Изобретение относится к области измерительной техники, связанной с измерением массы грузов в движении. Изобретение предназначено для определения массы движущихся грузов с помощью динамометров с высокой точностью.
Изобретение может применяться в различных отраслях промышленности, торговли, сельского хозяйства: измерение массы грузов, перевозимых автомобилями и поездами; измерение массы тел на движущихся транспортерах и фасовочных линиях (взвешивание и отбраковка продукции); измерение массы и центра тяжести самолета на аэродроме; определение нагрузок при испытаниях изделий на удар о препятствие; определение нагрузок, действующих на автомобильные шины на испытательных стендах.
Известны устройства для определения массы движущихся объектов. К ним относятся врезные автомобильные весы, содержащие размещенный в дорожном покрытии фундамент с весовой ямой, датчики веса (тензометрические динамометры, динамометры), размещенные в весовой яме, весоприемную платформу, опирающуюся на датчики веса (Патент RU 164544 U1 от 10.09.2016, Заявка 2015152871/28 от 10.12.2015). Известны устройства для измерения компонентов силы и момента, которые в общем случае называются динамометрами. К ним относятся датчики силы, датчики момента и тензометрические весы. Динамометр (см. В.В. Богданов, B.C. Волобуев. Многокомпонентные тензометрические весы. «Датчики и системы», 2004, №3, стр. 3), состоит из элемента соединения с основанием, элемента приложения силы (метрическая часть), чувствительных элементов и тензорезисторов, преобразующих деформации чувствительных элементов в электрические сигналы.
Известен способ взвешивания и определения характеристик движущегося транспортного средства (Патент "A system and method for accurately weighting and characterizing moving vehicles" WO 98/40705 от 17.09.98), в котором в процессе движения объекта измеряют силу давления шины на датчик силы в зависимости от времени. Суммарный вес объекта определяют в виде интеграла от сигнала датчика по времени методом Симпсона. Недостатком этого способа является то, что для определения веса требуется определенный интервал времени.
Прототипом изобретения является способ "Dynamic weighing method of determining a load measurement value and the resolution thereof ("Метод динамического взвешивания для определения величины измеряемой нагрузки и его разрешения", патент США №5,585,604, международный номер заявки на изобретение PCT/SE 92/00324 от 18.05.1992 и соответствующий номер международной публикации WO 092/21009 от 26.11.1992). Взвешиваемый объект перемещают по платформе, установленной на динамометрах. Динамометры генерируют сигнал, зависящий от нагрузки, который возрастает от первоначального значения до максимального и уменьшается до первоначального значения при въезде объекта на платформу, расположении объекта целиком на платформе и съезду объекта с платформы. Предварительно, приблизительное значение пика определяют в качестве искомого веса. Сигнал интегрируют на интервале времени, в котором расположен определенный ранее пик. Далее вычисляют форм-фактор сигнала как функцию отношения полученного интеграла от сигнала к произведению величины пика на интервал времени.
Недостатками рассмотренного в прототипе способа являются:
1. Точность способа уменьшается при увеличении скорости движущегося объекта (уменьшается время измерения).
2. Способ становится неработоспособным, когда при увеличении скорости движущегося объекта возникают собственные колебания платформы вместе с движущимся по ней объектом.
Повышение скорости грузов при взвешивании в поточном производстве приводит к уменьшению цикла производства и, следовательно, к потенциальному увеличению производительности линии и к повышению эффективности всех схем грузопотоков. Измерения массы осуществляются однокомпонентными тензометрическими динамометрами. При увеличении скорости движения грузов понижается точность измерений вследствие возрастающей динамики измерительной системы на ее собственной частоте. Это связано с упругостью чувствительного элемента динамометра, который сам по себе является динамической системой. Этим обусловлена сложность решаемой проблемы: измерение массы движущегося объекта осуществляется динамической системой.
Техническим результатом изобретения является повышение точности определения массы движущегося объекта.
