Изобретение относится к измерительной технике, в частности к области оптического измерения линейных размеров объекта.
Из уровня техники известно устройство для измерения габаритных характеристик объекта, раскрытое в документе RU 214940 U1, опубликованном 22.11.2022. Данное устройство содержит корпус с платформой, опоры и угловой ограничитель, установленный в углу корпуса и предназначенный для предотвращения касания объекта и корпуса между собой, внутри корпуса размещен терминал для передачи данных с платформы головному устройству с сенсорным LCD экраном и блоком питания, на корпусе установлено, по меньшей мере, три ультразвуковых датчика и по меньшей мере три лазерных датчика для измерения габаритных характеристик объекта в трех измерениях по осям X, Y, Z, при этом стенки корпуса снабжены, по меньшей мере, тремя магнитными уголками для обозначения и фиксации крайних точек измеряемого объекта неправильной формы.
Недостатком данного устройства является наличие ультразвуковых датчиков, показания которых зависят от вещества, из которого выполнен измеряемый объект.
Также из уровня техники известно устройство для измерения габаритных размеров объекта, раскрытое в документе US 10775165 B2, опубликованном 15.09.2020. Данное устройство содержит проектор узора, сконфигурированный для проецирования узора на объект в окружающей среде; дальномерную камеру, сконфигурированную для захвата изображения узора на объекте и сбора трехмерных (3D) данных, соответствующих объекту; память, сконфигурированную для хранения библиотеки моделей ошибок; и процессор, выполненный с возможностью выбирать конкретное измерение оцениваемого объекта. При этом получают значения для одной или нескольких переменных-предикторов, причем переменные-предикторы описывают аспекты измерения системы измерения конкретного измерения. Создают, используя трехмерные данные, собранные камерой дальности, промежуточную оценку конкретного измерения. Извлекают из библиотеки моделей ошибок, хранящейся в памяти, модель ошибки, соответствующую конкретному измерению. Вычисляют, используя модель ошибок и значения для одной или нескольких переменных-предикторов, оценку ошибки для конкретного измерения. Вычитают оценку ошибки из промежуточной оценки, чтобы получить окончательную оценку конкретного измерения.
Недостатками данного решения являются наличие проектора, а также необходимость создания для каждого объекта своего узора для коррекции ошибок.
Также из уровня техники известно устройство для измерения габаритных размеров объектов, раскрытое в документе CN 211527339 U, опубликованном 18.09.2020. Данное решение содержит платформу автоматизированного трехмерного сканирования, на которой размещены поворотный стол, механическая рука и компьютер. Поворотный стол и механическая рука электрически соединены с компьютером. Сканер жестко соединен с механической рукой и размещен напротив поворотного стола. Сканер включает в себя корпус и поддон, причем поддон закреплен на корпусе, а в корпусе закреплена перегородка. Платформа автоматизированного трехмерного сканирования содержит также фиксирующую пластину подсветки, которая неподвижно соединена с корпусом.
Недостатком данного решения является значительная погрешность измерения.
Решение, раскрытое в CN 211527339 U, выбрано в качестве прототипа заявленного изобретения.
Задачей настоящего изобретения является устранение недостатков прототипа.
Технический результат заключается в повышении точности измерения линейных размеров объекта.
Технический результат достигается за счет того, что автоматизированная система определения габаритов объекта содержит камеру глубины, которая выполнена с возможностью передачи информации модулю обработки данных от камеры глубины, а модуль обработки данных от камеры глубины выполнен с возможностью передачи данных модулю анализа масок измеряемых областей в бинаризованных матрицах.
За счет использования камеры глубины, модуля обработки данных от камеры глубины, а также за счет использования модуля анализа масок измеряемых областей в бинаризованных матрицах значительно повышается точность измерения линейных размеров объекта.
Дополнительно автоматизированная система измерения линейных размеров объекта может содержать инфракрасную камеру и модуль обработки данных, выполненный с возможностью получения данных от инфракрасной камеры. При этом модуль обработки данных от камеры глубины выполнен с возможностью передачи данных модулю анализа масок измеряемых областей в бинаризованных матрицах.
Таким образом, за счет совместной обработки снимков, полученных с помощью камеры глубины и инфракрасной камеры обеспечивается еще бóльшая точность измерения линейных размеров объекта.
