Изобретение относится к области навигации. Изобретение предназначено для определения углов тангажа и крена объектов при наличии вибраций.
Изобретение может применяться в навигационных системах летательных аппаратов, включая бесплатформенные инерциальные навигационные системы (БИНС), для определения нестационарных углов тангажа и крена моделей летательных аппаратов в аэродинамических трубах и различных движущихся объектов: автомобилей, судов, летательных аппаратов и т.д.
Известны устройства для измерения углов тангажа и крена, которые в общем случае называются датчиками для измерения углов. К ним относятся гироскопы и маятниковые акселерометры. Маятниковый акселерометр (см. Н.А. Горбачев, А.Р. Горбушин, Е.А. Крапивина, И.А. Судакова. Применение акселерометров для измерения углов тангажа и крена в аэродинамическом эксперименте. «Измерительная техника», №8, 2012, с. 25-28) состоит из маятника, изготовленного из плавленого кварца, металла или монокристаллического кремния, емкостного датчика угла, магнитоэлектрического датчика момента, масштабного резистора, включенного последовательно с катушкой обратной связи. Наличие маятника в акселерометрах позволяет использовать их для измерения углов тангажа и крена. Принцип измерения угла с помощью акселерометра заключается в измерении проекции ускорения свободного падения на ось чувствительности акселерометра. Для измерения угла тангажа акселерометр устанавливается таким образом, чтобы ось его чувствительности совпадала с осью фюзеляжа модели. Если ось чувствительности направить вдоль крыла, то в этом случае акселерометр будет измерять угол крена модели. Маятник является упругим элементом с демпфированием, обладающим собственной частотой колебаний. Недостатком аналога является то, что маятниковый акселерометр измеряет сумму составляющей ускорения свободного падения на ось чувствительности и нестационарное ускорение (вибрация), действующее на корпус акселерометра вдоль его оси чувствительности. При этом вибрация является погрешностью определения угла.
Известен способ определения углов тангажа и крена с помощью маятникового акселерометра и его уравнение измерения (см. Н.А. Горбачев, А.Р. Горбушин, Е.А. Крапивина, И.А. Судакова. Применение акселерометров для измерения углов тангажа и крена в аэродинамическом эксперименте. «Измерительная техника», №8, 2012, с. 25-28). Электрический сигнал акселерометра, измеренный с помощью вольтметра, подставляют в уравнение измерения и получают значения угла в физических единицах. Описанный способ не позволяет определять нестационарные углы тангажа и крена, применим только в случае, когда корпус акселерометра находится в инерциальной системе координат.
Прототипом изобретения на устройство и способ является патент «Метод и система для определения положения самолета с помощью многоосевых акселерометрических измерений», номер заявки на изобретение 13/408,749 от 29.02.2012 и соответствующий номер патента US 8,655,511 В2 от 18.02.2014. Предметом изобретения является инерциальная навигационная система на борту самолета, содержащая три пары акселерометров, расположенных попарно на трех взаимно перпендикулярных осях, проходящих через центр тяжести самолета. При этом оси парных акселерометров параллельны друг другу и перпендикулярны оси, на которой они располагаются. Кроме того, инерциальная навигационная система содержит вычислительные средства для реализации способа определения углов. Способ определения углового положения воздушного судна, заключающийся, по меньшей мере, в определении угла тангажа θ и/или угла курса ψ и/или угла крена ϕ указанного летательного аппарата, причем каждый из указанных углов ориентации определяется путем последовательного двойного интегрирования их второй производной, - при этом указанная вторая производная определяется как разность между измерениями ускорения, полученными двумя парными акселерометрами, деленная на сумму соответствующих расстояний между указанными акселерометрами. Предварительно исследуемый объект располагают под углами крена и тангажа, устанавливают на нем два акселерометра, находящиеся под воздействием ускорения свободного падения и вибраций, получают показания каждого из акселерометров.
