Изобретение относится к авиации и касается конструкции транспортных самолетов вертикального взлета и посадки (СВВП).
Развитие двигателестроения в настоящее время позволяет думать о возможности и целесообразности применения СВВП не только в военной, но в транспортной авиации. Рассматривая известные схемы СВВП с точки зрения задачи экономически целесообразной и безопасной перевозки грузов и пассажиров, отбросим сразу схемы с подъемными или маршевыми турбореактивными двигателями с поворотными соплами, как не удовлетворяющие требованиям экономичности и безопасности (например, схема самолета ЯК-18). Турбовентиляторные двигатели, которые можно рассматривать как двухконтурные турбореактивные с высокой степенью двухконтурности, решают задачу создания подъемной силы экономичнее, т.к. захватывают большее сечение потока воздуха. Однако по своему принципу действия вентилятор является турбомашиной и отличается от воздушного винта наличием диффузора, который создает уменьшение скорости набегающего потока воздуха на входе в лопаточный аппарат. Но это необходимо только для экономичного создания силы тяги при субзвуковых скоростях набегающего потока, чтобы, в сумме с окружными скоростями лопаток, скорости не превысили скорость звука и не возникало бы явлений волнового кризиса при обтекании лопаток. Но это достигается ценой установки громоздкого диффузора в виде мотогондолы увеличенного диаметра, которая препятствует дальнейшему увеличению диаметра захватываемого потока воздуха, которое необходимо для создания тяги, превышающей вес самолета. Это делает режим вертикального взлета самолетов с турбовентиляторными двигателями, например, с поворотными маршевыми - неэкономичным. Для уменьшения расхода топлива на режиме взлета и посадки требуется дополнительное увеличение диаметра входного потока воздуха, чтобы уменьшить индуктивную мощность в режиме висения. Достигается это только при использовании воздушного винта - причем открытого. Практика применения винтов в кожухе (в тоннеле), несмотря на то, что их эффективное сечение вдвое больше, чем у открытого винта такого же диаметра, не оправдывает их применение в качестве подъемных винтов, т.к. кожух - это довольно громоздкая конструкция, которая не только утяжеляет летательный аппарат, но и ухудшает его аэродинамику.
Неплохие расчетные показатели по экономичности безопасности полета имеют место для схемы СВВП по патенту RU №2742496, приоритет от 9.11.2018 г, автор и заявитель А.А. Горшков. В данной схеме СВВП содержится фюзеляж, в хвостовом обтекателе которого, оборудованном механизмом раскрывания, расположено складывающееся хвостовое шасси, выполняющее также функцию посадочного амортизатора. В носовой части фюзеляжа расположен открытый воздушный винт изменяемого шага, снабженный механизмом управления циклическим шагом лопастей воздушного винта, называемым также автоматом перекоса, аналогичным применяемому в несущих винтах вертолетов. При этом ось винта расположена вдоль продольной оси фюзеляжа. Имеется также крыло с элеронами, которые используются не только для управления креном в режиме горизонтального полета, но и для компенсации реактивного момента двигателя. Крыло может также быть оборудовано закрылками, применяемыми для снижения скорости полета, при которой возможно переложить всю весовую нагрузку с воздушного винта на крыло. В частном варианте выполнения, закрылки могут быть конструктивно совмещены с элеронами дифференциального (двухпараметрического) управления. Крыло может, в частности, быть прикреплено к верхней части фюзеляжа (высокоплан). Для обеспечения безопасной посадки при отказе техники используется амортизатор шасси и парашют, расположенный в носовом обтекателе фюзеляжа перед винтом.
Автомат перекоса обеспечивает управление по курсу и тангажу на всех этапах полета, включая вертикальный взлет и посадку, а также горизонтальный полет и переходные эволюции. Таким образом устраняется необходимость в хвостовом оперенье, чем не только обеспечивается возможность установки хвостового шасси, но также уменьшается аэродинамическое сопротивление, что позволяет увеличить максимальную скорость горизонтального полета СВВП, уменьшить расход топлива и увеличить дальность полета, доведя эти параметры полета до величин, характерных для транспортных самолетов с пропеллерной тягой. Средний расход топлива в СВВП такой схемы в транспортных перевозках на расстояния более 10-30 км, несмотря на большие мощности двигателя при взлете и посадке, оценивается, как не превышающий средний расход топлива на автомобильном транспорте.
