Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения.
Известны роботизированные установки пожаротушения, например, устройство попатенту РФ №2751690. Недостатком данного устройства является быстрое изменение рабочего давления в гидроаккумуляторах при работе пожарных роботов с полным расходом, что уменьшает время подачи огнетушащего вещества, и только частичное использование емкости гидроаккумулятора, что повышает весогабаритные показатели.
Наиболее близким по технической сути является “Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия», патент РФ №2785398, содержащая два и более пожарных робота (ПР), подключенных к противопожарному водопроводу, включающих в себя ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор с приводом и местный пульт управления, соединенные с блоком коммутации, входящим в блок управления ПР, устройство обнаружения загорания, устройство цифровой обработки сигнала в ИК-диапазоне, устройство управления, систему пожарной сигнализации с приемно-контрольным устройством, соединенным с пожарными извещателями, водопитатель, включающий в себя обратные клапаны, установленные между водопроводной сетью и противопожарным водопроводом, гидроаккумулятор с датчиком давления на противопожарном водопроводе, баллон со сжатым воздухом, подключенные через перекрывной электроклапан к воздушному отсеку гидроаккумулятора, который через выпускной электроклапан связан с атмосферой, при этом перекрывной и выпускной электроклапаны соединены с блоком управления водопитателя, который соединен с реле давления и с устройством управления.
Недостатком данного устройства является использование насосной станции для пополнения гидроаккумулятора, усложняющим устройство, делающим его энергоемким, определение наполненности гидроаккумулятора производится по расчетному времени, что при изменениях напора в сети не позволяет провести заправку в полном объеме, а также применяется сложная система определения координат и площади очага возгорания, связанная с необходимостью оцифровки местоположения ПР в трехмерной системе координат с использованием большого математического аппарата для производства расчетов для каждой наблюдательной точки.
В основу изобретения поставлена задача создания роботизированной установки пожаротушения модульного типа повторно-кратковременного действия (РУП) без подпиточных насосов, со значительным снижением энергоемкости, позволяющим работать на низком напряжения постоянного тока с резервированием от аккумуляторных батарей, с заполнением гидроаккумулятора водой по данным о его фактическом наполнении, с упрощенной системой определения координат загорания и пожаротушения непосредственно системой управления ПР с наделением одного из ПР функциями группового управления ПР.
Это достигается тем, что в устройстве приняты технические решения:
- дополнительно введено реле давления воздуха, установленное на входе выпускного электроклапана, связанного с атмосферой, соединенного с блоком управления водопитателя;
- электроаккумулятор с зарядным устройством и сетью электропитания на пониженном напряжении ко всем компонентам устройства, потребляющим электроэнергию;
- блок управления ПР выполнен с автономной системой управления ПР, включающей введенное в него устройство цифровой обработки сигнала в ИК-диапазоне, соединенное с устройством обнаружения загорания, и соединенные с ним дополнительно введенные блок расчета дальности и соединенные между собой блок расчета угла наведения и блок программного пожаротушения, который соединен с блоком коммутации, при этом в устройство дополнительно введен блок выбора ПР, соединенный с блоком расчета дальности и с устройством управления;
- один из ПР выполнен с системой управления группой ПР, включающей введенное в блок управления ПР устройство управления с соединенным с ним сетевым контроллером и дополнительно введенными блоком выбора ПР и блоком контроля неисправностей, при этом устройство управления соединено с приемно-контрольным устройством и блоком управления водопитателем, сетевой контроллер соединен с блоками коммутации ПР, а блок выбора ПР соединен с блоками расчета дальности.
Предложенное техническое решение позволит:
- осуществлять наполнение гидроаккумулятора непосредственно от водопроводной сети без насосов, что значительно снижает энергоемкость и делает возможным переход на аккумуляторное электропитание и на более низкую категорию электроснабжения с возможностью перерыва в электроснабжении, что значительно снижает затраты на оборудование и расширяет область применения устройства;
- стабилизировать давление в гидроаккумуляторе за счет подкачки сжатым воздухом до полного выхода из него воды и контролировать его фактическое наполнение по срабатыванию реле давления воздуха, что оптимизирует использование емкости гидроаккумулятора;
- значительно упростить систему управления за счет определения координат загорания и пожаротушения непосредственно системой управления ПР и наделения одного из ПР функциями группового управления ПР, что значительно снижает затраты на оборудование, уменьшает линии связи и облегчает пуско-наладочные работы на объекте применения;
- исключить опасное воздействие на людей инертных газов;
- повысить надежность устройства за счет введения ПР с автономной системой управления и ее 100% резервирования.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию “существенные отличия”.
