Изобретение относится к радиолокации воздушных целей (ВЦ) и может быть использовано в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС) военного и гражданского назначения:
решающих задачи обнаружения и сопровождения ВЦ, в т.ч. и низколетящих малоскоростных целей, в режимах с высокой (ВЧП) частотой повторения импульсов (ЧПИ)
и обеспечивающих технически внутриимпульсную линейную частотную модуляцию (ЛЧМ) несущей частоты с возможностью изменения знака и модуля крутизны ЛЧМ для излучаемых пачек зондирующих импульсов (ПЗИ).
Изобретение применимо для стационарных и мобильных ИД РЛС наземного, корабельного и авиационного базирования.
Известны [1-3 и др.] и широко применяются способы обнаружения ВЦ в ИД РЛС при ВЧП (и малой скважности), позволяющие раскрыть «слепые зоны», обусловленные бланкированием приемника на время излучения импульса. Для этого излучается несколько немодулированных ПЗИ с разными значениями ЧПИ. Количество пачек Nпзи для обнаружения и значения ЧПИ Fп(i) (i=1, …, Nпзи) рассчитываться заранее (с учетом предельной дальности обнаружения ВЦ). При обнаружении ВЦ одновременно определяется и скорость сближения цели - по измерению доплеровской частоты при немодулированной ПЗИ. Для определения дальности до ВЦ в режимах высокой и средней (СЧП) ЧПИ используются специальные способы, обеспечивающие устранение неопределенности по номеру (индексу) того периода повторения импульсов, к которому принадлежит неоднозначное измерение внутрипериодного положения (временной задержки) сигнала цели (ВПЦ).
Известен ряд способов устранения неоднозначности и определения дальности до ВЦ в режимах ВЧП и СЧП, например, патенты: US 4713664 А, дата публикации (д.п.) 15.12.87; ЕР 0490423 А, д.п. 17.06.92; RU 2010244 С1, д.п. 30.03.94; FR 2709835 А, д.п. 17.03.95; US 5546088 А, д.п. 13.06.96; US 5905458, д.п. 19.11.97; RU 2145092 С1, д.п. 27.01.2000; RU 98104808 А, д.п. 27.01.2000; ЕР 1043601 А1, д.п. 11.10.2000; WO 020633336 А1, д.п. 15.08.2002; RU 2237265 С1, д.п. 27.05.2003; RU 2206102, д.п. 10.06.2003; RU 2221258 С1, д.п. 01.10.2004; RU 2237265, д.п. 27.09.2004; RU 2296346, д.п. 27.03.2007 и др.
В указанных способах используются измерения временных и/или частотных радиолокационных параметров, а именно:
- неоднозначное измерение дальности как ВПЦ (временной задержки);
- доплеровская частота (при немодулированной ПЗИ) и смещение доплеровской частоты (при ПЗИ с ЛЧМ), зависящие от скорости, дальности и крутизны ЛЧМ.
Способы, использующие только измерения ВПЦ, после обнаружения ВЦ для разрешения неопределенности при ВЧП требуют дополнительно излучать относительно длительную серию ПЗИ с разными ЧПИ (например, при дальности 100 км - это 8…12 и более пачек). Это существенно снижает темп обзора, но обеспечивается высокую точность (на уровне точности измерения ВПЦ). Способы, основанные только на частотных измерениях, после обнаружения и определения доплеровской частоты ВЦ требуют излучения 1…2 ПЗИ с ЛЧМ, но имеют низкую точность однозначного определения дальности (с ошибкой от одного до нескольких км).
В способах, использующих и частотные и временные измерения, сначала на основе сигналов с ЛЧМ формируется однозначная оценка дальности, а затем по ней оценки определяется:
- номер периода повторения, которому соответствует неоднозначное измерение ВЦП (т.е. неоднозначность полностью устраняется) и осуществляется коррекция дальности с использованием значения ВПЦ;
- диапазон номеров периодов (снижение неоднозначности), с учетом которого далее, путем варьирования ЧПИ в следующих пачках, неоднозначность окончательно устраняется, определяется дальность на уровне точности измерения ВПЦ (но при меньших временных затратах, в сравнении со способами, основанными только на переборе ЧПИ).
В способах, не использующих изменение ЧПИ, для полного устранения неоднозначности может использоваться статистическая обработка выборок измерений однозначной и неоднозначной дальности. Например, известен [RU 2237265, 27.09.2004] измеритель дальности на основе ЛЧМ, в котором повышение точности достигается на основе статистической обработки (сглаживания) нарастающей выборки измерений:
- однозначной дальности, выполненных известным способом [1] - с использованием частотных измерений по немодулированному сигналу и сигналу с ЛЧМ;
- измерений ВПЦ (задержек).
