Группа изобретений относится к измерительной технике, в частности, к области оптического измерения линейных размеров объекта.
Из уровня техники известно устройство для измерения габаритных характеристик объекта, раскрытое в документе RU 214940 U1, опубликованном 22.11.2022. Данное устройство содержит корпус с платформой, опоры и угловой ограничитель, установленный в углу корпуса и предназначенный для предотвращения касания объекта и корпуса между собой, внутри корпуса размещен терминал для передачи данных с платформы головному устройству с сенсорным LCD экраном и блоком питания, на корпусе установлено, по меньшей мере, три ультразвуковых датчика и по меньшей мере три лазерных датчика для измерения габаритных характеристик объекта в трех измерениях по осям X, Y, Z, при этом стенки корпуса снабжены, по меньшей мере, тремя магнитными уголками для обозначения и фиксации крайних точек измеряемого объекта неправильной формы.
Недостатком данного устройства является наличие ультразвуковых датчиков, показания которых зависят от вещества, из которого выполнен измеряемый объект.
Также из уровня техники известно устройство для измерения габаритных размеров объекта, раскрытое в документе US 10775165 B2, опубликованном 15.09.2020. Данное устройство содержит проектор узора, сконфигурированный для проецирования узора на объект в окружающей среде; дальномерную камеру, сконфигурированную для захвата изображения узора на объекте и сбора трехмерных (3D) данных, соответствующих объекту; память, сконфигурированную для хранения библиотеки моделей ошибок; и процессор, выполненный с возможностью: выбирать конкретное измерение оцениваемого объекта. При этом получают значения для одной или нескольких переменных-предикторов, причем переменные-предикторы описывают аспекты измерения системы измерения конкретного измерения. Создают, используя трехмерные данные, собранные камерой дальности, промежуточную оценку конкретного измерения. Извлекают из библиотеки моделей ошибок, хранящейся в памяти, модель ошибки, соответствующую конкретному измерению. Вычисляют, используя модель ошибок и значения для одной или нескольких переменных-предикторов, оценку ошибки для конкретного измерения. Вычитают оценку ошибки из промежуточной оценки, чтобы получить окончательную оценку конкретного измерения.
Недостатками данного решения являются наличие проектора, а также необходимость создания для каждого объекта своего узора для коррекции ошибок.
Также из уровня техники известно устройство для измерения габаритных размеров объектов, раскрытое в документе CN 211527339 U, опубликованном 18.09.2020. Данное решение содержит платформу автоматизированного трехмерного сканирования, на которой размещены поворотный стол, механическая рука и компьютер. Поворотный стол и механическая рука электрически соединены с компьютером. Сканер жестко соединен с механической рукой и размещен напротив поворотного стола. Сканер включает в себя корпус и поддон, причем поддон закреплен на корпусе, а в корпусе закреплена перегородка. Платформа автоматизированного трехмерного сканирования содержит также фиксирующую пластину подсветки, которая неподвижно соединена с корпусом.
Недостатком данного решения является значительная погрешность измерения, вызванная тенью от подсветки, либо от других источников освещения.
Решение, раскрытое в CN 211527339 U, выбрано в качестве прототипа заявленной группы изобретений.
Задачей настоящей группы изобретений является устранение недостатков прототипа.
Технический результат заключается в повышении точности измерения линейных размеров объекта.
Технический результат достигается за счет того, что в момент съемки изображения объекта камерой глубины на объект воздействуют подсветкой, расположенной под зоной измерения. Данная подсветка, освещающая объект снизу и по сторонам, позволяет устранить на получаемых изображениях воздействия внешних световых факторов и исключить появление теней.
Таким образом, способ измерения габаритных размеров объекта, характеризуется тем, что осуществляют съемку объекта посредством камеры глубины с последующей обработкой изображения, при этом объект освещают подсветкой, расположенной под зоной измерения.
Устройство для измерения габаритных размеров объекта содержит основание для размещения объекта, подсветку и камеру глубины, при этом подсветка размещена в основании, а камера размещена над основанием.
