Изобретение относится к машиностроению, а именно к системам управления и контроля гидравлических приводов штанговых насосов.
Существует система управления, которая содержит силовой блок в составе насоса и двигателя (патент RU 2676898, опубл. 11.01.2019). Система управления также содержит управляющий контроллер. Для плавного регулирования скорости электродвигателя масляного насоса первый выход блока коммутационной и силовой аппаратуры соединен посредством частотного преобразователя с обмотками двигателя. Выходы блока сетевого питания подсоединены к входам датчиков положения штока гидроцилиндра, к входу блока коммутации, к входу управляющего контроллера. Выходы блока коммутации соединены с электрогидравлической аппаратурой.
Недостатком системы является узкий диапазон управления характеристиками гидравлической аппаратуры и отсутствием дублирования основных элементов системы, что не позволяет обеспечить оптимальную технологичность и надежность работы привода глубинного штангового насоса.
Задачей изобретения является расширение потребительских свойств системы с целью повышения эффективности работы глубинного оборудования, и повышением надежности работы привода штангового насоса.
Техническим результатом является обеспечение автоматического увеличения диапазона регулирования параметров работы штангового глубинного насоса и обеспечение безопасности работы гидравлического привода штангового скважинного насоса за счет автоматического управления резервированием электрогидравлической аппаратуры.
Технический результат достигается тем, что система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер, подключенный через дискретные выходы по меньшей мере к двум промежуточным реле, соединенным с по меньшей мере двумя электромагнитами, дискретные входы программируемого логического контроллера соединены с выходами по меньшей мере двух датчиков уровня рабочей жидкости (например, масла) в гидравлическом баке (гидробаке), аналоговые входы программируемого логического контроллера соединены с аналоговыми выходами по меньшей мере двух датчиков температуры и по меньшей мере двух датчиков давления. В программируемый логический контроллер через дискретные и аналоговые входы поступают сигналы о неисправности упомянутых датчиков, на основании этих сигналов происходит переключение на соответствующий резервный датчик. Соответствующие дискретные и аналоговые выходы программируемого логического контроллера соединены с соответствующими входами двух преобразователей частоты каждого из двух асинхронных электродвигателей, соединенных, в свою очередь, с соответствующими гидромоторами напорных линий насосной станции. На основании настроек оператора или при обнаружении неисправности электрогидравлической аппаратуры одной из напорных линий, программируемый логический контроллер через дискретные и аналоговые выходы регулирует частоту асинхронных электродвигателей и управляет их включением или отключением для обеспечения работы глубинного оборудования с заданным количеством двойных ходов штока гидроцилиндра.
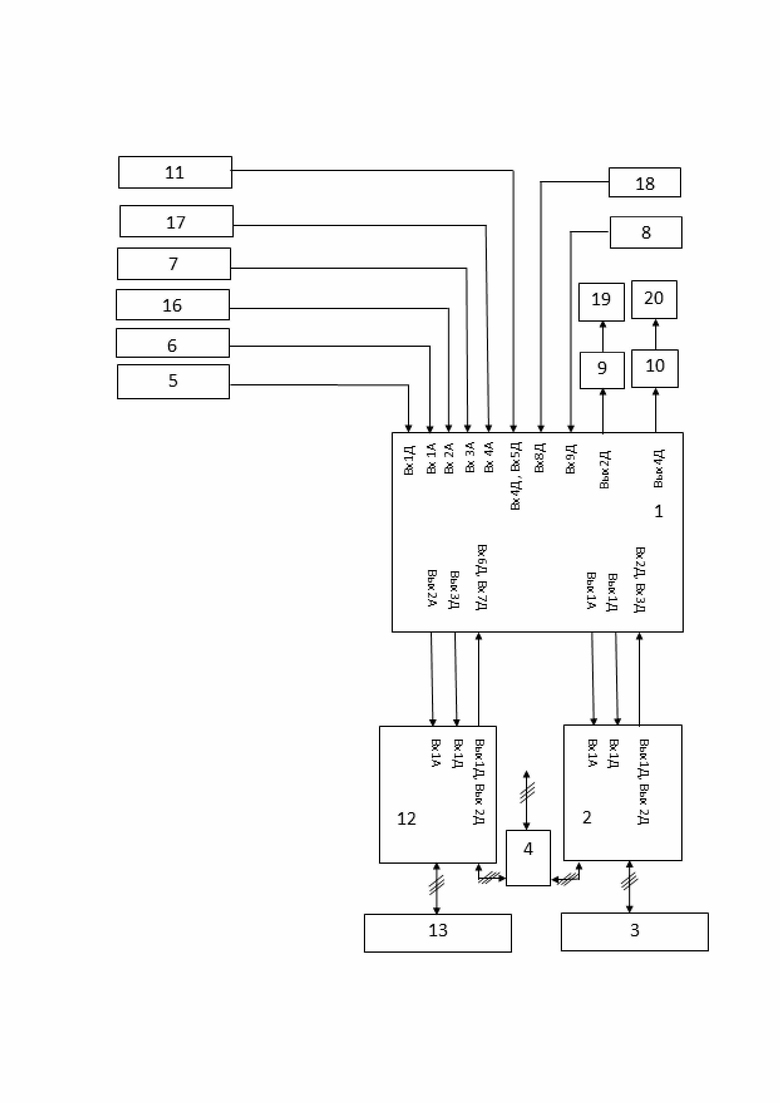
На фигуре представлена функциональная схема системы управления гидравлическим приводом штангового насоса.