Технический результат достигается тем, что в способе определения массы движущегося объекта, в котором взвешиваемый объект перемещают по платформе, установленной на динамометре, и измеряют сигнал, генерируемый динамометром, определяют массу метрической части динамометра и платформы m по показаниям динамометра при изменении его угла тангажа θ, динамометр совместно с платформой монтируют на вибростенд элементом соединения динамометра с основанием, на элемент соединения динамометра с основанием устанавливают устройство измерения ускорения, с помощью вибростенда задают установившиеся гармонические колебания элемента соединения динамометра с основанием при различных значениях частоты, коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω определяют по показаниям динамометра и устройства измерения ускорения с использованием следующих уравнений: 

где Δϕ - разность фаз колебаний метрической части инамометра относительно элемента соединения динамометра с основанием; F0- амплитуда колебаний сигнала динамометра; ω1 - круговая частота колебаний элемента соединения динамометра с основанием, задаваемая вибростендом; ω0 - собственная круговая частота колебаний динамометра с прикрепленной к нему платформой при отсутствии демпфирования;  - амплитуда ускорения элемента соединения динамометра с основанием, измеренная устройством измерения ускорения, далее, полученные таким образом коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω используют для определения искомой массы движущегося объекта по формуле:
- амплитуда ускорения элемента соединения динамометра с основанием, измеренная устройством измерения ускорения, далее, полученные таким образом коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω используют для определения искомой массы движущегося объекта по формуле:

где
m - масса метрической части динамометра и платформы;
ω - собственная круговая частота колебаний динамометра с платформой;
β - коэффициент демпфирования динамометра.
ωL - собственная круговая частота колебаний динамометра с платформой и движущимся объектом;
β - коэффициент демпфирования динамометра.
В качестве устройства измерения ускорения используют акселерометр. Технический результат достигается также тем, что в способе определения массы движущегося объекта, в котором взвешиваемый объект перемещают по платформе, установленной на динамометре, и измеряют сигнал, генерируемый динамометром, определяют массу метрической части динамометра и платформы m по показаниям динамометра при изменении его угла тангажа θ, элемент соединения динамометра с основанием прикрепляют к неподвижному основанию, к платформе или метрической части динамометра прикладывают ступенчатую или импульсную силу в направлении измерения динамометра которая вызывает свободные затухающие колебания платформы, коэффициент демпфирования β определяют по затуханию амплитуды показаний динамометра Fa=F0exp(-βTn/4m), а собственную круговую частоту колебаний динамометра с платформой ω=2πƒ одним из известных методов, где Fa - амплитуда показаний динамометра; F0 - начальная амплитуда показаний динамометра; Т - период колебаний; n - целое число; ƒ - частота свободных колебаний платформы, далее полученные таким образом коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω используют для определения искомой массы движущегося объекта по формуле:

где
m - масса метрической части динамометра и платформы;
ω - собственная круговая частота колебаний динамометра с платформой;
β - коэффициент демпфирования динамометра.
ωL - собственная круговая частота колебаний динамометра с платформой и движущимся объектом;
β - коэффициент демпфирования динамометра.
