Настоящее изобретение в целом относится к системе для определения местоположения с помощью направляющей энергетической цепи для динамического направления линий питания, таких как кабели, шланги или т.п.
Направляющие энергетические цепи обычно собираются из звеньев цепи, шарнирно соединяемых в продольном направлении и обеспечивающих пространство для размещения линии питания. При перемещении они обычно образуют первый участок, который на своем конце прикрепляется к точке соединения, и второй подвижный участок, который на своем конце прикрепляется к перемещающемуся концу, причем указанный перемещающийся конец выполнен с возможностью смещения или перемещения, в частности, линейного перемещения вперед и назад по маршруту. Между этими участками направляющая энергетическая цепь образует совместно движущуюся провисающую дугу.
В частности, настоящее изобретение относится к системе для определения местоположения, имеющей такую обычную направляющую энергетическую цепь, в которой на перемещающемся конце установлено датчиковое устройство, выполненное с возможностью определения местоположения. Помимо этого, в данном случае конструкция направляющей энергетической цепи или звеньев цепи в принципе несущественна.
В WO 2014/102170 A1 описана направляющая энергетическая цепь для длинных путей перемещения, содержащая приводное устройство, поддерживающее перемещаемый участок и управляемое управляющим блоком для уменьшения напряжения этой направляющей энергетической цепи, в частности, растягивающей и сгибающей силами. В одном примерном варианте осуществления предложен датчик перемещения, присоединенный к управляющему блоку для определения пути перемещения для того, чтобы управлять приводящим или тормозящим действием приводного устройства. Датчик перемещения обнаруживает перемещение подвижной области соединения, но определение местоположения здесь не предложено. В принципе, такой датчик перемещения может быть использован для определения местоположения. Однако при использовании роликового датчика круговых перемещений, как представлено в качестве примера в WO 2014/102170 A1, невозможно устранить проскальзывание, что означает, что надежное определение местоположения в значительной степени недостижимо.
В одном аспекте WO 2018/115528 A1 предложен датчиковый модуль, который размещается в концевой области подвижного участка или на перемещающемся конце для количественного определения кинематической переменной. Например, в качестве указанного датчика предложен трехкоординатный датчик ускорения. Такой датчик ускорения делает возможным определение пути или расстояния перемещения, пройденного во время работы. Кроме того, такой датчиковый модуль также обеспечивает возможность определения мгновенного местоположения посредством отслеживания перемещения с течением времени, например, посредством подходящей обработки сигналов и, в принципе, не очень подвержен неисправностям.
В дополнительном аспекте WO 2018/115528 A1 (ср. фиг. 1А и фиг. 2 указанного документа) используются распределенные световые завесы или бесконтактные переключатели, которые обеспечивают только нечеткое и приблизительное представление о местоположении или пространственном расположении направляющей энергетической цепи. Это же относится к приспособлению со световыми завесами, раскрытом в DE 20 2018 101942 U1 или опубликованном впоследствии WO 2019/197284 A1 (фиг. 5A указанного документа).
С помощью обоих подходов постоянное надежное определение местоположения перемещающегося конца или движущейся точки соединения машины или установки во время работы может быть достигнуто только в ограниченной степени. Среди прочего они предлагают только ограниченную точность определения местоположения, поскольку с течением времени суммируются отклонения определенного относительного местоположения, происходящие, например, из-за проскальзывания или относительных ошибок измерения. Кроме того, изложенные выше подходы не обеспечивают получение информации о текущем абсолютном местоположении в состоянии ожидания или при повторной инициализации.
Следовательно, первая задача настоящего изобретения состоит в предложении улучшенной системы для определения местоположения с помощью направляющей энергетической цепи, которая надежна в работе и может быть установлена на месте использования с наименьшими возможными усилиями. Предпочтительно, она предназначена для обеспечения более надежного и/или более точного определения абсолютного местоположения в процессе работы. Однако в настоящем случае определение местоположения не обязательно означает измерение в метрологических терминах, но количественное определение или обнаружение местоположения перемещающегося конца.
Предполагается, что предложенное решение является универсальным и, в частности, интегрируемым в систему управления подвижной части машины или установки (далее для краткости обозначаемой как часть машины), питаемой направляющей энергетической цепью. В частности, предполагается, что предложенная система также выполнена с возможностью замены существующих или известных отдельных систем для определения местоположения.
В частности, настоящее изобретение относится к одномерному, то есть 1D определению или обнаружению местоположения перемещающегося конца или перемещаемой части машины по линейному маршруту, то есть по отношению к воображаемой линии.
В первом аспекте или подходе для решения указанной проблемы настоящее изобретение относится к направляющей энергетической цепи, оборудованной направляющим приспособлением с направляющими компонентами, расположенными вдоль маршрута для направления в боковом направлении указанной направляющей энергетической цепи во время перемещения. Известно, что для этой цели обычно используются направляющие каналы с противоположными частями боковой стенки, однако также могут рассматриваться другие конструкции. Такие направляющие приспособления используют для длинных путей перемещения, составляющих 5 м или более, обычно более 10 м для того, чтобы предотвращать нежелательные боковые перемещения.
В первом аспекте настоящего изобретения предложено, что по меньшей мере некоторые из направляющих компонентов направляющего приспособления содержат по меньшей мере один контрольный компонент, который служит в качестве указателя местоположения для датчикового устройства. Таким образом, датчиковое устройство может взаимодействовать с такими отдельными контрольными компонентами для достижения сравнительно надежного и устойчивого к ошибкам определения местоположения.
Благодаря использованию контрольных компонентов можно ограничивать влияние относительных разностей или определение относительного местоположения отдельными продольными участками пути перемещения. Таким образом, контрольные компоненты, расположенные на направляющем приспособлении, подобно буям, маякам или вехам могут использоваться для лучшего и более надежного определения текущего местоположения, в частности, абсолютного местоположения.
Контрольный компонент может быть прикреплен к соответствующему направляющему компоненту либо в виде отдельного компонента, при необходимости также выполненного с возможностью отделения для целей обслуживания, либо может быть изготовлен в виде выполненного за одно целое компонента указанного направляющего компонента. В обоих случаях контрольные компоненты выполнены неподвижно на соответствующем направляющем компоненте.
На основе известного и зафиксированного в пространстве по отношению к несущей конструкции местоположения компонентов направляющего приспособления, например, отдельных частей боковой стенки или направляющих элементов нижней части, расположение и местоположение предусмотренных на них контрольных компонентов по существу также жестко задано и заранее определено или выполнено с возможностью определения в качестве абсолютного местоположения.
Во втором аспекте или подходе для решения указанной проблемы также могут быть использованы направляющие энергетические цепи без дополнительного направляющего приспособления.
Во втором аспекте настоящего изобретения предложено, что в дополнение к датчиковому устройству, расположенному на перемещающемся конце, на неподвижной точке соединения неподвижно установлено дополнительное второе датчиковое устройство для определения местоположения, и что по меньшей мере каждое n-ое звено цепи имеет по меньшей мере один контрольный компонент, установленный на указанном звене цепи или прикрепленный к нему или выполненный за одно целое с ним. В результате, в зависимости от местоположения движения перемещающегося конца или перемещаемого участка по маршруту, либо первое датчиковое устройство, либо второе датчиковое устройство может взаимодействовать с отдельными контрольными компонентами звеньев цепи и осуществлять сравнительно надежное или устойчивое к ошибкам определение местоположения, в частности, перемещаемого конца или, при необходимости, также направляющей энергетической цепи в целом. В этом случае сама направляющая энергетическая цепь может служить в качестве материальной меры или своего рода измерительной ленты, а местоположение может быть определено как местоположение относительно текущего положения направляющей энергетической цепи.
В качестве решений для определения или установления местоположения или отслеживания местоположения перемещаемой части установки/машины, питаемой этой энергетической цепью, могут быть использованы оба подхода. По существу не требуется никаких дополнительных усилий по установке, в частности, по сравнению со специально предназначенной обычной системой позиционирования для любой из двух изложенных выше концепций, поскольку контрольные компоненты устанавливаются вместе с предназначенной направляющей энергетической цепью или ее направляющим приспособлением.
