Изобретение относится к способам обнаружения надводных и подводных объектов и может быть использовано для защиты подводных акваторий от вторжения неопознанных объектов в морях и океанах.
Предлагаемый способ может использоваться для скрытного обнаружения надводных и воздушных целей, особенно низколетящих, недоступных для традиционных радиолокационных способов обнаружения.
Известны гидроакустические способы подводного обнаружения неопознанных объектов [1] пассивные и активные.
Однако пассивные способы обнаружения не пригодны в случае слабошумящих целей, а активные способы не обладают необходимой скрытностью системы обнаружения.
В качестве прототипа принят многовековой способ обнаружения и идентификации подводной цели с помощью вооруженного человеческого глаза [2], который можно охарактеризовать следующей совокупностью существенных признаков.
Способ обнаружения и идентификации подводной цели в охраняемой акватории, заключающийся в детектировании космического излучения (оптического диапазона его спектра), провзаимодействующего с целью детекторами (глазами).
Недостатком известного способа [2] является ограниченность его применения как по глубине, так и по площади охраняемой акватории. Это связано со значительным поглощением света морской водой.
Техническим эффектом, получаемым от внедрения изобретения, является расширение области применения известного способа как по глубине, так и по охраняемой площади морской акватории.
Поставленный технический результат достигают за счет того, что в известном способе обнаружения и идентификации подводной цели в охраняемой акватории, заключающемся в детектировании космического излучения, провзаимодействующего с целью детекторами, в качестве космического излучения используют его жесткую компоненту, а детектирование космического излучения детекторами проводят под целью и ниже уровня моря.
При этом детекторы космического излучения располагают ниже уровня моря под целью в виде мозаики с известным пространственным шагом. При этом размер мозаики должен не менее чем в (3-5) раз превышать предполагаемые размеры цели.
Кроме того, на берегу над уровнем моря располагают дополнительный опорный детектор или несколько детекторов.
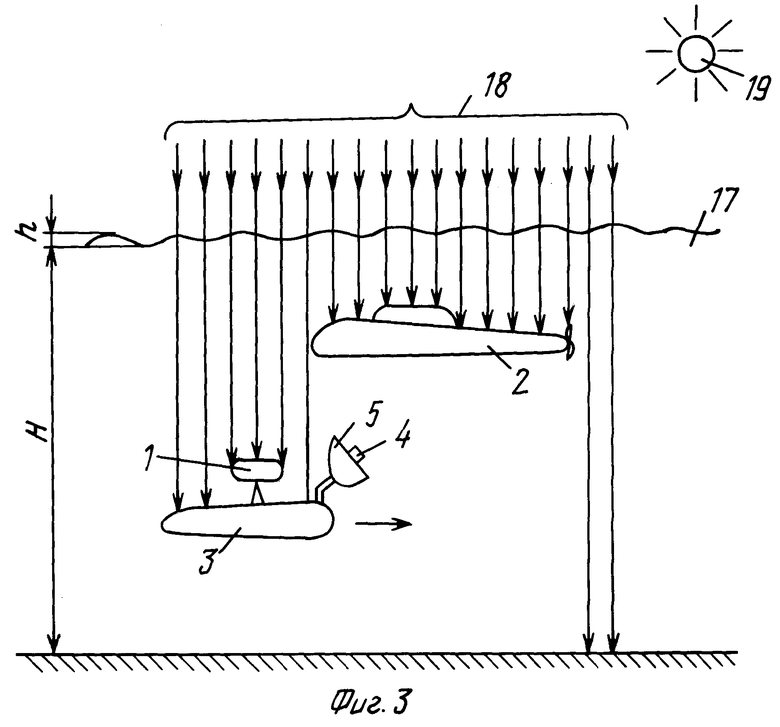
Детекторы космического излучения в виде мозаики располагают на глубине H, удовлетворяющей соотношению
h/H < 0,01, (1)
где h - максимальная высота поверхностных волн в охраняемой акватории.
Детекторы космического излучения и всю систему обнаружения можно располагать на передвижном автономном плавсредстве или на нескольких передвижных плавсредствах.
