Изобретение относится к области алгоритмического обеспечения информационно-измерительных систем, применяемых в железнодорожных машинах с бесконтактным считывающим устройством для определения положения шпал, а также прибором для измерения пройденного машиной расстояния и устройством управления для центрирования рабочего устройства, и может применяться для бесконтактного считывания положения шпал и определения путевой координаты их центра.
Из уровня техники известны система и способ для контроля железнодорожного пути (патент RU 2385446, опубликовано 27.03.2010, МПК: G01C 3/08 (2006.01)). Способ контроля железнодорожного пути состоит из нескольких этапов, на которых с помощью устройства лазерного подсвета освещают линию от края до края железнодорожного пути; принимают часть света, отраженного от железнодорожного полотна; генерируют и анализируют совокупность полученных изображений; обрабатывают совокупность изображений; записывают соответствующее географическое местоположение изображений с помощью приемника GPS или дистанционного устройства для определения данных о местоположении; отображают физические характеристики участка железнодорожного пути. Обработка совокупности изображений заключается, в том числе, в восстановлении сечений анализируемого участка пути вертикальными плоскостями, что позволяет с помощью системы, реализующей способ, проводить измерения, которые включают в себя, но без ограничения: расстояние между шпалами, угол шпал относительно рельса, трещины и дефекты в поверхности шпал, отсутствующие, не выровненные или осевшие рельсовые подкладки, отсутствующие, поврежденные или не выровненные крепежные детали, изношенные или поврежденные изоляторы, износ рельсов, колею между рельсами, высоту щебеночного слоя относительно шпал, размер щебня и разрыв или разделение в рельсе. Система включает в себя один или несколько алгоритмов для определения измеряемых параметров железнодорожного пути.
Поскольку алгоритмы обработки изображений, в частности - алгоритмы 3D реконструкции по информации от регистрирующей камеры и устройства лазерного подсвета - требуют выполнения большого количества арифметических операций для своей реализации (Hartley R., Zisserman А. Multiple View Geometry in Computer Vision: 2nd edition. Cambridge: Cambridge University Press, 2003. 656 p) и наличия хранилища данных для фиксации кадров с камеры, автор патента в его описании уточняет, что для эффективной обработки всех данных, полученных с помощью указанной системы контроля железнодорожного пути, устройство обработки, согласно предпочтительному варианту своего осуществления, включает в себя компьютер, имеющий быстродействующий процессор, например Intel Pentium 4 с тактовой частотой 2,8 ГГц, а для эффективного хранения всех данных, предпочтительно, включает в себя два жестких диска большой емкости, сконфигурированных для использования одновременно обоих механизмов чтения/записи как один привод, что также известно под названием системы избыточного массива независимых дисков RAID. Требования к производительности процессора и объему хранилища данных можно отнести к недостаткам известного способа.
Из уровня техники также известны машина и способ для определения положения шпал рельсового пути (патент RU 2228988, опубликовано 20.05.2004, МПК: Е01В 35/06, G01C 3/00). Данное изобретение относится к машинам с измерительной аппаратурой, используемой при сооружении рельсовых путей. Машина имеет для определения положения шпал на рельсовом пути бесконтактное считывающее устройство в сочетании с прибором для измерения расстояния при регистрации пройденного машиной пути. Считывающее устройство представляет собой дальномер для бесконтактного определения значений дистанции по вертикали между машиной и путем. Устройство управления, связанное с дальномером, служит для непрерывной и последовательной разбивки контролируемого пути на измеряемые участки - соответственно на 1) опознанный участок со шпалой, включающий только в незначительной степени отличающиеся друг от друга данные измерений дистанции, и 2) на примыкающий к нему и находящийся между шпалами участок с щебнем между шпалами. Способ определения положения шпал рельсового пути характеризуется использованием последовательности скачкообразно измененных данных измерений дистанции по вертикали на границах «щебень-шпала» и по совокупности признаков выбран в качестве прототипа.
Согласно способу прототипа при продвижении шпалоподбивочной машины измеряют пройденный путь s и считывают бесконтактным способом положение шпал. При этом вдоль измерительной линии, проходящей в продольном направлении пути над шпалами и щебнем, непрерывно получают и записывают в память данные измерений дистанции d в вертикальном направлении между машиной и щебнем или шпалой. Затем полученную таким образом и контролируемую по пути кривую измерений делят на опознанный участок со шпалой X, на котором имеются лишь минимальные изменения в данных измерений, а начало находится в первой зарегистрированной точке скачка А, за которым следует опознанный участок с щебнем Y, примыкающий к нему соответственно в точке скачка В и характеризующийся следующим друг за другом рядом скачкообразно изменяющихся величин измерения дистанции d, максимальные значения которых находятся за пределами минимальной ширины полосы m.
