Изобретение относится к области исследования поверхности земли щелевым гиперспектральным сенсором дистанционного зондирования, в частности к коррекции геометрических искажений изображений, формируемых в условиях угловых колебаний носителя сенсора.
Наиболее распространенным типом гиперспектральных систем на сегодняшний день являются сканирующие по пространству системы, построенные по технологии, обеспечивающей поперечный обзор узкой полосы зондируемой поверхности с разверткой вдоль трассы полета носителя за счет его поступательного движения (Шовенгердт Р.А. Дистанционное зондирование. Модели и методы обработки изображений. М.: Техносфера, 2013, 592 с.). В этом случае каждая регистрируемая строка изображения характеризуется своими элементами внешнего ориентирования. Такой способ весьма удобен при решении задач дистанционного зондирования, где сканирование организуется за счет движения аппарата на орбите. Однако при установке подобной аппаратуры неподвижно (гиростабилизация отсутствует), например, на беспилотный летательный аппарат, подвергающийся неизбежным возмущениям по углам крена, тангажа и рыскания, возникают геометрические искажения формируемых изображений, что может значительно снизить эффективность решения задач обнаружения, распознавания и классификации заданных объектов по их пространственно-спектральным признакам. При этом наиболее существенные искажения формируемых изображений вызывают угловые колебания по крену, приводящие к смещению контурных точек на формируемом изображении.
Решение этой проблемы за счет установки гиперспектральной аппаратуры на гиростабилизированную платформу позволяет частично скомпенсировать возникающие искажения. Однако существенными ограничениями такой стабилизации являются большой вес и энергопотребление, что неприемлемо для малогабаритных беспилотных летательных аппаратов.
Существуют альтернативные способы решения этой проблемы, которые в большинстве основаны на использовании дополнительного кадрового сенсора (видеокамеры), синхронизированного с гиперспектральной системой (см., например, Казанцев А.О. Эффективный алгоритм коррекции геометрических искажений в авиационных гиперспектральных изображениях // Исследование Земли из космоса. 2009. №5. 49-55; Журкин И.Г., Никишин Ю.А. Методика и технология геометрической коррекции нестабилизированных изображений бортового гиперспектрометра // Изв. ВУЗов. «Геодезия и аэрофотосъемка». 2010. №5. С. 86-92; Патент RU 2 411 449 опубл. 10.02.2011 г., МПК G01C 11/02).
В качестве прототипа выбран способ (Патент RU 2 411 449, опубл. 10.02.2011 г., МПК G01C 11/02), включающий в себя получение последовательности снимков кадрового сенсора и сканирующего сенсора, которое синхронизировано по времени, запись их на запоминающее устройство, сопоставление отдельных снимков кадрового сенсора в порядке их последовательности, определение сдвига и поворота каждого последующего снимка относительно предыдущего снимка методом цифровой обработки изображений снимков, на основании сопоставления координат центров отдельных снимков определяют линию траектории движения областей обзора сканирующего и кадрового сенсоров, на линию траектории накладывают снимки кадрового сенсора друг на друга с учетом их положения, получая изображение зондируемой поверхности в виде мозаик, на основе мозаики осуществляют построение математического преобразования для коррекции изображения методом триангуляции, полученное геометрическое преобразование используют для пересчета данных сканирующего сенсора, получая неискаженное изображение зондируемой поверхности.
Существенным недостатком способа-прототипа является необходимость дополнительной полезной нагрузки в виде кадрового сенсора, а также достаточно высокая вычислительная сложность алгоритмов совместной цифровой обработки гиперспектральных и видеоизображений, позволяющая проводить коррекцию изображений исключительно на наземных пунктах обработки.
Технический результат предлагаемого способа коррекции геометрических искажений гиперспектральных изображений заключается в отсутствии необходимости использования дополнительного кадрового сенсора, а также в простоте реализации, точности и быстродействии, позволяющих проводить коррекцию изображений на борту носителя.
