Область техники, к которой относится изобретение
Изобретение относится к машиностроению, а именно, к системам управления и контроля гидравлических приводов штанговых глубинных насосов.
Уровень техники
Известна система управления гидравлическим приводом штангового насоса, которая содержит комплект электрогидравлической аппаратуры (патент 2767669, публ. 18.03.2022, патентообладателем, которого является заявитель настоящей заявки). Система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер, подключенный через дискретные выходы по меньшей мере к двум промежуточным реле, соединенным с по меньшей мере двумя электромагнитами, дискретные входы программируемого логического контроллера соединены с выходами по меньшей мере двух датчиков уровня рабочей жидкости (например, масла) в гидравлическом баке (гидробаке), аналоговые входы программируемого логического контроллера соединены с аналоговыми выходами по меньшей мере двух датчиков температуры и по меньшей мере двух датчиков давления. В программируемый логический контроллер через дискретные и аналоговые входы поступают сигналы о неисправности упомянутых датчиков, на основании этих сигналов происходит переключение на соответствующий резервный датчик. Соответствующие дискретные и аналоговые выходы программируемого логического контроллера соединены с соответствующими входами двух частотных преобразователей каждого из двух асинхронных электродвигателей, соединенных, в свою очередь, с соответствующими гидромоторами напорных линий насосной станции. На основании настроек оператора или при обнаружении неисправности электрогидравлической аппаратуры одной из напорных линий программируемый логический контроллер через дискретные и аналоговые выходы регулирует частоту асинхронных электродвигателей и управляет их включением или отключением для обеспечения работы глубинного оборудования с заданным количеством двойных ходов штока гидроцилиндра. Таким образом, система управления изменяет скорость вращения асинхронных электродвигателей, которые управляют движением штока гидроцилиндра привода глубинного штангового насоса, что ведет к увеличению объемов подъема пластовой жидкости, увеличению диапазона регулирования параметров работы штангового глубинного насоса и увеличению надежности работы системы в целом.
Недостатком известной системы управления является узкий диапазон управления характеристиками гидравлической аппаратуры, который не обеспечивает возможность одновременной эксплуатации двух раздельных скважин, и требует установки дополнительного наземного оборудования для управления каждым из эксплуатируемых пластов или скважин, или обеспечивает добычу небольшого объема пластовой жидкости.
Сущность изобретения
Проблемой, на решение которой направлено заявляемое изобретение, является недостаточная эффективность работы глубинного оборудования, такого как штанговые глубинные насосы, и необходимость увеличивать количество комплектов наземного оборудования, а также изменять параметры работы каждого штангового насоса на основании данных вспомогательного оборудования, такого как эхолот и расходомер.
Техническим результатом, достигаемым при осуществлении заявленного изобретения, является увеличение добычи пластовой жидкости за единицу времени без увеличения количества наземного оборудования за счет автоматического управления электрогидравлической аппаратурой (гидравлические блоки, гидромоторы, гидроклапаны, датчики, электромоторы и прочее оборудование гидравлической насосной станции), которая входит в состав привода, что обуславливает повышение эффективности добычи пластовой жидкости за счет обеспечения работы нескольких одновременно работающих штанговых глубинных насосов одним приводом.
Указанный технический результат достигается тем, что система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер (ПЛК), соединенный через дискретные входы модуля дискретного ввода с выходами двух датчиков уровня масла в маслобаке гидравлической насосной станции штангового глубинного насоса, и соединенный через аналоговые входы модуля аналогового ввода с аналоговыми выходами двух датчиков температуры и двух датчиков давления, а через соответствующие дискретные выходы модуля дискретного вывода и аналоговые выходы модуля аналогового вывода соединенные с соответствующими входами двух частотных преобразователей, каждого из двух асинхронных двигателей двух напорных линий насосной станции, на основании предварительно заданных оператором настроек раздельно для каждого из двух комплектов электрогидравлической аппаратуры каждого из двух контуров напорных линий, которые соединяют гидравлическую насосную станцию с соответствующими гидроцилиндрами штанговых колонн штанговых глубинных насосов, на основании данных об уровне пластовой жидкости в скважинах и объеме поднимаемой пластовой жидкости, полученных раздельно от первого эхолота и первого расходомера, и второго эхолота и второго расходомера, программируемый логический контроллер через модуль аналогового вывода выполнен с возможностью по-отдельности регулировать скоростные характеристики каждого из двух асинхронных двигателей для обеспечения независимой работы глубинного оборудования с заданным количеством двойных ходов каждого из двух штоков гидроцилиндров. Программируемый логический контроллер (ПЛК) соединен с первым и вторым эхолотами, и первым и вторым расходомерами через сетевой интерфейс RS-485 по протоколу Modbus RTU.
