Изобретение относится к нефтегазодобывающий промышленности, в частности к области насосной техники, преимущественно к установкам для добычи газа.
Применение: добыча газа.
Состав устройства: устройство создания давления, насосы выкачки, установленные в герметичном корпусе, выдвижную систему фиксации, систему складывания труб, вращательный механизм лопастей бурения, лопасти бурения, систему развертывания лопастей, блок управления, узел контроля и исправности систем, механический фиксатор, а так же трубы, приемопередатчик, заземление, пульт управления.
Прототипом предлагаемого изобретения является способ бурения с контролем режима работы гидравлического забойного двигателя в забойных условиях, включающий замеры показаний давления в нагнетательной линии под нагрузкой и без нагрузки на долото, поддержание постоянной разницы замеренных показаний давлений, определение максимально допустимой величины скорости подачи, осуществление замеров скорости подачи долота и снижение ее до допустимых значений (1).
Недостатком прототипа является способ контроля работы гидравлического забойного двигателя недостаточно эффективен, учитывает в процессе бурения ограниченное количество рабочих параметров буровой установки и не обеспечивает в процессе бурения корректировки траектории ствола скважины.
Ссылка на источник:
1. RU 2508447 C1, Е21В 44/00, Е21В 4/02
Прототипом предлагаемого изобретения является устройство подачи бурового инструмента, реализующее способ бурения с автоматическим регулированием подачи бурового инструмента, основанный на поддержании постоянства крутящего момента на долоте и уменьшении колебаний низа бурильной колонны за счет контролируемого давления в манифольдной линии (1). Указанный способ не ограничивает скорость подачи бурового инструмента, что является причиной преждевременного износа долота из-за его ударов о забой и перегруза при резкой смене разных по твердости горных пород. Превышение скорости бурения над скоростью восходящего потока бурового раствора часто приводит к закупорке кольцевого пространства выбуренными частицами породы.
Недостатком способа является и то, что им не производится корректировка траектории скважины.
Ссылка на источник:
1. RU 2013531 C1, E21B 44/00,
Прототипом предлагаемого изобретения является способ бурения с автоматическим регулированием подачи бурового инструмента в процессе бурения (1), включающим замер величины давления промывочной жидкости в манифольдной линии, сравнение ее с заданной и максимально допустимой величинами и управление исполнительным механизмом подачи бурового инструмента в зависимости от результатов сравнения, осуществление замеров дополнительных рабочих параметров бурения, параметров холостого хода, увеличение или уменьшение скорости подачи бурового инструмента.
Недостатками данного способа бурения являются низкая надежность, связанная с необходимостью сбора информации с большого количества датчиков, высокая трудоемкость настройки. Способ также не предусматривает бурения наклонных скважин с корректировкой их траектории.
Ссылка на источник:
1. RU 2681325 C1, Е21В 44/02
Преимущества предлагаемого устройства в сравнении с аналогом является:
1. Возможность работы прибора для выкачивания газа из под земли автоматически, при подаче команды, не требуя участия человека.
Сущность изобретения отражает чертеж:
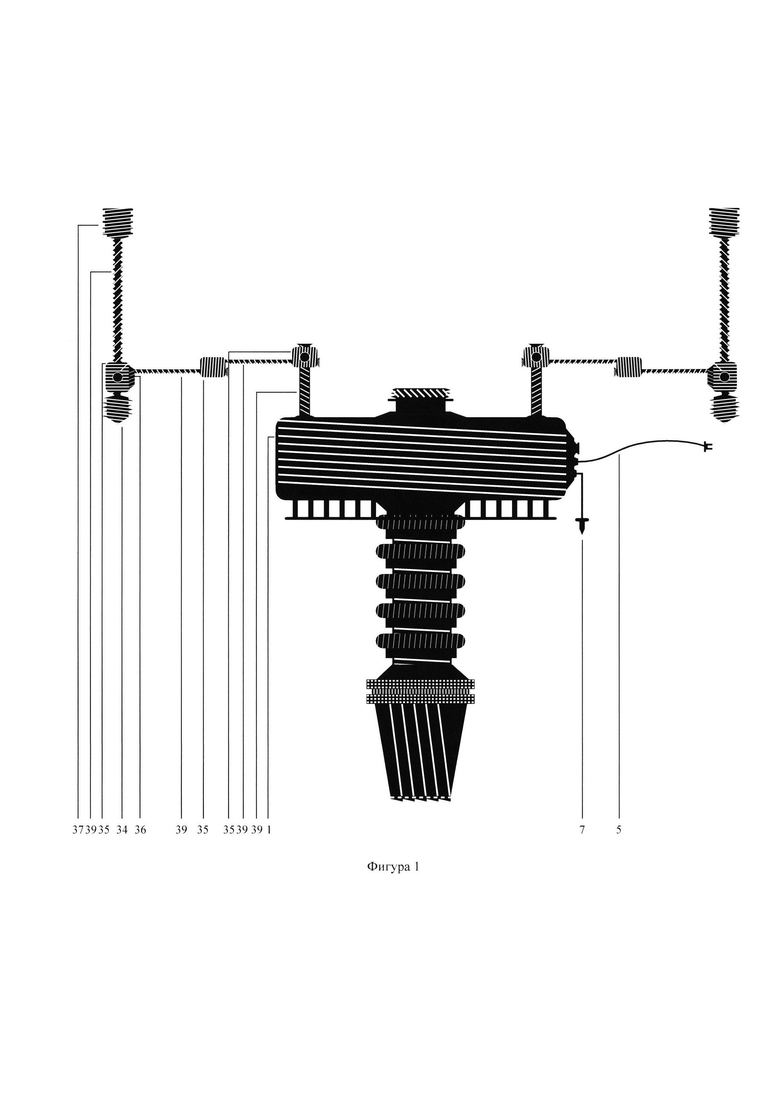
Фигура 1: Внешний вид прибора.