При достаточном объеме таких выборок данный способ позволяет достичь точности определения дальности на основе ЛЧМ сигналов, достаточной для разрешения неоднозначности по номеру периода и, следовательно, получить итоговую оценку дальности с точностью, на уровне точности измерений точности измерений ВПЦ. Однако, для достижения точности, требуемой при ВЧП, необходим значительный объем выборок, получение которого затруднено при ограничениях на время радиоконтакта с целью.
К недостаткам, присущим указанным способам измерения дальности с использованием ЛЧМ, относятся:
- низкая точность определения дальности по сигналам с ЛЧМ, недостаточная для разрешения неопределенности по номеру периода в режимах с ВЧП;
- необходимость в значительном количестве дополнительных пачек для получения высокой точности по дальности (для накопления статистической выборки или реализации комбинируемого способа - с перебором ЧПИ);
- невозможность их применения для малоскоростных ВЦ.
Последнее обстоятельство обусловлено тем, что для указанных способов предполагается обнаружение ВЦ при немодулированной ПЗИ, определение скорости ВЦ по доплеровской частоте, расположенной по частотной оси в «зоне прозрачности» - вне спектральной области «мощных» мешающих отражений от земли (подстилающей поверхности, местных предметов и пр.). Такое расположение возможно только при относительно высокой скорости ВЦ. При малой же скорости ВЦ ее сигнал имеет незначительный доплеровский сдвиг, попадает в зону мешающих отражений, где не может быть выделен. Мощные мешающие отражения, при нахождении цели в главном луче (ГЛ) могут быть могут быть как по ГЛ - при обзоре «сверху вниз», так и по боковым лепесткам (БЛ) - при обзоре «снизу вверх» и, особенно, при малых значениях угла места оси ГЛ.
Известен способ [RU 2221258 С1, дата публикации 01.10.2004] измерения дальности до нескольких целей ИД РЛС со средней ЧПИ. Данный способ, принятый в качестве прототипа изобретения, предполагает выполнение следующих действий.
1. Поиск ВЦ, обнаружение и измерение неоднозначных РЛ параметров обнаруженной цели - ВПЦ (временной задержки) и доплеровской частоты - осуществляется при излучении ПЗИ с заданной крутизной ЛЧМ S1.
Прием отраженных от ВЦ и земли сигналов осуществляется многоканальным (по задержке и доплеровской частоте) приемным устройством с ЛЧМ-гетеродином. Неоднозначные значения ВПЦ и доплеровской частоты измеряются в тех каналах, где были обнаружены отраженные сигналы ВЦ.
2. При той же ЧПИ, как и в позиции 1, последовательно излучаются две ПЗИ со значениями S2 и S3 крутизны ЛЧМ, причем: значение крутизны S1 является средним между значениями S2 и S3, а приращения крутизны имеют разные знаки, т.е.
ΔS12=S1-S2>0, ΔS13=S1-S3<0 или ΔS12=S1-S<0, ΔS13=S1-S3>0.
Величины приращений выбираются такими, чтобы суммарное смещение не превышало значения ЧПИ за вычетом протяженности «слепой» зоны по частоте даже для ВЦ, находящихся на максимальном удалении, т.е.
|ΔS12|+|ΔS13|≤Fп-ΔFсз, где Fп - ЧПИ; ΔFсз - ширина слепой зоны по доплеровской частоте.
При изменении крутизны ЛЧМ обнаружение сигнала ВЦ и измерение происходит в тех же каналах дальности, как и позиции 1. После гетеродинирования сигнал лишается модуляции ЛЧМ, но сохраняет смещение, пропорциональное времени запаздывания (дальности) и значению приращения крутизны.
Поскольку приращения крутизны имеют разные знаки, то смещение по оси частот относительно первоначального измерения осуществляется в разных направлениях. С учетом ограничений на суммарное смещение, при повторных измерениях хотя бы один раз сигнал оказывается в «зоне прозрачности» по доплеровской частоте.
3. При запомненных частотных измерениях, выполненных в позиции 1, при хотя бы одном частотном измерении в позиции 2 и известном приращении крутизны становится возможным однозначное определение дальности до ВЦ.
При этом точность оценки дальности позволяет при СЧП однозначно определить номер того периода повторения импульсов (ППИ), к которому относится неоднозначное измерение ВПЦ (времени задержки).
К основным недостаткам прототипа можно отнести следующее.