Краткое описание чертежей
На фиг. 1 представлена функциональная схема системы управления гидравлическим приводом штангового насоса;
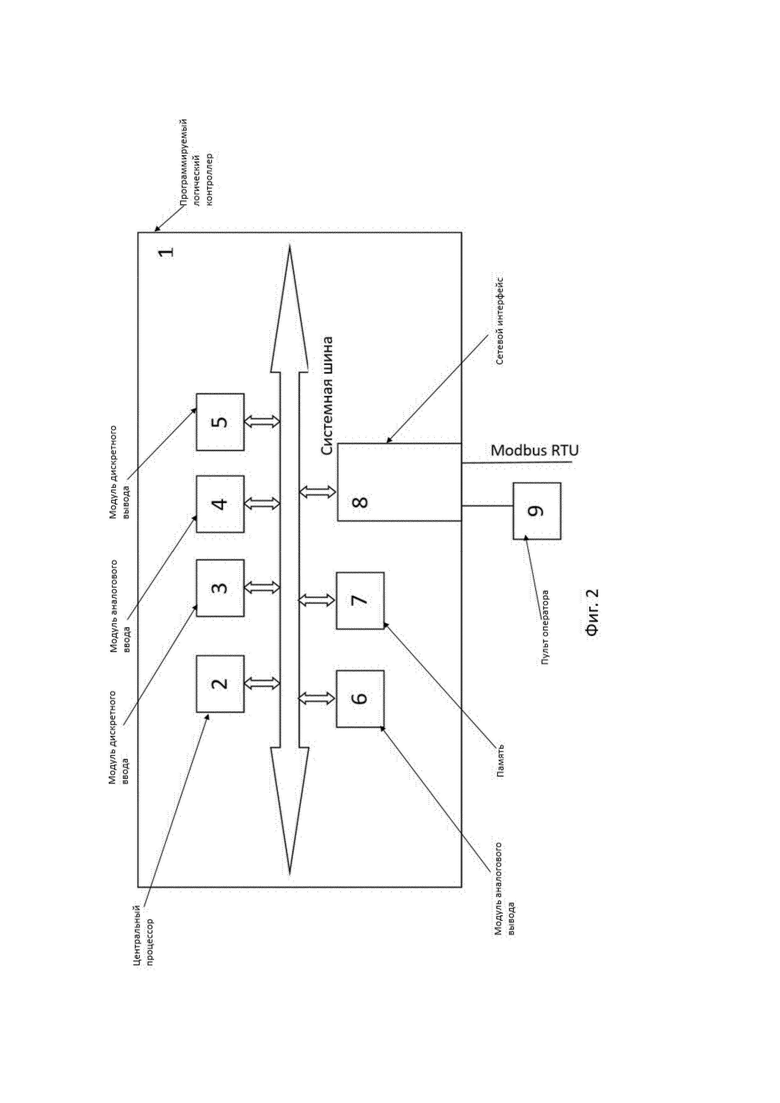
На фиг.2 представлена блок-схема программируемого логического контроллера.
Осуществление изобретения
При эксплуатации одной скважины может возникнуть необходимость добычи пластовой жидкости из двух близко расположенных соседних скважин, в таком случае встает вопрос о размещении наземного оборудования наиболее оптимальным образом с учетом необходимых измерений, требуемых для наилучшей эксплуатации скважин. Таковым является установка единого комплекта наземного оборудования, способного автоматически управлять двумя штанговыми глубинными насосами с учетом показателей состояния скважины.