Недостатками рассмотренного в прототипе способа являются:
1. углы тангажа и крена определяют последовательным двойным интегрированием по времени их второй производной от известного начального состояния, что приводит к понижению точности определения углов.
2. способ не позволяет определять углы тангажа и крена в произвольный момент времени.
Недостатком рассмотренного в прототипе устройства является то, что для повышения точности измерения углов тангажа и крена акселерометры следует размещать на большом расстоянии друг от друга.
Одной из важных задач в навигации является определение углов тангажа, рыскания и крена движущихся объектов, моделей летательных аппаратов в аэродинамических трубах. В навигационных системах летательных аппаратов, включая бесплатформенные инерциальные навигационные системы (БИНС), широкое распространение получили компенсационные маятниковые акселерометры, обладающие высокой чувствительностью. Эти акселерометры применяются и в аэродинамических трубах для измерения с высокой точностью углов тангажа и крена моделей летательных аппаратов и тензометрических весов, измеряющих нагрузки, которые действуют на эти модели. Маятниковые компенсационные акселерометры являются динамической системой. Этим обусловлена сложность решаемой проблемы: измерение динамических углов осуществляется динамической системой. Вторая задача, решаемая предлагаемой разработкой, относится к навигации судов и летательных аппаратов: измерение углов тангажа и крена при наличии вибраций.
Техническим результатом изобретения является повышение точности определения углов тангажа и/или крена с помощью маятниковых акселерометров при наличии вибраций с высокой точностью и обеспечение определения нестационарных углов тангажа и крена и в неинерциальной системе координат.
Технический результат достигается тем, что в способе определения нестационарных углов тангажа и крена, в котором исследуемый объект располагают под углами крена и тангажа, устанавливают на нем два акселерометра, находящиеся под воздействием ускорения свободного падения и вибраций, получают показания каждого из акселерометров, один из акселерометров закрепляют на другом, первом, причем в качестве первого акселерометра используют компенсационный маятниковый акселерометр, а для определения искомого угла используют формулу:

где θ - искомый угол тангажа или крена;
U - показания компенсационного маятникового акселерометра;
U0 - напряжение выходного сигнала при нулевом угле маятникового акселерометра;
 - первая и вторая производные по времени показаний компенсационного маятникового акселерометра;
- первая и вторая производные по времени показаний компенсационного маятникового акселерометра;
М - масса маятника;
K - коэффициент чувствительности компенсационного маятникового акселерометра;
β - коэффициент демпфирования компенсационного маятникового акселерометра;
ω0 - собственная круговая частота колебаний компенсационного маятникового акселерометра в отсутствии демпфирования;
 - ускорение корпуса компенсационного маятникового акселерометра, измеренное вторым акселерометром;
- ускорение корпуса компенсационного маятникового акселерометра, измеренное вторым акселерометром;
g - ускорение свободного падения.
Технический результат достигается также тем, что в устройстве для измерения нестационарных углов тангажа и крена, содержащем два акселерометра, в качестве одного из акселерометров используют компенсационный маятниковый акселерометр, а второй акселерометр прикреплен к основанию компенсационного маятникового акселерометра так, что их оси чувствительностей параллельны, и который измеряет только переменную составляющую ускорения, а его собственная частота не меньше чем в два раза превышает диапазон частот вибраций исследуемого объекта.
