Изобретение относится к машиностроению, а именно к системам управления и контроля гидравлических приводов штанговых насосов.
Известна система управления гидравлическим приводом глубинного штангового насоса (патент 90857, публ. 20.01.2010г., бюл. 2). Система управления содержит
силовой блок в составе насоса и двигателя, которые соединены с источником тока через частотный преобразователь. Система управления также содержит управляющий контроллер, первый вход которого соединен посредством аналогового блока ввода с датчиками параметров рабочей среды в полостях гидроцилиндра, второй вход посредством цифрового блока ввода соединен с датчиками положения штока гидроцилиндра, а третий вход соединен с блоком питания. Для подачи питания на электрогидравлические распределители и для включения элементов силового блока первый выход контроллера посредством аналогового блока вывода соединен с частотным преобразователем, а второй выход посредством цифрового блока вывода через блок коммутации соединен с первым входом блока коммутационной и силовой аппаратуры, осуществляющим включение или выключение электродвигателя масляного насоса и ТЭН. Со вторым входом блока коммутационной и силовой аппаратуры соединен блок сетевого питания привода. Для плавного регулирования скорости электродвигателя масляного насоса первый выход блока коммутационной и силовой аппаратуры соединен посредством частотного преобразователя с обмотками двигателя. Выходы блока сетевого питания подсоединены к входам датчиков положения штока гидроцилиндра, к входу блока коммутации, к входу управляющего контроллера. Первый вход управляющего контроллера соединен посредством аналогового блока ввода с датчиком уровня масла в гидросистеме, с датчиком температуры масла в гидросистеме и с датчиками давления в полостях гидроцилиндра. Второй выход блока коммутационной силовой аппаратуры соединен с электродвигателем вентилятора охлаждения масла. Третий выход блока коммутационной и силовой аппаратуры соединен с масляными ТЭН. Выход блока сетевого питания подсоединен к входу блока фазоуказателя, выход которого подсоединен к входу аналогового блока ввода. По меньшей мере, один из выходов блока коммутации соединен с электрогидравлической аппаратурой.
Недостатком системы является отсутствие контроля внешней среды, что не позволяет обеспечить оптимальную технологичность и надежность работы привода глубинного штангового насоса.
Задачей изобретения является расширение потребительских свойств системы с целью повышения эффективности работы глубинного оборудования скважины, с одновременным повышением оптимизации работы привода штангового насоса.
Техническим результатом является обеспечение контроля над подъемом пластовой жидкости из скважины и обеспечение управления гидроприводом штанговращателя в реальном времени.
Технический результат достигается тем, что система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер, дискретные входы которого соединены с выключателем, с выходами датчика положения штанговращателя, с дискретными выходами преобразователя. Коммуникационный порт программируемого логического контроллера соединен со счетчиком электроэнергии, с датчиком потока жидкости, эхолотом. К дискретным выходам программируемого логического контроллера подсоединено промежуточное реле, управляющее электромагнитом, дискретные входы частотного преобразователя, входная силовая шина которого подключена к питающей сети, а его выходная силовая шина подключена к электродвигателю насоса гидравлического привода штангового насоса.
В качестве промежуточного реле, которое взаимодействуют с электромагнитом, используются полупроводниковое реле постоянного тока.
Коммуникационный порт программируемого логического контроллера использует линию связи RS-485 и протокол связи ModbusRTU.