Штанговые глубинные насосы вместе с НКТ и колонной штанг спускаются в соответствующие скважины, плунжеры штанговых глубинных насосов через колонны штанг соединены со штоками соответствующих гидроцилиндров, эхолоты закрепляются на устьевом скважинном оборудовании, соединенном с затрубным пространством скважины, а расходомеры устанавливаются в линии скважинного оборудования, соединенного с НКТ, при этом эхолоты и расходомеры соединены по кодовой линии связи с ПЛК. ПЛК оценивает работу глубинного оборудования через датчики положения штанговращателя, температуры, давления, уровня рабочей жидкости, частотные преобразователи, с которыми соединен по проводной линии связи.
Система управления гидравлическим приводом штангового глубинного насоса содержит программируемый логический контроллер (1) (далее ПЛК), содержащий центральный процессор (2), модуль (3) дискретного ввода, модуль (4) аналогового ввода, модуль (5) дискретного вывода, модуль 6 аналогового вывода, память (7), сетевой интерфейс (8), и пульт (9) оператора, соединенный с ПЛК (1) (фиг 1, 2).
Согласно фиг.1, аналоговый выход модуля (5) аналогового вывода и дискретный выход модуля дискретного (6) вывода подключены к соответствующим входам частотных преобразователей (10-1,10-2), выходная силовая шина которых подключена к соответствующим электродвигателям (11-1,11-2) гидромоторов гидравлических приводов двух штанговых глубинных насосов, а входная силовая шина к рубильнику питающей сети 12. В модуле (3) дискретного ввода ПЛК (1) первый дискретный вход подсоединен к выключателю 13, второй и третий дискретные входы подключены к первому и второму выходу частотного преобразователя (10-1), а шестой и седьмой дискретные входы подключены к первому и второму выходу частотного преобразователя (10-2). Второй и четвертый дискретные выходы модуля (5) дискретного вывода ПЛК (1) подключены к промежуточным реле (14-1,14-2), соединенным с электромагнитами (15-1,15-2) соответственно, управляющими гидроблоками напорных линий. Первый и второй аналоговые входы модуля (4) аналогового ввода ПЛК (1) подключены к датчикам (16-1, 16-2) давления, которые установлены в первой и второй напорных линиях соответственно, третий и четвертый аналоговые входы подключены к датчикам (17-1,17-2) температуры, которые установлены в маслобаке и предназначены для контроля температуры рабочей жидкости. Восьмой и девятый дискретные входы модуля (3) дискретного ввода подключены к первому датчику (18-1) уровня рабочей жидкости в маслобаке и второму датчику (18-2) уровня рабочей жидкости в маслобаке. Четвертый и пятый дискретные входы модуля (3) дискретного ввода ПЛК (1) соединены с двумя датчиками (19-1) положения штанговращателя, расположенными на опоре первого гидроцилиндра и предназначенными для определения соответствующего положения штанговращателя относительно опоры. Десятый и одиннадцатый дискретные входы модуля (3) дискретного ввода ПЛК (1) соединены с двумя датчиками (19-2) положения штанговращателя, расположенными на опоре второго гидроцилиндра и предназначенными для определения соответствующего положения штанговращателя относительно опоры. Эхолоты (20-1,20-2) и расходомеры (21-1,21-2) каждой скважины или для каждого пласта одной скважины подключены к сетевому интерфейсу (8) RS-485 ПЛК (1), например, по протоколу Modbus RTU.
Система управления работает следующим образом.