Технический результат достигается тем, что согласно предлагаемому способу, включающему получение последовательности строк сканирующего сенсора и их запись на запоминающее устройство, отличающийся тем, что дополнительно получают значения угла крена синхронно с получением строк изображения, с использованием которых определяют количество пикселей смещения в строке, корректируют каждую строку, путем сдвига индексов пикселей в строке на определенное количество пикселей смещения влево или вправо, в зависимости от значения и направления угла крена.
Сущность изобретения заключается в том, что дополнительно получают значения угла крена синхронно с получением строк изображения, с использованием которых определяют количество пикселей смещения в строке, корректируют каждую строку, путем сдвига индексов пикселей в строке на определенное количество пикселей смещения влево или вправо, в зависимости от значения и направления угла крена.
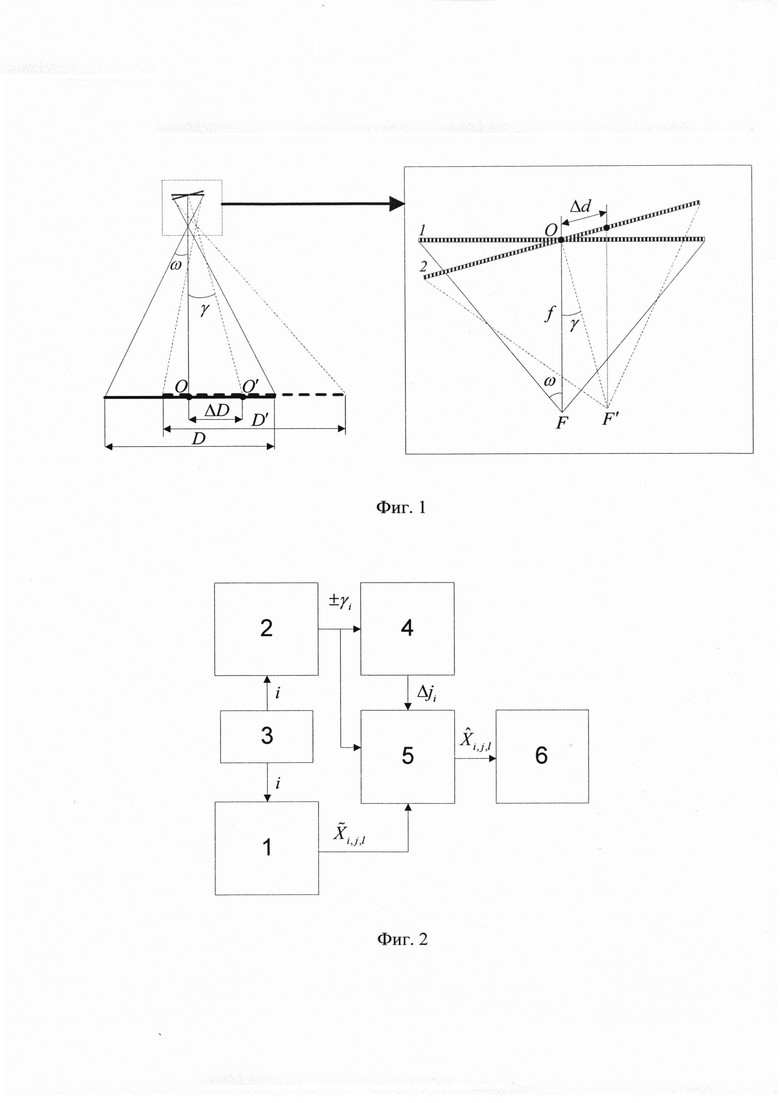
Для пояснения сущности изобретения на фиг. 1 показана обобщенная схема поперечного сканирования местности щелевым гиперспектрометром с фокусным расстоянием ƒ и углом поля зрения 2ω при угле крена γ, где D - область обзора при съемке в надир, D' - область обзора при съемке с креном, ΔD - расстояние на местности, характеризующее смещение центра О' изображения, формируемого при съемке, с углом крена относительно центра O при съемке в надир.