Перечень фигур, иллюстрирующих предложенный способ:
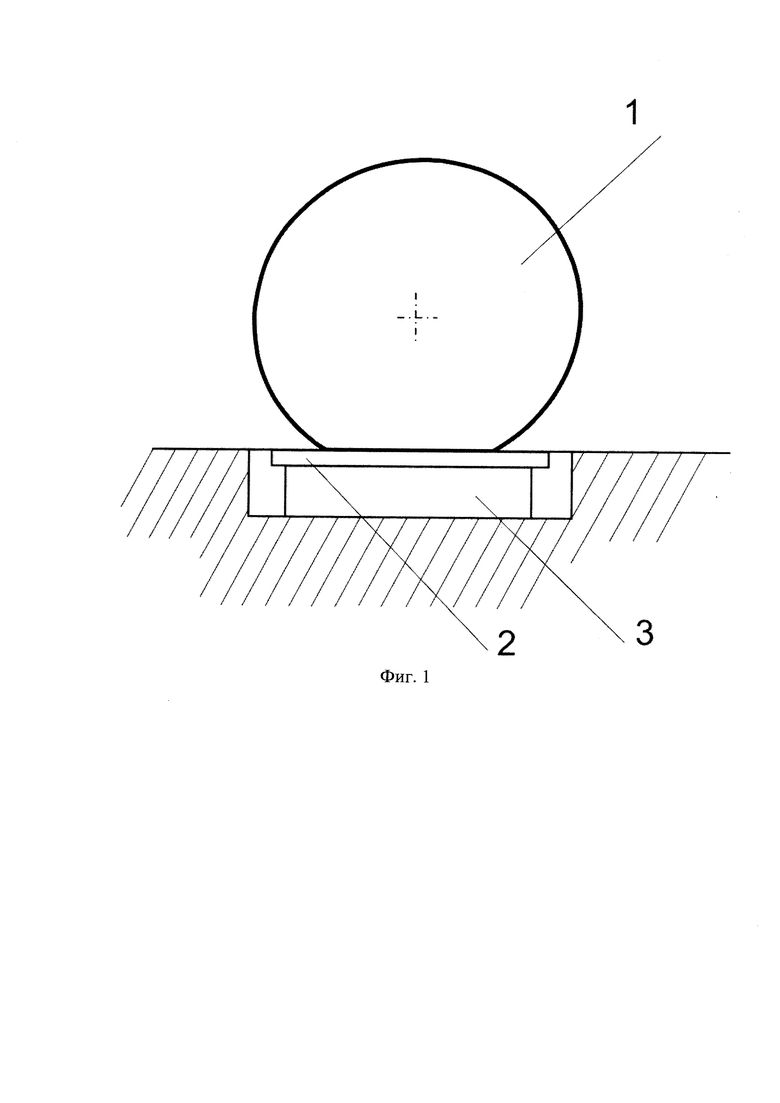
На фиг. 1 показана схема движения взвешиваемого объекта по платформе.
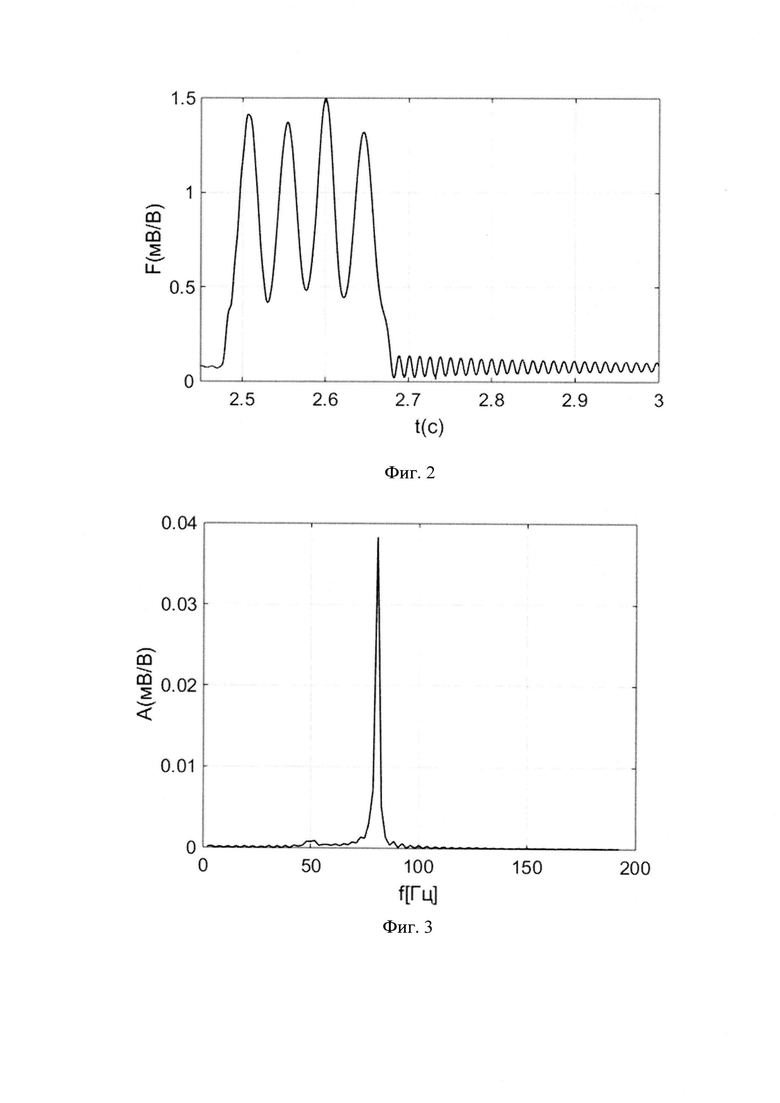
На фиг. 2 показана зависимость сигнала динамометра от времени при наезде взвешиваемого объекта на платформу, движении по платформе и съезде с платформы.
На фиг. 3 показана зависимость амплитуды сигнала динамометра от частоты