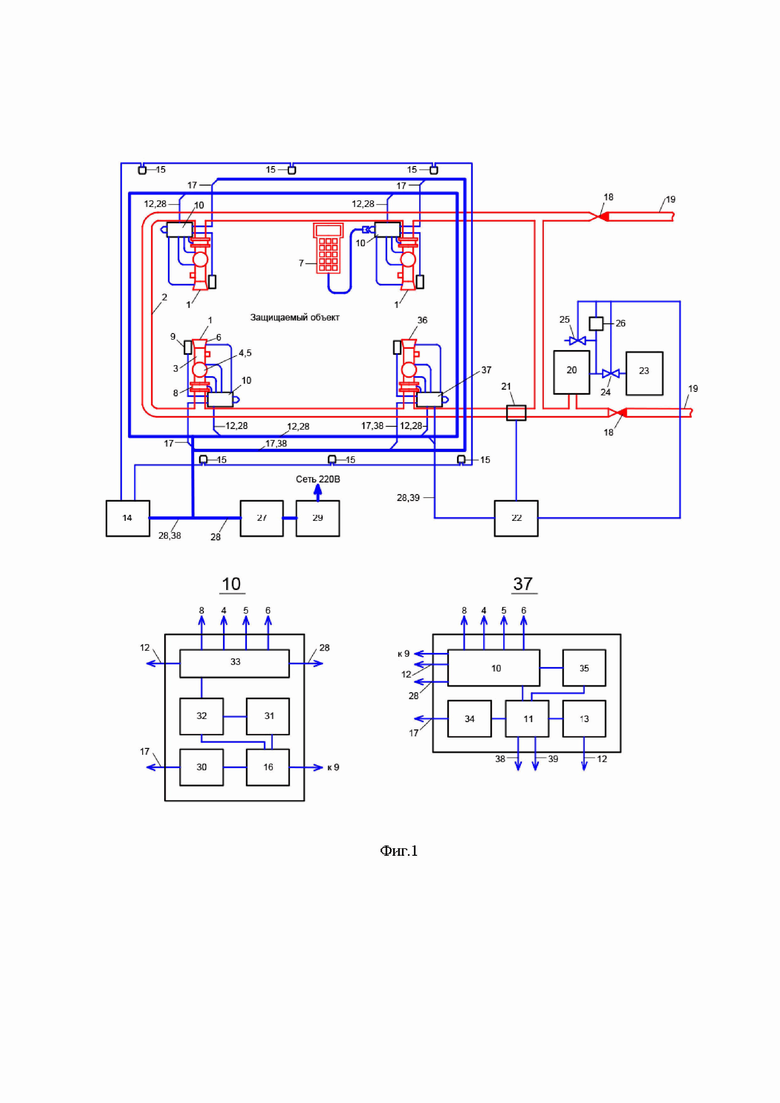
На фиг. 1 представлена функциональная схема РУП.