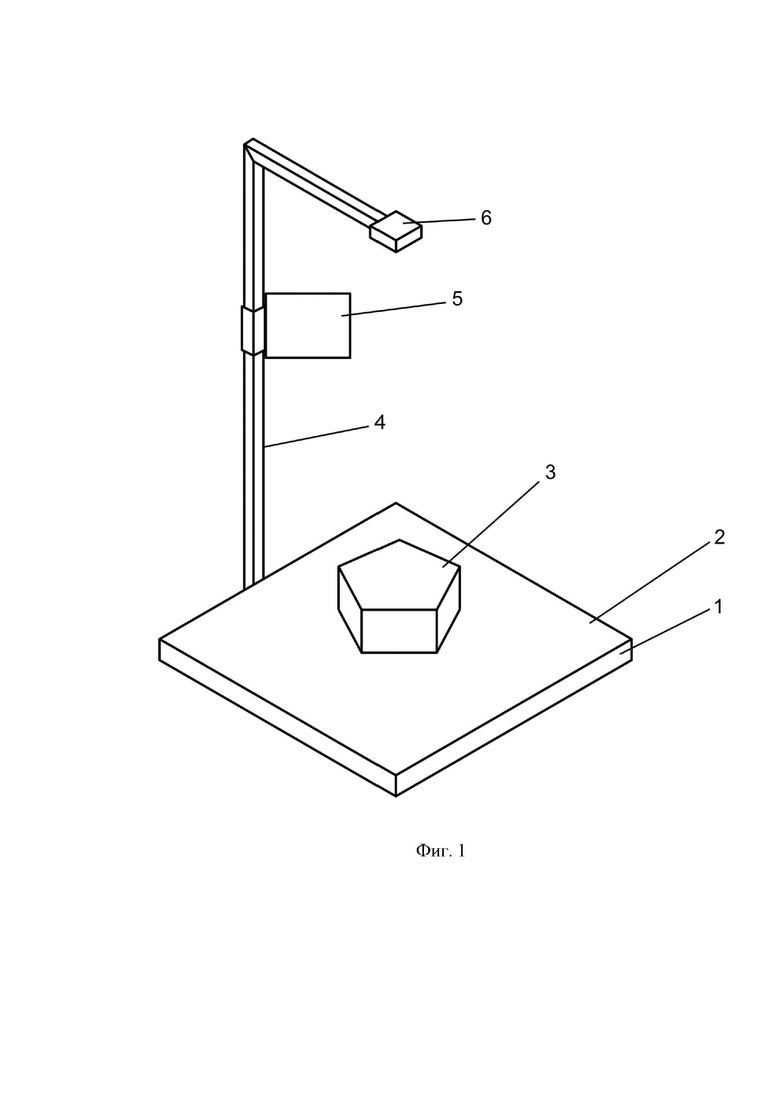
На фиг. 1 изображено устройство для измерения габаритных размеров объекта.
На фигуре обозначено: 1 - основание, 2 - подсветка, 3 - объект, 4 - опора, 5 - крепление для блока электроники и/или дисплея, 6 - камера глубины.
Размещение объекта 3 на основании 1, имеющим подсветку 2, позволяет получить равномерную засветку объекта 3 со всех сторон, исключая тем самым влияние внешних источников освещения и нейтрализуя появление теней. Подсветка 2 может быть выполнена белой из светодиодов, которые размещаются по всей площади основания 1. Таким образом, все основание становится источником белого равномерного света. Подсветка 2 сверху может быть накрыта закаленным стеклом.
Подсветка подключается к устройству ШИМ (широтно-импульсной модуляции) для регулировки ее яркости. Само устройство ШИМ подключается к блоку электроники посредством USB или RS-232 подключения.
К основанию 1 крепится опора 4, которая выполнена Г-образной. Сверху опоры 4 над основанием 1 крепится камера 6. Образованное при этом пространство между основанием 1 и камерой 6 является зоной измерения.
