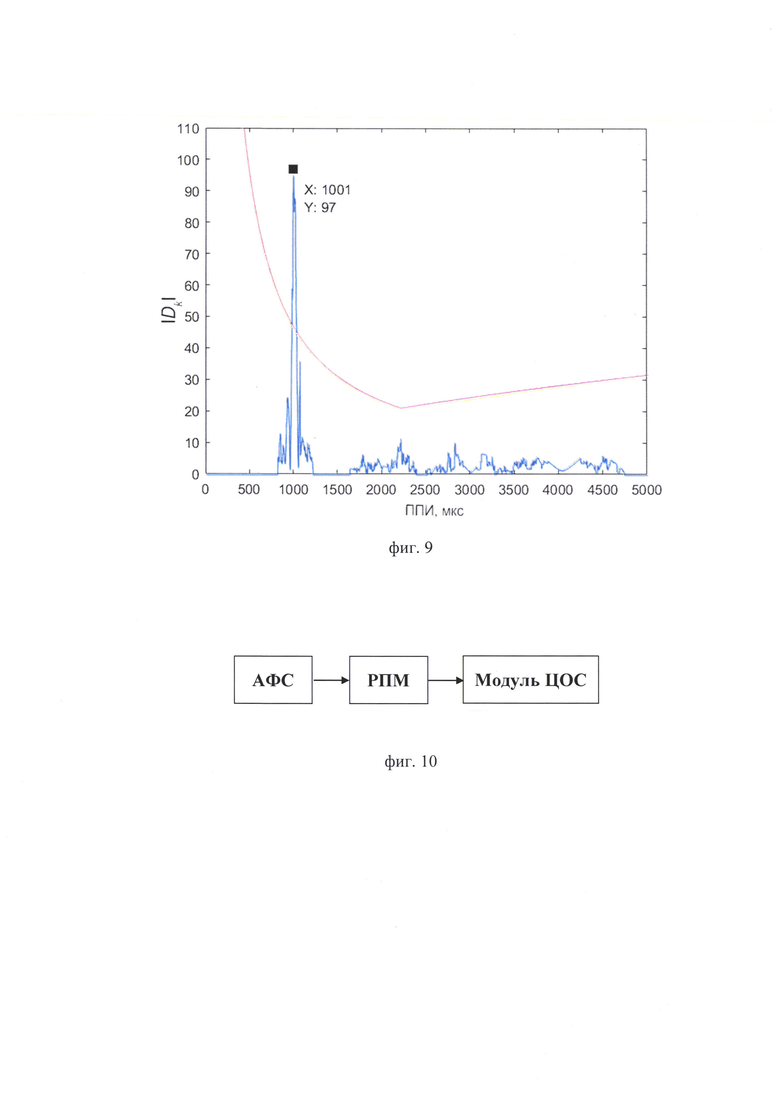
фиг. 9 - результат применения ППИ-преобразования 2 к анализируемой смеси из четырех перемешанных последовательностей;
фиг. 10 - обобщенная структурная схема устройства временной селекции.
Сущность изобретения состоит в следующем. На первом этапе обработки формируют массив ВПИ {tk} на выбранном интервале наблюдения Тн. Для этого принятие сигнала РЛС за время Тн преобразуют в массив ВПИ и запоминают его.
На втором этапе вычисляют диапазон изменения интервалов следования импульсов во входной смеси с использованием разностей ВПИ уровня q, q=1, 2, …, Qmax, где Qmax - настраиваемый параметр. Из полученных разностей формируются Qmax гистограмм и список ППИ, содержащий значения, для которых уровни гистограммы превосходят порог. Если в списке оказывается единственная разность, она принимается в качестве верхней границы диапазона. Если заданный порог превышают несколько разностей, их минимальное и максимальное значения принимают в качестве границ ППИ.
На третьем этапе проводят обнаружение и выделение импульсных последовательностей, присутствующих в смеси. Данный этап состоит из двух шагов (см. фиг. 3).
На первом шаге входную смесь анализируют на наличие последовательностей с постоянным значением ППИ (const) и изменяемых по детерминированному закону (stagger). Здесь используют ППИ-преобразование 1 с постоянным значением ширины элементарного интервала (см. фиг. 1).