Устройство содержит, см. фиг. 1, пожарные роботы (ПР) 1, см., например патент РФ №2699849 «Пожарный мини-робот в потолочном исполнении», объединенные в РУП, установленные на противопожарном водопроводе 2. ПР 1 включает в себя ствол 3 с приводами вертикального и горизонтального наведения 4,5, насадок с приводом изменения угла распыливания струи 6, переносной пульт управления 7, установленный на вводе дисковый затвор с приводом 8, установленное на стволе 3 устройство обнаружения загорания 9, соединенные с блоком управления пожарным роботом 10, включающим в себя блок коммутации 33. В РУП входит устройство управления 11, соединенное с блоком управления 10 по каналу связи 12, например RS-485, через сетевой контроллер 13, система пожарной сигнализации с приемно-контрольным устройством 14 и пожарными извещателями 15. Водопитатель включает в себя обратные клапаны 18, установленные между водопроводной сетью 19 и противопожарным водопроводом 2, и гидроаккумулятор 20 с датчиком давления 21, установленные на противопожарным водопроводе 2. Блок управления водопитателя 22 соединен с датчиком давления 21 и с устройством управления 11 по линии связи 39. Баллон со сжатым воздухом 23 подключен через перекрывной электроклапан 24 к воздушному отсеку гидроаккумулятора 20, который через выпускной электроклапан 25 с реле давления воздуха 26 связан с атмосферой, при этом перекрывной и выпускной электроклапаны 24, 25 и реле давления воздуха 26 соединены с блоком управления водопитателем 22. Электропитание всех устройств на пониженном напряжении осуществляется от электроаккумулятора 27 по сети электропитания 28. Электроаккумулятор 27 подключен через зарядное устройство 29 к сети электропитания объекта 28 в буферном режиме. Потери напряжения в сети электропитания объекта 28 компенсируются применением повышающих DC-DC преобразователей в составе блока управления пожарным роботом 10. Блок управления ПР 10 выполнен с автономной системой управления, включающей введенное в него устройство цифровой обработки сигнала в ИК-диапазоне 16, соединенное с устройством обнаружения загорания 9 и соединенные с ним блок расчета дальности 30 и соединенные между собой блок расчета угла наведения 31 и блок программного пожаротушения 32, который соединен с блоком коммутации 33. Аппаратно функции блока управления ПР могут быть выполнены с использованием известных контроллеров с устройствами ввода-вывода в необходимом количестве. В устройство дополнительно введены блок выбора ПР 34 и блок контроля неисправностей 35, соединенные с устройством управления 11, при этом блок контроля неисправностей 35 соединен с блоком расчета дальности 30 по каналу связи 17. Аппаратно функции системы управления РУП, включающей в себя устройство управления 11, сетевой контроллер 13, блок выбора ПР 34 и блок контроля неисправностей 35 могут выполняться на базе одного из контроллеров пожарных роботов, который в этом случае будет являться мастер-контроллером. Сам пожарный робот, с функциями контроля и управления группой ПР в условиях пожара, по аналогии с принятой организацией действий на месте тушения пожара руководителем тушения пожара - РТП, будет иметь аббревиатуру ПР-РТП 36. Блок управления ПР-РТП 37 включает в себя также собственный блок управления ПР 10, при этом устройство управления 11 соединено по линии связи 38 с приемно-контрольным устройством 14 и по линии связи 39 с блоком управления водопитателем 22, сетевой контроллер 13 соединен с блоками коммутации ПР по каналу связи 12, а блок выбора ПР 34 соединен по каналу связи 17 с блоками расчета дальности 30 блоков управления ПР. Расстановка ПР 1 на защищаемом объекте выполняется попарно: один из ПР 1 рабочий, 2-й - резервный, при этом каждая точка защищаемой зоны находится в пределах досягаемости двух струй.
