Изобретение относится к области электрификации железных дорог, а именно к компенсирующим устройствам проводов контактных подвесок.
Наиболее близким к заявленному является управляемый компенсатор контактной подвески, содержащий связанную с анкерной опорой блочно-полиспастную систему, соединенную с одной стороны с компенсируемым проводом, а с другой - с гирляндой свободно лежащих друг на друге отдельных грузов, установленный на анкерной опоре и связанный с системой управления подъемно-опускающий механизм, соединенный со свободно подвешенной цепью, которая располагается над закрепленной на верхней части гирлянды емкостью с возможностью увеличения веса гирлянды за счет опускания звеньев цепи в указанную емкость, при этом на компенсируемом проводе вблизи анкерной опоры установлен датчик натяжения, выход которого соединен со входом системы управления (Пат. №2779402 на изобретение (РФ), МПК В60М 1/26. Управляемый компенсатор контактной подвески / О. А. Сидоров, А. Н. Смердин, М. С. Михайлов (РФ). - №2022106967; Заявлено 16.03.2022; Опубл. 06.09.2022. Бюл. №25).
Недостатком известного управляемого компенсатора контактной подвески является низкая точность регулирования натяжения компенсируемого провода, поскольку система управления натяжением получает информацию от единственного датчика натяжения, расположенного вблизи анкерной опоры, и не учитывает отклонение натяжения компенсируемого провода вдоль анкерного участка, возникающего из-за влияния на контактную подвеску климатических (колебания температуры окружающей среды, осадки, наличие гололеда и ветровые воздействия) и конструктивных (силы трения в узлах крепления фиксирующих и поддерживающих устройств) факторов. По мере удаления от места компенсации влияние указанных факторов достигает наибольшего накопительного эффекта, в результате чего натяжение компенсируемого провода в средней части анкерного участка будет всегда ниже, чем по его краям. Поскольку в известном устройстве управляемого компенсатора единственный датчик натяжения компенсируемого провода расположен возле места компенсации вблизи анкерной опоры, то регулирование натяжения компенсируемого провода происходит на основе неполных данных, что не позволяет подготовить анкерный участок к проходу электроподвижного состава, что приведет ухудшению качества токосъема. Перенос единственного датчика натяжения в середину анкерного участка также не может решить проблему регулирования натяжения так как при этом установка в середине анкерного участка требуемого системой управления значения натяжения без учета возможности контроля параметра натяжения по его краям может привести к превышению максимальной нагрузки на растяжение, действующей на компенсируемый провод по краям анкерного участка, а следовательно к разрушению и обрыву компенсируемого провода, выходу из строя анкерного участка и нарушению электроснабжения в его пределах.
Целью изобретения является повышение точности регулирования натяжения компенсируемого провода.
Указанная цель достигается тем, что известное устройство управляемого компенсатора анкерного участка контактной подвески, содержащее связанную с анкерной опорой блочно-полиспастную систему, соединенную с одной стороны с компенсируемым проводом, а с другой - с гирляндой свободно лежащих друг на друге отдельных грузов, установленный на анкерной опоре и связанный с системой управления подъемно-опускающий механизм, соединенный со свободно-подвешенной цепью, которая располагается над закрепленной на верхней части гирлянды грузов емкостью с возможностью увеличения веса гирлянды грузов за счет опускания звеньев цепи в указанную емкость, при этом на компенсируемом проводе вблизи анкерной опоры установлен датчик натяжения, выход которого соединен со входом системы управления, оснащено установленным в средней части анкерного участка дополнительным датчиком натяжения компенсируемого провода, выход которого соединен со входом системы управления.