Из фиг. 1 видно, что фотоприемная матрица в положении 1 и 2 характеризуется общим центром О, поэтому расстояние ΔD будет определять смещение центра изображения при съемке в надир относительно съемки с углом крена γ. Следуя геометрическим соображениям, проекцию участка обзора ΔD на плоскость матрицы в положении 2 можно определить по следующему выражению:

Отсюда количество пикселей поперечного смещения формируемого изображения при угле крена γ будет определяться как

где а - поперечный размер пикселя.
Тогда искаженное изображение  при положительных отклонениях по крену (крен вправо) относительно его эталонного положения Xi,j,l (без крена) можно представить в следующем виде:
при положительных отклонениях по крену (крен вправо) относительно его эталонного положения Xi,j,l (без крена) можно представить в следующем виде:

где i=1,…,I, j=1,…,J; I,J - число строк и столбцов изображения соответственно; Xi,j,l ∈ [0,…,2N-1] - значения яркости i,j-того пикселя l-того спектрального изображения; l - индекс спектральной компоненты, l=1,…,L, N - степень квантования яркости изображения.
В случае отрицательных значений крена (крен влево) модель искажения примет вид

Предлагаемый способ коррекции искажений гиперспектрального изображения в условиях угловых колебаний носителя по крену, может быть реализован, например, по следующему алгоритму.
Шаг 1. Синхронное получение i-той строки изображения Xi,j,l и соответствующего i-того значения угла крена γi.
Шаг 2. Определение длины отрезка Δdi для i-той строки.
Шаг 3. Определение целого количества смещенных пикселей в строке Δji.
Шаг 4. По данным направления изменения угла крена (±γ) выполняется коррекция путем смещения i-той строки на Δji пикселей влево или вправо в соответствии с выражениями


Предлагаемый способ может быть реализован, например с помощью устройства, блок-схема которого представлена на фиг. 2. Блок-схема устройства содержит: 1 - сенсор формирования строк изображений; 2 - датчик угла крена; 3 - синхронизатор; 4 - блок определения смещения; 5 - блок коррекции строк; 6 - запоминающее устройство.
Устройство на фиг. 2 работает следующим образом. Сенсор 1 формирует строки спектральных изображений одновременно с получением значений угла крена от датчика угла крена 2 в соответствии с сигналами синхронизатора 3, после чего в блоке определения смещения 4, по значениям угла крена находят целое количество пикселей Δj, для смещения i-той строки и подают их совместно со значениями угла крена с блока 2 и i-той строкой с блока 1 в блок коррекции строк 5, где в соответствии с выражениями (5), (6) осуществляют смещение пикселей строк, далее смещенные строки спектральных изображений поступают в запоминающее устройство для сохранения.