В течение срока службы первый подход позволяет выполнять в целом более точное определение, в частности, также непосредственно для получения абсолютного местоположения, и, кроме того, на очень длинных путях перемещения.
Второй подход в первую очередь позволяет выполнять определение относительного местоположения по отношению к звеньям цепи, то есть длине цепи. Однако благодаря известной длине цепи и номинальному ходу также можно определять информацию о текущем относительном местоположении или также об абсолютном местоположении перемещающегося конца. В этом подходе существующий компонент звена цепи, например, поперечина, при необходимости может использоваться в качестве контрольного компонента, также при необходимости, без дополнительных конструктивных признаков, поскольку его местоположение на звене цепи заранее определено конструктивно.
Оба подхода допускают взаимодействие контрольных компонентов с датчиковым устройством в состоянии покоя, то есть при простое, и при движении направляющей энергетической цепи по маршруту. Оба подхода могут быть осуществлены надежно с относительно небольшими усилиями. По сравнению с обычными специальными системами для определения местоположения, оба подхода предлагают значительную экономию на установке, поскольку система по существу выполнена с возможностью установки совместно с направляющей энергетической цепью или ее направляющим приспособлением. Кроме того, оба подхода являются особенно преимущественными для длинных путей перемещения, то есть систем большой длины, например, >10 м.
Предпочтительно линейный маршрут может проходить горизонтально и иметь общую длину, составляющую по меньшей мере 5 м, обычно >>10 м и до >100 метров. Чем длиннее маршрут перемещаемой части машины, тем больше экономия усилий при установке, предлагаемая настоящим изобретением, в частности, по сравнению с известными системами позиционирования, такими как, например, система для определения текущего абсолютного местоположения крановой тележки, как это типично, например, для козловых контейнерных кранов.
В предпочтительном варианте осуществления датчиковое устройство взаимодействует бесконтактным способом с отдельными контрольными компонентами таким образом, что обычно не возникает явления износа или достигается увеличенный срок службы. В частности, это может быть достигнуто посредством электромагнитных датчиковых систем, предпочтительно, при помощи радиосвязи, или посредством оптических датчиковых систем. Также возможны акустические датчиковые системы, предпочтительно, с использованием ультразвука. В принципе, между датчиковым устройством и отдельными контрольными компонентами может быть использован любой вид распространения волн в свободном пространстве, обеспечивающий возможность определения или измерения расстояния.
Контрольные компоненты могут быть расположены на направляющем приспособлении или звеньях цепи на заранее определенном, в частности, с равными интервалами, расстоянии по отношению к продольному направлению маршрута таким образом, что каждое контрольное местоположение обеспечивает ясное указание на расстояние от начальной или конечной точки маршрута.
Независимо от этого расположения, для надежного определения абсолютного местоположения для каждого контрольного компонента преимущественным является наличие уникального идентификатора, который может быть связан с местоположением, в частности, зависящим от применения абсолютным местоположением, по маршруту, например, в ходе контрольного участка или во время инициализации и обучения системы.
Определение местоположение на основе радиосвязи является преимущественным для наружных применений и менее восприимчивым к погодным условиям. Здесь контрольный компонент может быть выполнен в виде радиосхемы, выполненной с возможностью передачи, а датчиковое устройство может иметь соответствующий приемник. В принципе, обратное расположение также будет находиться в пределах объема настоящего изобретения, но потребует больших усилий по прокладке кабеля или передаче сигнала.
Радиосигналы имеют три основные характеристики, обеспечивающие возможность измерения расстояния, а именно уровень сигнала, время пролета и направление падения. В предпочтительных вариантах осуществления предпочтительной является латерация (lateration) или одномерное определение, и, следовательно, используемые способы измерения расстояния предпочтительно основаны на времени пролета (TOF, time of flight) и/или уровне принимаемого сигнала (RSS, received signal strength), то есть на одной из следующих характеристик:
i) Время пролета (TOF): расстояние между передатчиком и приемником соответствует времени пролета электромагнитного передаваемого сигнала. Расстояние может быть определено из измерения времени прихода (TOA, time of arrival) сигнала на приемник с помощью известного времени передачи (начальное время) или из разности времени приема в различных местоположениях (разность времени прихода). Фаза принятого сигнала или фаза прихода (POA, phase of arrival) может рассматриваться выражением времени пролета;
и/или
ii) Уровень принимаемого сигнала (RSS). Плотность мощности электромагнитной волны обратно пропорциональна квадрату расстояния от источника. Если мощность передачи известна или задана, из измерений уровня сигнала можно оценить это расстояние.
Для определения одномерного расстояния можно выполнять простую латерацию; если известно предыдущее местоположение (местоположения), для определения местоположения вдоль маршрута размещение множества контрольных компонентов не требуется.
Подробности реализации или измерительной технологии не являются важными для настоящего изобретения, можно использовать любую подходящую технологию, известную специалисту в данной области техники. В отношении измерения расстояния на основе радиосвязи сделана ссылка на следующее учебное пособие: Бенски, Алан (2016) "Технологии и применения беспроводного позиционирования" (2-е издание; издатель: Artech House Publishers; ISBN-10: 1608079511). Например, компания BTG Positioning Systems (NL-3261 LB, Нидерланды) предлагает подходящую технологию на основе радиосвязи под названием "RFM1.2".
Благодаря использованию контрольного компонента на основе радиосвязи или радиокомпонента в виде пассивной радиосхемы, предпочтительно, пассивного транспондера, в частности, RFID транспондера, может быть получено энергосберегающее решение, включающее в себя небольшие усилия по прокладке кабелей. В частности, такие радиосхемы могут питаться радиомощностью от опрашивающего передатчика датчикового устройства и в этом случае не требуют собственного источника питания, то есть также не требуют линии питания.
Альтернативно, контрольные компоненты также могут быть выполнены в виде активных радиосхем, в частности, проводных радиосхем. Например, это способствует синхронизации всех контрольных компонентов с системным временем для отправки временных меток для измерения времени пролета в датчиковом устройстве.
Датчиковое устройство может быть выполнено в виде приемопередатчика для пассивных контрольных радиосигналов, например, подобного RFID считывателю, или также простого приемника для активных контрольных радиосигналов, например, в том случае, когда активные контрольные радиосигналы спонтанно передают радиосигналы без опроса, например, содержащие временные метки передачи и/или идентификатор контрольного компонента.
При активных или пассивных радиокомпонентах, предусмотренных в качестве указателей местоположения, каждое датчиковое устройство имеет антенное приспособление, подходящее для используемой технологии радиосвязи. Указанное приспособление предпочтительно имеет такие размеры, что по меньшей мере один радиокомпонент расположен в эффективном диапазоне приема этого антенного приспособления в каждом положении движения по маршруту.
Используемые радиокомпоненты предпочтительно работают в частотном диапазоне IFM. Может быть использована любая распространенная технология радиосвязи, например технология WLAN/WiFi в соответствии с семейством протоколов IEEE 802.11, которая особенно подходит для измерения времени прихода (TOA), или, конечно, технологии Bluetooth и ZigBee в соответствии с семейством протоколов IEEE 802.15, которые особенно подходят для измерения уровня принимаемого сигнала (RSS). Однако предпочтительно используется энергосберегающее решение, такое как RFID или Bluetooth с низким энергопотреблением (BLE, Bluetooth Low Energy). Даже без дополнительных мер с помощью только контрольных радиокомпонентов может быть достигнута точность в сантиметровом диапазоне.