колебаний. Частота, соответствующая максимуму функции, есть искомая собственная частота колебаний динамометра с платформой.
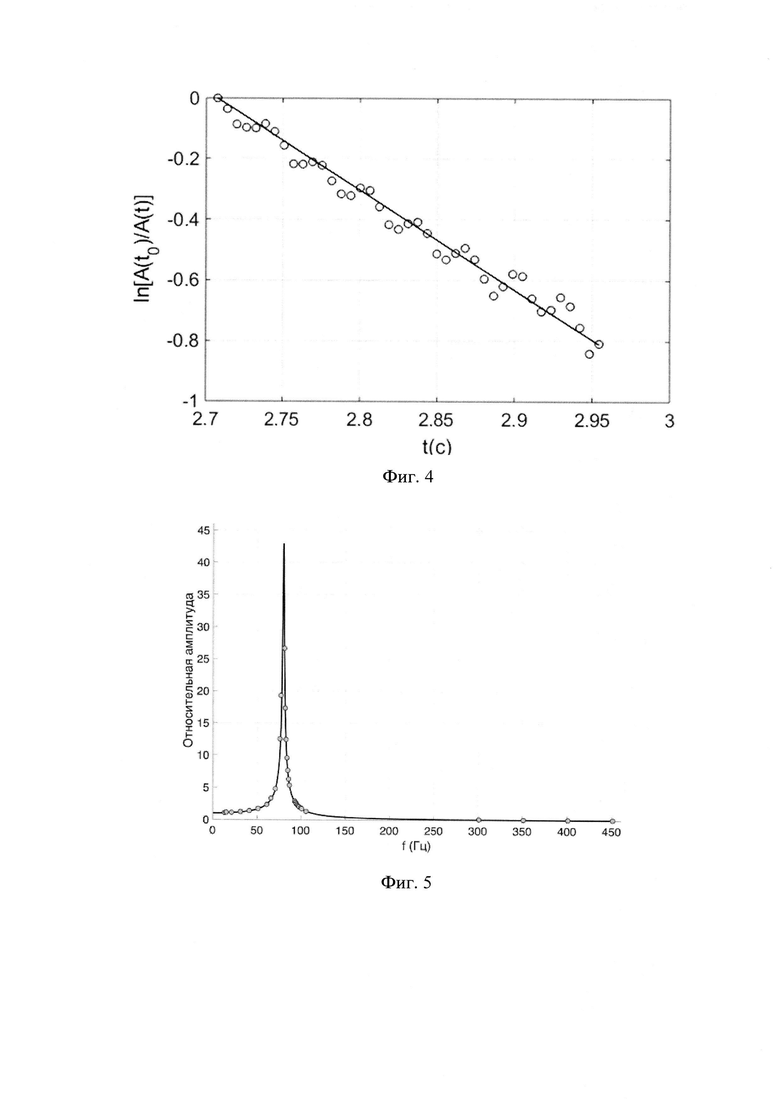
На фиг. 4 показана зависимость натурального логарифма отношения амплитуды колебаний к первоначальной амплитуде в зависимости от времени. Коэффициент наклона аппроксимирующей линейной функции есть искомый коэффициент демпфирования динамометра, взятый с обратным знаком.