ПЛК (1) начинает работу (при нормальных условиях эксплуатации) при подаче дискретного сигнала от источника постоянного напряжения (на схеме не показан) на первый дискретный вход модуля (3) дискретного ввода посредством выключателя (13) «Пуск/Стоп». Напряжение силовой питающей сети, а также напряжение к источникам питания датчиков привода штангового глубинного насоса и ПЛК (1) (на схеме не показаны), подается через вводной рубильник (12). Датчики (19-1) положения штанговращателя, расположены на опоре первого гидроцилиндра, а датчики (19-1,19-2) положения штанговращателя расположены на опоре второго гидроцилиндра и предназначены для определения соответствующего положения каждого штанговращателя относительно соответствующей опоры. Датчики (19-1,19-2) установлены по два для верхнего и нижнего положения штанговращателя, соответственно. Срабатывание датчиков (19-1,19-2) штанговращателя подтверждает факт смены направления его движения вниз или вверх, соответственно.
Электромагниты (15-1,15-2), которые управляют открытием/закрытием гидроклапанов в гидроблоках соответствующих напорных линий, настроены на открытие/закрытие соответствующей напорной линии для каждого из двух гидроцилиндров по-отдельности в соответствии с заданным через пульт оператора количеством двойных ходов штоков гидроцилиндров. ПЛК (1) контролирует состояние датчика (17-1) температуры и датчика (18-1) уровня рабочей жидкости в гидробаке, при фиксации неисправности любого из перечисленных датчиков (например, отсутствие сигнала от датчика, выход значения сигнала за допустимые минимальные или максимальные значения), ПЛК (1) переходит на работу с соответствующими резервными датчиками (17-2, 18-2).
При начале работы ПЛК (1) работает через частотный преобразователь (10-1) с электрогидравлической аппаратурой первой напорной линии и через частотный преобразователь (10-2) с электрогидравлической аппаратурой второй напорной линии. Частотные преобразователи (10-1,10-2), подключены через соответствующие автоматы токовой защиты (на схеме не показаны).
ПЛК (1), через первый дискретный выход модуля (5) дискретного вывода, который соединен с первым дискретным входом частотного преобразователя (10-1), выдает сигнал о направлении движения асинхронного двигателя (11-1), а через первый аналоговый выход модуля (6) аналогового вывода, который соединен с первым аналоговым входом частотного преобразователя (10-1), путем установки предварительно заданного значения задаваемой частоты (количество оборотов) асинхронного двигателя (11-1), проверяет возможность выхода на предварительно заданные через пульт (9) оператора скоростные параметры движения первого гидроцилиндра первого штангового глубинного насоса, иными словами, выявляет то, позволяет ли предварительно заданное количество оборотов двигателя (11-1) обеспечивать приводу первого штангового глубинного насоса предварительно заданное количество двойных ходов в минуту. Двойной ход определяется как прохождение штока от нижнего до верхнего датчика положения штанговращателя и обратно. Если достижение предварительно заданных скоростных параметров движения первого гидроцилиндра первого штангового глубинного насоса не происходит, то есть привод не может обеспечивать предварительно заданное количество двойных ходов в минуту, ПЛК (1) меняет значения частоты переменного тока асинхронного двигателя (11-1) в диапазоне, допустимом для используемых двигателей, для того, чтобы обеспечить требуемые скоростные параметры движения первого гидроцилиндра.
Затем ПЛК (1) переходит к проверке скоростных параметров движения второго гидроцилиндра второго штангового глубинного насоса, путем выдачи через третий дискретный выход модуля (5) дискретного вывода, который соединен с первым дискретным входом частотного преобразователя (10-2), сигнала о направлении движения асинхронного двигателя (11-2), и установки предварительного значения задаваемой частоты (количество оборотов) через первый аналоговый выход модуля (6) аналогового вывода, который соединен с первым аналоговым входом частотного преобразователя (10-2), и, если они не соответствуют предварительно заданным через пульт (9) оператора параметрам, изменяет скоростные параметры движения второго гидроцилиндра второго штангового глубинного насоса путем изменения задаваемой частоты асинхронного двигателя (11-2).