Как следует из описания способа, он априори предполагает, что поверхности шпал, к которым прилегают рельсы пути, лежат выше среднего уровня щебня между шпалами, чтобы при выполнении дифференцирования сигнала высоты проявлялись ярко выраженные пики (скачки) первой производной d на границе «щебень-шпала», которой соответствует отрицательный пик большой амплитуды, и «шпала-щебень», которой соответствует положительный пик большой амплитуды.
Однако в случае, когда средний уровень щебня между шпалами отличается от уровня верхних поверхностей шпал не более чем на 2-3 см, применение способа прототипа для детектирования границ шпал может приводить к ложным срабатываниям (при низком пороге обнаружения границ «шпала-щебень» и «щебень-шпала») либо к пропускам границ (при высоком пороге).
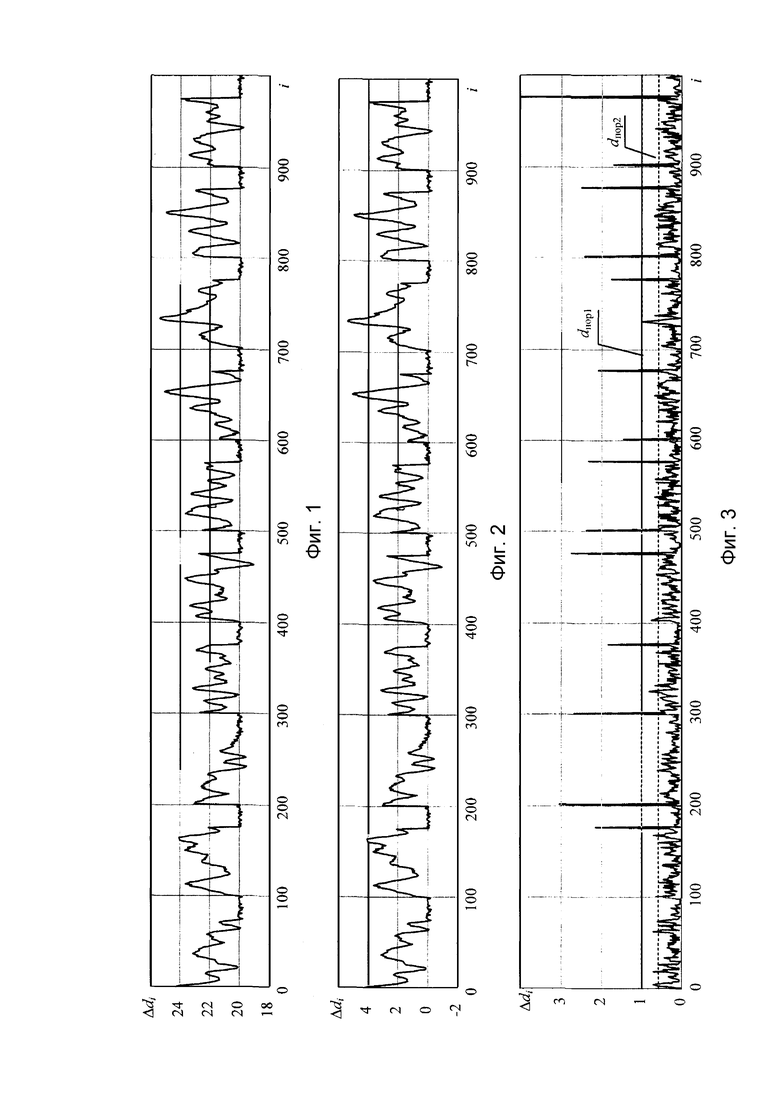
Рассмотрим данную ситуацию на примере математической модели, в которой сигнал бесконтактного измерителя дистанции d имитируется в виде аддитивной смеси следующих компонент в i-й момент времени:
- показаний бесконтактного дальномера dшпi без шумов измерений для идеального профиля шпал; в модели задается периодической последовательностью прямоугольных импульсов;
- показаний бесконтактного дальномера без шумов измерений для участка со щебнем dщебi; для данных отражений характерны шумоподобные флуктуации, которые в модели задаются в виде узкополосного случайного процесса с относительной шириной спектра ΔƒT; указанный случайный процесс может быть сгенерирован из выборки белого гауссовского шума с помощью формирующего фильтра скользящего среднего согласно алгоритму из монографии (Кошелев В.И. АРСС-модели случайных процессов. Прикладные задачи синтеза и оптимизации. М.: Радио и связь, 2002. 112 с.);
- шумов измерений ni, имитируемых математической моделью белого гауссовского шума с нулевым математическим ожиданием и дисперсией Dш.