1. Низкая точность однозначного определения дальности, прежде всего, из-за относительно небольших значений используемой крутизны ЛЧМ и приращений крутизны (в рамках ограничений СЧП и большой протяженности «слепой» зоны по доплеровской частоте). Достижимая при этом точность определения дальности (погрешность до нескольких км) позволяет раскрыть неопределенность по дальности только для режимов с СЧП (с большими периодами повторения импульсов (ППИ), соответствующими дистанциям до 10-ти и более км). Но для режимов с ВЧП (при ППИ около 1 км и менее) данный способ неприменим, т.к. не позволяет раскрыть неопределенность по дальности.
2. Отсутствует возможность определения текущих значений скорости сближения ВЦ, поскольку при поиске и обнаружении ВЦ и при последующих излучениях не предусмотрено использование смодулированных пачек зондирующих импульсов.
3. Невозможность применения данного способа для определения дальности до малоскоростных ВЦ, находящихся на относительно небольших дистанциях, поскольку:
- при малой крутизне и малой дальности до малоскоростной ВЦ (сигнал которой при немодулированной пачке находился бы в слепой зоне) смещение доплеровской частоты сигнала ВЦ при ЛЧМ может быть недостаточным для появления сигнала в зоне прозрачности;
- при высокой скорости носителя слепая зона занимает значительную относительную протяженность в пределах средней ЧПИ.
Кроме того, при ЛЧМ границы слепой зоны имеют частотный сдвиг (пропорциональный крутизне и дальности до источника помех, например, по боковым лепесткам [1, с. 374]), причем это сдвиг происходит в том же направлении, что и смещение сигнала ВЦ.
Важным моментом в способе-прототипе является то, что поиск/обнаружение ВЦ выполняется на основе пачек с ЛЧМ с некоторой крутизной S1. Это обстоятельство показывает возможности обнаружения сильно удаленных малоскоростных целей. Однако в прототипе на обстоятельство не указывается.
Известен также способ [RU 2296346, дата публикации 27.03.2007] измерения дальности в ИД РЛС, в котором первый шаг (обнаружение и однозначное измерение дальности) выполняется аналогично прототипу с тем отличием, что исходное значение крутизны S1 априорно рассчитывается. Расчет крутизны осуществляется, исходя из обеспечения возможности «грубого» измерения дальности для всех ВЦ в пределах дальности действия РЛС. Кроме того рассчитывается и требуемое значение крутизны для следующей пачки. Опираясь на полученные однозначные значения дальностей, рассчитывается новое значение ЧПИ (для следующей пачки, излучаемой с требуемой крутизной ЛЧМ), обеспечивающее попадание сигналов в зону прозрачности по дальности. По отраженным сигналам этой пачки, аналогично первому этапу, для каждой ВЦ определяется однозначная дальность, измеряется ВПЦ (задержка), рассчитывается номер периода и определяется итоговое уточненное значение дальности.
Способ [RU 2296346, 27.03.2007] сохраняет недостаток прототипа, связанный с обнаружением/определения дальности до близкорасположенных малоскоростных ВЦ. Кроме того, априорно рассчитываемая крутизна ЛЧМ (ориентированная на все ВЦ, в том числе максимально удаленные) имеет малую величину, что еще более усложняет смещение сигнала малоскоростной ВЦ в зону прозрачности. При СЧП, для малоскоростных ВЦ с доплеровскими частотами, меньше чем одна ЧПИ, изменение ЧПИ не дает возможности изменить положение сигнала цели на частотной оси. После изменения ЧПИ в данном способе используется крутизна ЛЧМ превышающая исходную крутизну, но точность по дальности при этом хотя и повышается, но остается на уровне базового способа ЛЧМ дальнометрии [1] и не позволяет раскрыть неопределенность по номеру периода в режиме с ВЧП. Возможность определения скорости сближения ВЦ при таком способе дальнометрии также отсутствует, т.к. отсутствует немодулированная ПЗИ.
Общим для прототипа и аналога является существенное «загрубление» оценок дальности, поскольку при ее расчете используются измерения смещений частоты при ЛЧМ относительно несущей, без учета составляющей этого смещения из-за скорости сближения.
Способ [RU 2221258 С1, 01.10.2004] измерения дальности до нескольких целей ИД РЛС со средней частотой повторения не может быть применен в режимах с ВЧП, но является наиболее близким к изобретению аналогом (прототипом) по признакам:
связанным с обнаружением ВЦ по сигналам с ЛЧМ;
расчетом дальности только по измерениям смещенной дальномерной частоты - без использования сигналов по немодулированной ПЗИ.
Учитывая вышеуказанные основные недостатки прототипа, задачами изобретения являются:
обеспечение возможности для ИД РЛС в режиме ВПЧ обнаруживать в узконаправленном ГЛ малоскоростные ВЦ, т.ч. низколетящие и относительно близко расположенные;
возможности для определения скорости сближения с ВЦ и дальности при отсутствии непосредственного измерения доплеровской частоты сигнала ВЦ по немодулированной ПЗИ;
повышение точности определения скорости и точности определения дальности по сигналам с ЛЧМ до уровня, позволяющего разрешить неопределенность по ППИ в режиме с ВЧП и получить высокоточную оценку дальности (на уровне погрешностей измерения неоднозначной задержки), причем при количестве ПЗИ, используемых для определения скорости и дальности, не большем, чем в прототипе.