Недостатками данной схемы СВВП, которые могут замедлить широкое распространение СВВП в транспортной авиации, несмотря на большие экономические преимущества, появляющиеся в связи с устранением необходимости в аэродромах и устранением необходимости затрат на строительство и содержание дорожной сети, являются:
1. Сравнительная сложность конструкции механизма хвостового шасси, включающего в себя механизм раскрывания и закрывания хвостового обтекателя, механизм убирания шасси под хвостовой обтекатель, а также механизмы штатной и аварийной посадочной амортизации.
2. Необходимость выполнения предпосадочной эволюции траектории полета путем кабрирования для перехода в вертолетный режим снижения. Это требует использования большого диапазона высот, что проблематично при массовом использовании его в населенной местности.
3. Неудобство, вызываемое необходимостью кантования кабины при влете и посадке. К этому можно привыкнуть, как мы привыкли к современным автомобилям, посадка в которые чрезвычайно неудобна по сравнению с посадкой, например, в карету или в автобус(где не приходится пригибаться и подгибать ноги, чтобы влезть в дверной проем). Психологически, это требует времени на привыкание.
Целью изобретения является устранение указанных недостатков СВВП, управляемого автоматом перекоса воздушного винта, а именно: упрощение конструкции, устранение необходимости предпосадочной эволюции кабрированием, а также устранение необходимости кантования кабины при влете и посадке.
Предлагается СВВП, содержащий фюзеляж с хвостовым обтекатем конической формы с заострением на конце и не имеющий хвостового оперенья. В носовой части обтекателя расположен воздушный винт изменяемого шага, ось которого расположена вдоль продольной оси фюзеляжа. Причем воздушный винт оборудован автоматом перекоса. В средней части фюзеляжа содержится крыло высокого расположения (высокоплан), оборудованное закрылками. Цель изобретения достигается тем, что в носовой части к фюзеляжу прикреплены две поверхности аэродинамического профиля с отклоняемой задней кромкой, выполняющие функцию элеронов. Назовем их рулевыми плоскостями. Они располагаются в нижнем секторе окружности ометания указанного воздушного винта так, чтобы концевые точки указанных рулевых поверхностей, в сочетании с вершиной конического хвостового обтекателя фюзеляжа, могли служить стояночной опорой фюзеляжа, при которой воздушный винт не задевает за землю. При этом угол возможного отклонения закрылков должен доходить до 90 градусов, чтобы попадающая на закрылки часть сечения струи воздушного винта отклонялась по направлению, близкому к вертикали, создавая подъемную силу, способную поднять самолет. Некоторая потеря тяги при таком способе отклонения потока воздуха от винта компенсируется эффектом воздушной подушки от близости к земле, а также возможностью использовать часть запаса тяговооруженности, предназначенного для вертикального ускорения аппарата. Разгон по горизонтали начнется одновременно с отрывом от земли. Так что путь скольжения стояночных опор по земле будет небольшой. Направление, в котором начинает разгоняться аппарат, определяется направлением отклонения суммарной подъемной силы от вертикали, которое определяется расчетной установкой закрылков до старта. Запуск двигателя производится при установке воздушного винта на нулевой шаг с последующим быстрым его введением. При этом опоры с самого начала разгона будут разгружены, и можно будет обойтись без колесного шасси. При этом управление, на всем протяжении процесса разгона с одновременным набором высоты, а также на режиме зависания перед посадкой, производится автоматом перекоса воздушного винта, создающего управляемые моменты силы по тангажу и рысканию, а также указанными выше рулевыми плоскостями, создающими управляемые моменты по крену, компенсирующие также реактивный момент от двигателя. При этом гироскопические моменты воздушного винта создают дополнительную стабилизацию угловой ориентации оси фюзеляжа и эти силы учитываются при выработке величин текущего положения установки органов автомата перекоса, что производится вычислительной системой, установленной в канале передачи сигналов от ручек управления или от автопилота на автомат перекоса. Управление величиной и направлением подъемной силы, определяющей (за вычетом ускорения силы тяжести) величину и направление ускорения аппарата, производится согласованным изменением шага воздушного винта (при работе стабилизатора числа его оборотов), а также изменением угла отклонения закрылков. Таким образом, аппарат на всех этапах полета обеспечен полным управлением по всем шести степеням свободы. При этом отказ двигателя является критичным для безопасности при полете с малой скоростью и, одновременно, на малой высоте. Следует ограничивать время пребывания аппарата в указанной критической зоне. В случае отказа двигателя или системы управления на малой высоте и, одновременно, при малой скорости полета, для легкого СВВП может применяеться парашют, оборудованный системой заброса и принудительного развертывания купола. Это проще и безопаснее направленного вверх катапультирования пилота с креслом, применяемого в военных самолетах. Указанный парашют может быть размещен в центроплане крыла. Если же колеса шасси имеются, то аварийное приземление может производиться по-самолетному - с пробегом.