На фиг. 5 показана зависимость относительной амплитуды сигнала динамометра от частоты установившихся гармонических колебаний платформы. Частота, соответствующая максимуму функции, есть собственная частота колебаний динамометра с платформой.
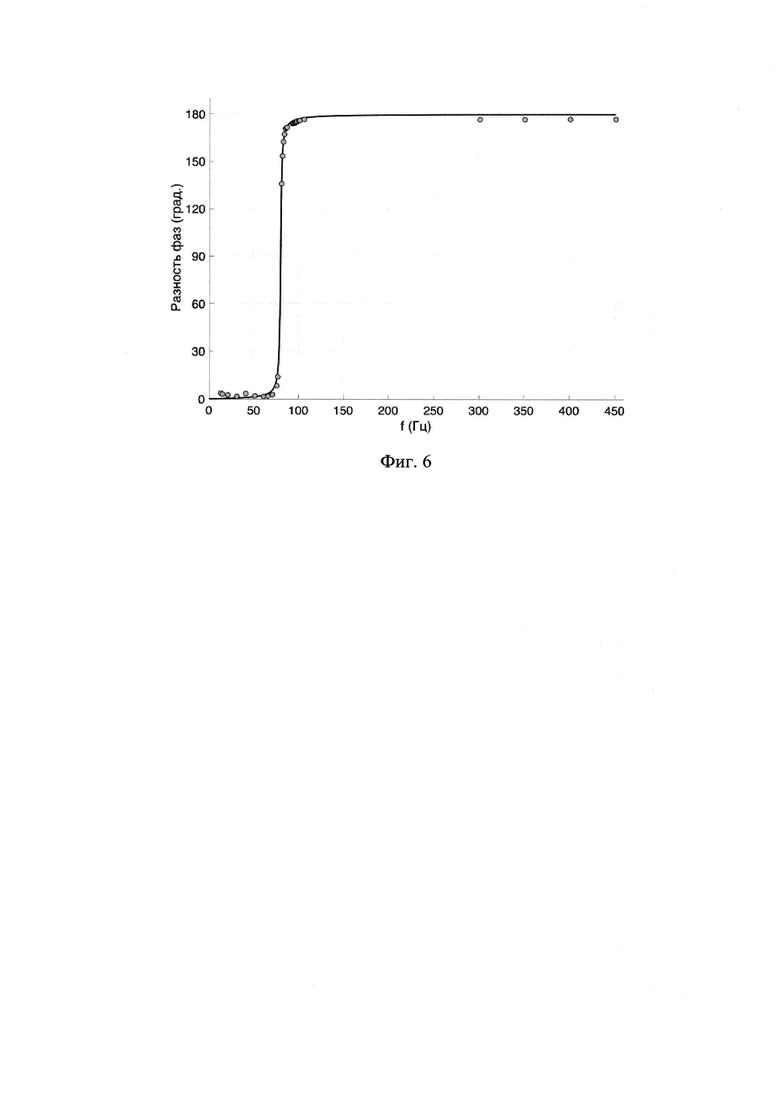
На фиг. 6 показана разность фаз колебаний платформы и элемента крепления динамометра к основанию в зависимости от частоты установившихся гармонических колебаний платформы.