На втором шаге применяют ППИ-преобразование 2 со смещением начала отсчета ВПИ и изменяемой шириной элементарных интервалов (см. фиг. 2). На данном шаге осуществляют проверку на наличие в смеси последовательности с перестройкой ППИ по случайному закону (jitter).
Как на первом так и на втором шаге для выделения обнаруженных последовательностей из входной смеси используют процедуру последовательного поиска. Критерием остановки поиска является определенный размер (число оставшихся импульсов М<5) во входной смеси.
При большой амплитуде ε вобуляции ППИ относительно среднего значения могут наблюдаться ложные пики (шумовые отчеты) на ППИ-представлении (спектре) (см. фиг. 5). Данный недостаток устраняют путем предварительного сглаживания коэффициентов ППИ-преобразования по формуле

где k=2, 3, …, K-2, i=1, 2.
На фиг. 6 приведен результат моделирования операция ППИ-преобразования (без сглаживания и со сглаживанием) применительно к последовательности с периодом Т=5 мс при ε=0,25. Из рассмотрения результата моделирования следует, что использование процедуры сглаживания на основе ППИ-преобразования смеси позволяет уменьшить ложные пики и тем самым повысить достоверность выделения вобулирующих последовательностей.
Продемонстрируем работоспособность предложенного способа временной селекции на другом примере. Предположим, что входной сигнал представляет собой смесь, состоящую из четырех импульсных последовательностей (по 50 импульсов в каждой) с разными видами изменения ППИ:
1) ППИ-const: Т1=163 мкс, Тз=4002 мкс;
2) ППИ-jitter, ε=10%: T1=1005 мкс;
3) ППИ-stagger: Т=T1+T2+T3+T4+T5=2750=300+425+550++675+800.
Первым шагом является оценка диапазона изменения ППИ в исходной смеси импульсных последовательностей с использованием гистограммы разностей. Результат работы данного этапа для 9-ти уровней разностей показан на фиг. 7. Из его рассмотрения следует, что верхняя граница диапазона изменения ППИ не превышает 4003 мкс. Минимальное значение интервала следования импульсов составляет 164 мкс.
Далее выполняют процедуру селекции, состоящую из двух этапов: обнаружение импульсных последовательностей и их выделение из входной смеси на основе ППИ-преобразования (1) согласно (3) и последовательного поиска. Результат обнаружения ППИ на данном этапе представлен на фиг. 8. Он показывает, что во входной смеси присутствуют, предположительно, четыре импульсные последовательности с периодами 163 мкс, 549 мкс, 2749 мкс и 4001 мкс. Методом последовательного поиска подтверждено наличие последовательностей с такими ППИ за исключением сигнала с интервалом 549 мкс, являющийся ложным. Последовательный поиск предполагает поочередный просмотр массива ВПИ с заданным интервалом (периодом). Наличие импульсов в контролируемых временных точках является основанием для принятия решения об обнаружении (наличии) импульсной последовательности с определенными (контролируемыми) характеристиками. Сигнал со случайным изменением ППИ от импульса к импульсу, присутствующий в смеси, на данном этапе алгоритма не обнаружен.
После удаления выявленных последовательностей из входной смеси, осуществляют проверку условия остановки селекции: «число оставшихся импульсов не должно превышать требуемого значения». Если это условие не выполняется осуществляют переход ко второму этапу селекции, а именно проверка на наличие вобулирующей последовательности на основе ППИ-преобразования 2 согласно (4). Применительно к рассматриваемому примеру результат работы данного этапа селекции показан на фиг. 9. На фиг. 9 виден пик примененного ППИ-преобразования 2 в точке со значением T=1001 мск. Методом последовательного поиска подтверждено наличие последовательности с таким ППИ и вобуляцией его интервалов следования импульсов относительно Т.
Таким образом, предложенный способ временной селекции позволяет реализовать разделение смешанного потока на отдельные импульсные последовательности, принадлежащие одному из трех классов: простые (const), регулярные (stagger) и вобулирующие (jitter).
Путем моделирования было показано, что на базе предложенного способа селекции выделяют импульсные последовательности с достоверностью не менее 0,9, что в 1,6-1,7 раза выше достоверности, достигнутой прототипом для одинаковых условий проведения эксперимента.
На фиг. 10 приведена обобщенная структурная схема устройства временной селекции в соответствии с заявляемым способом. Оно содержит последовательно соединенные антенно-фидерную систему (АФС), радиоприемный модуль (РПМ) и модуль цифровой обработки сигналов (ЦОС).