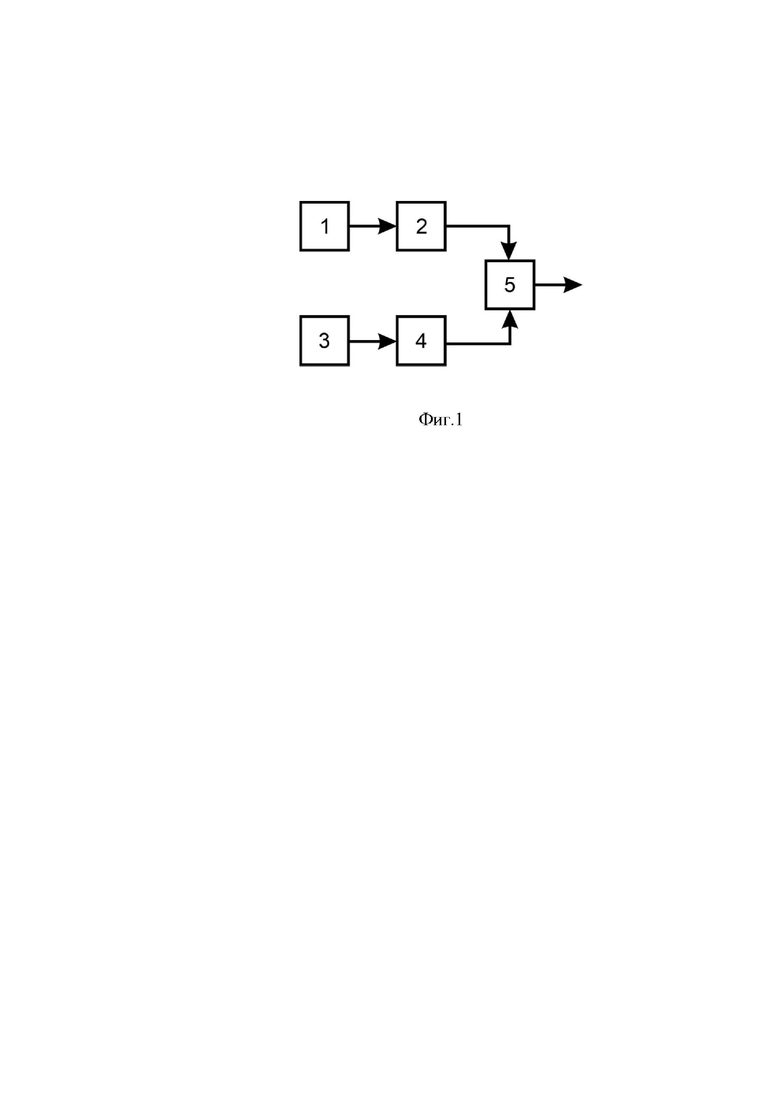
На фиг.1 изображена автоматизированная система измерения габаритных размеров объекта.
На фигуре обозначено: 1 - камера глубины, 2 - модуль обработки данных от камеры глубины, 3 - инфракрасная камера, 4 - модуль обработки данных от инфракрасной камеры, 5 - модуль анализа масок измеряемых областей в бинаризованных матрицах.
Автоматизированная система работает следующим образом.
Камера глубины 1 делает снимок объекта и передает его в модуль обработки данных от камеры глубины 2. В данном модуле снимок проходит процедуру последовательной фильтрации следующими фильтрами:
- фильтром интересующего диапазона высот;
- фильтром преобразования в градации серого;
- фильтром размытия по Гауссу;
- фильтром порога;
- фильтром бинаризации данных.
После фильтрации можно явно определить в каких точках кадра имеются границы объекта. Бинаризованная матрица кадра отправляется модулю анализа масок измеряемых областей в бинаризованных матрицах 5.
Важно заметить, что настройки фильтров устанавливаются динамически при запуске модуля.
Параллельно с этим инфракрасная камера 3 делает снимок объекта и передает его в модуль обработки данных от инфракрасной камеры 4. В данном модуле снимок проходит процедуру последовательной фильтрации следующими фильтрами:
- фильтром размытия по Гауссу;
- фильтром детектора границ Канни;
- фильтром порога с методом обнаружения Оцу;
- фильтром бинаризации данных.
После фильтрации можно явно определить в каких точках кадра имеются границы объекта. Бинаризованная матрица кадра отправляется модулю анализа масок измеряемых областей в бинаризованных матрицах 5.
Важно заметить, что настройки фильтров устанавливаются динамически при запуске модуля.