Таким образом, по сравнению с прототипом, мы имеем упрощение конструкции, обусловленное устранением сравнительно сложного механизма убираемого в полете хвостового шасси. Также устраняется необходимость в кабрировании для перехода от горизонтального полета в режим вертикальной посадки. Также, на протяжении всего полетного цикла, обеспечивается близкая к горизонтальной ориентация фюзеляжа, что удобно для пассажиров и для грузовых операций. Улучшается обзор из кабины при взлете и посадке.
Изобретение поясняется нижеследующим детальным описанием примера выполнения и шестью фигурами.
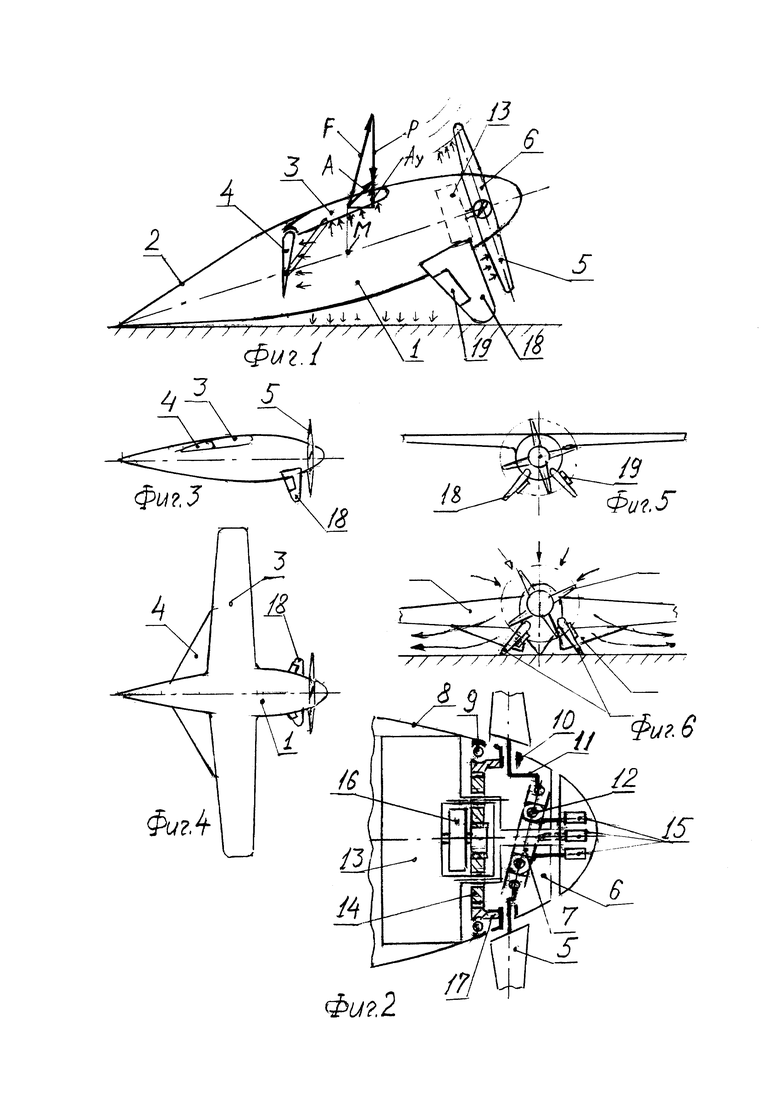
На фиг. 1 изображен общий вид предлагаемого СВВП в стояночной (она же взлетная и посадочная) конфигурации. Стрелками показано распределение давлений на различные части аппарата, ответственные за создание воздушной подушки при взлете и посадке, а также давление на криволинейные потоки воздуха, между винтом и крылом, и на землю.