Перечень чертежей, иллюстрирующих предложенный способ и устройство:
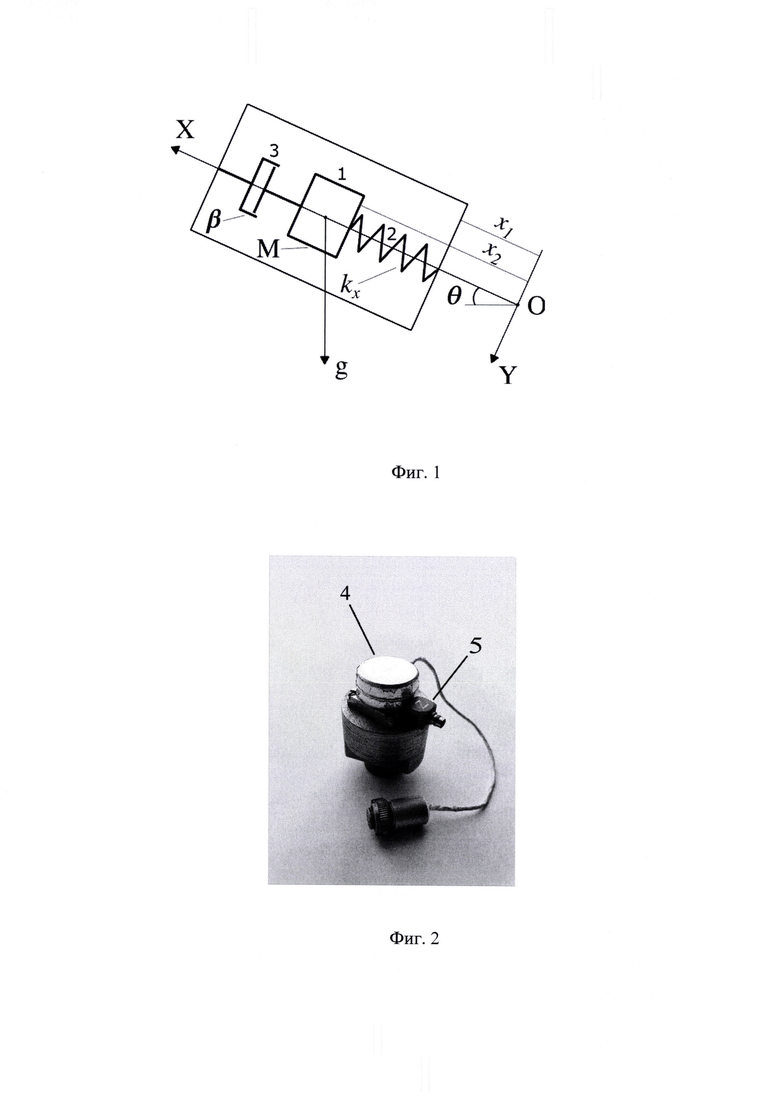
На фиг. 1 показана схема маятникового акселерометра и действующие на него ускорения.
На фиг. 2 показан маятниковый акселерометр, установленный на вибростенде. К основанию маятникового акселерометра прикреплен акселерометр, который не измеряет постоянную составляющую ускорения.
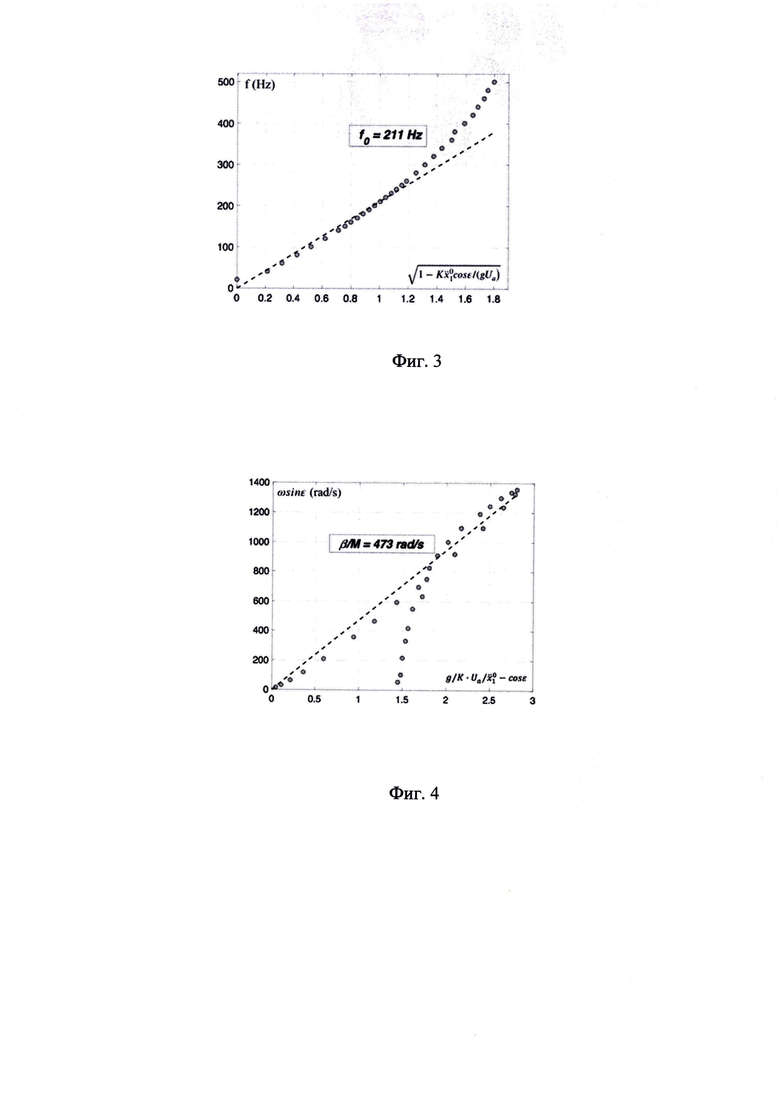
На фиг. 3 приведены результаты определения собственной частоты колебаний маятника маятникового акселерометра в отсутствии демпфирования (резонансной частоты) по результатам частотных испытаний на вибростенде.
На фиг. 4 приведены результаты определения отношение суммарного коэффициента демпфирования β к массе маятника М по результатам частотных испытаний на вибростенде.
На фигурах изображены:
1 - маятник;
2 - пружина;
3 - демпфер;
4 - маятниковый акселерометр;
5 - акселерометр.
На схемах приняты следующие обозначения и условно показаны:
М масса маятника;
kx - коэффициент жесткости пружины, моделирующей подвес маятника;
θ - угол тангажа или крена;
g - ускорение свободного падения;
β - суммарный коэффициент демпфирования подвеса и демпфирования в блоке электроники обратной связи;
ƒ0 - резонансная частота колебаний маятника;
ω0 - резонансная круговая частота колебаний маятника;
x1 - смещение корпуса маятникового акселерометра вдоль оси ОХ;
х2 - смещение маятника акселерометра вдоль оси ОХ;