Для идентификации обнаруженной подводной цели проводят облучение его ходовой части узким оптическим или акустическим лучом, затем детектируют рассеянное вращающимся ходовым винтом цели излучение, по которому проводят ее последующую обработку для идентификации.
Предлагаемый способ основан на том, что поток космического излучения в виде атомных ядер высокой энергии, в основном протонов, падающих на Землю из мирового пространства, и образуемое ими в земной атмосфере вторичное излучение, в котором встречаются все известные в настоящее время элементарные частицы, превосходят по своей проникающей способности все другие виды излучений.
Поток заряженных частиц на уровне моря составляет в среднем 1,75•10-2 частиц /см2•с и весьма слабо меняется с солнечной активностью. Общая энергия, приносимая космическими лучами на 3емлю (~1,5 • 106 кВт), ничтожно мала в сравнении с энергией, получаемой Землей от Солнца, и сравнима с энергией видимого света звезд.
Наибольшей проникающей способностью в космических лучах обладает жесткая их компонента, состоящая в основном из релятивистских μ - мезонов. В последнее время они получили названия мюонов [3]. Ее образование происходит преимущественно в верхних и средних слоях атмосферы за счет распада вторичных заряженных π - мезонов, умеренной энергии, пробег которых до распада сравним с их ядерным пробегом [3].
На долю жесткой компоненты приходится около 70% полной интенсивности Космических лучей, а именно очень быстрые μ - мезоны с энергией выше 1011 эВ, способные проникать на большие глубины, ответственны за громадную проникающую способность Космических лучей [3] (фиг. 1). Изменение интенсивности Космических лучей с глубиной связано с быстрым падением энергетического спектра и поглощением энергии μ -мезонов.
Предлагаемый способ обнаружения основан на том, что коэффициенты поглощения мюонов материалом цели и водой различаются.
Интенсивность Космического излучения испытывает с течением времени слабые периодические и непериодические изменения (вариации). Многолетние наблюдения с помощью приборов непрерывной регистрации большой сетью станций позволили установить, что основные вариации интенсивности Космических лучей обусловлены изменениями интенсивности во времени так называемых солнечных хромосферных вспышек и магнитных бурь [3].
Таким образом, практическая реализация способа в настоящее время не вызывает сомнений.
Изобретение поясняется чертежом.
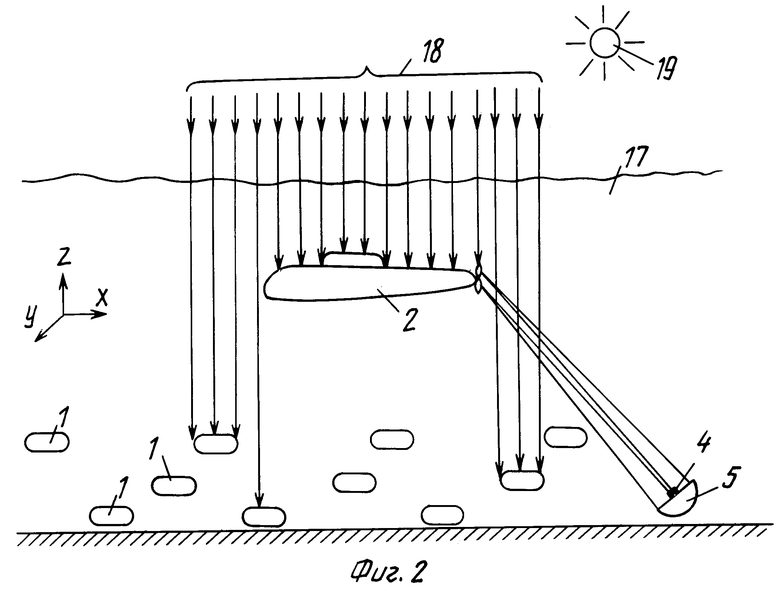
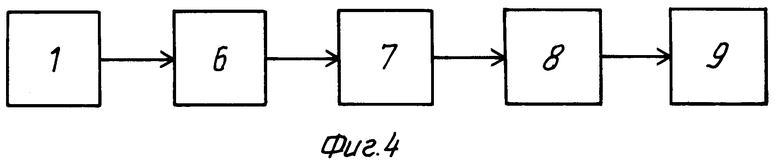