После получения модулем 5 бинаризованных матриц кадров от модулей 2 и 4 выполняется обход граничных точек периметров интересующих областей с целью определения толщин линий, описывающих периметры, их плавность и динамику изменения толщины. Те есть, на данном этапе модуль 5 получает информацию о двух бинаризованных матрицах. Данная информация сравнивается статистической функцией с константными значениями порогов, выбирается среднее значение по каждому параметру и в конечном итоге формируется новая бинаризованная матрица. Последняя является компиляцией первых двух матриц. В результирующей матрице определяется маска, повторяющая контуры интересующей области. Данная маска приводится к описывающему прямоугольнику, размеры которого передаются в качестве выходных данных вычисленных габаритных размеров измеряемого объекта.
В случае использования только камеры глубины модуль 5 работает следующим образом.
После получения модулем 5 бинаризованной матрицы кадра от модуля 2 выполняется обход граничных точек периметра интересующей области с целью определения толщины линии, описывающей периметр, ее плавность и динамику изменения толщины. Данная информация сравнивается статистической функцией с константными значениями порогов, выбирается среднее значение по каждому параметру и в конечном итоге формируется новая бинаризованная матрица, которая является компиляцией первой матрицы. В результирующей матрице определяется маска, повторяющая контуры интересующей области. Данная маска приводится к описывающему прямоугольнику, размеры которого передаются в качестве выходных данных вычисленных габаритных размеров измеряемого объекта.
Данные от автоматизированной системы определения габаритов объекта могут передаваться на внешнее устройство посредством интерфейса для подключения к персональному компьютеру или посредством интерфейса для подключения к локальной компьютерной сети.
Автоматизированная система определения габаритов объекта может дополнительно оснащаться сканером считывания штрихкодов для сканирования штрихкода объекта.
Также система может оснащаться весовой платформой для измерения веса объекта.
Пример достижения технического результата
Для проверки достижения технического результата была проведена серия экспериментов, которые заключались в следующем:
1) измерение размеров объектов с помощью штангенциркуля;
2) измерение размеров объектов с помощью автоматизированной системы с использованием обычной камеры;
3) измерение размеров объектов с помощью настоящей автоматизированной системы с использованием камеры глубины;
4) измерение размеров объектов с помощью настоящей автоматизированной системы с использованием камеры глубины и инфракрасной камеры.
Результаты экспериментов приведены в таблице 1.
Теперь в качестве действительных значений возьмем значения, полученные в ходе измерений 1), и посчитаем относительные погрешности измерений 2), 3) и 4).
Для удобства сведем эти данные в таблицу 2.
Как видно из результатов экспериментов, измерение габаритных размеров объектов посредством камеры глубины обеспечивает точность измерений, превышающую точность измерений посредством обычной камеры, а дополнительное использование инфракрасной камеры, обеспечивает еще большее увеличение точности измерений.
Камера глубины и инфракрасная камера могут быть выполнены на базе камеры Intel Realsense D415.
Модули обработки и анализа данных могут быть выполнены на базе микрокомпьютеров Khadas VIM3 PRO.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ для измерения габаритных размеров объекта | 2022 |
|
RU2808941C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ АУДИОВИЗУАЛЬНОГО РАСПОЗНАВАНИЯ СРЕДСТВ ИНДИВИДУАЛЬНОЙ ЗАЩИТЫ НА ЛИЦЕ ЧЕЛОВЕКА | 2022 |
|
RU2791415C1 |
| Способ автоматической классификации рентгеновских изображений с использованием масок прозрачности | 2019 |
|
RU2716914C1 |