Решение указанных задач составляет технический эффект изобретения, который в заявленном способе обнаружения, измерения дальности и скорости низколетящей малоскоростной ВЦ в импульсно-доплеровских РЛС при высокой ЧПИ и инвертируемой ЛЧМ достигается следующим образом.
Физическая суть способа в части, касающейся обеспечения возможности обнаружения малоскоростной ВЦ, заключается в том, что в отраженном сигнале расположение и ширина спектра мощных мешающих отражений от земли (МО) при немодулированной ПЗИ зависит от скорости носителя РЛС, а при пачке с ЛЧМ - ширина спектра МО изменяется незначительно, а сам спектр смешается по частотной оси в зависимости от крутизны ЛЧМ и расстояний до зон МО на земле [1]. При разнице расстояний от РЛС до ВЦ и до зон МО при одинаковой крутизне ЛЧМ смещение спектра МО и сигнала ВЦ будет различным. В рамках диапазона высокой ЧПИ при малоскоростных ВЦ существует возможность использования больших значений крутизны ЛЧМ, при которых даже при относительно небольшой разнице расстояний до МО и ВЦ сигнал ВЦ при ЛЧМ смещается в «прозрачную» частотную область, где может быть выделен и, следовательно, ВЦ будет обнаружена. В частности, при малом угле места ГЛ при наблюдении надгоризонтной низколетящей ВЦ, мощные МО по боковым лепесткам (БЛ) формируются на относительно небольших удалениях (зависящих от высоты антенны РЛС над землей), что позволяет наблюдать низколетящие малоскоростные ВЦ и на относительно малых дистанциях (например, от нескольких км - для авиационных бортовых ИД РЛС, еще меньших дистанциях - для наземных РЛС с антенной на мачте). Кроме того, ЛЧМ позволяет смещать сигнал цели не только в рамках наблюдаемого диапазона [f0; Fп], но и в область частоты с другим индексом ЧПИ.
Физическая суть способа в части, касающейся определения дальности и скорости по сигналам с ЛЧМ и повышения точности таких определений, заключается в том, что использование:
бинарных измерений смещенной ЛЧМ частоты, полученных при разной крутизне, позволяет получить значение дальности, инвариантное относительно скорости ВЦ, а также и значение скорости без использования данных о доплеровской частоте ВЦ при немодулированной ПЗИ;
значений разнознаковой крутизны при определении дальности фактически приводит к аналитическому синтезу эквивалентной крутизны, модуль которой равен сумме модулей двух значений физической крутизны ЛЧМ, использованных в способе.
Способ обнаружения, измерения дальности и скорости низколетящей малоскоростной ВЦ в импульсно-доплеровских РЛС при высокой ЧПИ и инвертируемой ЛЧМ основан на излучении ПЗИ с заданной частотой повторения (ЧПИ) Fп - из набора значений ЧПИ, заранее рассчитанных любым из известных способов [1-3 и др.], обеспечивающим при обнаружении ВЦ раскрытие «слепых» зон из-за бланкирования приемника на время излучения, а также с внутри-импульсой ЛЧМ несущей частоты ƒ0 с заданной крутизной S. Излучение такой ПЗИ, прием отраженных ВЦ и земли сигналов, измерение по сигналам обнаруженной ВЦ неоднозначной задержки τз и смещенной при ЛЧМ доплеровской частоты F, может осуществляться на основе известных технических решений и структурных схем ИД РЛС, например, показанным в прототипе [RU 2221258 С1], в аналоге [RU 2296346], в измерителе дальности на основе ЛЧМ [RU 2237265, 27.09.2004] и др.
В изобретении для достижения вышеуказанного технического эффекта предполагаются следующие действия:
1) На этапе поиска/обнаружения ВЦ излучают последовательность ПЗИ {Пi, i=1, 2, …, N} с априорно заданными ЧПИ Fп i и ЛЧМ, причем:
знак крутизны S в пачках инвертируется по мере реализации всей последовательности ПЗИ, т.е. sign(Si+1)≠sign(Si);
для первой пачки Пi знак и модуль крутизны может назначаться произвольно;
в последующих пачках произвольно может назначаться модуль крутизны.
Примечание: Задающие генераторы современных ИД РЛС обеспечивается изменение знака и дискретное изменение модуля. Например, типичным являются следующие допустимые вариации крутизны: ±2 кГц/мс; ±4 кГц/мс; ±6 кГц/мс; ±12 кГц/мс.