OXYZ инерциальная система координат маятникового акселерометра.
Способ, на котором основано рассматриваемое изобретение, реализуется следующим образом:
1. К корпусу компенсационного маятникового акселерометра 4 прикрепляют акселерометр 5 для измерения ускорения корпуса маятникового акселерометра  . Акселерометр 5 прикреплен к основанию компенсационного маятникового акселерометра 5 так, что их оси чувствительностей параллельны. Он не измеряет постоянную составляющую ускорения, измеряет только переменную составляющую ускорения, а его собственная частота не меньше чем в два раза превышает диапазон частот вибраций исследуемого объекта в направлении измерения маятникового акселерометра.
. Акселерометр 5 прикреплен к основанию компенсационного маятникового акселерометра 5 так, что их оси чувствительностей параллельны. Он не измеряет постоянную составляющую ускорения, измеряет только переменную составляющую ускорения, а его собственная частота не меньше чем в два раза превышает диапазон частот вибраций исследуемого объекта в направлении измерения маятникового акселерометра.
2. Коэффициент чувствительности K и напряжение выходного сигнала U0 маятникового акселерометра определяют при статической калибровке маятникового акселерометра. Более подробно этот метод изложен в статье: Н.А. Горбачев, А.Р. Горбушин, Е.А. Крапивина, И.А. Судакова. Применение акселерометров для измерения углов тангажа и крена в аэродинамическом эксперименте. «Измерительная техника», №8, 2012, с. 25-28.