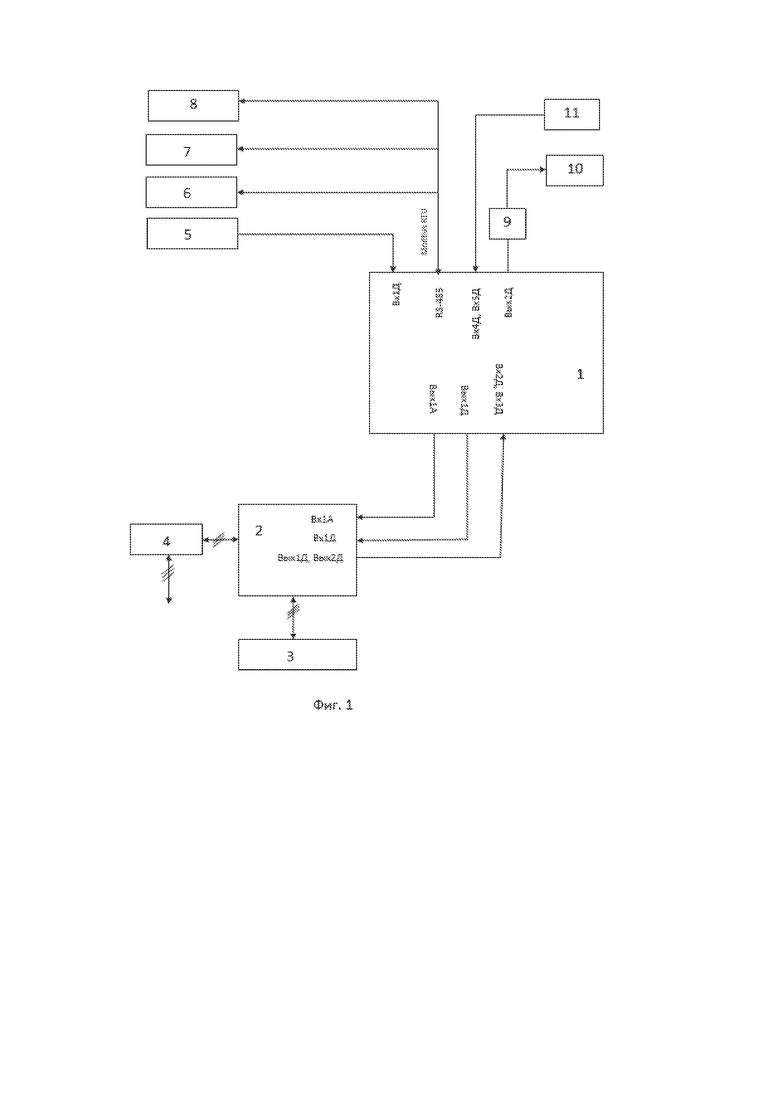
На фиг. 1 представлена функциональная схема системы управления гидравлическим приводом штангового насоса.
Система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер 1 (далее ПЛК), аналоговой и дискретный выходы которого подключены к соответствующим входам частотного преобразователя 2, выходная силовая шина которого подключена к электродвигателю 3 насоса гидравлического привода штангового насоса, а входная силовая шина к рубильнику питающей сети 4. Первый дискретный вход ПЛК подсоединен к выключателю 5, второй и третий дискретные входы ПЛК подключены к первому и второму выходу частотного преобразователя 2. Через коммуникационный порт к ПЛК подключены эхолот 6, датчик потока жидкости 7 и счетчик электроэнергии 8. Второй дискретный выход ПЛК подключен к промежуточному реле 9, соединенному с электромагнитом, управляющим гидроприводом штанговращателя. Четвертый и пятый дискретные входы ПЛК соединены с двумя датчиками положения штанговращателя 11.
ПЛК 1 начинает работу (при нормальных условиях эксплуатации) при подаче на его первый дискретный вход дискретного сигнала от источника постоянного напряжения (на схеме не показан) выключателем «пуск/стоп» 5. Напряжение силовой питающей сети, а также напряжение к источникам питания датчиков и ПЛК (на схеме не показаны) подается через вводной рубильник 4. Датчики положения штанговращателя 11 расположены на опоре гидроцилиндра и предназначены для определения соответствующего положения штанговращателя относительно опоры. Таких датчиков должно быть установлено два, для верхнего и нижнего положения штанговращателя. Срабатывание датчиков штанговращателя 11 подтверждает факт смены направления его движения вниз или вверх соответственно.
Электромагнит 10 предназначен для открытия или закрытия гидравлического клапана (на схеме не показан), который путем открытия/закрытия соответствующей напорной линии, осуществляет управление гидроприводом штанговращателя. Подача и снятие команд на промежуточное реле 9, осуществляется при наличии сигналов о смене направления движения штанговращателя, поступающих от датчиков положения штанговращателя 11. Подача команды на промежуточное реле 9 может осуществляться как при движении штанговращателя вверх или вниз, так и в обоих направлениях, в зависимости от состояния скважины.