2) После приема отраженных сигналов пачки Пi (i=N) с ЧПИ Fп i,, измерения известными способами значений неоднозначной задержки τз i, смещенной ЛЧМ частоты Fi и их запоминания, излучают еще одну ПЗИ Пi+1 с ЧПИ Fп i+1=Fп i и ЛЧМ со знаком sign(Si+1)≠sign(Si) а после приема отраженных сигналов ПЗИ измеряют текущие значения задержки τз i+1 и смещенной частоты Fi+1;
3) По запомненным Fi и текущим Fi+1 значениям измеренных частот определяют расчетные значения дальномерных частот:
F*i=Fi+Кчпи i Fп i,; F*i+1=Fi+1+Кчпи i+1 Fп i, причем при Si>0 назначаются значения Кчпи i=0 или Кчпи i=1 в зависимости от размещения РЛС (0 - для стационарных РЛС или на носителях с малой скоростью, 1 - для скоростных носителей) и принятой стратегии управления наблюдением сигнала ВЦ - в рамках диапазона [f0; Fп i] или в диапазоне и вне его; при Si<0 назначаются значения Кчпи i=-1 (для стационарных РЛС или движущихся с малой скоростью) или Кчпи i=0 (при высокой скорости РЛС)
и вычисляют скорость сближения V0 и дальность R0 до ВЦ по формулам:
где: λ - длина волны; с - скорость распространения радиоволн; ti+1/i - интервал времени между излучением пачек Пi+1 и Пi;

где: ΔSi+1/i=Si+1/i-Si - синтезированная крутизна;
 ;
;  ;
; 
- переходные коэффициенты для учета разницы моментов излучения (Сi+1/i, Вi+1/i) и относительное приращение крутизны Sотн_i+1/i,.
Если интервал между ПЗИ достаточно длителен, что наблюдается различие дискретных измерений неоднозначных задержек Δτз i/i+1=τз i-τз i+1≠0, то дальность R0 определяется по формуле:

где: ΔFi+1/i=F*i+1-F*i;.
Независимо от формулы, использованной при расчете дальности, на основании полученного значения R0 вычисляют соответствующий ее номер r периода повторения импульсов и с использование текущего измерения неоднозначной задержки τз i+1 определяют точное значение дальности R по известным формулам:

где: Tпi=1/Fпi - период повторения импульсов; int{.} - процедура взятия целой части числа; R*=R0 - дальность, определенная по формуле (2) или (3).
Эффективность предложенного способа проверялась на основе сравнительного аналитического оценивания точности измерения дальности и скорости, имитационного моделирования применения способа типовой самолетной ИД РЛС (Х-диапазона) и в стационарной РЛС такого типа.
В частности, сравнительный анализ потенциальной точности определения дальности предложенным и известным [1] способами измерения дальности по сигналам с ЛЧМ - при равном количестве используемых ПЗИ (2 пачки с одинаковой ЧПИ Fп), при равной точности частотных измерений, одинаковом модуле крутизны ЛЧМ, без учета ошибок из-за разнесения моментов излучения ПЗИ - показывает, что:
абсолютная ошибка δR, дисперсия DδR и СКО  ошибок определения дальности известным способом [1] определяется выражениями [5]
ошибок определения дальности известным способом [1] определяется выражениями [5]
 ,
,  ;
; 
где: δ(ΔF)=δFi+δFд i-1 - абсолютная ошибка определения разности ΔFi=Fi-Fд i-1 смещенной ЛЧМ частоты Fi и доплеровской частоты Fд i-1, включающая соответствующие ошибки частотных измерений δFi и δFд i-1 с дисперсиями [6] DδF=DδFi=DδFд i-1=(Δf)2/12=(Fп/nбпф)2/12; Nбпф - база быстрого преобразования Фурье (БПФ); q - известная константа (из характеристик конкретного задающего генератора), влияющая на точность физической реализации заданной крутизны S, причем дисперсия таких ошибок крутизны DδS=(qS)2. При характеристиках задающих генераторов современных РЛС влияние реализации ошибок крутизны ЛЧМ считается несущественным и, следовательно:

Дальность, определенная предлагаемым способом (формула (2)), при аналогичных условиях и Si+1=-Si, |Si+1|=|Si|=|S|, характеризуется дисперсией и СКО:

Соотношение (6) показывает, в предложенном способе потенциальная точность (по СКО) в сравнении с известным способом [1] улучшается вдвое.
Приближенное соотношение для определения доплеровской частоты, следующее из формулы (1): F0≈F*i[1-(Si/Si+1)]-1-F*i+1[(Si+1/Si)-1]-1.