Устройство работает следующим образом. В дежурном режиме защищаемый объект находится под постоянным контролем пожарных извещателей 15. Гидроаккумулятор 20 полностью заполнен и находится под давлением на верхнем уровне рабочего диапазона, контролируемого датчиком давления 21. При возникновении пожара извещатели 15 срабатывают и приемно-контрольное устройство 14 выдает сигнал «Тревога» по линии связи 38 на ПР-РТП 36, обеспечивающим управление группой ПР 1. Сигнал поступает непосредственно на устройство управления 11 блока управления ПР-РТП 37, которое выдает управляющие сигналы по каналу связи 12 на блоки управления 10 всех ПР 1, защищающих данное помещение. Приводами вертикального и горизонтального наведения 4 и 5 стволы 3 ПР 1, ПР-РТП 36 производят круговой обзор по поиску очага возгорания в защищаемом помещении. От устройств обнаружения загорания 9 ПР данные о загорании поступают на устройства цифровой обработки 16, где производится идентификация загорания, определение угловых координат а и b очага возгорания в вертикальной и горизонтальной плоскости, соответственно, о размерах очага возгорания da и db. Информация об угловых координатах очага возгорания а поступает в блоки расчета дальности 30, где в зависимости от высоты установки ПР - h производится определение дальности до очага R: R=h×tga. Эта информация по каналу связи 17 поступает в блок выбора ПР 34 блока управления ПР-РТП 37, который определяет, какой из ПР ближе к очагу возгорания, и использует его в качестве рабочего, а 2-й в паре с ним - в качестве резервного. Эти данные направляются в устройство управления 11, которое по каналу связи 12 передает управляющую команду на пожаротушение соответствующему ПР. Информация от устройства цифровой обработки 16 об угловых координатах очага возгорания ао поступает на блок расчета угла наведения 31, который по данным о высоте установки ПР 1 h и давления в противопожарном водопроводе 2 от датчика давления 21, по хранящейся в базе данных информации, определяет угол возвышения dao, обеспечивающий попадание струи на очаг возгорания по баллистической траектории. При этом угол наведения ПР: ан=ао+dao и информация об этом поступает в блок программного пожаротушения 32, в который также поступает информация о размерах очага возгорания da и db. Приводами вертикального и горизонтального наведения 4,5 стволы 3 наводятся на очаг загорания, после чего устройство управления 12 подает команду «запуск» и посылает технологические команды на блок коммутации 33, на открытие дисковых затворов 8 на подачу воды и на отработку программ пожаротушения. Одновременно с этим по линии связи 39 подается команда на блок управления 22 на включение в работу водопитателя, при этом открывается перекрывной электроклапан 24, который подключает баллоны со сжатым воздухом 23 к воздушному отсеку гидроаккумулятора 20 и стабилизирует давление в сети противопожарного водопровода 2, поддерживая давление в рабочем диапазоне. Пожаротушение производится строчными струями по защищаемой площади. Наведение стволов на очаг загорания контролируется по баллистическим данным струи в зависимости от угла наклона и давления по данным датчика давления 21. При выходе из строя рабочего ПР блоком управления 10 формируется сигнал о неисправности, передаваемый по каналу связи 12 в устройство управления 11, который транслирует этот сигнал в приемно-контрольное устройство 14 и в блок контроля неисправности блока управления ПР-РТП 37, который формирует команду на включение резервного ПР в устройство управления 11. Устройство управления 11 направляет команды на соответствующие блоки управления 10 на отключение рабочего ПР и на включение резервного ПР. Дисковый затвор на рабочем ПР закрывается, а на резервном открывается, и резервный ПР включается в работу. При опустошении емкости гидроаккумулятора 20 и уменьшении давления менее нижнего предела рабочего диапазона по данным датчика давления 21 блок управления водопитателем 22 формирует команды на закрытие перекрывного электроклапана 24, на открытие выпускного электроклапана 25, на закрытие дисковых затворов 8 и направляет управляющий сигнал в устройство управления 12 ПР-РТП 37, которое формирует команду на прекращение тушения и на включение РУП в режим мониторинга для контроля за пожарной ситуацией. Водопитатель приводится в исходное состояние, при этом вода подается под давлением водопроводной сети 19 в гидроаккумулятор 20 до его полного наполнения. В этом случае давление выходящего воздуха из гидроаккумулятора 20 снижается до атмосферного, срабатывает реле давления воздуха 26 и подает сигнал в блок управления водопитателем 22 о заполнении бака. Блок управления 22 перекрывает выпускной электроклапан 25 и открывает перекрывной электроклапан 24. Сжатый воздух от баллона 23 поступает в гидроаккумулятор 20 и повышает давление до верхней границы рабочего диапазона давлений, при котором срабатывает датчик давления 21, и блок управления 22 закрывает перекрывной клапан 24. Гидроаккумулятор 20 готов для тушения. При повторном обнаружении загорания устройство работает аналогично описанному выше. В таком повторно-кратковременном режиме РУП работает все время, отведенное для подачи воды, в соответствии с нормативным временем продолжительности подачи.
Предложенная роботизированная установка пожаротушения является эффективным и экономичным автоматическим средством борьбы с пожарами, позволяющим направить весь расход огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, тушить пожар в течение короткого расчетного времени и производить повторное тушение при появлении возгорания в течение установленного времени.