Система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер 1 (далее ПЛК), аналоговой и дискретный выходы (Вых) которого подключены к соответствующим входам (Вх) частотных преобразователей 2 и 12, выходная силовая шина которых подключена к соответствующим электродвигателям 3 и 13 гидромоторов гидравлического привода штангового насоса, а входная силовая шина к рубильнику 4 питающей сети. Первый дискретный вход ПЛК подсоединен к выключателю 5, второй и третий дискретные входы ПЛК подключены к первому и второму выходу частотного преобразователя 2, а шестой и седьмой дискретные входы ПЛК подключены к первому и второму выходу частотного преобразователя 12. Второй и четвертый дискретные выходы ПЛК подключены к промежуточным реле 9 и 10, соединенным с электромагнитами 19 и 20 соответственно, управляющими распределителями напорных линий (на рисунке не показаны). Первый и второй аналоговые входы ПЛК подключены к датчикам давления 6 и 16, которые установлены в первой и второй напорных линиях соответственно. Третий и четвертый аналоговые входы ПЛК подключены к датчикам температуры 7 и 17, которые установлены в гидробаке и предназначены для контроля температуры рабочей жидкости. Восьмой и девятый дискретные входы ПЛК подключены к первому 8 и второму 18 датчикам уровня рабочей жидкости в гидробаке. Четвертый и пятый дискретные входы ПЛК соединены с двумя датчиками положения штанговращателя 11.
ПЛК 1 начинает работу (при нормальных условиях эксплуатации) при подаче на его первый дискретный вход дискретного сигнала от источника постоянного напряжения (на схеме не показан) выключателем «Пуск/Стоп» 5. Напряжение силовой питающей сети, а также напряжение к источникам питания датчиков и ПЛК (на схеме не показаны), подается через рубильник 4 питающей сети. Датчики положения штанговращателя 11 расположены на опоре гидроцилиндра и предназначены для определения соответствующего положения штанговращателя относительно опоры. Устанавливается по меньшей мере два датчика положения: для верхнего и нижнего положения штанговращателя. Срабатывание датчиков штанговращателя 11 подтверждает факт смены направления его движения вниз или вверх соответственно.
Электромагниты 19 и 20 настроены на установку гидрораспределителей для работы по объединению двух напорных линий в одну. ПЛК контролирует состояние датчиков давления 6, температуры 7 и уровня рабочей жидкости 8 в гидробаке, при обнаружении неисправности любого из перечисленных датчиков ПЛК переходит на работу с соответствующими резервными датчиками 16, 17, 18.
При начале работы ПЛК 1 работает через частотный преобразователь 2, силовая шина которого подключена через автомат токовой защиты (на схеме не показан) к рубильнику 4 питающей сети. Первый и второй дискретные выходы частотного преобразователя 2 соединены со вторым и третьим дискретными входами ПЛК. Через эти выходы частотный преобразователь 2 передает на входы ПЛК сигналы об ошибках, выявленных при работе частотного преобразователя 2. ПЛК 1 через первый аналоговый выход, который соединен с первым аналоговым входом частотного преобразователя 2, путем изменения задаваемой частоты асинхронного электродвигателя 3 пытается выйти на заданные скоростные параметры движения гидроцилиндра. При отсутствии достижения требуемых скоростных параметров движения гидроцилиндра ПЛК 1 через третий дискретный выход и второй аналоговый выход, которые подключены соответственно к первому дискретному входу и первому аналоговому входу частотного преобразователя 12, силовая шина которого подключена через автомат токовой защиты (на схеме не показан) к рубильнику 4 питающей сети, путем изменения задаваемой частоты асинхронного электродвигателя 13 увеличивает скоростные параметры движения гидроцилиндра. В это время работают оба частотных преобразователя. Первый и второй дискретные выходы частотного преобразователя 12 соединены с шестым и седьмым дискретными входами ПЛК. Через эти выходы частотный преобразователь 12 передает на входы ПЛК сигналы об ошибках, выявленных при работе частотного преобразователя 12. При обнаружении ошибок частотных преобразователей 2 или 12 ПЛК отключает от работы неисправный частотный преобразователь и продолжает работу на одном частотном преобразователе, сохраняя работоспособность всего комплекса оборудования на меньших скоростях движения гидроцилиндра.