Альтернативно или в дополнение к технологии радиосвязи контрольные компоненты также могут представлять собой оптическую и/или электромагнитную, например, индуктивную или емкостную, читаемую разметку, в частности кодированную или кодовую разметку, например, со структурой штрих-кода. Такая разметка предпочтительно служит в качестве материальной меры и может быть обнаружена с использованием оптического и/или электромагнитного датчика датчикового устройства, например, посредством бесконтактного сканирования. Обнаружение на основе считывания или сканирования маркеров, например, маркерная дорожка, является очень надежным и может обеспечивать повышенную точность, в частности, в случае фотоэлектрического сканирования с помощью фотодетекторов или световых датчиков, оптических детекторов, оптоэлектронных датчиков или т.п. Может рассматриваться кодированная разметка, например, представляющая собой систему кодирования местоположения, содержащую кодирующую направляющую с оптическим сканированием, как, например, доступная под названием «WCS» от компании Pepperl + Fuchs (DE-68307 Mannheim, Германия). Здесь кодирующая дорожка, выполненная на основе принципа такой кодирующей направляющей, может быть предпочтительно включена в качестве выполненного за одно целое компонента посредством выемок, выполненных в части боковой стенки направляющего канала, например, при помощи надлежащей последующей механической обработки. Однако даже простая перфорированная полоса или дорожка без кодирования, например, с постоянным интервалом между отверстиями, обеспечивает возможность относительно точного определения абсолютного местоположения и является более простой в производстве.
Для достижения еще более точного определения местоположения и одновременного уменьшения относительных ошибок измерения посредством привязывания для расстояния между двумя контрольными радиокомпонентами также может быть предусмотрено комплиментарное дополнительное относительное измерение с помощью инкрементного или абсолютного шифратора. Разметка может быть менее чувствительна к электромагнитным помехам и, при необходимости, подобно решениям на основе радиосвязи, также может использоваться в условиях неблагоприятной окружающей среды.
В предпочтительном варианте осуществления первого аспекта, содержащего направляющее приспособление, последнее выполнено в виде направляющего канала, который содержит части боковой стенки. Такие части боковой стенки расположены неподвижно в продольном направлении и в непрерывной последовательности по обеим сторонам вдоль маршрута. Здесь в каждом случае две противоположные части боковой стенки образуют часть этого направляющего канала. Таким образом, по меньшей мере один контрольный компонент предпочтительно выполнен по меньшей мере на каждой n-ой части боковой стенки, в частности, на каждой части боковой стенки, одной стороны направляющего канала. Таким образом, части боковой стенки, жестко установленные на несущей конструкции, зависящей от применения, могут быть использованы в качестве опор для контрольных компонентов таким образом, что последние по существу устанавливаются за один этап вместе с этими частями боковой стенки.
В принципе, контрольные компоненты предпочтительно прикреплены на определенном регулярном расстоянии к направляющему приспособлению распределенным образом по маршруту.
Если направляющее приспособление сконструировано в виде направляющего канала из частей боковой стенки, предпочтительно, по существу идентичной конструкции, установленных в продольном направлении, на каждой части боковой стенки предпочтительно выполнен по меньшей мере один контрольный компонент, например, при изготовлении этих частей боковой стенки выполнена разметка, или прикреплен, например, установленный радиокомпонент.
В одном варианте осуществления в дополнение к метке на части боковой стенки на ней может быть предусмотрен дополнительный контрольный компонент. Тогда датчиковое устройство может, в частности, содержать инкрементный датчик, который взаимодействует с разметочной дорожкой посредством сканирования, например, оптического сканирования, и антенное приспособление, которое считывает идентификатор радиокомпонента для получения информации об абсолютном местоположении.
Части боковых стенок предпочтительно выполнены в виде металлических профилей, в частности, алюминиевых профилей или профилей из листовой стали, имеющих идентичную основную форму и профиль поперечного сечения с функциями крепления. Также возможны части боковой стенки, выполненные из пластмассы. На верхней половине части боковой стенки предпочтительно предусмотрена метка в виде контрольного компонента, в частности в виде разметочной дорожки, которая может быть обнаружена снаружи, например, как кодирующая дорожка типа структуры штрих-кода. Такая метка может быть предусмотрена на части боковой стенки или включена в нее, например, при помощи углубления в материале профиля (механическая обработка), нанесения краски, лазерной печати или т.п. Применение отдельно изготовленной кодирующей дорожки также находится в пределах объема настоящего изобретения.
Соответственно, настоящее изобретение также относится к части боковой стенки направляющего канала для направляющей энергетической цепи, причем часть боковой стенки отличается тем, что на указанной части боковой стенки предусмотрен по меньшей мере один неподвижный контрольный компонент, в частности, радиокомпонент или выполненная с возможностью оптического и/или электромагнитного обнаружения разметка, а указанный контрольный компонент выполнен с возможностью взаимодействия в качестве указателя местоположения с датчиковым устройством для определения местоположения.
В качестве альтернативы направляющим каналам с частями боковой стенки также возможны направляющие приспособления, имеющие в качестве своих направляющих компонентов прикрепленные направляющие элементы нижней части, распределенные с заранее определенным соответственном расстоянием вдоль маршрута, то есть без непрерывных боковых стенок для обоих участков. Заявитель (igus GmbH - D-51147 Кельн) предлагает такие направляющие под торговой маркой "Autoglide" или "Guidelite". Даже при распределении направляющих таким способом по меньшей мере каждый n-ый направляющий элемент нижней части, в частности, каждый направляющий элемент нижней части, расположенный на одной стороне, может содержать контрольный компонент, предпочтительно радиокомпонент.
Если направляющее приспособление не присутствует, то в соответствии со вторым аспектом каждый контрольный компонент может быть прикреплен к звену энергетической цепи. В одном варианте осуществления контрольный компонент может содержать поперечину звена цепи или может быть прикреплен к поперечине звена цепи или выполнен за одно целое с ней. Также в этом случае контрольный компонент может быть реализован в виде выполненной с возможностью оптического и/или электромагнитного обнаружения разметки, в частности, кодовой разметки, или в виде радиокомпонента, предпочтительно, пассивного радиокомпонента.
Предложенная система для определения местоположения может использоваться, в частности, системой управления машины или установки, питаемой этой энергетической цепью. Таким образом, для управления перемещением подвижной части машины, содержащей перемещающийся конец, предпочтительно предусмотрена система управления установки, причем для определения местоположения указанной подвижной части машины эта система управления соединена с датчиковым устройством системы для сигнализации.
Настоящее изобретение подходит не только, но, в частности, также для использования в кране, в частности, в козловом кране или мостовом кране, в котором используется крановая тележка с относительно длинным путем линейного перемещения, такой как, например, тележка, используемая на козловом контейнерном кране или т.п. В этом случае крановая тележка обычно соединена на перемещающемся конце с направляющей энергетической цепью, например, для подачи питания на распределитель контейнеров и управления его приводом, при этом кран имеет систему управления, соединенную с датчиковым устройством для сигнализации, которая устанавливает или отслеживает местоположение крановой тележки на основе определения местоположения в соответствии с настоящим изобретением и, при необходимости, на основе этого управляет ее перемещением.
В частности, предложенная система для определения местоположения может использоваться предпочтительно в сочетании с силоизмерительной системой для измерения силы в зависимости от местоположения на направляющей энергетической цепи. Такие силоизмерительные системы были описаны заявителем в WO 2004/090375 A1 и WO 2013/156607 A1. При очень длинных путях перемещения, например, >100 м, необходимо задавать пределы растягивающей/сгибающей силы, задаваемые для распознавания неисправности или аварийного выключения, в зависимости от мгновенного местоположения направляющей энергетической цепи, поскольку необходимые пусковые силы в полностью выдвинутом вперед конечном местоположении заметно выше, чем в другом конечном местоположении вследствие необходимости перемещения по существу всего поддерживаемого участка, ср. WO 2004/090375 A1. Соответственно, с помощью предложенной системы для определения местоположения в сочетании с силоизмерительной системой, например, в соответствии с WO 2004/090375 A1 или WO 2013/156607 A1, идея которых в этом отношении включена в настоящий документ, может быть предложена надежная интегрированная система, в которой не требуется получение информации о местоположении от системы управления питаемой установки или машины. При необходимости, система для определения местоположения может также использоваться системой управления установки или машины (например, крана) в качестве источника информации о местоположении, относящейся к перемещающейся части.