В отличие от известных, по предложенному техническому решению осуществляется подача воды в гидроаккумулятор непосредственно из водопроводной сети без дополнительных насосов, с использованием полной емкости гидроаккумулятора по упрощенной системе управления.
Эти отличительные особенности устройства позволяют значительно снизить затраты на оборудование, упростить монтажно-наладочные работы, повысить эффективность использования рабочей емкости гидроаккумулятора, перейти на более низкую категорию электроснабжения с возможностью перерыва в электроснабжении.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОДУЛЬНОГО ТИПА ПОВТОРНО-КРАТКОВРЕМЕННОГО ДЕЙСТВИЯ | 2022 |
|
RU2785398C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| Роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения | 2020 |
|
RU2739820C1 |
| Роботизированная установка пожаротушения | 2021 |
|
RU2760650C1 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С АЗОТНО-ВОДЯНЫМ ПОЖАРОТУШЕНИЕМ | 2010 |
|
RU2426603C1 |
| Роботизированная установка пожаротушения контейнерная для автоматизированных складов | 2020 |
|
RU2739816C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ КОРРЕКЦИИ СТРУИ | 2020 |
|
RU2745641C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ БЛИЦ-МОНИТОРИНГА | 2020 |
|
RU2739390C1 |
Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия относится к роботизированным установкам пожаротушения. В устройство дополнительно введено реле давления воздуха, установленное на входе выпускного электроклапана, связанного с атмосферой, соединенного с блоком управления водопитателя; электроаккумулятор с зарядным устройством и сетью электропитания на пониженном напряжении ко всем компонентам устройства, потребляющим электроэнергию; блок управления ПР выполнен с автономной системой управления ПР, включающей введенное в него устройство цифровой обработки сигнала в ИК-диапазоне, соединенное с устройством обнаружения загорания, и соединенные с ним дополнительно введенные блок расчета дальности и соединенные между собой блок расчета угла наведения и блок программного пожаротушения, который соединен с блоком коммутации, при этом в устройство дополнительно введен блок выбора ПР, соединенный с блоком расчета дальности и с устройством управления; один из ПР выполнен с системой управления группой ПР, включающей введенное в блок управления ПР устройство управления с соединенным с ним сетевым контроллером и дополнительно введенными блоком выбора ПР и блоком контроля неисправностей, при этом устройство управления соединено с приемно-контрольным устройством и блоком управления водопитателем, сетевой контроллер соединен с блоками коммутации ПР, а блок выбора ПР соединен с блоками расчета дальности. Обеспечивается снижение затрат на оборудование и расширение области применения устройства; стабилизация давления в гидроаккумуляторе за счет подкачки сжатым воздухом до полного выхода из него воды и контроль его фактического наполнения по срабатыванию реле давления воздуха, что оптимизирует использование емкости гидроаккумулятора. 3 з.п. ф-лы, 1 ил.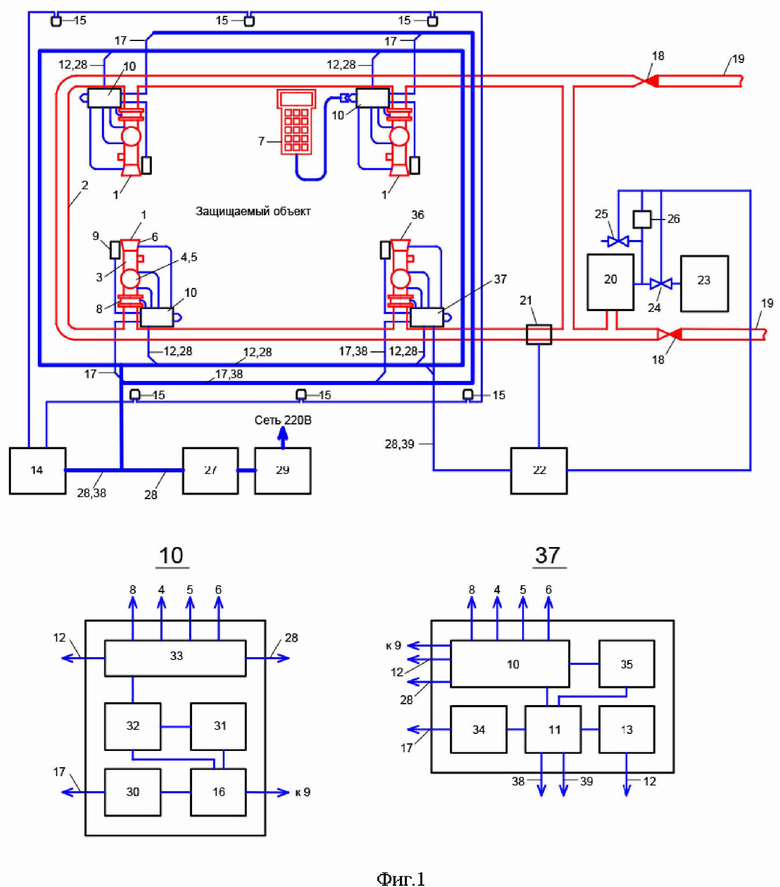
1. Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия (РУП), содержащая местный пульт управления, два и более пожарных робота (ПР), подключенных к противопожарному водопроводу, каждый из которых включает в себя ствол с приводами вертикального и горизонтального наведения, насадки с приводом изменения угла распыливания струи, дисковый затвор с приводом, установленное на стволе устройство обнаружения загорания, которые соединены с блоком коммутации, входящим в блок управления ПР, которое включает в себя устройство цифровой обработки сигнала в ИК-диапазоне, РУП также содержит устройство управления, соединенное с блоком управления ПР, систему пожарной сигнализации с приемно-контрольным устройством, соединенным с пожарными извещателями, также содержит водопитатель, включающий в себя обратные клапаны, установленные между водопроводной сетью и противопожарным водопроводом, гидроаккумулятор с датчиком давления на противопожарном водопроводе, баллон со сжатым воздухом, подключенный через перекрывной электроклапан к воздушному отсеку гидроаккумулятора, который через выпускной электроклапан связан с атмосферой, при этом перекрывной и выпускной электроклапаны соединены с блоком управления водопитателя, который соединен с реле давления и с устройством управления, отличающаяся тем, что РУП содержит реле давления воздуха, установленное на вводном патрубке к воздушному отсеку гидроаккумулятора, связанного с атмосферой, соединенного с блоком управления водопитателя.
2. Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия по п.1, отличающаяся тем, что в устройство дополнительно введены электроаккумулятор с зарядным устройством и сетью электропитания на пониженном напряжении ко всем компонентам устройства, потребляющим электроэнергию.
3. Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия по пп.1, 2, отличающаяся тем, что блок управления ПР выполнен с автономной системой управления, включающей введенное в него устройство цифровой обработки сигнала в ИК-диапазоне, соединенное с устройством обнаружения загорания, и соединенные с ним дополнительно введенные блок расчета дальности и соединенные между собой блок расчета угла наведения и блок программного пожаротушения, который соединен с блоком коммутации, при этом в устройство дополнительно введен блок выбора ПР, соединенный с блоком расчета дальности и с устройством управления.
4. Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия по пп.1, 2, 3, отличающаяся тем, что один из ПР выполнен с системой управления группой ПР, включающей введенное в блок управления ПР устройство управления с соединенным с ним сетевым контроллером и дополнительно введенными блоком выбора ПР и блоком контроля неисправностей, при этом устройство управления соединено с приемно-контрольным устройством и блоком управления водопитателем, сетевой контроллер соединен с блоками коммутации ПР, а блок выбора ПР соединен с блоками расчета дальности.
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОДУЛЬНОГО ТИПА ПОВТОРНО-КРАТКОВРЕМЕННОГО ДЕЙСТВИЯ | 2022 |
|
RU2785398C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ И АВТОМАТИЧЕСКАЯ СИСТЕМА ПОЖАРОТУШЕНИЯ | 1993 |
|
RU2046613C1 |
| RU 93284 U1, 27.04.2010 | |||
| CN 103908756 A, 09.07.2014 | |||
| CN 102631759 A, 15.08.2012. | |||