На фигурах приняты следующие обозначения и условно показаны:
1 - движущийся объект;
2 - платформа;
3 - динамометр.
Способ определения массы движущегося объекта базируется на показаниях динамометра, взвешивающего платформу с движущимся грузом. Массу метрической части динамометра и платформы m определяют при изменении угла оси чувствительности (направления измерения) динамометра по отношению к горизонтальной плоскости (угол тангажа). Коэффициент демпфирования β и собственную частоту колебаний динамометра с платформой ω, которые необходимы для определения движущейся массы, определяют или по результатам частотных испытаний динамометра с платформой на вибростенде, или по результатам свободных колебаний динамометра с платформой.
Способ, на котором основана предлагаемая заявка, реализуется следующим образом:
1. К платформе 2, прикрепленной к динамометру (метрической части) 3, прикладывают вес объекта 1, движущегося по платформе, Mg, где М - искомая масса движущегося объекта; g - ускорение свободного падения в месте измерения.
2. Массу платформы 2 совместно с метрической частью динамометра 3 m определяют по показаниям динамометра при изменении его угла тангажа θ по формуле: F=mgsinθ, где F - показания динамометра. Более подробно этот метод изложен в статье: А.Р. Горбушин. Метод учета влияния веса модели и веса динамометра на показания тензометрических весов. Ученые записки ЦАГИ, т. XL, №4, 2009, с. 63-70.
3. Коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω определяют двумя способами.
a) Первый способ основан на вынужденных гармонических колебаниях. Динамометр совместно с платформой монтируют на вибростенд элементом соединения динамометра с основанием. На элемент соединения динамометра с основанием устанавливают устройство измерения ускорения, например, акселерометр. Вибростенд задает установившиеся гармонические колебания элемента соединения динамометра с основанием при различных значениях частоты. Коэффициент β и собственную круговую частоту колебаний динамометра с платформой ω определяют по показаниям динамометра и акселерометра с использованием следующих уравнений: 


где Δϕ - разность фаз колебаний элемента метрической части динамометра относительно элемента соединения динамометра с основанием; F0 - амплитуда колебаний сигнала динамометра; ω1 - круговая частота колебаний элемента соединения динамометра с основанием, задаваемая вибростендом; ω0 - собственная круговая частота колебаний динамометра с прикрепленной к нему платформой при отсутствии демпфирования (резонансная частота); - амплитуда ускорения элемента соединения динамометра с основанием, измеренная акселерометром.
b) Второй способ основан на свободных затухающих колебаниях. Элемент соединения динамометра с основанием прикрепляют к неподвижному основанию. К платформе или метрической части прикладывают ступенчатую или импульсную силу в направлении измерения динамометра, которая вызывает свободные затухающие колебания платформы. Коэффициент демпфирования β определяют по затуханию амплитуды показаний динамометра Fa=F0exp(-βTn/4m), а собственную круговую частоту колебаний динамометра с платформой ω=2πƒ одним из известных методов, например, быстрым преобразованием Фурье, где Fa - амплитуда показаний динамометра; F0 - начальная амплитуда показаний динамометра; Т - период колебаний; n - целое число; ƒ - частота свободных колебаний платформы.
4. Взвешиваемый объект перемещают по платформе, установленной на динамометре, измеряют сигнал динамометра и определяют собственную частоту колебаний по показаниям динамометра. Искомую массу взвешиваемого объекта определяют по формуле:

где М - искомая масса движущегося объекта;
ωL - круговая частота колебаний динамометра с платформой и движущимся объектом;
Достоинства предлагаемого способа определения массы движущегося объекта состоят в следующем:
1. Способ обеспечивает измерение массы объекта при больших скоростях его движения по платформе, когда возбуждаются собственные частоты динамометра.
2. Разработанный способ позволяет измерять массу движущегося груза с помощью динамометров во всем их рабочем диапазоне частот, включая собственную.