Предложенная система, в частности, в соответствии с первым аспектом, может также обеспечивать высокую точность определения местоположения и, соответственно, может использоваться для непрерывного измерения абсолютного местоположения выполненной с возможностью перемещения части машины или установки, например, выполненной с возможностью линейного перемещения крановой тележки, питаемой этой энергетической цепью.
Дополнительные признаки и преимущества настоящего изобретения могут быть выведены без ограничения объема защиты из последующего более подробного описания предпочтительных примеров осуществления, выполненных на основе прилагаемых чертежей, на которых:
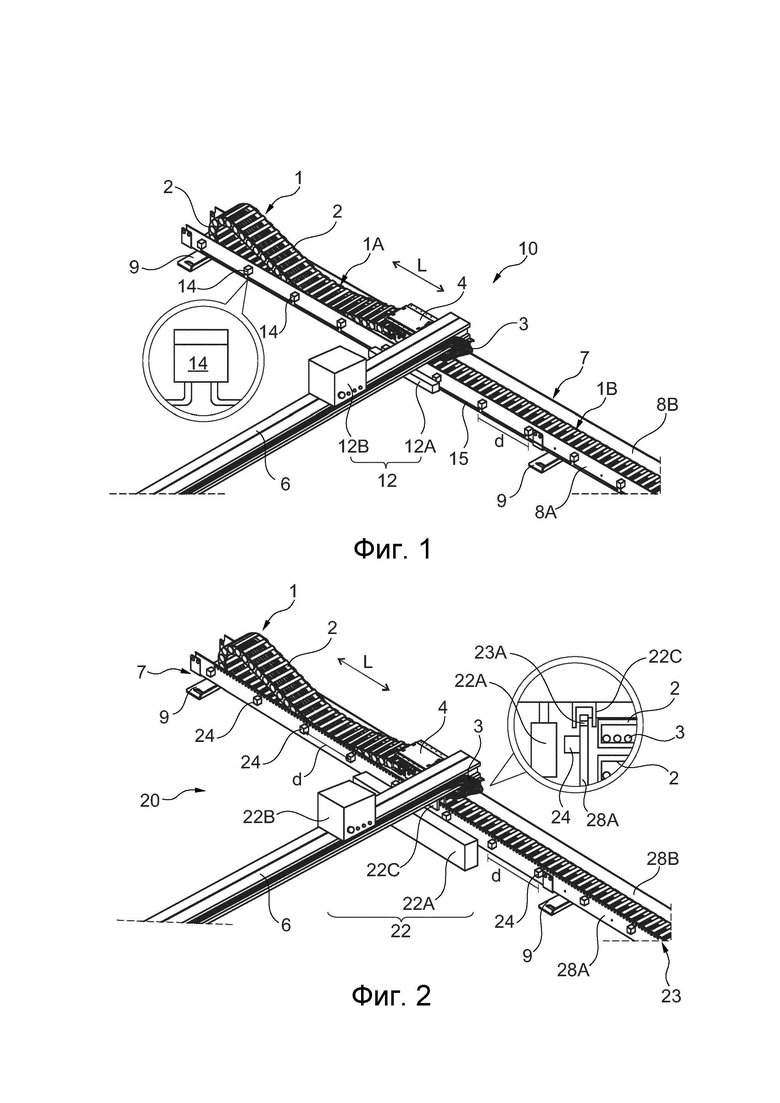
на фиг. 1 показан вид в перспективе схематического представления предпочтительного первого примера осуществления для определения местоположения на основе радиосвязи с направляющей энергетической цепью в направляющем канале для особенно длинных путей перемещения, при этом показана только его часть;
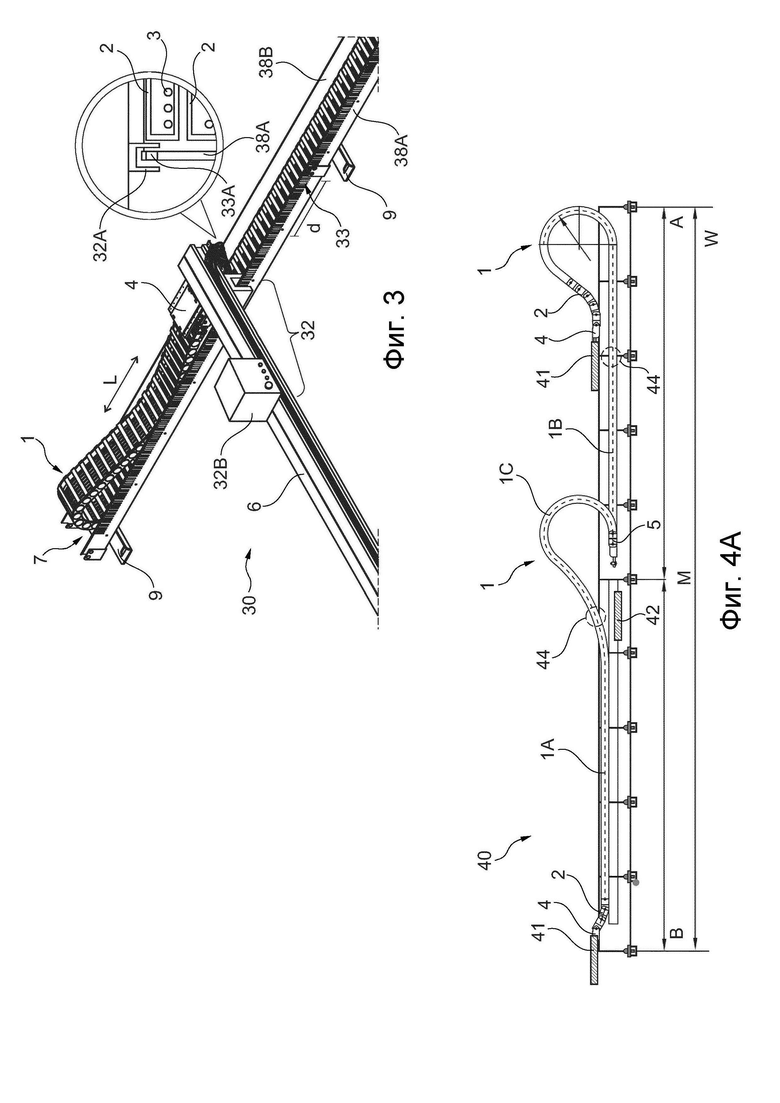
на фиг. 2 показан вид в перспективе схематического представления второго примера осуществления для комбинированного определения местоположения на основе радиосвязи и оптического определения местоположения, при этом показана только его часть;
на фиг. 3 показан вид в перспективе схематического представления третьего примера осуществления для оптического определения местоположения, при этом показана только его часть;
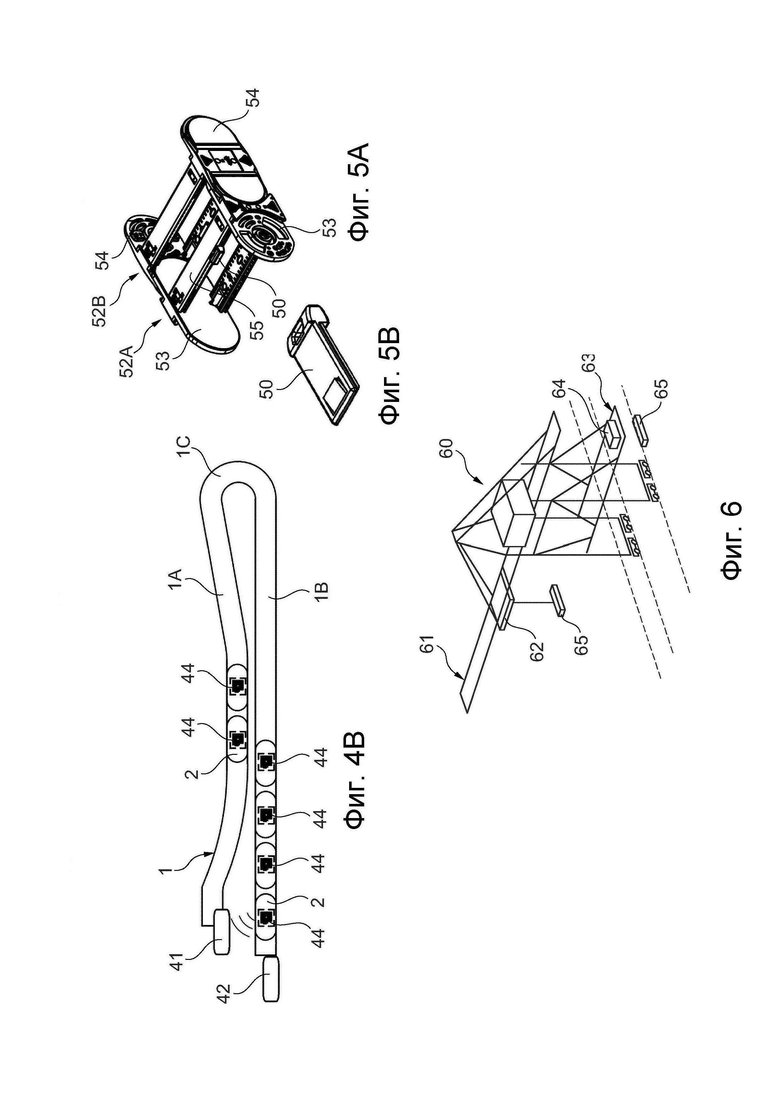
на фиг. 4А-4В показаны схематические виды сбоку примера осуществления для определения местоположения на основе направляющей энергетической цепи, который также подходит для применений без направляющего канала;
на фиг. 5А-5В показаны звенья цепи (фиг. 5А) приведенной для примера направляющей энергетической цепи и радиомодуля в качестве контрольного компонента (фиг. 5В) для модернизации поперечины звена цепи; и
на фиг. 6 показан козловый (контейнерный) кран в качестве примера применения системы по фиг. 1-3.