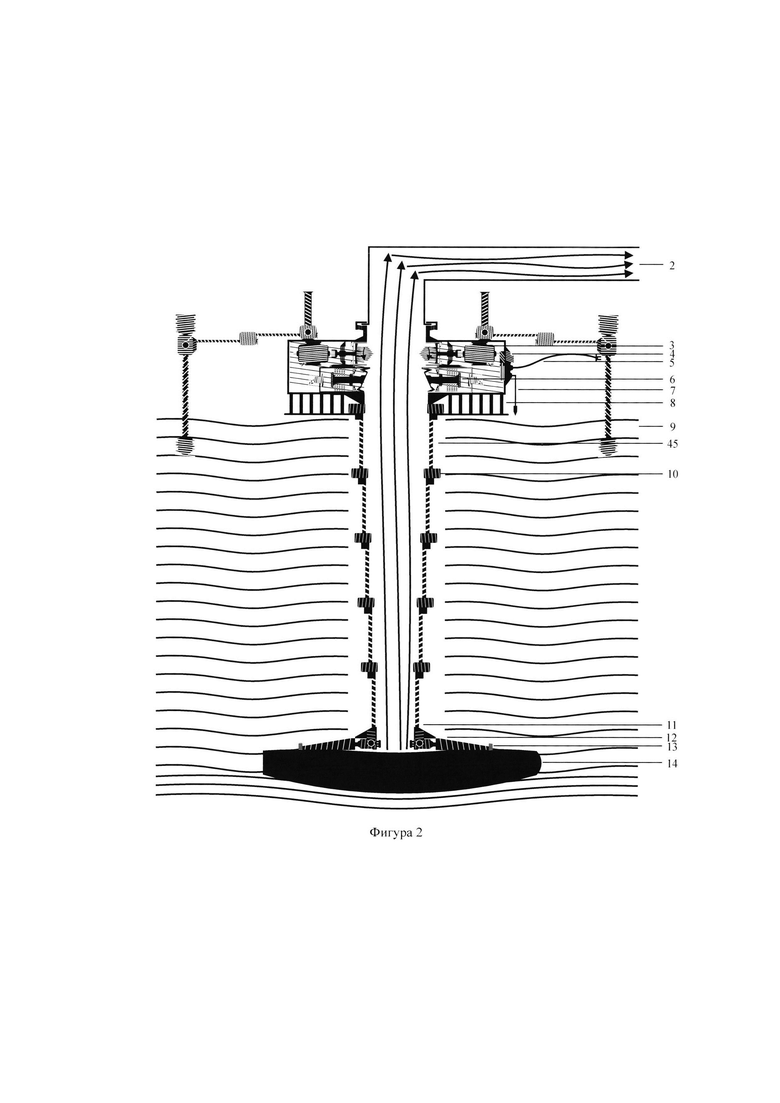
Фигура 2: Прибор во время рабочего процесса.