3. Для определения массы требуется лишь определить собственную частоту колебаний динамометра с платформой и движущимся грузом.
Получено подтверждение результатами экспериментальных исследований.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ДВИЖУЩЕГОСЯ ОБЪЕКТА (ВАРИАНТЫ) | 2022 |
|
RU2805127C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕСТАЦИОНАРНОЙ СИЛЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2743778C1 |
| Способ определения нестационарных углов тангажа и крена и устройство для его реализации | 2022 |
|
RU2780360C1 |
| Способ определения нестационарного давления потока газа и устройство для его реализации | 2022 |
|
RU2786749C1 |
| Способ определения демпфирующих характеристик жидкостей и сыпучих материалов | 2018 |
|
RU2699311C1 |
| Экспериментальная установка (стенд) для изучения многофакторной зависимости коэффициента демпфирования сваи при взаимодействии с грунтом | 2017 |
|
RU2646540C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ДАТЧИКА УСКОРЕНИЯ С ПОМОЩЬЮ ТРЕДБАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2625092C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРЕЦЕССИИ ЛИТОСФЕРЫ ВОКРУГ МАНТИИ ПЛАНЕТЫ | 2004 |
|
RU2263974C2 |
| СПОСОБ ИССЛЕДОВАНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ПОСРЕДСТВОМ ГИРОСКОПИЧЕСКОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2004 |
|
RU2274831C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
Изобретение относится к области измерительной техники, связанной с измерением массы грузов в движении. Способ определения массы движущегося объекта базируется на показаниях динамометра, взвешивающего платформу с движущимся грузом. Массу элемента приложения силы динамометра и платформы определяют при изменении угла оси чувствительности (направления измерения) динамометра по отношению к горизонтальной плоскости (угол тангажа). Коэффициент демпфирования динамометра и собственную частоту колебаний элемента приложения силы динамометра с платформой, необходимые для определения массы движущегося объекта, определяют или по результатам частотных испытаний динамометра с платформой на вибростенде, или по результатам свободных колебаний динамометра с платформой. Технический результат заключается в повышении точности определения массы движущегося объекта. 2 н. и 1 з.п. ф-лы, 6 ил. 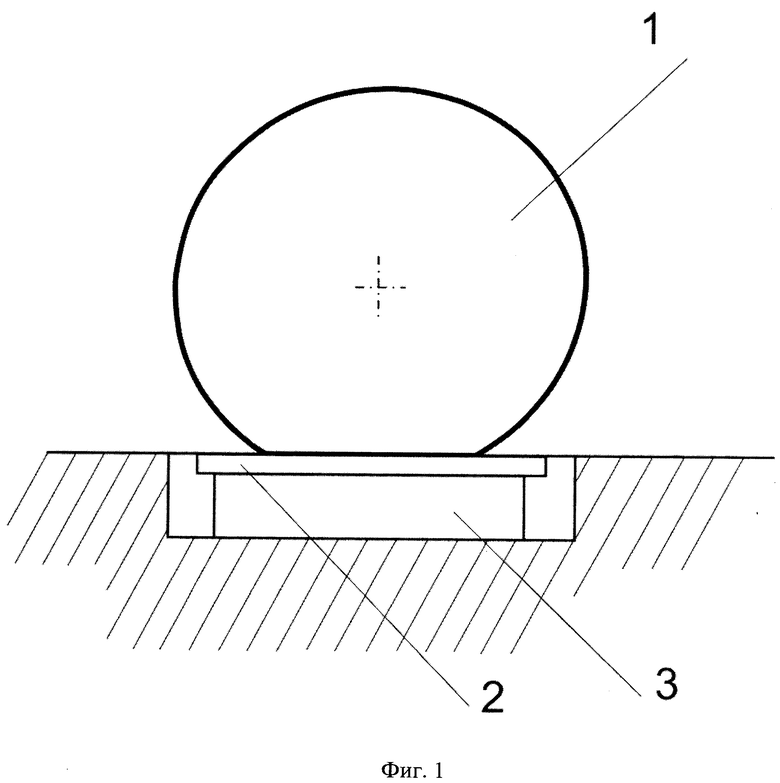
1. Способ определения массы движущегося объекта, в котором взвешиваемый объект перемещают по платформе, установленной на динамометре, и измеряют сигнал, генерируемый динамометром, отличающийся тем, что определяют массу метрической части динамометра и платформы m по показаниям динамометра при изменении его угла тангажа θ, динамометр совместно с платформой монтируют на вибростенд элементом соединения динамометра с основанием, на элемент соединения динамометра с основанием устанавливают устройство измерения ускорения, с помощью вибростенда задают установившиеся гармонические колебания элемента соединения динамометра с основанием при различных значениях частоты, коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω определяют по показаниям динамометра и устройства измерения ускорения с использованием следующих уравнений:



где Δϕ - разность фаз колебаний метрической части динамометра относительно элемента соединения динамометра с основанием; F0 - амплитуда колебаний сигнала динамометра; ω1 - круговая частота колебаний элемента соединения динамометра с основанием, задаваемая вибростендом; ω0 - собственная круговая частота колебаний динамометра с прикрепленной к нему платформой при отсутствии демпфирования;  - амплитуда ускорения элемента соединения динамометра с основанием, измеренная устройством измерения ускорения, далее полученные таким образом коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω используют для определения искомой массы движущегося объекта по формуле:
- амплитуда ускорения элемента соединения динамометра с основанием, измеренная устройством измерения ускорения, далее полученные таким образом коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω используют для определения искомой массы движущегося объекта по формуле:

где m - масса метрической части динамометра и платформы;
ω - собственная круговая частота колебаний динамометра с платформой;
β - коэффициент демпфирования динамометра;
ωL - собственная круговая частота колебаний динамометра с платформой и движущимся объектом;
β - коэффициент демпфирования динамометра.
2. Способ определения массы движущегося объекта по п. 1, отличающийся тем, что в качестве устройства измерения ускорения используют акселерометр.
3. Способ определения массы движущегося объекта, в котором взвешиваемый объект перемещают по платформе, установленной на динамометре, и измеряют сигнал, генерируемый динамометром, отличающийся тем, что определяют массу метрической части динамометра и платформы m по показаниям динамометра при изменении его угла тангажа θ, элемент соединения динамометра с основанием прикрепляют к неподвижному основанию, к платформе или метрической части динамометра прикладывают ступенчатую или импульсную силу в направлении измерения динамометра, которая вызывает свободные затухающие колебания платформы, коэффициент демпфирования β определяют по затуханию амплитуды показаний динамометра Fa=F0exp(-βTn/4m), а собственную круговую частоту колебаний динамометра с платформой ω=2πƒ одним из известных методов, где Fa - амплитуда показаний динамометра; F0 - начальная амплитуда показаний динамометра; Т - период колебаний; n - целое число; ƒ - частота свободных колебаний платформы, далее полученные таким образом коэффициент демпфирования β и собственную круговую частоту колебаний динамометра с платформой ω используют для определения искомой массы движущегося объекта по формуле

где М - искомая масса движущегося объекта;
m - масса метрической части динамометра и платформы;
ω - собственная круговая частота колебаний динамометра с платформой;
ωL - собственная круговая частота колебаний динамометра с платформой и движущимся объектом;
β - коэффициент демпфирования динамометра.
| US 5585604 A, 17.12.1996 | |||
| Устройство для определения моментов инерции изделия | 1988 |
|
SU1562720A1 |
| Способ измерения массы груза | 1990 |
|
SU1789878A1 |
| Способ динамической градуировки динамометра | 1988 |
|
SU1610335A2 |
| Способ динамической тарировки динамометров | 1960 |
|
SU139852A1 |