При Si+1=-Si и |Si+1|=|Si|=|S| оно приобретает вид:
F0≈(1/2)[Fi-Fi+1].
Соответственно, СКО ошибок определения доплеровской частоты ВЦ предлагаемым способом равно, связано с СКО ошибок непосредственного измерения частоты соотношением  . Следовательно, точность по скорости примерно на 30% лучше, чем точность, достижимая при непосредственном измерении доплеровской частоты по немодулированной пачке (что в прототипе и не представляется возможным).
. Следовательно, точность по скорости примерно на 30% лучше, чем точность, достижимая при непосредственном измерении доплеровской частоты по немодулированной пачке (что в прототипе и не представляется возможным).
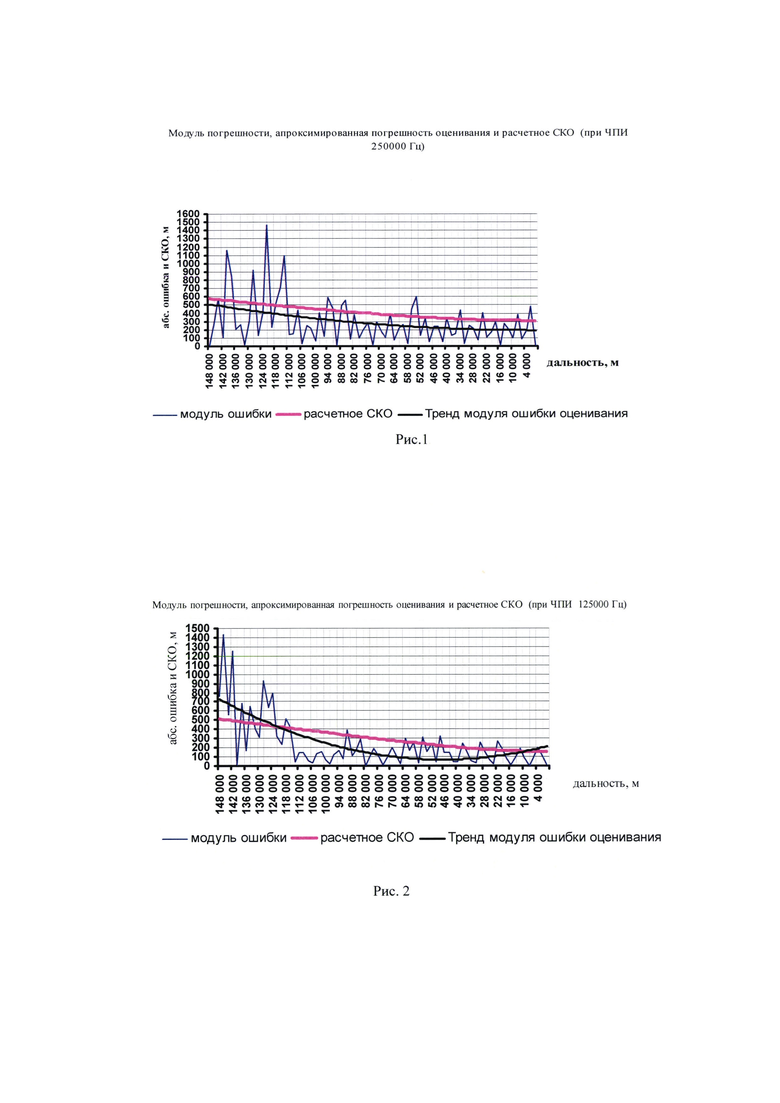
На графиках рис. 1-3 приведены результаты имитационного моделирования измерения дальности по бинарным частотным измерениям при условиях: |S|=12 кГц/мс; Nбпф=1024 и при различных значениях той ЧПИ, на которой происходило обнаружение ВЦ. Результаты показывают, что используя две ПЗИ, заявленный способ обеспечивает разрешение неопределенности по периоду повторения и высокоточное определение дальности (с точностью измерения неоднозначной задержки). Точность способа может быть улучшена путем при рациональном сочетания ЧПИ, крутизны, базы БПФ, а также наращиванием количества используемых пачек.