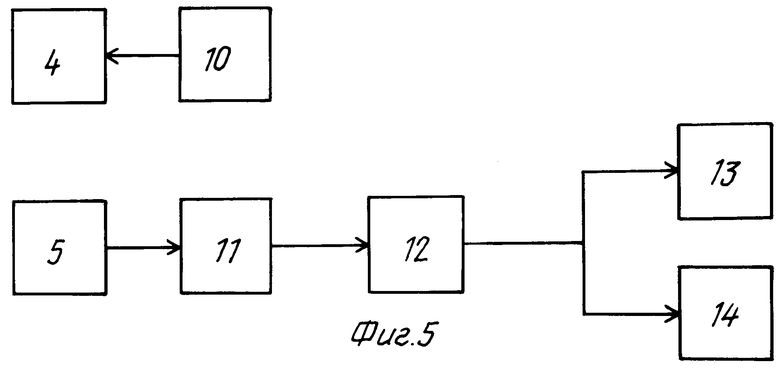
На фиг. 1 представлен график зависимости интенсивности жесткой компоненты космического излучения от глубины моря; на фиг. 2, 3 - различные варианты практической реализации способа; на фиг. 4,5,6- варианты исполнения обрабатывающей аппаратуры для реализации способа.
Схема для реализации способа обнаружения и идентификации подводной цели в охраняемой акватории включает в себя детекторы 1 Космического излучения, расположенные под целью 2 в виде мозаики с пространственным шагом, в (3-5) раз превышающим предполагаемые размеры цели 2 (фиг.2). На берегу на уровне моря располагают аналогичные детекторы в виде аналогичной мозаики (на чертеже не показаны), и их выходные сигналы являются опорными.
Детекторы 1 располагают под целью 2 на глубине H, удовлетворяющей соотношению (1), чтобы поверхностные волны не влияли на их показания.
В другом варианте реализации способа детекторы 1 Космического излучения и всю систему обработки их сигналов располагают на автономном передвижном плавсредстве 3 (фиг. 3).
В третьем варианте реализации способа схема обнаружения и идентификации включает в себя оптический или акустический остронаправленные излучатель 4 и приемник 5 рассеянного от ходовой части цели излучения (фиг.2).
В режиме обнаружения цели 2 обрабатывающая аппаратура (фиг.4) может включать в себя помимо детектора 1 последовательно соединенные блоки 6 предварительной обработки сигналов с детекторов, тракт 7 передачи сигналов, блок 8 окончательной обработки сигналов и индикатор 9, например вольтметр или электронно-лучевая трубка.
В режиме работы при идентификации цели обрабатывающая аппаратура для реализации способа (фиг. 5) дополнительно включает в себя помимо остронаправленных излучателей 4 и приемника 5 акустических или оптических волн систему 10 сканирования и тракт 11 передачи эхо-сигнала от цели 2, а также демодулятор 12, устройство прослушивания 13 и спектроанализатор 14.
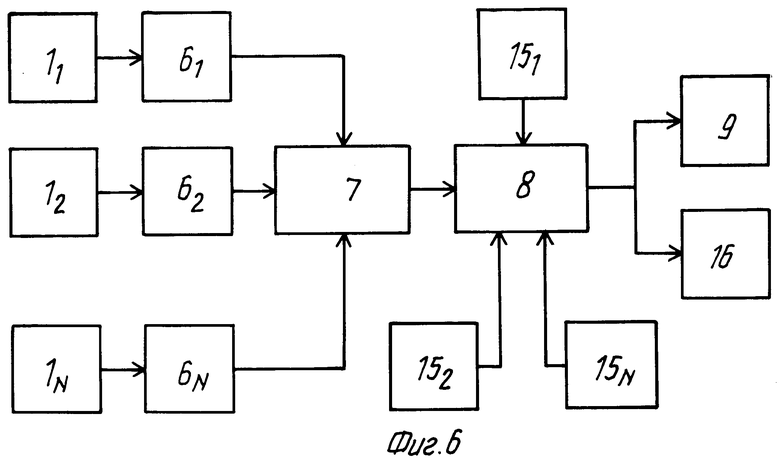
При использовании опорных детекторов 15 (фиг. 6) аппаратура в режиме обнаружения цели включает детекторы 11, 12...1N космического излучения, расположенные в виде мозаики под водой, соединенные выходами с блоками 61, 62.. . 6N предварительной обработки сигналов. Сигналы с этих блоков по тракту 7 передачи сигналов направляются на блок 8 окончательной обработки сигналов. Туда же направляются сигналы с аналогичных опорных детекторов 151, 15R... 15N, расположенных на уровне моря.