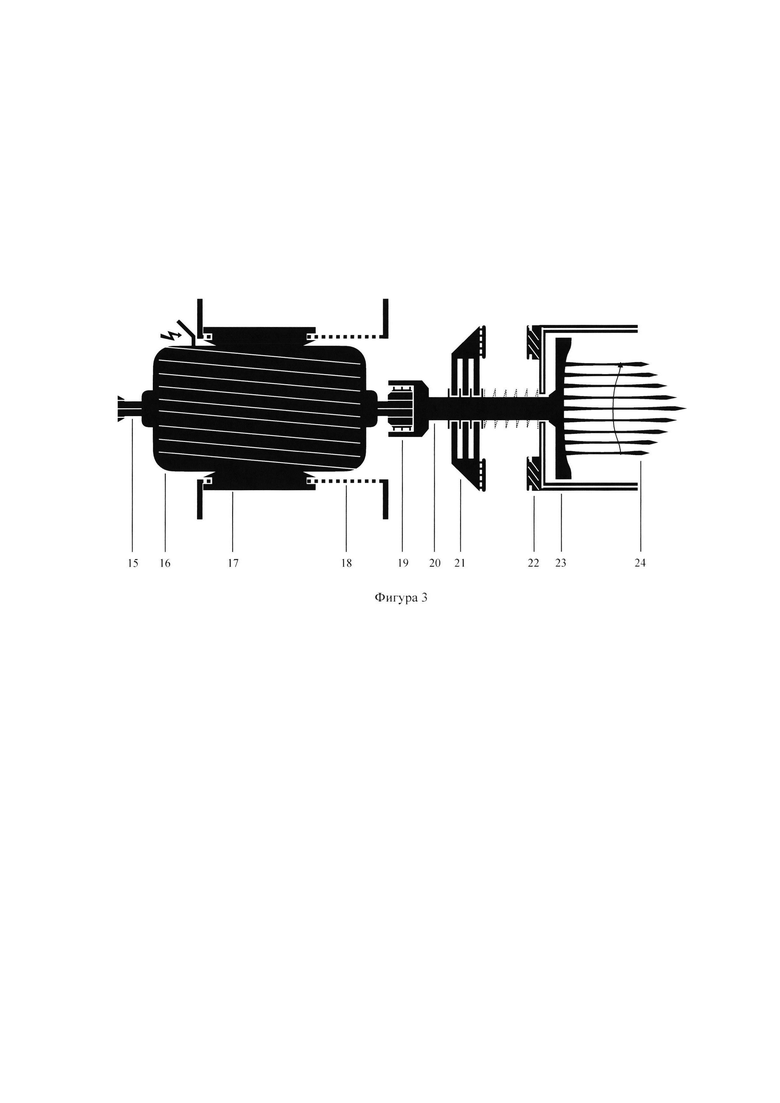
Фигура 3: Устройство создания давления.
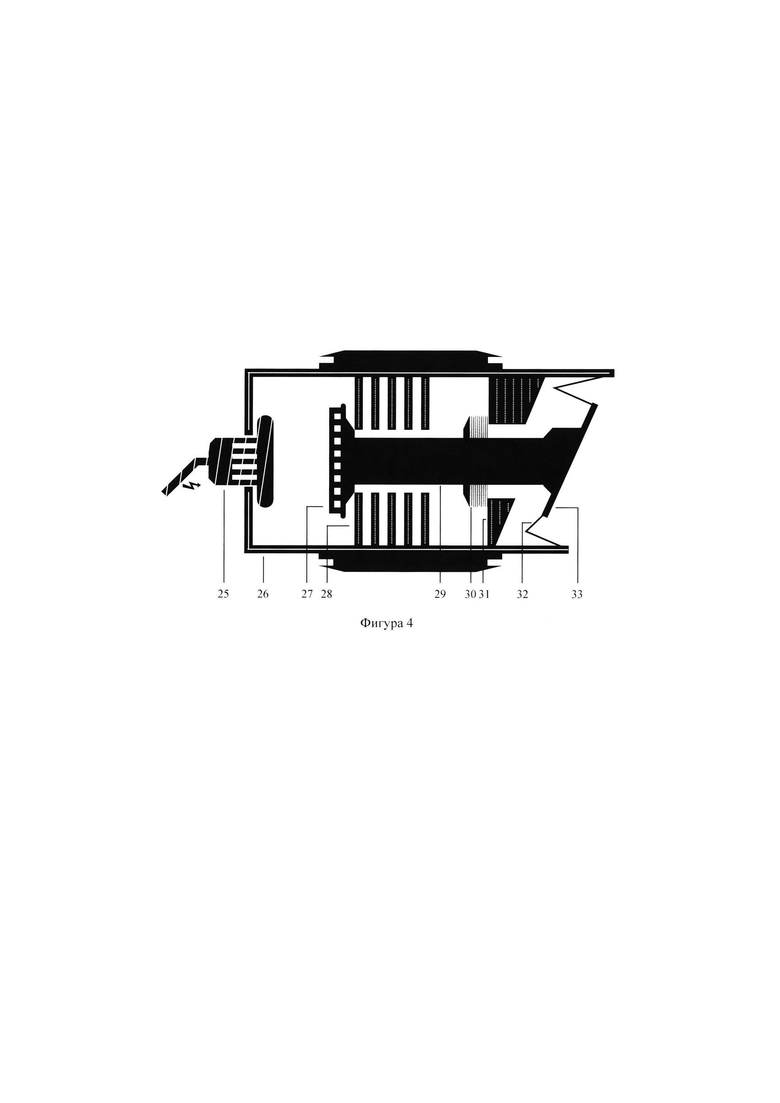
Фигура 4: Насос выкачки из земли.