На фиг. 1 показана направляющая энергетическая цепь 1 (далее называемая для краткости "энергетической цепью"), состоящая из шарнирно соединенных звеньев 2 цепи для динамического защищенного направления линий 3 по пути перемещения. Один конец энергетической цепи 1 прикреплен к перемещающемуся концу 4, а другой конец прикреплен к неподвижной точке 5 соединения (фиг. 4А). На перемещающемся конце 4 линии 3, например, линии подачи питания и управления, выходят из энергетической цепи 1 и проходят к подвижному потребителю, который здесь полностью схематично показан в виде несущего элемента 6. Энергетическая цепь 1 по фиг. 1 специально сконструирована для длинных путей перемещения, причем верхний участок 1А скользяще перемещается по нижнему участку 1В или катится по нему. В работе энергетическая цепь 1 движется, здесь, например, горизонтально, вдоль прямого продольного направления L.
Для этой цели энергетическая цепь 1 направляется в боковом направлении в направляющем канале 7, причем направляющий канал 7 проходит линейно в продольном направлении L по всей длине W (фиг. 4A) пути перемещения энергетической цепи 1, при этом здесь показана только часть. В каждом случае направляющий канал 7 выполнен из противоположных отдельных частей 8А, 8В боковой стенки, которые скреплены вместе с помощью установочных профилей 9, а также прикреплены к несущей конструкции. В частности, части 8А, 8В боковой стенки, которые могут быть рассмотрены на фиг.1, представляют собой идентично сконструированные части профиля из алюминия или стали обычной конструкции и заданной длины (например, 2 м). Идентично сконструированные части 8А, 8В боковой стенки могут быть использованы на обеих сторонах направляющего канала в системе 10 в соответствии с фиг. 1. Части 8А, 8В боковой стенки последовательно соединены без зазоров в продольном направлении или неподвижно прикреплены к несущей конструкции (не показана), например, с использованием установочных профилей 9. Таким образом, отдельные части 8А, 8В боковой стенки следуют непосредственно друг за другом на каждой стороне направляющего канала 7 в соответствии с линейным направлением движения энергетической цепи 1 или перемещающегося конца 4. Отдельные части 8А, 8В боковой стенки имеют заранее заданное установочное местоположение, то есть жестко заданное местоположение на установке/машине.
На фиг. 1 также показана особенно предпочтительная система 10 для определения местоположения перемещающегося конца 4 или подвижной части 6 установки или машины, жестко соединенной с ним. Система 10 содержит датчиковое устройство 12, которое на фиг. 1 по существу состоит из антенного устройства 12А с радиоантенной и компьютеризированного блока 12В оценки. Для сигнализации блок 12В оценки присоединен к антенному устройству 12А и среди прочего выполнен с возможностью оценки радиосигналов. Антенное устройство 12А может быть выполнено с возможностью приема и/или передачи радиосигналов, на фиг. 1 прежде всего с возможностью их приема. Система 10 также содержит множество отдельных контрольных компонентов 14 на основе радиосвязи, которые для определения местоположения взаимодействуют с датчиковым устройством 12. Здесь контрольные компоненты 14 на основе радиосвязи предусмотрены в виде отдельных компонентов, расположенных на жестко заданном расстоянии d на одной стороне направляющего канала 7. На фиг. 1 в каждом случае множество контрольных компонентов 14 прикреплены в качестве отдельных компонентов к назначенной части 8А боковой стенки. Здесь контрольные компоненты 14 предусмотрены на направляющем канале 7 и распределены на постоянном расстоянии d по всей длине W пути W перемещения (фиг. 4А). Таким образом, после установки на направляющем канале 7 местоположение отдельных контрольных компонентов 14 аналогичным образом заранее определено.
На фиг. 1 контрольные компоненты 14 системы 10 позиционирования имеют проводное соединение, а именно, с помощью подходящей шины для подачи питания и обмена данными. Благодаря шине 15, в частности, для всех контрольных компонентов 14 можно синхронизировать временной блок, содержащийся в отдельных контрольных компонентах 14, с текущим системным временем датчикового устройства 12. Как также указано на фиг. 1, антенное устройство 12А имеет такие размеры, что в диапазоне приема антенного устройства 12А всегда расположен по меньшей мере один контрольный компонент 14, предпочтительно по меньшей мере два контрольных компонента 14. Для определения местоположения каждый контрольный компонент 14 передает радиосигнал, содержащий уникальный идентификатор, например, адрес, соответствующего контрольного компонента 14 и временную метку, соответствующую времени исходящей передачи этого радиосигнала. На основе этого блок 12В оценки может выполнять точное измерение или вычисление времени пролета (TOF) с помощью соответствующих радиосигналов, которые были приняты антенным устройством 12А, в частности, посредством сравнения временной метки передачи контрольного компонента 14 с временной меткой приема соответствующего радиосигнала. На основе соответствующего измерения TOF может быть точно определено одномерное местоположение датчикового устройства 12 по отношению к заранее известному местоположению рассматриваемого контрольного компонента 14 и, следовательно, перемещающегося конца 4 в продольном направлении L. Точность может быть увеличена вычислительным образом при помощи оценки времени пролета (TOF) для множества контрольных компонентов 14 в диапазоне приема антенного устройства 12A. Альтернативно или в дополнение к измерениям TOF расстояние также может быть определено в количественном отношении на основе уровней радиосигнала с использованием принципа измерения RSS.