Результаты моделирования для ΔƒT=0,1, Dш=0,1 см2, дистанции в вертикальной плоскости от бесконтактного дальномера до плоскости шпалы dшп=20 см и превышении высоты шпал над средним уровнем щебня в 2 см приведены на фиг.1
Согласованный фильтр максимизирует отношение сигнал-шум на выходе, если постоянная составляющая шумовой компоненты на его входе равна нулю. Поскольку расстояние до уровня щебня априори не известно, то для приближения постоянной составляющей отражений от щебня к нулю предлагается из измерений дальномера d вычитать априори известную высоту до шпал dшп (фиг.2).
Результаты дифференцирования сигнала с фиг.1 для выделения границ шпал согласно способу прототипа приведены на фиг.3, где приведен модуль первой производной d. При этом в соответствии с критерием обнаружения Неймана - Пирсона (Бакулев П.А. Радиолокационные системы: учебник для вузов; изд. 3-е, перераб. и доп.М.: Радиотехника, 2015. 440 с.) установка высокого (dпор1=1 см) порога принятия решения приводит на девяти пролетах между шпалами к пропускам пяти границ шпал, а установка низкого порога (dпор2=0,6 см) - к появлению более чем десяти ложных обнаружений.
Техническая проблема заключается в том, что эвристический подход способа прототипа к обнаружению границ «шпала-щебень» и «щебень-шпала» при малой (2-3 см) разнице между уровнями шпал и щебня не позволяет одновременно и фиксировать уровень ложных срабатываний, и обеспечить высокую вероятность правильного обнаружения границ шпал.
Технический результат, решаемый созданием заявленного изобретения, заключается в применении для выделения границ шпалы алгоритмов согласованной фильтрации.
Технический результат достигается следующим образом. Известно (Вакман Д.Е. Сложные сигналы и принцип неопределенности в радиолокации. М.: Советское радио, 1965. 304 с), что для согласованного с обнаруживаемым сигналом фильтра максимум амплитуды на выходе наблюдается в момент времени, соответствующем окончанию действия полезного сигнала. Выходной сигнал согласованного фильтра рассчитывается как результат свертки временной реализации принятого на фоне шумов и помех сигнала с импульсной характеристикой согласованного фильтра, которая, в свою очередь, является зеркальным отражением временной реализации априори известного полезного сигнала.
Для непрерывного сигнала результат согласованной фильтрации определяется выражением:

где sвых(t) - сигнал на выходе согласованного фильтра, sвх(t) - сигнал на входе согласованного фильтра, g(t) - импульсная характеристика согласованного фильтра.
Поскольку в подавляющем большинстве современных измерительных устройств и устройств обнаружения сигналов применяется цифровая обработка сигналов, то для них согласованной фильтрации подвергаются дискретные по времени и квантованные по уровню выборки, состоящие из отсчетов сигнала, взятых с частотой дискретизации Fд. Выражение (1) для цифрового сигнала примет вид:

где zвых - вектор отсчетов с выхода согласованного фильтра, sвх - вектор отсчетов сигнала на входе согласованного фильтра, g - вектор отсчетов импульсной характеристики согласованного фильтра,  - обозначение оператора свертки.
- обозначение оператора свертки.
Если, как и в способе прототипа, для обнаружения границ шпал задействован прибор для измерения расстояния при регистрации пройденного железнодорожной машиной пути, то по его показаниям можно получить оценку скорости движения железнодорожной машины. Это при априори известных параметрах формы профиля шпалы, расстоянии между шпалами и частоте дискретизации Fд позволяет получить оценку формы обнаруживаемого сигнала отражений от шпал и в соответствии с адаптивным байесовским подходом (Репин В.Г., Тартаковский Г.П. Статистический синтез при априорной неопределенности и адаптация информационных систем. М: Сов. радио, 1977. 432 с.) использовать ее вместо априори неизвестной формы полезного сигнала при синтезе согласованного фильтра.