На фиг. 2 изображена схема применяемого автомата перекоса.
На фиг. 3 показана конфигурация предлагаемого СВВП в процессе горизонтального полета.
На фиг. 4 изображена вторая проекция общего вида в той же конфигурации - вид сверху.
На фиг. 5 изображена третья проекция общего вид в той же конфигурации СВВП - вид спереди.
На фиг. 6 показаны потоки воздуха от воздушного винта при взлете и посадке.
Перечень позиций на чертежах:
1 - фюзеляж, 2 - хвостовой обтекатель, 3 - крыло, 4 - закрылки, 5 - воздушный винт, 6 - втулка воздушного винта с автоматом перекоса, 7 - тарелка автомата перекоса, 8 - оболочка фюзеляжа, 9 - подшипник втулки воздушного винта, 10 - шарнир крепления лопасти, обеспечивающий управление углом атаки лопасти, 11 - рычаг, закрепленный на лопасти, служащий для управления углом атаки лопасти, 12 - подшипник тарелки автомата перекоса, 13 - двигатель, 14 - шестерни многопоточного редуктора воздушного винта, 15 - сервоэлектроприводы автомата перекоса, 16 - муфта обгона, 17 - зубчатый венец, закрепленный на втулке и служащий для привода вращения воздушного винта, 18 - рулевая плоскость, 19 - отклоняемые элементы задней кромки рулевой плоскости.
Предлагаемый самолет содержит фюзеляж 1 с профилем, имеющим носовое скругление, плавно переходящее в широкую часть, в которой помещается кабина, и заканчивающийся хвостовым обтекателем 2, имеющим форму конуса с заострением на конце. Крыло 3 прикреплено к верхней части фюзеляжа и снабжено закрылками 4. Верхнее расположение крыла удобно для размещения дверей, а также обеспечивает возможность отклонения большей части потока воздуха винта опущенными закрылками 4. Увеличение создаваемой таким образом подъемной силы для вертикального взлета обеспечивается увеличенной площадью закрылков 4 в прикорневой части крыла, а также возможностью отклонения закрылков на угол, доходящий до 90 градусов.
Воздушный винт 5 расположен в носовой части фюзеляжа и оборудован механизмом изменения общего шага, а также автоматом перекоса, помещающимся во втулке 6 воздушного винта. Принцип действия автомата перекоса аналогичен автомату перекоса втулок несущих винтов вертолетов. Однако наибольшей компактностью обладает втулка с автоматом перекоса, выполненная в соответствии с патентом RU №2746024. Схема его изображена на фиг. 2. Автомат перекоса выполняет заодно и функцию механизма управления общим шагом винта. Тарелка 7 автомата перекоса расположена в центре втулки 6 винта. Втулка 6 опирается на край оболочки 8 фюзеляжа посредством подшипника 9. Лопасти винта установлены во втулке на шарнирах 10, обеспечивающих возможность изменения угла атаки лопасти (т.е. изменения шага винта). Для этого каждая лопасть снабжена рычагом 11, находящимся в подвижном соединении с тарелкой 7 посредством подшипника 12. Тарелка 7 базируется на двигателе 13 посредством цепи механических связей, проходящей через оси шестерен 14 редуктора двигателя. Тарелка 7 управляется по осевому перемещению, а также по двум углам перекоса посредством трех сервоэлектроприводов 15. Привод вращения воздушного винта осуществляется двигателем 13 -турбовальным или поршневым. В кинематическую цепь трансмиссии входит обгонная муфта 16, необходимая для обеспечения авторотации винта при выключении двигателя, а также закрепленный на втулке 6 винта зубчатый венец 17, входящий в зацепление с выходными шестернями 14 многопоточной зубчатой передачи.