Таким образом, на фиг. 1 контрольные компоненты 14 реализованы в виде активных радиосхем, например модулей ZigBee, заранее определенное местоположение которых указывается с помощью уникального идентификатора, например, в ходе инициализации или во время контрольного прогона блоком 1В оценки. Предложенная система 10 позиционирования может быть оперативно установлена с небольшими дополнительными затратами по сравнению с обычной энергетической цепью 1 с направляющим каналом 7 (без системы позиционирования). Для этой цели контрольные компоненты 14, в частности, могут быть на заводе прикреплены к отдельным частям 8 боковой стенки, например, в специальных заранее изготовленных гнездах на внешней стенке части 8A боковой стенки, которые в то же время обеспечивают требуемое заранее заданное постоянное интервальное расстояние D. Проводное подключение контрольных компонентов 14 к шине 15 на месте эксплуатации может быть легко, быстро и надежно выполнено с использованием обычных промышленных соединителей. Датчиковое устройство 12, в свою очередь, может быть неподвижно прикреплено способом предварительного изготовления к перемещающемуся концу 4, а также в рабочем состоянии может питаться с его помощью (здесь не показано). Блок 12В оценки также может быть выполнен с возможностью присоединения к одному или более датчикам силы на перемещающемся конце 4 для измерения растягивающей и сгибающей сил, действующих на энергетическую цепь 1, ср. WO 2013/156607 A1, для осуществления измерения силы в зависимости от местоположения. Кроме того, блок 12В оценки может непрерывно передавать полученную информацию о местоположении на систему управления (не показана) питаемой машины/установки таким образом, что обычная отдельная система позиционирования не требуется.
На фиг. 2 показана альтернативная система 20 для определения местоположения в соответствии с объединенными оптическим принципом и принципом на основе радиосвязи. На фиг. 2 пассивные радиосхемы или радиокомпоненты 24 предусмотрены на одной стороне направляющего канала 7 в качестве контрольных компонентов, расположенных на заданном расстоянии d друг от друга. Радиокомпоненты 24 установлены в качестве отдельных компонентов на отдельных частях 28А боковой стенки. Радиокомпоненты 24 служат в качестве указателей приблизительного местоположения и опрашиваются по радиосвязи с помощью антенного устройства 22А, неподвижно прикрепленного к перемещающемуся концу 4 и движущемуся совместно с ним. Могут быть использованы радиокомпоненты 24, представляющие собой, например, пассивные COTS-RFID транспондеры, которые обычно возвращают уникальный идентификатор и питаются полем излучения антенного устройства 22А, выполненного в виде RFID считывателя или приемопередатчика. Радиосигналы, принимаемые антенным устройством 22A, также оцениваются в системе 20 блоком 22B оценки, но в этом случае для получения приблизительной информации об абсолютном местоположении на основе ранее известного изученного присвоения индивидуальных идентификаторов радиокомпонентов 24 в продольном направлении L. Более точная информация о местоположении на фиг. 2 обнаруживается с помощью датчикового устройства 22 в сочетании с принципом электрооптического инкрементного датчика. Для этой цели к блоку 22В оценки присоединена оптическая сканирующая головка 22С, например, имеющая источник света и световой сенсор. Сканирующая головка 22С перекрывает верхний конец частей 28А боковой стенки во время перемещения в продольном направлении L. При этом сканирующая головка 22C оптически взаимодействует с перфорированной дорожкой 23. Перфорированная дорожка 23 включена в верхний конец каждой части 28А боковой стенки одной стороны направляющего канала 7, то есть эти части 28А боковой стенки представляют собой специальные изделия (напротив, другие части 28В боковой стенки представляют собой обычные профили). Перфорированная дорожка 23 образована сквозными отверстиями 23А в частях 28А боковой стенки, которые предусмотрены по линии, параллельной продольному направлению L. Здесь для простоты изготовления отверстия 23А предпочтительно расположены на постоянном расстоянии друг от друга, однако при этом информация об абсолютном местоположении также определяется посредством изменений расстояния или поперечного сечения. Перфорированная дорожка 23 идентичным образом заранее изготовлена в каждой части 28А боковой стенки, например, при помощи штамповки или т.п. профильной детали. Разумеется, отверстия 23А также могут быть заменены пазами или другими отверстиями.
На фиг. 2 сканирующая головка 22С может работать в соответствии с принципом измерения изображений, то есть может выполнять фотоэлектрическое сканирование перфорированной дорожки 23 во время перемещения в продольном направлении. В соответствии с принципом инкрементного датчика сканирующая головка 22С для этой цели имеет, например, источник света и противостоящий фотодетектор, предпочтительно, двойное приспособление, содержащее две пары, состоящие из источника света и фотодетектора, смещенные в продольном направлении L на половину шага расположения отверстий 23А. В этом случае часть 28А боковой стенки, в частности, заранее изготовленная на ней перфорированная дорожка 23, образует материальную меру для сканирующей головки 22С по всему маршруту W с целью измерения длины и/или скорости. Подходящая оценка сигнала в блоке 22B оценки на основе импульсов от сканирующей головки 22C обеспечивает возможность относительно точного определения, например, скорости движения перемещающегося конца 4 в продольном направлении L. В свою очередь, для достижения более точного определения абсолютного местоположения может использоваться вычислительная обработка сигнала, в частности, в сочетании с информацией об относительно приблизительном местоположении, которую получают параллельно на основе радиокомпонентов 24 и антенного устройства 22A. В частности, когда, как это обычно бывает с пассивными радиокомпонентами 24 без источника питания, низкие скорости передачи данных не обеспечивают возможность точного измерения времени пролета, или синхронизация в действительности невозможна, преимущественными являются объединенные датчиковые системы для системы 20.
На фиг. 3 показана дополнительная система 30 позиционирования, которая, однако, работает исключительно с оптическим способом действия и, тем не менее, выдает относительно точную информацию об абсолютном местоположении. Здесь датчиковое устройство 32 содержит только одну оптическую или электрооптическую сканирующую головку 32А, которая присоединена к блоку 32В оценки для сигнализации. В системе 30 для определения местоположения на одной стороне направляющего канала 7 в каждой части 38A боковой стенки, то есть по всей длине W маршрута, предусмотрена кодирующая дорожка 33, состоящая из отдельных пазов 33А в части 38А боковой стенки, в каждом случае на ее верхнем конце. В каждом случае размеры пазов 33A в продольном направлении L являются различными в соответствии с заданной системой кодирования. Кодирующая дорожка 33 предпочтительно может быть закодирована различным образом во всех частях 38A боковой стенки так, что по всему маршруту W могут непрерывно определять точное абсолютное местоположение перемещающегося конца 4. Здесь местоположение определяют, как известно для систем кодирования местоположения с кодирующей направляющей, посредством декодирования сигналов, которые подаются в блок 32B оценки сканирующей головкой 32A, с использованием подходящей технологии, известной специалисту в данной области техники, в частности, реализуемой с помощью компьютера или цифровой технологии. Например, эта идея может быть продолжена контрольным запуском инициализации перемещающегося конца 4 с датчиковым устройством 32 между двумя конечными точками A и B (фиг. 4A). Как на фиг. 3, кодирующая дорожка предпочтительно, но при необходимости, реализуется в качестве выполненного за одно целое компонента частей 38А боковой стенки направляющего канала 7, то есть не предусмотрена в виде отдельной кодирующей направляющей. В дополнение к оптическому сканированию также может быть использовано электромагнитное или визуальное сканирование с использованием технологии распознавания изображений.
Все системы 10, 20, 30 по фиг. 1 - фиг. 3, являются надежными в отношении деструктивного воздействия окружающей среды и являются особенно подходящими для наружного использования, например, в тяжелой промышленности или больших крановых системах, таких как козловые контейнерные краны.