3. Собственную круговую частоту колебаний маятника на подвесе в отсутствие демпфирования ω0 и отношение суммарного коэффициента демпфирования β к массе маятника М определяют по результатам вынужденных установившихся гармонических колебаний маятникового акселерометра на вибростенде с использованием уравнений:

где ε - разность фаз колебаний маятника акселерометра и его корпуса;
 - амплитуда ускорения колебаний корпуса маятникового акселерометра;
- амплитуда ускорения колебаний корпуса маятникового акселерометра;
Ua - амплитуда колебаний показаний маятникового акселерометра.
4. Искомый нестационарный угол тангажа или крена определяют по формуле: 
где  - первая и вторая производные по времени показаний маятникового акселерометра.
- первая и вторая производные по времени показаний маятникового акселерометра.
где θ - искомый угол тангажа или крена;
U - показания компенсационного маятникового акселерометра;
U0 - напряжение выходного сигнала при нулевом угле маятникового акселерометра;
 - первая и вторая производные по времени показаний компенсационного маятникового акселерометра; М - масса маятника;
- первая и вторая производные по времени показаний компенсационного маятникового акселерометра; М - масса маятника;
K - коэффициент чувствительности компенсационного маятникового акселерометра;
β - коэффициент демпфирования компенсационного маятникового акселерометра;
ω0 - собственная круговая частота колебаний компенсационного маятникового акселерометра в отсутствии демпфирования;
- ускорение корпуса компенсационного маятникового акселерометра, измеренное вторым акселерометром;
g - ускорение свободного падения.
Устройство, на котором основано рассматриваемое изобретение, реализуется следующим образом. В исследуемый объект, расположенный под углами крена и тангажа относительно нормальной системы координат, устанавливают два акселерометра, находящиеся под воздействием ускорения свободного падения и вибраций, действующих на исследуемый объект, получают показания каждого из акселерометров. В качестве первого акселерометра используют компенсационный маятниковый акселерометр 4. К основанию компенсационного маятникового акселерометра 4 прикрепляют второй акселерометр 5 так, что их оси чувствительностей параллельны. Он не измеряет постоянную составляющую ускорения, измеряет только переменную составляющую ускорения, а его собственная частота не меньше чем в два раза превышает диапазон частот вибраций исследуемого объекта.
Достоинства предлагаемого способа определения нестационарных углов тангажа и крена и устройства, его реализующего, состоят в следующем:
1. Способ позволяет определять нестационарные углы тангажа и/или крена с высокой точностью.
2. Способ позволяет определять углы в широком диапазоне частот вибраций, действующих на акселерометры, включая и собственную частоту колебаний маятникового акселерометра. Это обеспечивается акселерометром, установленным на основании маятникового акселерометра.
3. Искомый угол тангажа или крена может быть определен в любой произвольный момент времени; требуются лишь результаты измерений в окрестности заданного момента времени для вычисления первой и второй производных по времени от сигнала маятникового акселерометра.