Длительность открытия напорной лини (включен электромагнит 10) определяет величину угла поворота штанговращателя. Управление гидроприводом штанговращателя позволяет обеспечить более эффективную очистку насосно-компрессорных труб от асфальто-смоло-парафиновых отложений и, как следствие, снизить энергозатраты на подъем пластовой жидкости. Частотный преобразователь 2, подключен через автоматы токовой защиты (на схеме не показаны). Первый и второй дискретные выходы частотного преобразователя 2 соединены со вторым и третьим дискретными входами ПЛК. Через эти выходы частотный преобразователь передает на входы ПЛК сигналы об ошибках, выявленных при работе частотного преобразователя. Первый аналоговый выход ПЛК соединен с первым аналоговым входом напряжения частотного преобразователя 2, величина сигнала первого аналогового выхода ПЛК задает частоту силового трехфазного электропитания на силовом трехфазном выходе частотного преобразователя 2, подключенного к электродвигателю 3 гидравлического насоса. Первый дискретный выход ПЛК соединен с первым дискретным входом частотного преобразователя 2 и предназначен для старта работы преобразователя частоты. Все датчики, коммуникационные устройства и ПЛК запитаны от источников постоянного тока (на схеме не показаны), которые подключены к питающей сети через автоматы токовой защиты (не схеме не показаны). По результатам сравнения данных об уровне жидкости в скважине, которые поступают от эхолота 7 и данных об объеме поступающей из скважины жидкости, которые поступают от датчика потока жидкости 8, ПЛК, в зависимости от соотношения указанных данных, изменяет параметры сигнала на своем аналоговом выходе 1 при движении штока гидроцилиндра вверх или вниз. Таким образом, система управления изменяет скорость вращения асинхронного двигателя, который управляет движением штока гидроцилиндра привода глубинного штангового насоса. Изменение скорости вращения двигателя изменяет регулируемые параметры (количество двойных ходов штока гидроцилиндра, либо скорость движения штока гидроцилиндра вверх или вниз при сохранении количества двойных ходов), изменением указанных параметров система управления обеспечивает оптимальное заполнение глубинного насоса.
Управление и контроль объемов поднимаемой пластовой жидкости и величины потребляемой электроэнергии на подъем пластовой жидкости позволяет достигнуть оптимального значения коэффициента энергозатрат на кубический метр поднимаемой жидкости, таким образом повысить эффективность работы глубинного оборудования скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическими приводами двух штанговых глубинных насосов | 2023 |
|
RU2806837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2021 |
|
RU2767669C1 |
| ГИДРОПРИВОД НАСОСНОЙ СКВАЖИННОЙ УСТАНОВКИ | 2022 |
|
RU2793863C1 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| Пресс гидравлический для изготовления клееного бруса | 2022 |
|
RU2795614C1 |
| НАСОС БУРОВОЙ ТРЕХПОРШНЕВОЙ ОДНОСТОРОННЕГО ДЕЙСТВИЯ | 2021 |
|
RU2770342C1 |
| Пресс испытательный электрогидравлический | 2023 |
|
RU2818547C1 |
| Автоматизированная система управления пассажирской подвесной канатной дорогой | 2024 |
|
RU2822719C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВАНАДИЕВЫМ ПРОТОЧНЫМ АККУМУЛЯТОРОМ | 2023 |
|
RU2832276C1 |
Изобретение относится к области машиностроения, а именно к системам управления и контроля гидравлических приводов штанговых насосов. Система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер (1), аналоговой и дискретный выходы которого подключены к соответствующим входам частотного преобразователя (2), выходная силовая шина которого подключена к электродвигателю (3) насоса гидравлического привода штангового насоса, а входная силовая шина - к рубильнику питающей сети (4). Первый дискретный вход программируемого логического контроллера (ПЛК) подсоединен к выключателю (5), второй и третий дискретные входы ПЛК подключены к первому и второму выходу частотного преобразователя (2). Через коммуникационный порт к ПЛК подключены эхолот (6), датчик потока жидкости (7) и счетчик электроэнергии (8). Второй дискретный выход ПЛК подключен к промежуточному реле (9), соединенному с электромагнитом, управляющим гидроприводом штанговращателя. Четвертый и пятый дискретные входы ПЛК соединены с двумя датчиками положения штанговращателя (11). Обеспечивается контроль над подъемом пластовой жидкости из скважины и управление гидроприводом штанговращателя в реальном времени. 2 з.п. ф-лы, 1 ил.
1. Система управления гидравлическим приводом штангового насоса, содержащая программируемый логический контроллер, дискретные входы которого соединены с выключателем, с выходами датчика положения штанговращателя, с дискретными выходами преобразователя, при этом коммуникационный порт программируемого логического контроллера соединен со счетчиком электроэнергии, с датчиком потока жидкости и эхолотом, к дискретным выходам программируемого логического контроллера подсоединено промежуточное реле, управляющее электромагнитом, и дискретные входы частотного преобразователя, входная силовая шина которого подключена к питающей сети, а его выходная силовая шина подключена к электродвигателю насоса гидравлического привода штангового насоса.
2. Система управления гидравлическим приводом штангового насоса по п.1, отличающаяся тем, что в качестве реле, которые взаимодействуют с электромагнитами, используются полупроводниковые реле постоянного тока.
3. Система управления гидравлическим приводом штангового насоса по п.1, отличающаяся тем, что коммуникационный порт программируемого логического контроллера использует линию связи RS-485 и протокол связи ModbusRTU.
| Штамп для правки гвоздей | 1949 |
|
SU90857A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| Катализатор полимеризации диолефинов | 1959 |
|
SU126061A1 |