С помощью АФС и РПМ осуществляется прием смешанного потока (смеси) радиолокационных сигналов, который далее поступает в блок ЦОС. Здесь их преобразуют в цифровую форму и формируют выборку ВПИ на заданном интервале наблюдения. На их основе производится выделение присутствующих в смеси импульсных последовательностей согласно представленным в способе процедурам (см. фиг. 3).
Реализация устройства известна и трудностей не вызывает. В качестве АФС могут быть использованы спиральные антенны (см. Антенны измерительные АС 8.33.1 - АС 8.33.2, ОАО «НПЦ СКАРД», Россия).
Радиоприемный модуль может быть реализован по известной схеме (см. М.Н. Воропай, С.В. Иванов. Синтез структуры и реализация широкополосного радиоприемного устройства в диапазоне рабочих частот 0,02…18 ГГц для комплексов радиомониторинга // ИВД 2010, №2, с. 108-120).
Измерение времени прихода импульсов (модуль ЦОС) выполняют с помощью реализации быстрого преобразования Фурье с функциональной обработкой входных сигналов на программируемых логических интегральных схемах семейства Virtex-5 фирмы Xilinx, сигнальном процессоре TMS320C6455. На этих же элементах реализуют процедуры построения гистограммы разностей, последовательного поиска и двух ППИ-преобразований со сглаживанием.
Источники информации.
1. Терентьев А.В., Короткое В.Ф. Радиотехническая разведка: Теория и практика обработки радиолокационных сигналов. - СПб.: Медиапапир, 2021.
2. Н.K. Mardia, BSc. PhD «New techniques for the deinterleaving of repetitive se-quences» IEE PROCEEDINGS, Vol. 136, Pt. F, No.4, AUGUST 1989.
3. D.J. Milojevic and B.M. Popovic «Improved algorithm for the deinterleaving of radar pulses» IEE PROC, Vol. 139, Pt. F, No. 1, FEBRUARY 1992 pp. 98-104.
4. Nishiguchi K.I., Kobayashi M., «Improved algorithm for estimating pulse repetition intervals», IEEE Transactions on Aerospace and Electronic Systems, pp. 407-421, 2000.
5. Короткое В.Ф., Зырянов P.С. Разделение импульсных последовательностей в смешанном потоке сигналов // Изв. вузов России. Радиоэлектроника. 2017. №3. С. 5-10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| Устройство для выделения периодических последовательностей цифровых сигналов | 2023 |
|
RU2827495C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ | 1979 |
|
SU1840922A1 |
| СПОСОБ АДАПТИВНОГО ОБЗОРА ЗОНЫ ДЕЙСТВИЯ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2018 |
|
RU2701377C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ НИЗКОЛЕТЯЩЕЙ МАЛОСКОРОСТНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ИНВЕРТИРУЕМОЙ ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2017 |
|
RU2697509C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
Изобретение относится к пассивной радиолокации и может быть использовано в радиотехнических средствах для выделения из смешанной выборки сигналов радиолокационных станций (РЛС) с априорно неизвестной структурой отдельных импульсных последовательностей. Техническим результатом является повышение достоверности временной селекции импульсных последовательностей. Указанный результат достигается благодаря выполнению двух операции интегрального преобразования разностей времен прихода импульсов со сглаживанием, что позволяет выделять из смеси не только регулярные последовательности с детерминированным законом изменения интервалов следования импульсов, но и последовательности вобулирующие по случайному закону. 4 з.п. ф-лы, 10 ил.