Выходной сигнал с блока 8 окончательной обработки сигналов направляется на индикатор 9 и регистратор 16.
В качестве детекторов 1 космического излучения можно использовать любые современные разработки глубоководных (или иных) детекторов мюонов с электрическим выходом сигнала. Характеристика направленности детекторов направления - телескопы направляется вертикально вверх [4]. Детекторы частиц космического излучения - мюонов, пришедших через объект - нарушитель, устанавливаемые в разных средах - под водой и на берегу, одинаковы и различаются по конструкции защитных корпусов, а также размерами - площадями их чувствительных к падающим частицам поверхностей телескопов. При этом чем глубже детекторы устанавливаются под водой, тем больше их площадь и прочнее корпусы, поскольку чем глубже море, тем меньше количество принимающих в водную среду частиц, приходящихся на единицу поверхности, и тем больше гидростатическое давление. Чем выше ожидаемая скорость перемещения (например, в случае обнаружения воздушной цели), тем больше должны быть размеры мозаики детекторов и каждого детектора в отдельности. Остальные блоки и системы для реализации способа особенностей не имеют и широко применяются в гидроакустике.
Способ обнаружения и идентификации подводной цели в охраняемой акватории реализуется следующим образом.
При появлении подводной цели 2 в охраняемой акватории 17 (фиг. 2, 3) детекторы 1 обнаружат уменьшение интенсивности жесткой компоненты космического излучения 18 из-за экранировки части детекторов 1 целью 2.
На соответствующие блоки 6 предварительной обработки сигналов поступают сигналы, которые через тракт 7 передачи направляют на блок 8 окончательной обработки сигналов, а затем на индикатор 9, включающий сигнал тревоги.
Если в качестве детекторов 1 космического излучения используется мозаика детекторов с известным пространственным шагом, то координаты цели 1 определяют по пространственному расположению затененных детекторов.
При этом любое случайное изменение интенсивности жесткой компоненты космического излучения 18, вызванное, например, магнитными бурями на солнце 19 (фиг. 2, 3), отслеживается в блоке 8 окончательной обработки сигналов, куда направляют сигналы с надводной мозаики детекторов 15 космического излучения (фиг. 6).
При расположении детекторов 1 и системы обработки на одном или нескольких передвижных автономных плавсредствах 3 координаты цели определяют по известному месту расположения автономного плавсредства 3 (фиг. 3).
При этом глубина H погружения автономных плавсредств 3 или мозаики детекторов 1 должна удовлетворять уравнению (1), чтобы поверхностные волны охраняемой акватории 17 практически не влияли на работу систем обнаружения цели 2.
Обнаружение цели данным способом происходит скрытно, поскольку для этого используется естественное космическое излучение. Однако для идентификации цели уже включается соответствующий остронаправленный излучатель 4, направляющий с помощью сканатора 10 (фиг. 5) на ходовую часть цели 2 оптический или акустический луч. Рассеянное от ходовой части (лопастями ходового винта) цели 2 излучение принимается приемником 4 и через тракт 11 передачи эхо-сигнала направляется в демодулятор 12, с которого сигнал опознавания направляется на устройство 13 прослушивания и спектроанализатор 14.
В связи с этим режим идентификации цели используется лишь в крайнем случае, чтобы не нарушать скрытность системы.