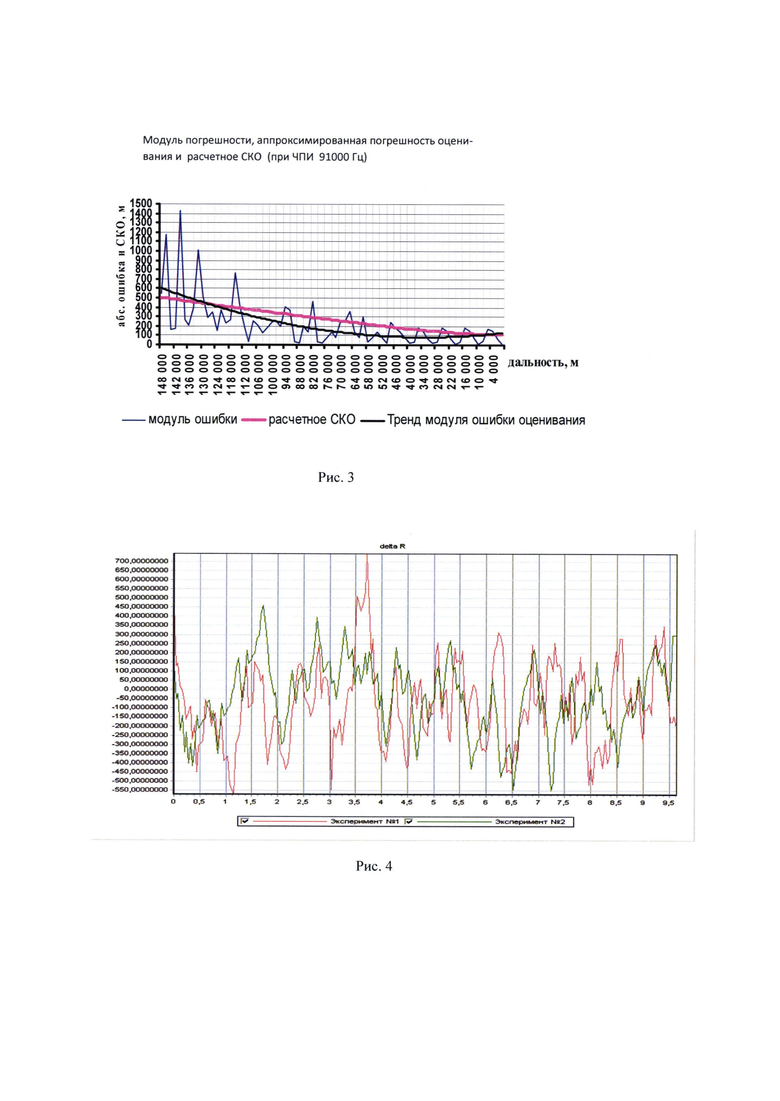
Например, на рис. 4 приведены результаты моделирования, показывающие погрешности по дальности при трех (эксперимент №1) и четырех (эксперимент №2) пачках измерении дальности, начиная с дистанции 100 км при Nбпф=2048 и модуле значения крутизны ЛЧМ 6 кГц/мс.
Таким образом, изобретение позволяет достичь технического эффекта, заключающегося в расширении функциональных возможностей существующих и перспективных образцов ИД РЛС в задачах обнаружения, захвата и сопровождения ВЦ, обеспечивая возможность обнаружения низколетящей малоскоростной цели в режиме ВЧП, не обнаруживаемой известными способами, а также возможности измерения скорости обнаруженной ВЦ и определения дальности:
с повышенной точностью (в сравнении с непосредственным измерением по доплеровской частоте и с известными способами дальнометрии при ВЧП),
без дополнительных требований к времени радиоконтакта с целью и аппаратным средствам ИД РЛС для реализации предлагаемого способа.
Использованные источники информации
(кроме патентов, указанных в тексте описания изобретения)
1. Справочник по радиолокации. Том 3. /Под ред. М. Сколника, Нью-Йорк, 1970. Пер. с англ. (в 4-х томах) // Под общей ред. К.Н. Трофимова. М.: Сов. Радио, 1979.
2. Редди Н.С., Свейми М.Н. Устранение неоднозначности по дальности и доплеровскому смещению частоты в РЛС в РЛС со средней частотой повторения при наличии многочисленных целей, перевод Л-46681, Всесоюзный центр переводов, Москва, 1985.
3. Поттер Н.С. Устранение неоднозначности по дальности в РЛС с высокой частотой повторения, ВРЭ, Серия ОТ, Вып. 11, 1977.
4. Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. / Под ред. Канащенкова А.И. и Меркулова В.И. М.: Радиотехника, 2006. 656 с.
5. Тейлор Дж. Введение в теорию ошибок. Пер. с англ. - М.: Мир. 1985. - 272 с., ил.
6. Применение цифровой обработки сигналов: Пер. с англ. / Под ред. Э. Оппенгейма, пер. под. ред. А.М. Рязанцева. - М.: Мир, 1980. - 550 с.