1. Способ временной селекции импульсных последовательностей, включающий прием смешанного потока радиолокационных сигналов (РЛС) в течение интервала времени Тн, представление их в виде массива времен прихода импульсов (ВПИ), запоминание и выделение с помощью гистограммы разностей ВПИ с последующим поиском регулярных импульсных последовательностей, принадлежащих разным РЛС, отличающийся тем, что дополнительно на подготовительном этапе диапазон возможных значений периода повторений импульсов (ППИ) Δτ=[τmin,τmax] разбивают на K элементарных интервалов длительностью b=(τmin-τmax)/K выполняют первое ППИ-преобразование

где  k=1, 2, …, K, ε - верхняя граница вобуляции ППИ,
k=1, 2, …, K, ε - верхняя граница вобуляции ППИ,
k=k1,…,k2,  найденные коэффициенты
найденные коэффициенты  сглаживают
сглаживают  на заданном интервале времени Δt и сравнивают с пороговым уровнем
на заданном интервале времени Δt и сравнивают с пороговым уровнем  при выполнении пороговых условий
при выполнении пороговых условий  принимают решение об обнаружении k-го элементарного интервала, принадлежащего const- или stagger-последовательности, контролируют правильность принятого решения с помощью последовательного поиска и при положительном результате селектируют импульсы этой последовательности из входного смешанного потока, после обнаружения всех const- или stagger-последовательностей в суммарной импульсной последовательности и их селекции выполняют второе ППИ-преобразование
принимают решение об обнаружении k-го элементарного интервала, принадлежащего const- или stagger-последовательности, контролируют правильность принятого решения с помощью последовательного поиска и при положительном результате селектируют импульсы этой последовательности из входного смешанного потока, после обнаружения всех const- или stagger-последовательностей в суммарной импульсной последовательности и их селекции выполняют второе ППИ-преобразование

где Ok - начальная точка отсчета, вычисленные коэффициенты  сглаживают
сглаживают  на заданном временном интервале Δt и сравнивают с пороговым уровнем
на заданном временном интервале Δt и сравнивают с пороговым уровнем  при выполнении пороговых условий
при выполнении пороговых условий  принимают решение об обнаружении k-го элементарного интервала, принадлежащего jitter-последовательности, контролируют правильность принятия решения с помощью последовательного поиска и при положительном результате селектируют импульсы обнаруженной последовательности из анализируемого смешанного потока, продолжают анализ оставшегося смешанного потока импульсов до момента его сокращения до пяти импульсов или по истечению заданного интервала времени ΔТз, ΔТр>ΔТз, где ΔТр - время анализа.
принимают решение об обнаружении k-го элементарного интервала, принадлежащего jitter-последовательности, контролируют правильность принятия решения с помощью последовательного поиска и при положительном результате селектируют импульсы обнаруженной последовательности из анализируемого смешанного потока, продолжают анализ оставшегося смешанного потока импульсов до момента его сокращения до пяти импульсов или по истечению заданного интервала времени ΔТз, ΔТр>ΔТз, где ΔТр - время анализа.
2. Способ по п. 1, отличающийся тем, что сглаживание коэффициентов  выполняют в соответствии с выражением
выполняют в соответствии с выражением

где k=2, 3, …, K-2,  - модуль числа, i=1, 2.
- модуль числа, i=1, 2.
3. Способ по п. 1, отличающийся тем, что в качестве порога  используется величина, вычисляемая по формуле
используется величина, вычисляемая по формуле

где Тн - интервал наблюдения смеси, N - число импульсов в смеси, Ck - число импульсов последовательности с периодом равным τk, k=1, 2, …, K, bk - длительность k-то элементарного интервала, α, β, γ - настраиваемые параметры.
4. Способ по п. 1, отличающийся тем, что первое ППИ-преобразование осуществляют при постоянной длительности элементарного интервала bk=b а второе производят при предварительном смещении начальной точки Ok отсчета периода τk для k-го элементарного интервала и изменении длительности элементарных интервалов, согласно выражению bk=2ετk.
5. Способ по п. 4, отличающийся тем, что смещение начальной точки отсчета осуществляют в зависимости от значений параметров υ=η0+0.499 и  где
где  по правилу:
по правилу:
1) если υ=0, смещение не происходит,
2) если υ=1, tm=Ok или υ≥1,  то устанавливают новую начальную точку отсчета Ok=tn, где ς0 - положительный параметр, определяющий нестационарность начала времени отсчета.
то устанавливают новую начальную точку отсчета Ok=tn, где ς0 - положительный параметр, определяющий нестационарность начала времени отсчета.
| СПОСОБ СЕЛЕКЦИИ ИМПУЛЬСНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2018 |
|
RU2702077C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ПЕРИОДИЧЕСКИХ ИМПУЛЬСОВ | 2000 |
|
RU2173936C1 |
| СЕЛЕКТОР ИМПУЛЬСНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 2000 |
|
RU2173935C1 |
| CA 1107398 A1, 18.08.1981 | |||
| EP 3751307 A1, 16.12.2020. | |||