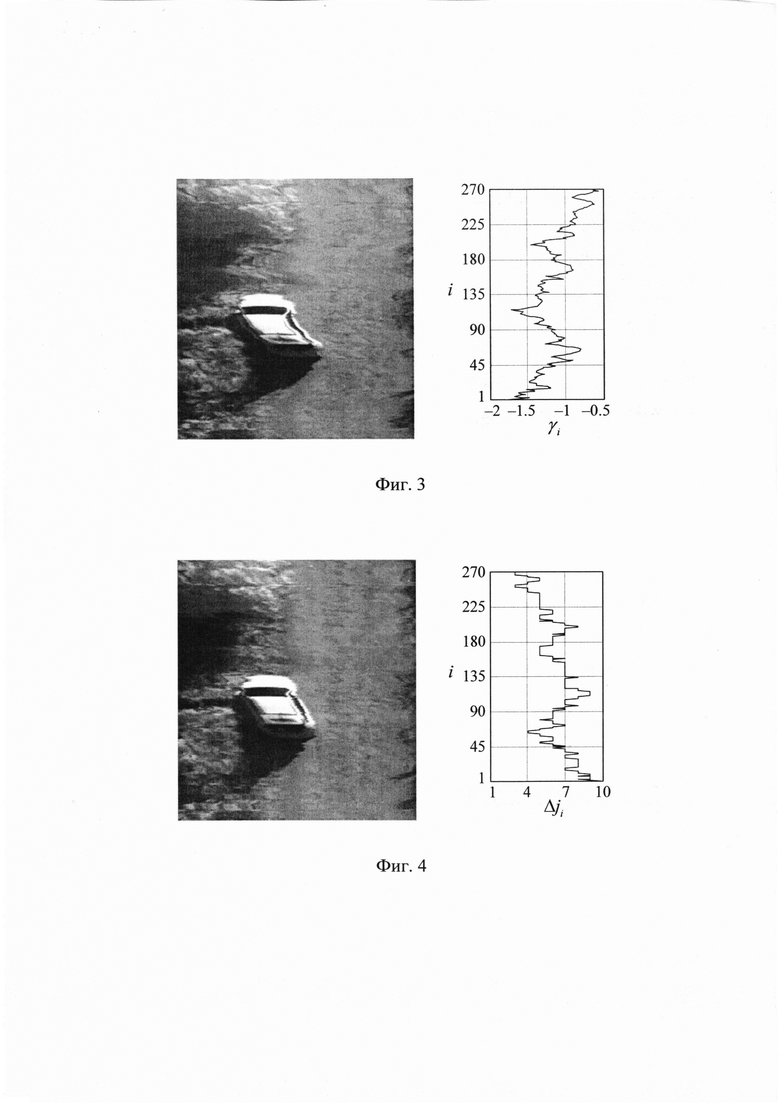
На фиг. 3 представлен фрагмент одного из спектральных каналов искаженного гиперспектрального изображения, сформированного гиперспектральной системой, установленной на беспилотном летательном аппарате, а также его угловые отклонения по крену. На фиг. 4 представлен скорректированный по предложенному способу фрагмент изображения, а также рассчитанное количество пикселей смещения в строке. Съемка выполнялась на высоте около 50 м с синхронной фиксацией угловых значений крена по данным штатной бортовой инерциальной навигационной системы в моменты формирования строк изображения.
Из фиг. 3, 4 видно, что предложенный способ показал достаточно высокую точность коррекции геометрических искажений гиперспектрального изображения, вызванных колебаниями беспилотного летательного аппарата по углу крена. Разработанный способ является вычислительно простым, не требует дополнительной бортовой аппаратуры и позволяет проводить достаточно точную коррекцию в реальном масштабе времени на борту носителя.
Таким образом, предлагаемый способ позволяет с высокой точностью и быстродействием проводить коррекцию изображений на борту носителя без использования дополнительного кадрового сенсора, за счет того, что получают значения угла крена синхронно с получением строк изображения, с использованием которых определяют количество пикселей смещения в строке, корректируют каждую строку, путем сдвига индексов пикселей в строке на определенное количество пикселей смещения влево или вправо в зависимости от значения и направления угла крена.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ коррекции геометрических искажений гиперспектральных изображений, заключающийся в получении последовательности строк сканирующего сенсора и их записи на запоминающее устройство, получении значения угла крена синхронно с получением строк изображения, с использованием которых определяют количество пикселей смещения в строке, корректируют каждую строку, путем сдвига индексов пикселей в строке на определенное количество пикселей смещения влево или вправо в зависимости от значения и направления угла крена.