Таким образом, система управления изменяет скорость вращения асинхронных электродвигателей, которые управляют движением штока гидроцилиндра привода глубинного штангового насоса, что ведет к увеличению объемов подъема пластовой жидкости, увеличению диапазона регулирования параметров работы штангового глубинного насоса и увеличению надежности работы системы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическими приводами двух штанговых глубинных насосов | 2023 |
|
RU2806837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2018 |
|
RU2676898C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| Пресс испытательный электрогидравлический | 2023 |
|
RU2818547C1 |
| ГИДРОПРИВОД НАСОСНОЙ СКВАЖИННОЙ УСТАНОВКИ | 2022 |
|
RU2793863C1 |
| Пресс гидравлический для изготовления клееного бруса | 2022 |
|
RU2795614C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| НАСОС БУРОВОЙ ТРЕХПОРШНЕВОЙ ОДНОСТОРОННЕГО ДЕЙСТВИЯ | 2021 |
|
RU2770342C1 |
Изобретение относится к машиностроению, а именно к системам управления и контроля гидравлических приводов штанговых насосов управления резервированием электрогидравлической аппаратуры. Система управления гидравлическим приводом штангового насоса содержит программируемый логический контроллер, подключенный через дискретные выходы по меньшей мере к двум промежуточным реле, соединенным с по меньшей мере двумя электромагнитами, дискретные входы программируемого логического контроллера соединены с выходами по меньшей мере двух датчиков уровня рабочей жидкости (например, масла) в гидравлическом баке (гидробаке), аналоговые входы программируемого логического контроллера соединены с аналоговыми выходами по меньшей мере двух датчиков температуры и по меньшей мере двух датчиков давления. В программируемый логический контроллер через дискретные и аналоговые входы поступают сигналы о неисправности упомянутых датчиков, на основании этих сигналов происходит переключение на соответствующий резервный датчик. Соответствующие дискретные и аналоговые выходы программируемого логического контроллера соединены с соответствующими входами двух преобразователей частоты каждого из двух асинхронных электродвигателей, соединенных, в свою очередь, с соответствующими гидромоторами напорных линий насосной станции. На основании настроек оператора или при обнаружении неисправности электрогидравлической аппаратуры одной из напорных линий программируемый логический контроллер через дискретные и аналоговые выходы регулирует частоту асинхронных электродвигателей и управляет их включением или отключением для обеспечения работы глубинного оборудования с заданным количеством двойных ходов штока гидроцилиндра. Техническим результатом является обеспечение автоматического увеличения диапазона регулирования параметров работы штангового глубинного насоса и обеспечение безопасности работы гидравлического привода штангового скважинного насоса за счет автоматического. 1 ил.
Система управления гидравлическим приводом штангового насоса, содержащая программируемый логический контроллер, подключенный через дискретные выходы по меньшей мере к двум промежуточным реле, соединенным по меньшей мере с двумя электромагнитами, дискретные входы программируемого логического контроллера соединены с выходами по меньшей мере двух датчиков уровня рабочей жидкости в гидравлическом баке, аналоговые входы соединены с аналоговыми выходами по меньшей мере двух датчиков температуры и по меньшей мере двух датчиков давления, программируемый логический контроллер выполнен с возможностью приема через дискретные и аналоговые входы сигналов о неисправности упомянутых датчиков, на основании упомянутых сигналов происходит переключение на соответствующий резервный датчик, соответствующие дискретные и аналоговые выходы программируемого логического контроллера соединены с соответствующими входами двух преобразователей частоты каждого из двух асинхронных электродвигателей, соединенных, в свою очередь, с соответствующими гидромоторами напорных линий насосной станции, на основании настроек оператора или при обнаружении неисправности электрогидравлической аппаратуры одной из напорных линий, программируемый логический контроллер выполнен с возможностью через дискретные и аналоговые выходы регулировать частоту асинхронных электродвигателей и управлять их включением или отключением для повышения надежности работы привода и обеспечения работы глубинного оборудования с заданным количеством двойных ходов штока гидроцилиндра.
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2018 |
|
RU2676898C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ШТАНГОВОГО НАСОСА | 2016 |
|
RU2646934C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| US 6201996 B1, 13.03.2001. | |||