| ВИЗУАЛИЗАЦИЯ ГАММА-ИЗЛУЧЕНИЯ | 2015 |
|
RU2706736C2 |
| СЕГМЕНТАЦИЯ И ПРОГНОЗИРОВАНИЕ ВРЕМЕННЫХ ПАТТЕРНОВ ШЛЕЙФОВ НИЗКОГО УРОВНЯ | 2020 |
|
RU2783420C1 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ВИРТУАЛИЗАЦИИ ЗЕРКАЛА | 2014 |
|
RU2668408C2 |
| Способ измерения дальности до вагона на прямолинейном участке железнодорожного пути | 2021 |
|
RU2769453C1 |
| Способ подавления встречной засветки при формировании изображений дорожного окружения перед транспортным средством и устройство для осуществления способа | 2020 |
|
RU2746614C1 |
Изобретение относится к измерительной технике, в частности к области оптического измерения линейных размеров объекта. Заявленная автоматизированная система определения габаритов объекта, содержащая камеру глубины, которая выполнена с возможностью передачи информации модулю обработки данных от камеры глубины, а модуль обработки данных от камеры глубины выполнен с возможностью передачи данных модулю анализа масок измеряемых областей в бинаризованных матрицах. При этом в модуле анализа масок измеряемых областей после получения бинаризованных матриц выполняется обход граничных точек периметра измеряемой области, полученные данные сравниваются при помощи статистической функции с постоянными значениями порогов, затем выбирается среднее значение по каждому параметру и формируется результирующая бинаризованная матрица, определяющая маску, повторяющую контуры интересующей области, по которой определяют габаритные размеры измеряемого объекта. Дополнительно автоматизированная система содержит инфракрасную камеру. Технический результат - повышение точности измерения линейных размеров объектов. 7 з.п. ф-лы, 1 ил., 2 табл.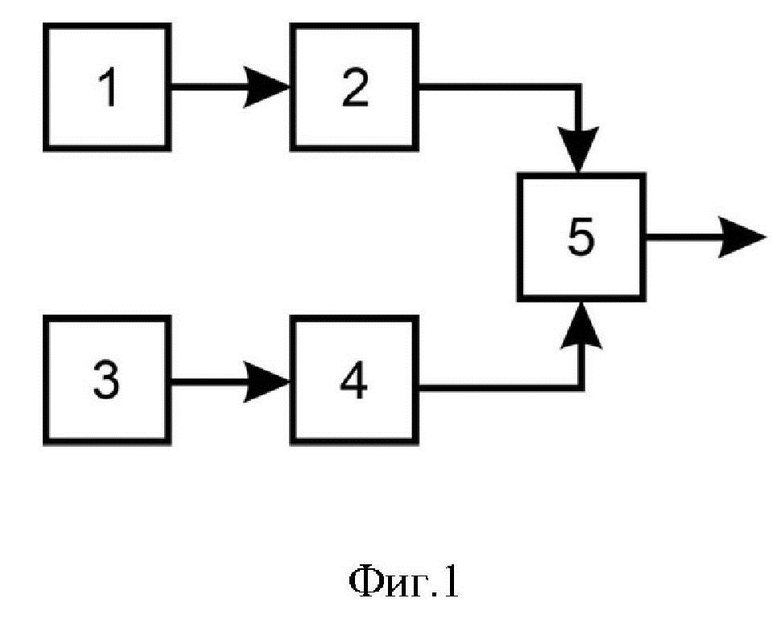
1. Автоматизированная система определения габаритов объекта, содержащая камеру, отличающаяся тем, что камера является камерой глубины, которая выполнена с возможностью передачи информации модулю обработки данных от камеры глубины, а модуль обработки данных от камеры глубины выполнен с возможностью передачи данных модулю анализа масок измеряемых областей в бинаризованных матрицах, при этом в модуле анализа масок измеряемых областей, после получения бинаризованных матриц выполняется обход граничных точек периметра измеряемой области, полученные данные сравниваются при помощи статистической функции с постоянными значениями порогов, затем выбирается среднее значение по каждому параметру и формируется результирующая бинаризованная матрица, определяющая маску, повторяющую контуры интересующей области, по которой определяют габаритные размеры измеряемого объекта.
2. Система по п.1, отличающаяся тем, что дополнительно содержит инфракрасную камеру.
3. Система по п.2, отличающаяся тем, что дополнительно содержит модуль обработки данных, выполненный с возможностью получения данных от инфракрасной камеры.
4. Система по п.3, отличающаяся тем, что модуль обработки данных от инфракрасной камеры глубины выполнен с возможностью передачи данных модулю анализа масок измеряемых областей в бинаризованных матрицах.
5. Система по п.1, отличающаяся тем, что дополнительно содержит интерфейс для подключения к персональному компьютеру.
6. Система по п.1, отличающаяся тем, что дополнительно содержит интерфейс для подключения к локальной компьютерной сети.
7. Система по п.1, отличающаяся тем, что дополнительно содержит сканер считывания штрихкодов.
8. Система по п.1, отличающаяся тем, что дополнительно содержит весовую платформу для измерения веса объекта.
| CN 217637612 U, 21.10.2022 | |||
| CN 109472822 A, 15.03.2019 | |||
| УСТРОЙСТВО, СПОСОБ И АППАРАТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРОВ ПРЕДМЕТА | 2016 |
|
RU2667671C1 |
| CN 110108231 B, 27.10.2020 | |||
| CN 106023201 B, 28.12.2018 | |||
| CN 106839975 B, 30.08.2019 | |||
| WO 2018003730 A1, 04.01.2018. | |||