Для управления аппаратом по углу крена в носовой части фюзеляжа закреплены две рулевые плоскости 18, аналогичные плоскостям хвостового оперенья обычного самолета. Аэродинамический профиль их снабжен отклоняемыми поверхностями 19, аналогичными рулям хвостового оперенья обычного самолета. Однако в данном случае они выполняют функцию элеронов. Рулевые плоскости 18 расположены в максимально возможной близости от плоскости ометания воздушного винта 5, что необходимо, чтобы исключить возможность задевания винтом за землю при всех возможных углах встречи с землей при посадке.
Шасси в изображенном варианте конструктивного выполнения заменено простыми стояночными опорами, функцию которых выполняют концы рулевых плоскостей 18, а также хвостовая часть фюзеляжа. Колеса могут быть установлены на концах рулевых плоскостей 18. Однако их нельзя будет убирать в фюзеляж, т.к. рулевые плоскости выполняют функцию управления по крену вместо элеронов. В предлагаемом СВВП, в котором закрылки при взлете и посадке необходимо отклонять на углы 90 градусов и более, прикорневые зоны закрылков не могут выполнять также и функцию элеронов. Элероны на концах крыла при этом не обдуваются воздухом винта. Поэтому, в данном СВВП, они располагаются на специальных рулевых плоскостях 18, которые обдуваются потоком воздуха от винта 6 всегда, когда винт создает крутящий момент, а, следовательно, тогда, когда требуется компенсировать его реактивный момент.
Функционирует предлагаемый СВВП следующим образом. Самолет на стоянке (см. фиг. 1) опирается на землю тремя точками: вершиной конуса хвостового обтекателя, а также концами рулевых плоскостей 18. Продольная центровка самолета перед стартом производится по центру подъемной силы, который должен проектироваться на центр массы М самолета по вертикали на стоянке. Корректировка центровки возможна смещением грузов или сидений. Отклонения по центровке при всех эволюциях должны находиться в пределах, допускаемых располагаемым моментом автомата перекоса.
Двигатель 13 запускают при нулевом шаге винта, включая автомат стабилизации числа оборотов. Затем опускают закрылки 4 на заранее известный угол, при котором подъемная сила F, создаваемая воздушной подушкой, образуемой винтом 5 и отклоненными закрылками 4, имеет небольшое отклонение от вертикали вперед (см. фиг. 1). Затем резко вводят шаг винта в положение максимальной тяги, превышающей вес Р. При этом опирание аппарата на землю прекратится, и он начнет ускоряться вверх и вперед под углом к горизонту, зависящим от избытка тяговооруженности. Например, если тяговооруженность равна 1,5, то избыток тяговооруженности равен 0.5. При этом ускорение Ау аппарата вверх составит 5 м/сек2. Угол наклона траектории взлета при этом будет около 45 градусов. При этом управление по крену производится отклонением шарнирных частей 19 рулевых плоскостей 18, которые воспринимают реактивный момент воздушного винта, начиная с нулевой скорости полета, а управление по тангажу и рысканию производится за счет моментов, создаваемых автоматом перекоса воздушного винта. Ввиду того, что диаметр винта для получения высокой тяговооруженности должен быть больше, чем у обычных самолетов, на работе системы управления сказывается значительный гироскопический момент воздушного винта, который выполняет также функцию дополнительной стабилизации ориентации оси фюзеляжа в пространстве. При этом продольная ось фюзеляжа реагирует на создаваемые автоматом перекоса моменты не угловым ускорением, а угловой скоростью (по крайней мере, частично), что упрощает динамику управления, придавая ей частично свойства динамической системы первого порядка по перемещению (в отличие от обычных динамических систем, являющихся системами второго порядка). Таким образом, все функции управления самолетом осуществляются за счет воздушного винта 5, который используется также и для создания тяги.
При этом следует учитывать вышеуказанное влияние гироскопического эффекта винта, из-за которого возникает связь между каналами управления по тангажу и рысканию. Учесть эти связи возможно включением в контур управления автоматических бустерных (т.е. промежуточных) систем, которые в настоящее время широко применяются для управления самолетами со статической неустойчивостью (т.е. с невозможностью поддерживать стабильные параметры полета с «брошенной ручкой»).