На фиг. 6 в качестве примера применения мостового или козлового крана, в частности, здесь козлового контейнерного крана 60 или причального перегружающего крана для транспортировочного контейнера 65 ISO. Примерный козловый контейнерный кран 60 имеет верхний мост 61 крана с первой крановой тележкой 62 и нижний мост 63 крана со второй крановой тележкой 64, каждая из которых здесь движется линейно, например, на расстояние >10 м. Обе крановые тележки 62, 64 обычно питаются энергетическими цепями 1, например, для подачи питания на распределитель контейнеров и управления его приводом. Для управления крановыми тележками 62, 64 в качестве системы для измерения местоположения может быть предусмотрена система 10, 20, 30 по фиг. 1-3, особенно предпочтительно, система 10 по фиг. 1. Установка отдельной системы для измерения местоположения, как это было ранее, здесь не требуется. Здесь система 10, 20, 30 по фиг. 1-3 устанавливается вместе с направляющим каналом 7 и энергетической цепью 1, например, на крановой балке, то есть не требуется никаких дополнительных усилий по установке. Кроме того, обычно в любом случае линии уже проложены от прикрепленной точки 5 соединения энергетической цепи (фиг. 4A) к системе управления крана. Система 10, 20, 30 по фиг. 1-3 также преимущественно может быть использована в других типах кранов, например, козловых контейнерных кранах на рельсовом ходу и других применениях в тяжелой промышленности, в частности, для отслеживания местоположения или управления частью питаемой машины, к которой прикреплен перемещающийся конец 4.
Наконец, на фиг. 4А-4В схематично показан вариант системы 40 обнаружения энергетической цепи 1, которая выполнена с возможностью использования также без направляющего канала 7. Контрольные компоненты 44, здесь выполненные в виде радиосхем, например RFID транспондеров, предусмотрены на каждом n-ом звене 1 цепи, например, на каждом втором или третьем звене, или на действительно каждом звене 1 цепи энергетической цепи 1. На перемещающемся конце 4 предусмотрена первая антенна 41, которая действует при перемещении в продольном направлении L на первой под-секции от первой конечной точки A до середины M полного маршрута W, то есть от прикрепленной точки 5 соединения энергетической цепи. По мере движения по этой сборочной секции первая антенна 41 может последовательно обнаруживать контрольные компоненты 44, например, RFID идентификаторы, на звеньях 1 цепи на покоящемся нижнем участке для получения от них информации об абсолютном местоположении. Вблизи прикрепленной точки 5 соединения предусмотрена неподвижная вторая антенна 42, которая действует по второй под-секции от середины М полного маршрута W ко второй конечной точке В и обнаруживает контрольные компоненты 44 на перемещающемся верхнем участке 1В для получения от них информации об абсолютном местоположении. Альтернативно, система 40 обнаружения также может использоваться для определения местоположения или дополнительно к этому для обнаружения, движется ли энергетическая цепь 1 правильно или как предполагалось, например, не поднимается ли нежелательным образом верхний участок 1A. Для этой цели контрольные компоненты 44 предпочтительно предусмотрены на стороне энергетической цепи 1, расположенной внутри провисающей дуги 1С (ср. фиг. 4А), например, на поперечинах 55 (фиг. 5А). Альтернативно, контрольные компоненты 44 могут быть расположены, например, на боковых пластинах 53, 54 или боковых частях выбранных звеньев 2 цепи (ср. фиг. 4В).
Например, контрольные компоненты 44 могут быть установлены в виде модернизируемых контрольных радиомодулей 50, выполненных с возможностью вставки в обычные поперечины 55 звеньев 52А или 52В цепи (ср. фиг. 5А-5В). Поперечины 55 обычно предусмотрены в звеньях 1 или 52А, 52В цепи для присоединения боковых пластин 53 или 54 этих звеньев 1 или 52А, 52В цепи. Исключительно в качестве примера на фиг. 5А показаны звенья 52А, 52В цепи с чередующимися внутренними и внешними пластинами для длинных полных маршрутов W, но настоящее изобретение применимо с любыми требуемыми энергетическими цепями 1.
В качестве альтернативы принципу на основе на радиосвязи в соответствии с фиг. 4-5, также возможна полностью оптическая идентификация, например, посредством подсчета поперечин 55 с использованием световых завес. Здесь на концевом участке вблизи конечной точки В при необходимости предусмотрен третий неподвижный датчик, поскольку в конечном местоположении провисающая дуга 1С обычно поднимается вертикально от середины М, то есть здесь трудно оптически определить поперечины 55.
Показанное на фиг. 6 применение системы 10, 20, 30 в соответствии с настоящим изобретением в кране 60 является только примерным, настоящее изобретение преимущественно применимо во многих областях, в частности, в применениях с длинными путями перемещения, в которых, например, в целях автоматизации, должно определяться местоположение перемещающейся части установки/машины, питаемой энергетической цепью 1.
Следовательно, система 10, 20, 30, 40 в соответствии с настоящим изобретением, в частности, может быть преимущественно использована в сочетании со скользяще перемещающимися или роликовыми энергетическими цепями 1, которые особенно подходят для длинных путей перемещения, то есть с энергетическими цепями 1 по существу известной конструкции, в которой подвижный верхний участок 1А может скользяще перемещаться или катиться по покоящемуся нижнему участку 1В, как это очевидно из фиг. 1-3.
Список ссылочных обозначений
Фиг. 1
1 Направляющая энергетическая цепь
1А Верхний участок
1В Нижний участок
2 Звено цепи
3 Линия
4 Перемещающийся конец
6 Несущий элемент (питаемая часть)
7 Направляющий канал
8А, 8В Часть боковой стенки (направляющий канал)
9 Установочный профиль
10 Система позиционирования
12 Датчиковое устройство
12А Антенное устройство
12В Блок оценки
14 Контрольный компонент (радио)
15 Шина
L Продольное направление
Фиг. 2
1 Направляющая энергетическая цепь
7 Направляющий канал
20 Система позиционирования
22 Датчиковое устройство
22А Антенное устройство
22В Блок оценки
22С Сканирующая головка (оптическая)
23 Перфорированная дорожка (оптическая)
23А Отверстие
24 Первый контрольный компонент (радио)
28А, 28В Часть боковой стенки (направляющий канал)
L Продольное направление
Фиг. 3
1 Направляющая энергетическая цепь
4 Перемещающийся конец
7 Направляющий канал
30 Система позиционирования
32 Датчиковое устройство
32А Сканирующая головка (оптическая)
32В Блок оценки
33 Кодирующая дорожка (оптическая)
33АПаз
38А, 38ВЧасть боковой стенки (направляющий канал)
L Продольное направление
Фиг. 4А-4В
1 Направляющая энергетическая цепь
1А Верхний участок
1В Нижний участок
1С Провисающая дуга
2 Звено цепи
4 Перемещающийся конец (подвижная точка соединения)
5 Прикрепленная/неподвижная точка соединения
40 Система позиционирования
41 Первая антенна
42 Вторая антенна
44 Контрольный компонент (радио)
А Первое конечное местоположение
В Второе конечное местоположение
М Середина
W Полный маршрут
Фиг. 4А-5В
50 Контрольный радиомодуль
52А; 52В Звено цепи
53, 54 Боковая пластина
55 Поперечина
Фиг. 6
60 Козловый (контейнерный) кран
61 Верхний мост
62 Крановая тележка
63 Нижний мост
64 Крановая тележка
65 Транспортировочный контейнер ISO
Изобретение относится к энергетическим цепям. Система для определения местоположения с направляющей энергетической цепью для направления линий питания содержит направляющее приспособление с направляющими компонентами, расположенными вдоль маршрута для направления в боковом направлении направляющей энергетической цепи во время перемещения, и датчиковое устройство для определения местоположения, установленное на перемещающемся конце. На некоторых направляющих компонентах расположен по меньшей мере один контрольный компонент, служащий в качестве указателя местоположения. Датчиковое устройство выполнено с возможностью взаимодействия с отдельными контрольными компонентами для определения местоположения. Улучшается определение местоположения цепи, а также повышается надежность цепи. 5 н. и 9 з.п. ф-лы, 6 ил.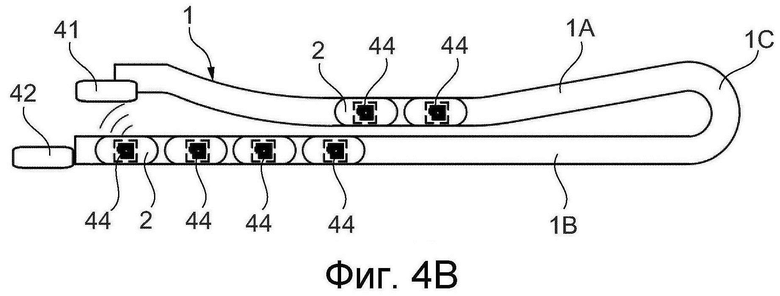
1. Система (10; 20; 30) для определения местоположения с направляющей энергетической цепью (1) для направления линий питания, причем направляющая энергетическая цепь содержит первый участок (1В), который на конце прикреплен к точке соединения, и подвижный второй участок (1А), который на конце прикреплен к перемещающемуся концу (4), указанный перемещающийся конец выполнен с возможностью перемещения вперед и назад по маршруту, при этом система содержит
направляющее приспособление (7) с направляющими компонентами (8A, 8B; 28A, 28B; 38A, 38B), расположенными вдоль маршрута для направления в боковом направлении направляющей энергетической цепи во время перемещения,
датчиковое устройство (12; 22; 32) для определения местоположения, установленное на перемещающемся конце (4),
отличающаяся тем, что по меньшей мере на некоторых направляющих компонентах (8A, 8B; 28A, 28B; 38A, 38B) расположен по меньшей мере один контрольный компонент (14; 23A, 24; 33, 33А), служащий в качестве указателя местоположения, и тем, что датчиковое устройство (12; 22; 32) выполнено с возможностью взаимодействия с отдельными контрольными компонентами для определения местоположения.