Наличие перечисленных выше достоинств предлагаемого способа определения нестационарных углов тангажа и крена и предлагаемого устройства повышает точность измерений и обеспечивает определение нестационарных углов тангажа и крена и в неинерциальной системе координат. Получено подтверждение результатами экспериментальных исследований.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕСТАЦИОНАРНОЙ СИЛЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2743778C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ДВИЖУЩЕГОСЯ ОБЪЕКТА (ВАРИАНТЫ) | 2022 |
|
RU2805536C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ДВИЖУЩЕГОСЯ ОБЪЕКТА (ВАРИАНТЫ) | 2022 |
|
RU2805127C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
Группа изобретений относится к способу и устройству для определения нестационарных углов крена и тангажа. Для определения нестационарных углов крена и тангажа объекта устанавливают на нем два акселерометра, один из которых является маятниковым компенсационным акселерометром, получают показания каждого из них, при этом для определения искомых углов используют определенную математическую формулу, используя полученные показания и известные параметры акселерометров. Устройство содержит два вышеуказанных акселерометра, при этом второй акселерометр прикреплен к основанию компенсационного маятникового акселерометра так, что их оси чувствительностей параллельны, и он измеряет только переменную составляющую ускорения, а его собственная частота не меньше чем в два раза превышает диапазон частот вибраций исследуемого объекта. Обеспечивается повышение точности определения углов тангажа и крена с помощью маятниковых акселерометров при наличии вибраций с высокой точностью, в том числе в неинерциальной системе координат. 2 н.п. ф-лы, 4 ил.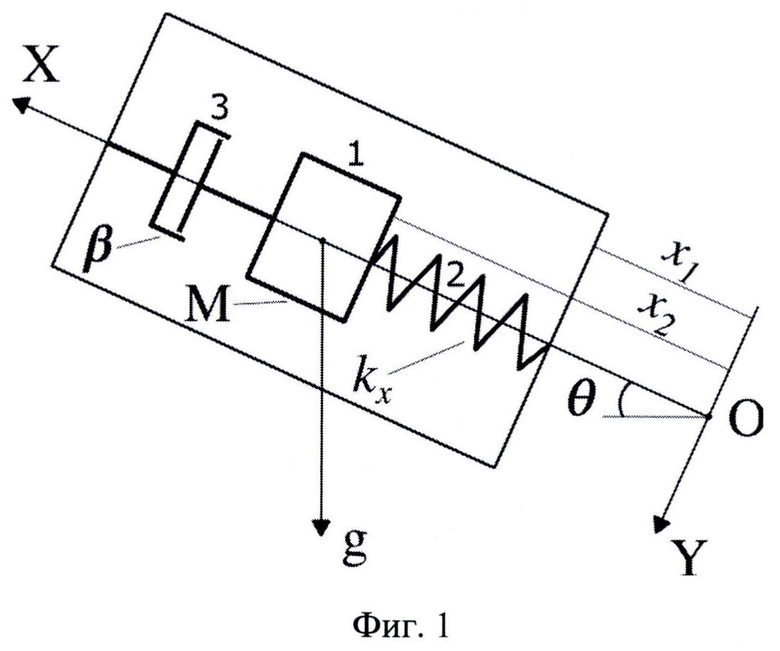
1. Способ определения нестационарных углов тангажа и крена, в котором исследуемый объект располагают под углами крена и тангажа, устанавливают на нем два акселерометра, находящиеся под воздействием ускорения свободного падения и вибраций, получают показания каждого из акселерометров, отличающийся тем, что в нем один из акселерометров закрепляют на другом, первом, причем в качестве первого акселерометра используют компенсационный маятниковый акселерометр, а для определения искомого угла используют формулу

где θ - искомый угол тангажа или крена;
U - показания компенсационного маятникового акселерометра;
U0 - напряжение выходного сигнала при нулевом угле маятникового акселерометра;
 - первая и вторая производные по времени показаний компенсационного маятникового акселерометра;
- первая и вторая производные по времени показаний компенсационного маятникового акселерометра;
М - масса маятника;
K - коэффициент чувствительности компенсационного маятникового акселерометра;
β - коэффициент демпфирования компенсационного маятникового акселерометра;
ω0 - собственная круговая частота колебаний компенсационного маятникового акселерометра в отсутствие демпфирования;
 - ускорение корпуса компенсационного маятникового акселерометра, измеренное вторым акселерометром;
- ускорение корпуса компенсационного маятникового акселерометра, измеренное вторым акселерометром;
g - ускорение свободного падения.
2. Устройство для измерения нестационарных углов тангажа и крена, содержащее два акселерометра, отличающееся тем, что в качестве одного из акселерометров используют компенсационный маятниковый акселерометр, второй акселерометр прикреплен к основанию компенсационного маятникового акселерометра так, что их оси чувствительностей параллельны, и который измеряет только переменную составляющую ускорения, а его собственная частота не меньше чем в два раза превышает диапазон частот вибраций исследуемого объекта.
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121693C1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| CN 105698765 A, 22.06.2016 | |||
| CN 101476894 B, 29.06.2011. | |||