Также на опоре 4 размещается крепление 5 для блока электроники и/или дисплея.
В ножки основания 1 может быть встроено весоизмерительное устройство, предназначенное для измерения веса объекта. Весоизмерительное устройство может быть выполнено на основе тензодатчиков, выходной сигнал которых пропорционален давлению, приложенному к ним.
Встроенное весоизмерительное устройство позволяет одновременно с габаритами объекта измерять также его вес (массу).
Данные с камеры могут быть обработаны различными способами.
В момент съемки изображения объекта 3 камера глубины 6 позволяет измерить расстояния до всех точек измеряемого объекта с определенным разрешением. Совокупность расстояний формирует «облако» точек. Данное «облако» точек проходит этап аппроксимации и конвертируется в 3D модель. Готовая 3D модель измеряется в программе для работы с 3D моделями. Дополнительный ИК датчик позволяет улучшить информацию о расстояниях до точек объекта.
Также изображение с камеры глубины может передаваться на устройство обработки данных (микрокомпьютер), в котором оно проходит процедуру фильтрации несколькими фильтрами:
- фильтр интересующего диапазона высот;
- фильтр преобразования в градации серого;
- фильтр размытия по Гауссу;
- фильтр порога;
- фильтр бинаризации данных.
Фильтрация позволяет однозначно определить в каких точках кадра находятся границы объекта. После чего бинаризованная матрица кадра передается в модуль принятия решений, выполненный на базе нейронной сети сверточного типа.
При этом процесс измерения может осуществляться в несколько этапов фотографирования объекта с разной яркостью подсветки.
Пример достижения технического результата
Для проверки достижения технического результата была проведена серия экспериментов, которые заключались в следующем:
1) измерение размеров объектов с помощью штангенциркуля;
2) измерение размеров объектов с помощью заявленного устройства;
3) измерение размеров объектов с помощью устройства, подсветка которого размещена рядом с камерой.
При этом эксперименты 2) и 3) проводились днем в помещении с не зашторенным окном, а также с верхним освещением.
Результаты экспериментов приведены в таблице 1.
Теперь в качестве действительных значений возьмем значения, полученные в ходе измерений 1), и посчитаем относительные погрешности измерений 2) и 3), выраженные в абсолютных значениях.
Для удобства сведем эти данные в таблицу 2.
Как видно из результатов экспериментов, измерение габаритных размеров объектов с помощью подсветки, расположенной снизу объекта, обеспечивает точность измерений значительно превышающую точность известных способов измерений.
Пример осуществления изобретения
Устройство состоит из металлического корпуса, в котором расположен взвешивающий модуль с тензодатчиком МАССА-К TB-M150.2 и модуль светодиодной динамической подсветки 3D Scan Backlight 900 с закаленным стеклом, который кладется на рамку и прижимается через резиновый уплотнитель внешними креплениями по периметру стекла, опоры с многофункциональной камерой глубины Intel Realsense D415 и кронштейна с блоком электроники.
Блок электроники состоит из сенсорного дисплея Waveshare 7inch HDMI LCD (C), микрокомпьютера Khadas VIM 3 PRO, весового адаптера USB/МК,ТВ - Масса-К, USB-разветвителя D-Link DUB-H4, блока питания 12V 8A, блока питания 5V 5A набора интерфейсных кабелей, корпусных разъемов для подключение внешних устройств - RJ45, USB, AC, DB9, GX16-4.
Модуль светодиодной динамической подсветки 3D Scan Backlight 900 со светодиодами белого цвета свечения, светодиодными лентами зеленого и красного цвета свечения по периметру модуля. Зеленая подсветка информирует об успешно выполненном измерении и готовности устройства к следующему измерению. Красная подсветка информирует об ошибке в момент выполнения измерения.