Предлагаемое техническое решение является промышленно применимым, так как для его реализации могут быть использованы любые известные из уровня техники программируемые и непрограммируемые процессоры цифровой обработки сигналов и изображений (см., например, URL: http://module.ru/catalog/).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции геометрических искажений гиперспектральных изображений по информации о крене сканирующего сенсора | 2024 |
|
RU2834731C1 |
| Способ коррекции геометрических искажений гиперспектральных изображений по информации о крене сканирующего сенсора при размещении гиперспектральной аппаратуры на подвесе | 2024 |
|
RU2831756C1 |
| СПОСОБ УСТРАНЕНИЯ ГЕОМЕТРИЧЕСКИХ ИСКАЖЕНИЙ ИЗОБРАЖЕНИЙ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ, ПОЛУЧЕННЫХ ЩЕЛЕВЫМ СКАНИРУЮЩИМ СЕНСОРОМ | 2016 |
|
RU2641630C2 |
| СПОСОБ УСТРАНЕНИЯ ИСКАЖЕНИЙ ИЗОБРАЖЕНИЙ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ, СВЯЗАННЫХ СО СЛОЖНОЙ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ НОСИТЕЛЯ СЕНСОРА ИЗОБРАЖЕНИЯ | 2009 |
|
RU2411449C1 |
| СПОСОБ ОБРАБОТКИ СКАНЕРНЫХ СНИМКОВ | 2023 |
|
RU2798768C1 |
| Способ идентификации растительных объектов по космическим снимкам дистанционного зондирования | 2018 |
|
RU2693880C1 |
| Способ выделения границ водных объектов и ареалов распространения воздушно-водной растительности по многоспектральным данным дистанционного зондирования Земли | 2020 |
|
RU2750853C1 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ И КОПИРОВАНИЯ | 2004 |
|
RU2368091C2 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ | 2004 |
|
RU2298292C2 |
| Многозональное сканирующее устройство с матричным фотоприёмным устройством | 2016 |
|
RU2654300C1 |
Изобретение относится к области исследования поверхности земли щелевым гиперспектральным сенсором дистанционного зондирования. Техническим результатом является отсутствие необходимости в использовании дополнительного кадрового сенсора, а также упрощение реализации, точности и быстродействия зондирования. Технический результат достигается тем, что получают последовательности строк сканирующего сенсора и записывают их на запоминающее устройство, получают значения угла крена синхронно с получением строк изображения, с использованием которых определяют количество пикселей смещения в строке, корректируют каждую строку, путем сдвига индексов пикселей в строке на определенное количество пикселей смещения влево или вправо в зависимости от значения и направления угла крена. 4 ил.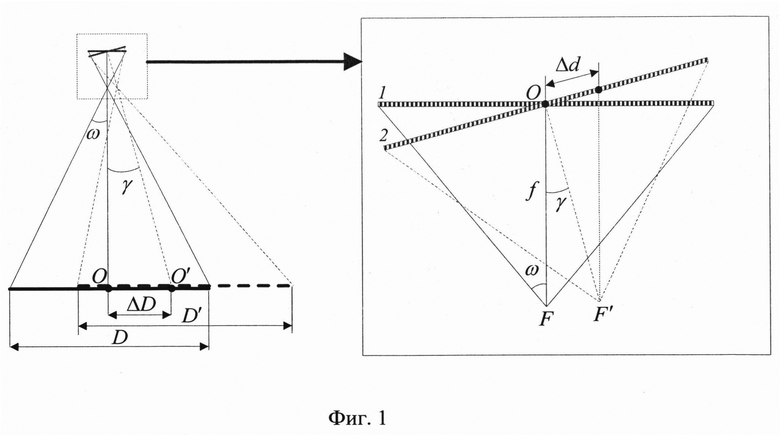
Способ коррекции геометрических искажений гиперспектральных изображений, включающий получение последовательности строк сканирующего сенсора и их запись на запоминающее устройство, отличающийся тем, что дополнительно получают значения угла крена синхронно с получением строк изображения, с использованием которых определяют количество пикселей смещения в строке, корректируют каждую строку, путем сдвига индексов пикселей в строке на определенное количество пикселей смещения влево или вправо в зависимости от значения и направления угла крена.
| CN 103810701 A, 21.05.2014 | |||
| EP 3049776 A2, 03.08.2016 | |||
| JP 2009271895 A, 19.11.2009. |