Таким образом, применение данного способа значительно расширяет область применения известного визуального способа обнаружения цели, делает его объективным, сохраняя скрытность обнаружения цели, в том числе и в глубинах охраняемой акватории.
Источники информации
1. Урик P. Дж. Основы гидроакустики Л.1978 гл. 12, 393 - 418 с.
2. Соул Г. "Подводные границы" Гидрометеоиздат. Л., 1973, стр. 13 - прототип.
3. Физический энциклопедический словарь. М., "Сов. инц.", т.2, 1962, с. 482 - 488.
4. Панфилов А.И. Глубоководный детектор мюонов и нейтрино на озере Байкал. "Многоцелевые несущие системы и кабельные коммуникации" Труды IV Междунар. Научн. - техн. Конф. Труды "Современные методы и средства океанологических исследований", М., 1998, стр. 103.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА СО СТАЦИОНАРНЫМ РАЗМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ В ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2168737C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178629C1 |
| ПОДВОДНОЕ РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2214656C2 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОГО ПЛАВСРЕДСТВА ОТ ОБНАРУЖЕНИЯ ГИДРОЛОКАТОРОМ | 2001 |
|
RU2195684C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
Изобретение относится к способам обнаружения надводных, подводных и воздушных целей и может быть использовано для защиты морских акваторий от вторжения. Способ может также использоваться для обнаружения воздушных целей. Сущность изобретения заключается в детектировании космического излучения, провзаимодействующего с целью, детекторами космического излучения. Новым в способе является то, что в качестве космического излучения используют его жесткую компоненту, а детектирование космического излучения детекторами проводят ниже уровня моря под целью. Детекторы космического излучения можно располагать в виде мозаики с известным пространственным шагом или располагать на автономном плавсредстве. Технический результат заключается в расширении области использования. 7 з.п. ф-лы, 6 ил.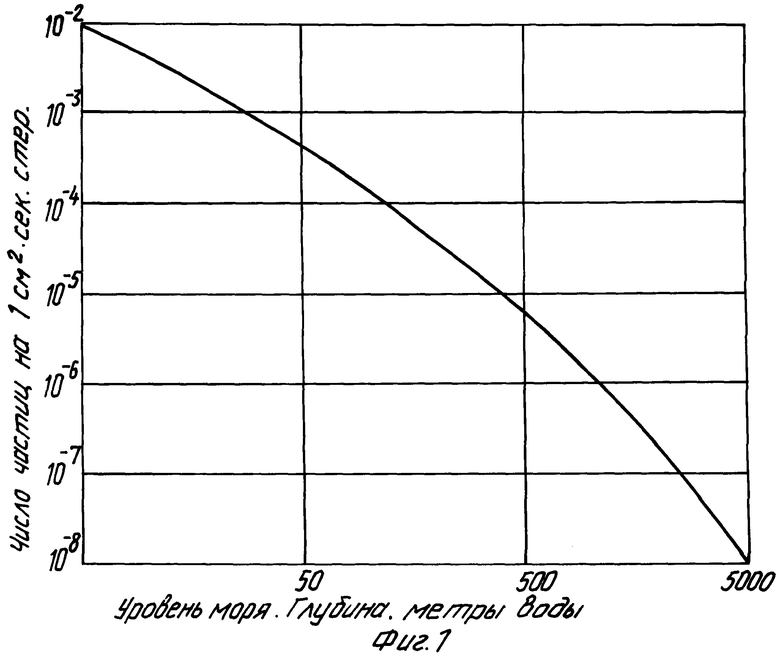
| СОУЛ Г | |||
| Подводные границы | |||
| - Л.: Гидрометеоиздат, 1973, с.13 | |||
| RU 1821773 A1 15.06.1993 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2008692C1 |
| US 5646907, A, 08.07.1997 | |||
| US 51611125 A, 03.11.1992 | |||
| WO 9411756 A1, 26.05.1994 | |||
| УРИК Р | |||
| ДЖ | |||
| Основы гидроакустики | |||
| - Л.: Судостроение, 1978, с.393-418. | |||