Электропитание от сети переменного тока 220-240 В.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система определения габаритов объекта | 2022 |
|
RU2806064C1 |
| Способ бесконтактного измерения геометрических параметров и породно-качественного состава штабеля круглых лесоматериалов, погруженных на автотранспорт и/или прицеп, и автоматизированная система для осуществления способа | 2021 |
|
RU2778975C1 |
| Фотограмметрический способ определения объема насыпи в закрытых складах | 2021 |
|
RU2788855C2 |
| СПОСОБ ОЦЕНКИ ЭКСТЕРЬЕРА ЖИВОТНЫХ ПРИ БОНИТИРОВКЕ | 2024 |
|
RU2826315C1 |
| СПОСОБ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ФУТЕРОВКИ ТЕПЛОВЫХ АГРЕГАТОВ | 2022 |
|
RU2795734C1 |
| Способ измерения геометрии сотовых ячеек | 2021 |
|
RU2770309C1 |
| Способ распознавания местности | 2023 |
|
RU2836607C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ ВИРТУАЛЬНЫХ ТУРОВ В МНОГОПОЛЬЗОВАТЕЛЬСКОМ РЕЖИМЕ | 2022 |
|
RU2783218C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| Способ реконструкции 3D модели статичного объекта и устройство для его реализации | 2018 |
|
RU2693327C1 |
Устройство содержит основание для размещения объекта, подсветку, камеру глубины, размещенную над основанием, и устройство обработки данных. Подсветка размещена в основании, являющемся источником белого равномерного света. В способе объект освещают подсветкой, расположенной под зоной измерения, производят фильтрацию изображения с камеры глубины, формируют облако точек, аппроксимируют и конвертируют его в 3D-модель в устройстве обработки данных. Фильтрацию, формирование, аппроксимацию и конвертацию облака точек осуществляют в несколько этапов с разной степенью яркости подсветки. Из готовых кадров получают бинаризованные матрицы и передают их в модуль принятия решений. Технический результат - повышение точности измерения линейных размеров объектов. 2 н. и 20 з.п. ф-лы, 1 ил., 2 табл. 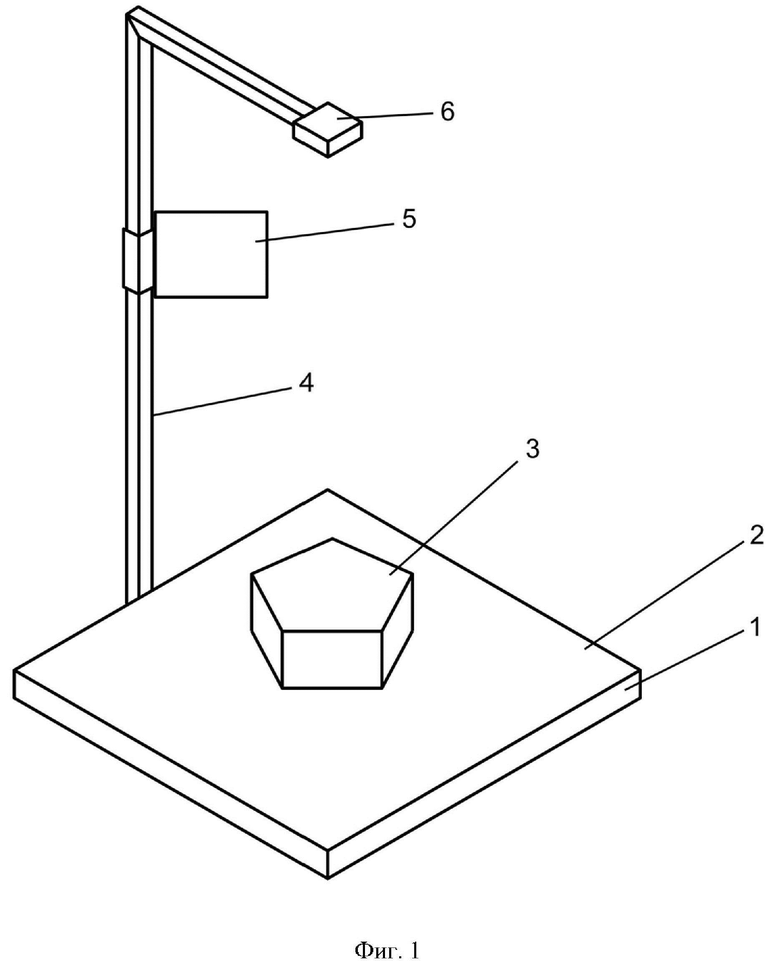
1. Устройство для измерения габаритных размеров объекта, выполненное с возможностью осуществления способа по п.10, содержащее основание для размещения объекта, подсветку и камеру глубины, отличающееся тем, что подсветка размещена в основании, являющемся источником белого равномерного света, а камера размещена над основанием, при этом устройство выполнено с возможностью передачи изображения с камеры глубины на устройство обработки данных.