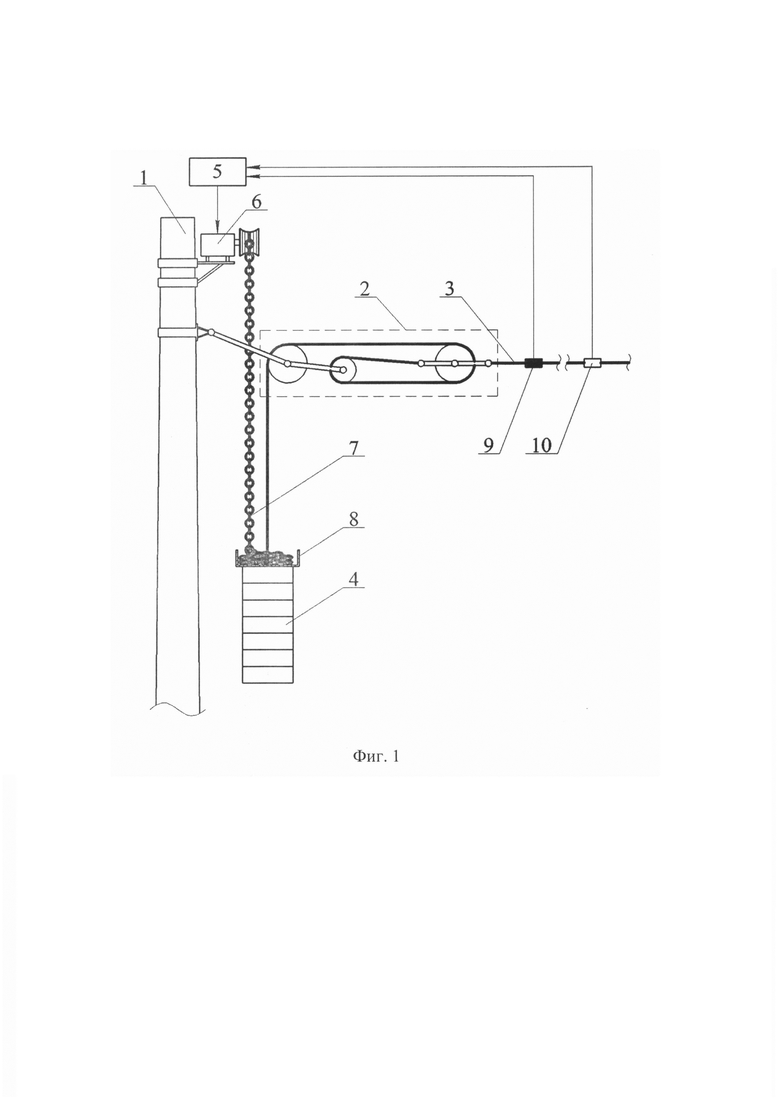
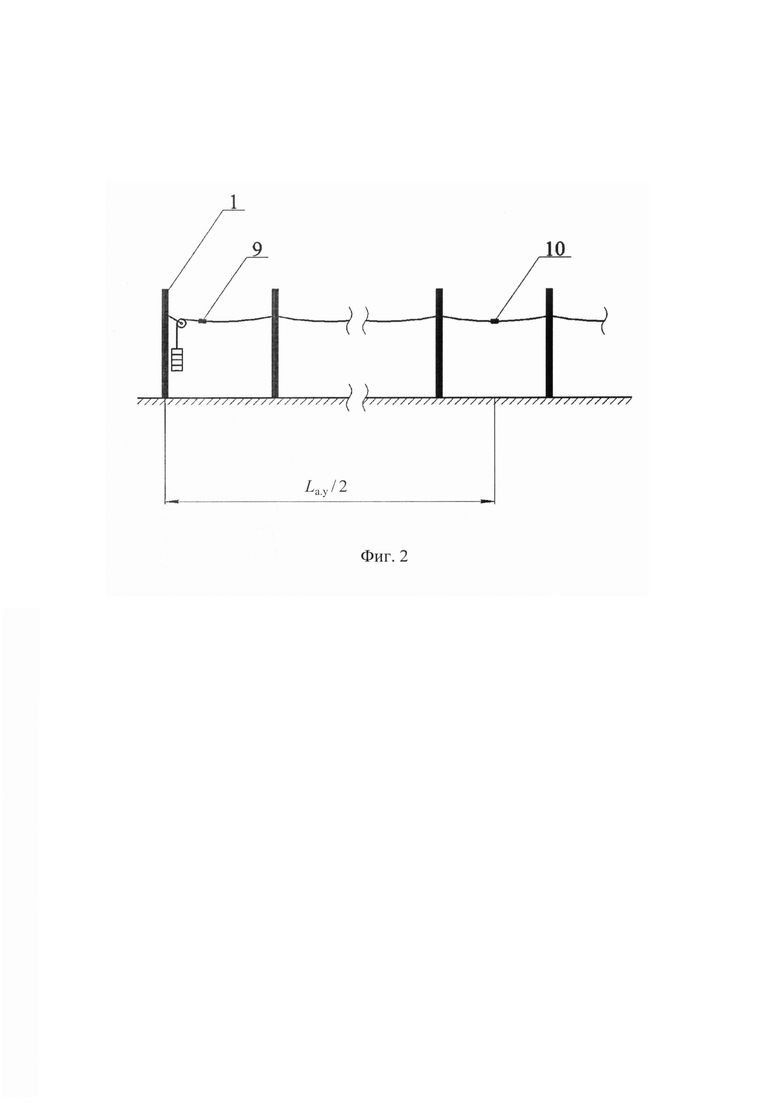
На фиг.1 представлена схема управляемого компенсатора анкерного участка контактной подвески; на фиг.2 - схема расположения датчиков натяжения вдоль анкерного участка, где La.y - длина анкерного участка.