Изобретение относится к радиолокации воздушных целей (ВЦ) и может быть использовано в импульсно-доплеровских радиолокационных станциях (РЛС). Технический результат – повышение точности обнаружения, измерения дальности и скорости низколетящей малоскоростной цели. Указанный результат достигается за счет того, что способ основан на излучении пачек зондирующих радиоимпульсов (ПЗИ) с заданными частотой повторения импульсов (ЧПИ) и линейной частотной модуляцией (ЛЧМ) несущей частоты, приеме отраженных от цели и земли сигналов, измерении неоднозначной задержки и смещенной при ЛЧМ доплеровской частоты сигнала ВЦ. Текущие и запомненные частотные измерения при необходимости пересчитываются, с учетом возможного изменения индекса ЧПИ, и используются для определения скорости и однозначной дальности. В том случае, если за интервал между ПЗИ, произошло заметное смещение неоднозначной задержки, расчет дальности осуществляется с учетом этого смещения. На основании однозначной дальности определяется номер периода повторения и с учетом текущего измерения неоднозначной задержки определяется точное значение текущей дальности (с точностью измерения задержки). 4 ил.
Способ обнаружения, измерения дальности и скорости низколетящей малоскоростной цели в импульсно-доплеровских радиолокационных станциях (РЛС) при высокой (ВЧП) частоте повторения импульсов (ЧПИ) и инвертируемой линейной частотной модуляцией (ЛЧМ), основанный на излучении пачек зондирующих радиоимпульсов (ПЗИ) с заданной частотой повторения (ЧПИ) Fп - из набора ЧПИ, заранее рассчитанного для раскрытия «слепых» зон обнаружении при ВЧП - и с внутриимпульсной ЛЧМ несущей частоты  приеме отраженных от цели и земли сигналов, измерении по сигналам обнаруженной цели неоднозначной задержки τ3 и смещенной при ЛЧМ доплеровской частоты F,
приеме отраженных от цели и земли сигналов, измерении по сигналам обнаруженной цели неоднозначной задержки τ3 и смещенной при ЛЧМ доплеровской частоты F,
отличающийся тем, что:
при поиске и обнаружении излучают последовательность ПЗИ {Пi,i = 1, 2, …, N} с заданными ЧПИ Fп i и ЛЧМ, причем знаки крутизны в последовательности ПЗИ 
после приема отраженных сигналов пачки Пi (i=N) с ЧПИ Fп i, на которой произошло обнаружение воздушной цели (ВЦ), измерения и запоминания значений задержки τз i и смещенной частоты Fi излучают еще одну ПЗИ Пi+1 с ЧПИ Fп i+1=Fп i и ЛЧМ с инвертированным знаком  измеряют значения задержки τpз i+1 и смещенной частоты Fi+1, по запомненным Fi и текущим Fi+1 значениям измеренных частот определяют расчетные значения дальномерных частот с учетом индекса ЧПИ
измеряют значения задержки τpз i+1 и смещенной частоты Fi+1, по запомненным Fi и текущим Fi+1 значениям измеренных частот определяют расчетные значения дальномерных частот с учетом индекса ЧПИ
причем при S>0 назначают значения Кчпи=0 или Кчпи=1 в зависимости от размещения РЛС (0 - для стационарных РЛС или на носителях с малой скоростью, 1 - для скоростных носителей); при S<0 и аналогичных условиях назначают значения Kчпи=-1 или Kчпи i=0 и вычисляют скорость сближения V0 и дальность R0 до ВЦ по формулам
где λ - длина волны; с - скорость распространения радиоволн; tt+1/i - интервал времени между излучением пачек Пi+1 и Пi;

где ΔS+1/i=Si+1/i -Si - синтезированная крутизна;

- переходные коэффициенты для учета разницы моментов излучения (Сi+1/i,, Вi+i/i) и относительное приращение крутизны S отн_i+1/i,
по текущим и запомненным неоднозначным задержкам проверяют различие дискретных измерений задержек  , и если такое различие существует, то дальность R0 определяют по формуле
, и если такое различие существует, то дальность R0 определяют по формуле

где 
и на основании значения R0, оставшегося после проверки различия дискретных измерений задержек, и с использованием текущего измерения неоднозначной задержки τз i+1 определяют значение дальности R до цели с точностью измерения неоднозначной задержки по формуле
где
Тп=1/Fпi - период повторения импульсов;
 - номер периода повторения; int{.} - процедура взятия целой части числа, заключенного в скобки.
- номер периода повторения; int{.} - процедура взятия целой части числа, заключенного в скобки.
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО НЕСКОЛЬКИХ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКИМИ РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ СО СРЕДНЕЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2002 |
|
RU2221258C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2040008C1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| Металлическая вентиляционная печь | 1929 |
|
SU18907A1 |
| US 6606052 B1, 12.08.2003 | |||
| US 5731778 A, 24.03.1998 | |||
| EP 693694 B1, 15.09.1999. | |||