2. Система (40) для определения местоположения с направляющей энергетической цепью (1) для направления линий питания, причем направляющая энергетическая цепь содержит звенья (2) цепи, а также первый участок (1В), который на конце прикреплен к неподвижной точке (5) соединения, и подвижный второй участок (1А), который на конце прикреплен к выполненному с возможностью перемещения перемещающемуся концу (4), который выполнен с возможностью перемещения вперед и назад по маршруту и образует между ними провисающую дугу (1С), при этом система содержит
первое датчиковое устройство (41) для определения местоположения, установленное на перемещающемся конце,
отличающаяся тем, что на неподвижной точке (5) соединения неподвижно установлено второе датчиковое устройство (42) для определения местоположения,
и тем, что по меньшей мере на каждом n-м звене (2) цепи содержится по меньшей мере один контрольный компонент (44), а также тем, что в зависимости от местоположения движения по маршруту первое датчиковое устройство (41) или второе датчиковое устройство (42) взаимодействует с отдельными контрольными компонентами (44) звеньев (2) цепи для определения местоположения.
3. Система по п. 1 или 2, отличающаяся тем, что каждое датчиковое устройство (12; 22; 32; 41, 42) выполнено с возможностью бесконтактного взаимодействия с отдельными контрольными компонентами (14; 24; 33, 33A; 44), в частности электромагнитным способом, предпочтительно, посредством радиосвязи, оптическим и/или акустическим способом, предпочтительно, при помощи ультразвука.
4. Система по пп. 1, 2 или 3, отличающаяся тем, что контрольные компоненты (14; 24; 33, 33A; 44) расположены на заданном, в частности с равными интервалами, расстоянии
и/или каждый контрольный компонент (14; 24; 44) имеет уникальный идентификатор, который выполнен с возможностью связи с местоположением, в частности абсолютным местоположением, по маршруту.
5. Система по п. 3 или 4, отличающаяся тем, что контрольный компонент (14; 24; 44) выполнен в виде радиосхемы, выполненной с возможностью передачи, а датчиковое устройство имеет соответствующий приемник (12A, 12B; 22A, 22B; 41, 42).
6. Система по любому из пп. 3-5, отличающаяся тем, что контрольный компонент выполнен в виде радиокомпонента (14; 24; 44), а именно пассивной радиосхемы, в частности RFID транспондера, или активной радиосхемы, а каждое датчиковое устройство содержит соответствующее антенное приспособление (12A; 22A; 41, 42).
7. Система по п. 3, отличающаяся тем, что указанный по меньшей мере один контрольный компонент (23A; 33A) выполнен в виде оптической и/или электромагнитной разметки, в частности кодированной разметки (33А), выполненной с возможностью обнаружения с использованием оптического и/или электромагнитного датчика (22С; 32А) датчикового устройства.
8. Система по любому из пп. 1-7, отличающаяся тем, что направляющее приспособление представляет собой направляющий канал (7), причем направляющие компоненты содержат части (8A, 8B; 28A, 28B; 38A, 38B) боковой стенки,
причем части (8A, 8B; 28A, 28B; 38A, 38B) боковой стенки расположены неподвижно в продольном направлении (L) в непрерывной последовательности по обеим сторонам вдоль маршрута, и в каждом случае по меньшей мере каждая n-я часть (8A, 8B; 28A, 28B; 38A, 38B) боковой стенки одной стороны направляющего канала содержит по меньшей мере один контрольный компонент (14; 23A, 24; 33, 33A), и/или
причем контрольный компонент (14, 24) предпочтительно прикреплен в качестве отдельного компонента к части боковой стенки или представляет собой выполненный за одно целое компонент (23А, 33) этой части боковой стенки.
9. Система по п. 1, отличающаяся тем, что направляющее приспособление в качестве своих направляющих компонентов имеет прикрепленные направляющие элементы нижней части, распределенные на заданном соответственном расстоянии по маршруту, причем по меньшей мере каждый n-й направляющий элемент нижней части содержит контрольный компонент, предпочтительно радиокомпонент.
10. Система по п. 2, отличающаяся тем, что каждый контрольный компонент (50) содержит поперечину (55) звена цепи или установлен на поперечине (55), и/или, в частности, содержит выполненную с возможностью оптического и/или электромагнитного обнаружения разметку и/или пассивный радиокомпонент (50).
11. Система по одному из предыдущих пунктов, содержащая систему управления установки для управления перемещением подвижной части (62, 64) машины, содержащей перемещающийся конец (4), отличающаяся тем, что для определения местоположения указанной подвижной части (62, 64) машины указанная система управления соединена с датчиковым устройством (12; 22; 32; 41, 42) для сигнализации.
12. Компонент (8A, 8B; 28A, 28B; 38A, 38B) для сборки боковой стенки направляющего канала для направляющей энергетической цепи (1), отличающийся тем, что на части (8A, 8B; 28A, 28B; 38A, 38B) боковой стенки предусмотрен по меньшей мере один неподвижный контрольный компонент (14; 23A, 24; 33, 33A), в частности радиокомпонент (14; 24), или выполненная с возможностью оптического и/или электромагнитного обнаружения разметка (23A, 33), причем контрольный компонент выполнен с возможностью взаимодействия в качестве указателя местоположения с датчиковым устройством для определения местоположения.
13. Кран (60), в частности козловый кран или мостовой кран, такой как козловый контейнерный кран, содержащий выполненную с возможностью линейного перемещения крановую тележку (62, 64) и систему (10; 20; 30; 40) по одному из пп. 1-11, причем крановая тележка (62, 64) соединена на перемещающемся конце с направляющей энергетической цепи (1), а кран содержит систему управления, присоединенную к датчиковому устройству для сигнализации.
14. Применение системы (10; 20; 30; 40) по одному из пп. 1-11 для непрерывного измерения абсолютного местоположения выполненной с возможностью перемещения части машины или установки, в частности выполненной с возможностью линейного перемещения крановой тележки (62, 64), питаемой направляющей энергетической цепью (1).
| НАПРАВЛЯЮЩАЯ ЦЕПЬ ДЛЯ ЭНЕРГЕТИЧЕСКИХ ЛИНИЙ | 1996 |
|
RU2160399C2 |
| DE 202018101942 U1, 03.05.2018 | |||
| DE 202016107316 U1, 27.03.2017 | |||
| DE 202016107317 U1, 27.03.2017 | |||
| DE 102012113082 A1, 26.06.2014. | |||