Управляемый компенсатор анкерного участка контактной подвески содержит связанную с анкерной опорой 1 блочно-полиспастную систему 2, соединенную с одной стороны с компенсируемым проводом 3, а с другой - с гирляндой свободно лежащих друг на друге отдельных грузов 4, установленный на анкерной опоре 1 и связанный с системой управления 5 подъемно-опускающий механизм 6, соединенный со свободно-подвешенной цепью 7, которая располагается над закрепленной на верхней части гирлянды грузов 4 емкостью 8 с возможностью увеличения веса гирлянды грузов 4 за счет опускания звеньев цепи 7 в указанную емкость 8, при этом на компенсируемом проводе 3 вблизи анкерной опоры 1 и в средней части анкерного участка установлены соответственно датчики натяжения 9 и 10, выходы которых соединены со входами системы управления 5.
Управляемый компенсатор анкерного участка контактной подвески работает следующим образом.
Натяжение компенсируемого провода 3 создается под действием веса гирлянды грузов 4 и массы звеньев свободно подвешенной цепи 7, опущенной в емкость 8, и передается на компенсируемый провод 3 через блочно-полиспастную систему 2, установленную на анкерной опоре 1. Натяжение компенсируемого провода 3 определяется массой гирлянды грузов 4, массой звеньев свободно подвешенной цепи 7, опущенных в емкость 8 и конфигурацией блочно-полиспастной системы 2. Компенсация температурных удлинений компенсируемого провода 3 обеспечивается за счет вертикального перемещения гирлянды грузов 4. Регулирование натяжения компенсируемого провода 3 происходит за счет изменения массы звеньев свободно подвешенной цепи 7 в емкости 8 при помощи подъемно-опускающего механизма 6, управляемого посредством системы управления 5, на входы которой с датчиков натяжения 9 и 10, расположенных соответственно вблизи анкерной опоры 1 и в средней части анкерного участка, поступает информация о величине натяжения компенсируемого провода 3. При необходимости повышения величины натяжения компенсируемого провода 3 система управления 5 передает сигнал подъемно-опускающему механизму 6 об опускании звеньев цепи 7 в емкость 8, а при необходимости его снижения - сигнал о подъеме звеньев цепи 7 из емкости 8.
Использование предлагаемого управляемого компенсатора анкерного участка контактной подвески позволит повысить точность регулирования натяжения компенсируемого провода за счет контроля системой управления параметров натяжения компенсируемого провода по краям и в средней части анкерного участка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый компенсатор контактной подвески | 2022 |
|
RU2779402C1 |
| Компенсатор контактной подвески | 2022 |
|
RU2779403C1 |
| УСТРОЙСТВО АНКЕРОВКИ КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2003 |
|
RU2250841C2 |
| Устройство компенсации температурных удлинений проводов контактной подвески железной дороги | 2017 |