По мере набора скорости плавно убирают закрылки 4. Дальнейший горизонтальный полет производится, как у обычных винтовых самолетов. Для посадки - плавно снижают высоту и скорость при плавном введении закрылков для поддержания несущей способности крыла. При этом возможно торможение винтом 5. На всех режимах полета лопасти винта продолжают создавать управляющие моменты за счет отклонения тарелки 8 автомата перекоса (в том числе и в режимах торможения и флюгерной авторотации). Этим обеспечивается эффективное действие стабилизации аппарата по тангажу и рысканию при углах атаки, близких к критическим. Управление креном также сохраняется на всех режимах полета, т.к. при любых скоростях полета рулевые плоскости 18 обдуваются либо винтом, либо набегающим потоком воздуха. Это особенно важно при малых и нулевых скоростях полета. При этом обдув рулевых плоскостей 18, особенно винтом 5, особенно сильный, т.к. винт должен при этом создавать подъемную силу, равную весу. Перед посадкой реализуется режим зависания, контролируемый согласованным оперативным управлением величины отклонения закрылков 4 и изменением общего шага винта. При этом возможно и движение СВВП задним ходом, т.к. суммарное давление создаваемых воздушным винтом потоков на отклоненные закрылки 4 вблизи земли повышается из-за эффекта воздушной подушки.
Изобретение относится к авиации и касается конструкции самолетов вертикального взлета и посадки (СВВП). СВВП содержит фюзеляж, в носовой части которого расположен воздушный винт изменяемого шага, ось которого расположена вдоль продольной оси фюзеляжа, оборудованный автоматом перекоса, крыло высокого расположения с закрылками. В носовой части к фюзеляжу прикреплены две рулевые плоскости аэродинамического профиля с отклоняемой задней кромкой, выполняющие функцию элеронов и располагающиеся в нижнем секторе окружности ометания указанного воздушного винта, образующие также стояночную опору фюзеляжа, исключающую задевание воздушного винта за землю. Обеспечивается упрощение конструкции, устранение необходимости предпосадочной эволюции кабрированием, а также устранение необходимости кантования кабины при влете и посадке. 6 ил.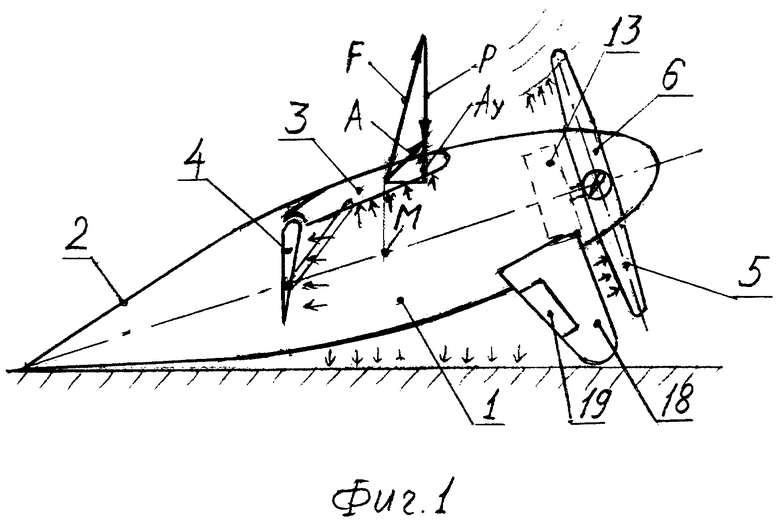
Самолет вертикального взлета и посадки, содержащий фюзеляж, в носовой части которого расположен воздушный винт изменяемого шага, ось которого расположена вдоль продольной оси фюзеляжа, оборудованный автоматом перекоса, а также содержащий крыло высокого расположения с закрылками, отличающийся тем, что в носовой части к фюзеляжу прикреплены две рулевые плоскости аэродинамического профиля с отклоняемой задней кромкой, выполняющие функцию элеронов и располагающиеся в нижнем секторе окружности ометания указанного воздушного винта, образующие также стояночную опору фюзеляжа, исключающую задевание воздушного винта за землю.
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| СПОСОБ ПРОИЗВОДСТВА КЕКСОВ | 2023 |
|
RU2830237C1 |
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ "ПУШ-ПУЛЕТ" | 2009 |
|
RU2412869C1 |
| US 5289994 A1, 01.03.1994 | |||
| Самолет вертикального ультракороткого взлета и посадки | 1989 |
|
SU1839153A1 |