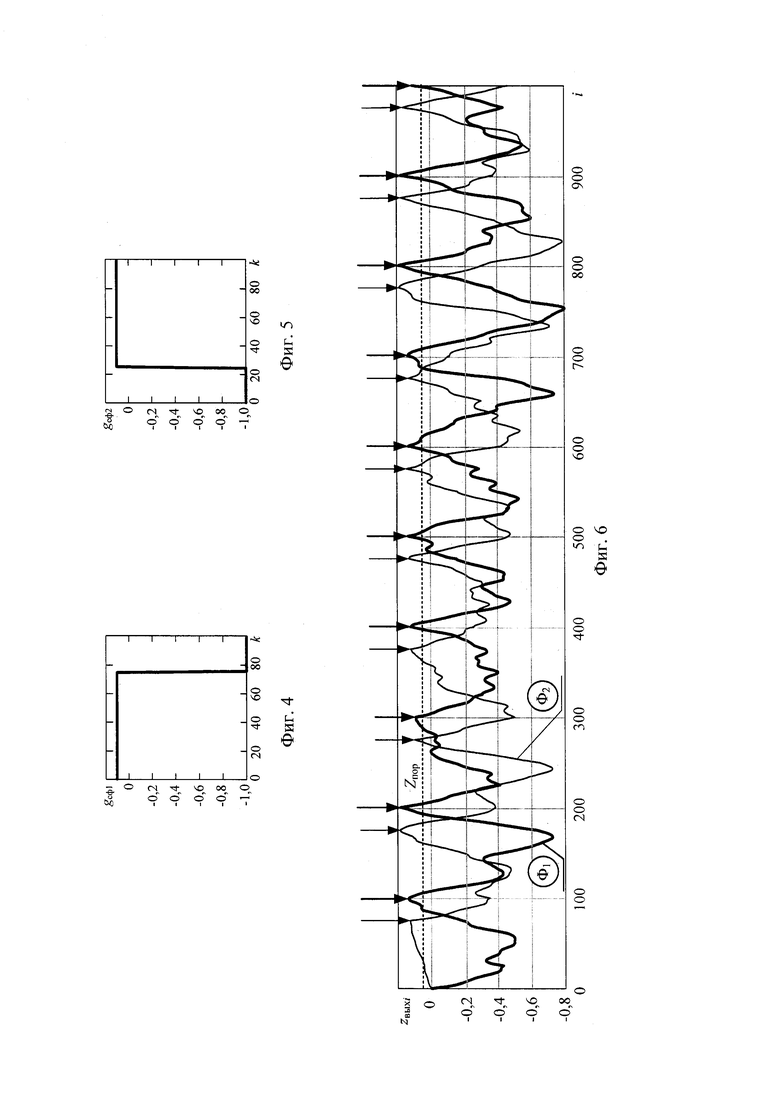
Например, если априори известно, что расстояние между шпалами в 3 раза больше ширины шпалы, а скорость движения железнодорожной машины такова, что в среднем расстояние между двумя соседними шпалами она проходит за 100 интервалов дискретизации сигнала бесконтактного дальномера, то временные диаграммы для импульсных характеристик согласованных фильтров Ф1 и Ф2, предназначенных для определения моментов времени, соответствующих:
1) окончанию текущей шпалы,
2) началу предыдущей шпалы,
будут иметь вид, показанный на фиг.4 и фиг.5 соответственно, и определяться аналитическими выражениями (3) и (4):


где в выражениях (3) и (4) параметры а1 и а2 соответственно равны:
а1=0,1, а2=-1.
Результаты фильтрации временной реализации входного сигнала с фиг.2 двумя согласованными фильтрами Ф1 и Ф2 с импульсными характеристиками фиг.4 и фиг.5 соответственно приведены на фиг.6.
Поиск точек локальных максимумов для сигналов с выходов согласованных фильтров Ф1 и Ф2, превысивших порог Zпор, и соответствующих им моментов времени (показаны на фиг.6 стрелками) позволяет определить моменты времени t1 и t2 проезда над точками начала и окончания шпалы. С учетом сведений от прибора для измерения расстояния при регистрации пройденного машиной пути s(t) по измерениям t1, t2 далее можно оценить текущие путевые координаты точек начала и окончания шпалы R1=s(t1) и R2=s(t2), а по ним - путевую координату центра шпалы:

Порог обнаружения границы шпалы Zпор устанавливают по критерию Неймана - Пирсона исходя из допустимого уровня вероятности ложных обнаружений границ шпал.