Первый и второй дискретные выходы частотного преобразователя (10-2) соединены с четвертым и шестым дискретными входами модуля (3) дискретного ввода ПЛК (1). В процессе изменения скоростных характеристик движения гидроцилиндров первого и второго штанговых глубинных насосов, ПЛК (1) с предварительно заданной периодичностью оценивает уровни пластовой жидкости в скважинах, используя данные опроса первого и второго эхолотов (20-1,20-2), соответственно, а также объем поднимаемой пластовой жидкости, используя данные первого и второго расходомеров (21-1,21-2), соответственно. ПЛК (1) в процессе управления электрогидравлической аппаратурой первого и второго штанговых глубинных насосов по подъему пластовой жидкости, с предварительно заданной оператором периодичностью, опрашивает по кодовой линии связи (например, по протоколу MOLBUS RTU) расходомеры (21-1, 21-2) первой и второй скважин, соответственно, на предмет объема поднятой пластовой жидкости и эхолот (20-1, 20-2) на предмет уровня пластовой жидкости в первой и второй скважинах, и, путем изменения предварительно заданного количества двойных ходов штока гидроцилиндра, обеспечивает максимальный дебит пластовой жидкости и не допускает критического снижения уровня жидкости в скважине. В зависимости от изменения данных, полученных от первого и второго эхолотов (20-1, 20-2) и первого и второго расходомеров (21-1, 21-2), ПЛК (1) изменяет заданные скоростные параметры движения каждого гидроцилиндра на основании предварительно заданных через пульт оператора пределов возможных изменений количества двойных ходов штока гидроцилиндров соответствующих штанговых глубинных насосов.
В системе управления гидравлическим приводом штангового глубинного насоса при функционировании с двумя гидроцилиндрами (т.е. двумя штанговыми глубинными насосами), электромагниты (15-1, 15-2) гидроклапанов обеспечивают работу гидроблоков электрогидравлической аппаратуры гидравлической насосной станции по разделенным двум напорным линиям по отдельности в соответствии с заданным количеством двойных ходов штоков гидроцилиндров. Управление движением первого и второго гидроцилиндров осуществляется через частотные преобразователи (10-1, 10-2) каждого из двух асинхронных двигателей двух напорных линий насосной станции, и двигатель (11-1, 11-2) с гидромотором, которые относятся к электрогидравлической аппаратуре гидравлической насосной станции и соединены между собой полумуфтами, соответственно. ПЛК (1), получая сигнал о прохождении штанговращателем верхнего и нижнего датчиков (19-1,19-2) положения штанговращателя рассчитывает по времени прохождения между датчиками (19-1,19-2) положения штанговращателя количество двойных ходов штока гидроцилиндра в минуту, если это значение не соответствует предварительно заданному через пульт оператора, то ПЛК (1) выдает в частотный преобразователь (10-1,10-2) асинхронного двигателя измененное значение частоты переменного тока, которое изменяет скорость вращения двигателя и, соответственно, скорость вращения гидромотора, который изменяет объем рабочей жидкости, передаваемой из маслобака в гидроцилиндр, т.е. меняет скорость возвратно-поступательного движения штока гидроцилиндра.
Таким образом, система управления, по-отдельности изменяя скорость вращения асинхронных двигателей первой и второй напорной линии осуществляет независимое управление первым и вторым гидроцилиндрами и, соответственно, двумя штанговыми глубинными насосами, что ведет к оптимизации объемов поднимаемой пластовой жидкости без установки дополнительного наземного оборудования, снижению металлоёмкости наземного оборудования и повышению эффективности добычи пластовой жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2018 |
|
RU2676898C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2021 |
|
RU2767669C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| ГИДРОПРИВОД НАСОСНОЙ СКВАЖИННОЙ УСТАНОВКИ | 2022 |
|
RU2793863C1 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| Пресс гидравлический для изготовления клееного бруса | 2022 |
|
RU2795614C1 |
| Установка реагентной подачи | 2022 |
|
RU2796179C1 |
| Пресс испытательный электрогидравлический | 2023 |
|
RU2818547C1 |
| ГРУППОВОЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ (ВАРИАНТЫ) | 2001 |
|
RU2196250C2 |
| Установка для одновременной добычи нефти из двух пластов | 2016 |
|
RU2630835C1 |