|
RU2669186C1 |
| КОМПЕНСАТОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2193981C2 |
| КОМПЕНСАТОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2013 |
|
RU2540689C1 |
| Система и способ непрерывного мониторинга состояния контактной сети рельсового транспорта | 2018 |
|
RU2701887C1 |
| СПОСОБ МОНТАЖА ИЛИ ДЕМОНТАЖА КОНТАКТНОЙ ПОДВЕСКИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 1994 |
|
RU2088434C1 |
| КОМПЕНСАТОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2002 |
|
RU2235027C2 |
| ВСЕСОЮЗНАЯ j | 1973 |
|
SU370089A1 |
Изобретение относится к компенсирующим устройствам для изменения длины контактных проводов. Управляемый компенсатор анкерного участка контактной подвески содержит связанную с анкерной опорой блочно-полиспастную систему, соединенную с одной стороны с компенсируемым проводом, а с другой - с гирляндой свободно лежащих друг на друге отдельных грузов. На анкерной опоре установлен связанный с системой управления подъемно-опускающий механизм, соединенный со свободно подвешенной цепью, которая располагается над закрепленной на верхней части гирлянды грузов емкостью с возможностью увеличения веса гирлянды грузов за счет опускания звеньев цепи в указанную емкость. При этом на компенсируемом проводе вблизи анкерной опоры установлен датчик натяжения, выход которого соединен с входом системы управления. В средней части анкерного участка установлен дополнительный датчик натяжения компенсируемого провода, выход которого соединен с входом системы управления. Технический результат заключается в повышении точности регулирования натяжения компенсируемого провода. 2 ил.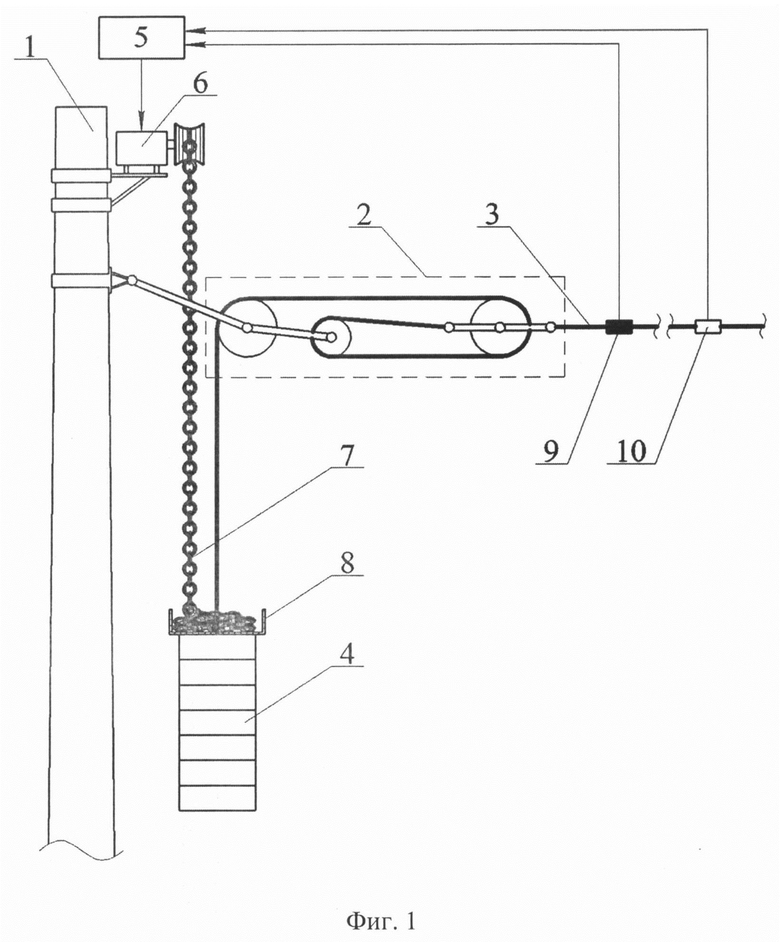
Управляемый компенсатор анкерного участка контактной подвески, содержащий связанную с анкерной опорой блочно-полиспастную систему, соединенную с одной стороны с компенсируемым проводом, а с другой - с гирляндой свободно лежащих друг на друге отдельных грузов, установленный на анкерной опоре и связанный с системой управления подъемно-опускающий механизм, соединенный со свободно подвешенной цепью, которая располагается над закрепленной на верхней части гирлянды грузов емкостью с возможностью увеличения веса гирлянды грузов за счет опускания звеньев цепи в указанную емкость, при этом на компенсируемом проводе вблизи анкерной опоры установлен датчик натяжения, выход которого соединен со входом системы управления, отличающийся тем, что он оснащен установленным в средней части анкерного участка дополнительным датчиком натяжения компенсируемого провода, выход которого соединен со входом системы управления.
| Управляемый компенсатор контактной подвески | 2022 |
|
RU2779402C1 |
| 0 |
|
SU155217A1 | |
| Реле с разрезным якорем | 1935 |
|
SU44286A1 |
| KR 101997100 B1, 05.07.2019. | |||