Изобретение относится к области алгоритмического обеспечения информационно-измерительных систем, применяемых в железнодорожных машинах с бесконтактным считывающим устройством для определения положения шпал. Способ определения положения шпал рельсового пути основан на получении отсчетов измерений дистанции d в вертикальном направлении между машиной и щебнем или шпалой, при этом для регистрации точек начала и окончания шпалы применяют два цифровых фильтра Ф1 и Ф2, импульсные характеристики которых выбираются таким образом, что являются зеркальными отражениями ожидаемых временных реализаций сигнала измерителя дистанции d для участков 1) «щебень-шпала» и 2) «шпала-щебень» соответственно по информации о скорости движения машины при априори известных ширине шпалы, среднем расстоянии между шпалами и частоте дискретизации Fд сигнала бесконтактного измерителя дистанции d. На вход цифровых согласованных фильтров Ф1 и Ф2 подают сигнал с вычтенной априори известной дистанцией до шпалы в вертикальном направлении dшп, а для сигналов с выходов фильтров Ф1 и Ф2 выполняют поиск точек локальных максимумов, превышающих порог Zпор, определяют соответствующие им моменты времени t1 и t2 проезда над точками начала и окончания шпалы. Далее по информации от прибора для измерения расстояния при регистрации пройденного машиной пути s(t) оценивают текущие путевые координаты точек начала и окончания шпалы R1=s(t1) и R2=s(t2) и вычисляют по ним путевую координату центра шпалы Rцш=0,5(R1+R2). Порог обнаружения границы шпалы устанавливают по критерию Неймана-Пирсона исходя из допустимого уровня вероятности ложных обнаружений границ шпал. В результате обеспечивается высокая вероятность правильного обнаружения границ шпал. 1 з.п. ф-лы, 6 ил. 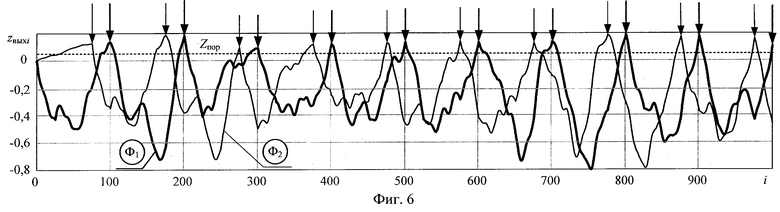
1. Способ определения положения шпал рельсового пути, в котором при продвижении железнодорожной машины измеряют пройденный путь s и считывают бесконтактным способом положение шпал, при этом вдоль измерительной линии, проходящей в продольном направлении пути над шпалами и щебнем, получают и записывают в память данные измерений дистанции d в вертикальном направлении между машиной и щебнем или шпалой, после чего в полученных таким образом измерениях выделяют участок со шпалой, отличающийся тем, что измерения дистанции d являются дискретными по времени и квантованными по уровню, для регистрации точек начала и окончания шпалы применяют два цифровых фильтра Ф1 и Ф2, импульсные характеристики которых выбираются таким образом, что являются зеркальными отражениями ожидаемых временных реализаций сигнала измерителя дистанции d для участков 1) «щебень-шпала» и 2) «шпала-щебень» соответственно по информации о скорости движения машины при априори известных ширине шпалы, среднем расстоянии между шпалами и частоте дискретизации Fд сигнала бесконтактного измерителя дистанции d, при этом на вход фильтров Ф1 и Ф2 подают сигнал с вычтенной априори известной дистанцией до шпалы в вертикальном направлении dшп, а для сигналов с выходов фильтров Ф1 и Ф2 выполняют поиск точек локальных максимумов, превышающих порог Zпор, определяют соответствующие им моменты времени t1 и t2 проезда над точками начала и окончания шпалы, по информации от прибора для измерения расстояния при регистрации пройденного машиной пути s(t) оценивают текущие путевые координаты точек начала и окончания шпалы R1=s(t1) и R2=s(t2) и вычисляют по ним путевую координату центра шпалы Rцш=0,5(R1+R2).
2. Способ по п. 1, отличающийся тем, что порог обнаружения границы шпалы устанавливают по критерию Неймана-Пирсона исходя из допустимого уровня вероятности ложных обнаружений границ шпал.
| МАШИНА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2228988C2 |
| УПРАВЛЯЕМАЯ ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2011 |
|
RU2554205C2 |
| CN 108086070 A, 29.05.2018 | |||
| CN 107299569 B, 05.03.2019 | |||
| Машина для стабилизации железнодорожного пути | 1980 |
|
SU931890A1 |