Изобретение относится к машиностроению, а именно к системам управления и контроля гидравлических приводов штанговых глубинных насосов. Система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер (ПЛК), соединенный через дискретные входы модуля дискретного ввода с выходами двух датчиков уровня масла в маслобаке гидравлической насосной станции штангового глубинного насоса и соединенный через аналоговые входы модуля аналогового ввода с аналоговыми выходами двух датчиков температуры и двух датчиков давления, а через соответствующие дискретные выходы модуля дискретного вывода и аналоговые выходы модуля аналогового вывода соединенный с соответствующими входами двух частотных преобразователей каждого из двух асинхронных двигателей двух напорных линий насосной станции, на основании предварительно заданных оператором настроек раздельно для каждого из двух комплектов электрогидравлической аппаратуры каждого из двух контуров напорных линий, которые соединяют гидравлическую насосную станцию с соответствующими гидроцилиндрами штанговых колонн штанговых глубинных насосов, на основании данных об уровне пластовой жидкости в скважинах и объеме поднимаемой пластовой жидкости, полученных раздельно от первого эхолота и первого расходомера и второго эхолота и второго расходомера, программируемый логический контроллер через модуль аналогового вывода выполнен с возможностью по отдельности регулировать скоростные характеристики каждого из двух асинхронных двигателей для обеспечения независимой работы глубинного оборудования с заданным количеством двойных ходов каждого из двух штоков гидроцилиндров. Техническим результатом, достигаемым при осуществлении заявленного изобретения, является увеличение добычи пластовой жидкости за единицу времени без увеличения количества наземного оборудования за счет автоматического управления электрогидравлической аппаратурой. 1 з.п. ф-лы, 2 ил.
1. Система управления гидравлическими приводами двух штанговых глубинных насосов, содержащая программируемый логический контроллер (ПЛК), выполненный с возможностью по отдельности управлять работой гидравлического привода каждого из двух штанговых глубинных насосов, причем ПЛК содержит модуль дискретного ввода, соединенный через дискретные входы с выходами двух датчиков уровня рабочей жидкости в маслобаке гидравлической насосной станции штангового глубинного насоса, модуль аналогового ввода, соединенный через аналоговые входы с аналоговыми выходами двух датчиков температуры, установленных в маслобаке, и аналоговыми выходами двух датчиков давления напорных линий насосной станции, модуль дискретного вывода, соединенный через дискретные выходы с соответствующими входами частотных преобразователей каждого из двух асинхронных двигателей двух напорных линий насосной станции и с двумя промежуточными реле, соединенными с двумя электромагнитами, выполненными с возможностью открывать и закрывать соответствующую напорную линию для каждого из двух гидроцилиндров по отдельности в соответствии с заданным через пульт оператора количеством двойных ходов штоков гидроцилиндров, и модуль аналогового вывода, соединенный через аналоговые выходы с соответствующими входами частотных преобразователей каждого из двух асинхронных двигателей двух напорных линий насосной станции, при этом ПЛК соединен с первым эхолотом и первым расходомером, вторым эхолотом и вторым расходомером, причем ПЛК выполнен с возможностью по отдельности регулировать скоростные характеристики каждого из двух асинхронных двигателей напорных линий насосной станции на основании количества двойных ходов штока гидроцилиндра в минуту, предварительно заданного через пульт оператора раздельно для гидравлического привода каждого из двух штанговых глубинных насосов, и данных об уровне пластовой жидкости в скважинах и объеме поднимаемой пластовой жидкости, полученных раздельно от первого эхолота и первого расходомера и второго эхолота и второго расходомера.
2. Система управления по п.1, в которой ПЛК соединен с первым эхолотом и первым расходомером, вторым эхолотом и вторым расходомером через сетевой интерфейс RS-485 по протоколу Modbus RTU.
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2021 |
|
RU2767669C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2018 |
|
RU2676898C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ДОБЫЧИ НЕФТИ ИЗ ПЛАСТОВ ОДНОЙ СКВАЖИНЫ С ПОГРУЖНОЙ НАСОСНОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344274C1 |
| US 6201996 B1, 13.03.2001. | |||