2. Устройство по п.1, отличающееся тем, что подсветка выполнена светодиодной.
3. Устройство по п.1, отличающееся тем, что подсветка размещена по всей площади основания.
4. Устройство по п.1, отличающееся тем, что камера глубины зафиксирована на опоре.
5. Устройство по п.1, отличающееся тем, что подсветка накрыта закаленным стеклом.
6. Устройство по п.1, отличающееся тем, что подсветка подключена к устройству ШИМ для регулировки яркости.
7. Устройство по п.1, отличающееся тем, что на опоре размещено крепление для блока электроники и/или дисплея.
8. Устройство по п.1, отличающееся тем, что в основание встроено устройство для измерения веса объекта.
9. Устройство по п.8, отличающееся тем, что устройством для измерения веса является тензодатчик.
10. Способ измерения габаритных размеров объекта, характеризующийся тем, что осуществляют съемку объекта посредством камеры глубины с последующей обработкой изображения в устройстве обработки данных, отличающийся тем, что объект освещают подсветкой, расположенной под зоной измерения, производят фильтрацию изображения с камеры глубины, формируют облако точек, аппроксимируют облако точек, конвертируют облако точек в 3D-модель в устройстве обработки данных, при этом фильтрацию, формирование, аппроксимацию и конвертацию облака точек осуществляют в несколько этапов фотографирования объекта с разной степенью яркости подсветки, после чего из готовых кадров получают бинаризованные матрицы, каждая из которых получена на каждом из предыдущих этапов, и передают их в модуль принятия решений.
11. Способ по п.10, отличающийся тем, что в основание встроено устройство для измерения веса объекта.
12. Способ по п.11, отличающийся тем, что устройством для измерения веса является тензодатчик.
13. Способ по п.10, отличающийся тем, что объект размещают на основании.
14. Способ по п.10, отличающийся тем, что подсветка размещена в основании.
15. Способ по п.10, отличающийся тем, что подсветка размещена по всей площади основания.
16. Способ по п.10, отличающийся тем, что подсветка выполнена светодиодной.
17. Способ по п.16, отличающийся тем, что камера зафиксирована на опоре.
18. Способ по п.10, отличающийся тем, что камера размещена над основанием.
19. Способ по п.10, отличающийся тем, что подсветка накрыта закаленным стеклом.
20. Способ по п.10, отличающийся тем, что подсветка подключена к устройству ШИМ для регулировки яркости.
21. Способ по п.10, отличающийся тем, что на опоре размещено крепление для блока электроники и/или дисплея.
22. Способ по п.10, отличающийся тем, что используется дополнительный ИК датчик, позволяющий улучшить информацию о расстояниях до точек объекта.
| Способ измерения геометрии сотовых ячеек | 2021 |
|
RU2770309C1 |
| CN 110148166 A, 20.08.2019 | |||
| CN 103162630 A, 19.06.2013 | |||
| Способ определения количества влаги в карамельной массе | 1955 |
|
SU103714A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА | 2014 |
|
RU2567735C1 |
| УСТРОЙСТВО, СПОСОБ И АППАРАТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРОВ ПРЕДМЕТА | 2016 |
|
RU2667671C1 |
| US 2004151068 A1, 05.08.2004. | |||