Фигура 5: Выдвижная система фиксации прибора.
Фигура 6: Система складывания труб.
Фигура 7: Вращательный механизм лопастей бурения.
Фигура 8: Лопасти бурения и система развертывания лопастей.
Фигура 9: Блок управления, узел контроля и исправности систем.
Фигура 10: Беспроводная связь прибора с пультом.
Указанный технический результат достигается следующим образом:
Технический результат заключается в возможности работы прибора для выкачивания газа из-под земли автоматически, при подаче команд, не требуя участия человека.
В блоке управления (4) установлен приемопередатчик (68), который сопряжен с приемопередатчиком (74), подключенным к пульту управления (75), при этом управление узлами и механизмами прибора производится блоком управления (4), задание действий и контроль их выполнения производится через программу, установленную на пульте управления (75), а рабочий процесс выполнения действий производится прибором автоматически при подаче команды и не требует участия человека.
Прибор (1) подключается к системе электропитания, через силовой кабель (5). Прибор (1) размещается поверх грунта (9) на встроенной подставке (8). В грунт вкапывается заземление (7). Производится фиксация прибора, при помощи выдвижной системы фиксации, создавая прибору устойчивость. Производится включение системы вращения лопастей бурения, которая погружаясь в землю, производит развертывание труб (45). При достижении местонахождения добываемого газа (14), производится отключение системы вращения лопастей бурения и отключение электрозамка (13). Включается механизм развертывания лопастей (11), который производит развертывание лопастей (12). К прибору (1) производится подключение газотранспортной системы (2). Производится включение насосов выкачивания из земли (6) и устройства создания давления (3) в газотранспортной системе, которые регулируемые через пульт управления. Производится рабочий процесс.
При выполнении работ, осуществляется отключение прибора (1) от газотранспортной системы (2). Производится выключение насосов выкачивания из земли (6) и устройства создания давления (3) в газотранспортной системе. Включается механизм развертывания лопастей (11), который производит свертывание лопастей (12) и включение электрозамка (13). Включается система складывания труб (10), производится складывание труб (45). Трубы (45) вытягивают из-под грунта (9) бурильную установку. Производится складывание систем фиксации. Из грунта (9) вытягивается заземление (7). Производится отключение блока управления (4) и отключение силового кабеля (5) от системы электропитания. Прибор (1) сложен и готов к транспортировке.
Фиг. 1, Фиг. 2.
Принцип работы устройства создания давления:
Производится включение электромагнита (22), производящего выдвижение всей конструкции, при помощи намагничиваемой пластины (21) и механизма хода (17), который производит ход по направляющим (18). Из основания (23) производится выдвижение лопастей (24) в центральную область прибора. Производится включение электровращателя (16), который производит вращения балки (15) с присоединенной, при помощи соединительной чаши (19), балкой (20) на которой закреплены лопасти (24). Производится рабочий процесс. Электровращатель (16), выполненный с возможностью регулирования по мощности, это позволяет увеличивать или уменьшать скорости вращения лопастей (24), задействованных для создания давления, необходимого для транспортировки газа по газотранспортной системе. При выполнении работ производится отключение электровращателя (16) и электромагнита (22). Устройство, при помощи пружины, размещенной на основании (23) возвращается в исходное положение.
Фиг. 3.
Принцип работы насосов выкачки из земли:
Насосы выкачки установлены в герметичном корпусе (26). В герметичном корпусе (26) встроен электромагнит (25), который, при включении, производит ход намагничиваемой пластины (27) с закрепленной балкой (29) с встроенной насосной частью (33). Направляющие кольца (28) производят равномерное движение хода балки (29). Насосная часть (33) по торцам, соединена резиновой эластичной стенкой (32), которая создает герметизацию внутри насоса, но позволяет выполнять ход насосной части (33). Во время включения электромагнита (25), производится ход намагничиваемой пластины (27), балки (29) и насосной части (33). При достижении насосной части (33) уголка фиксации (31) производится отключение электромагнита (25) и пружина (30) производит возврат балки (29) с совмещенной с ходовыми элементами в исходное положение, это позволяет производить подъем газа из-под земли. В насосе выкачки установлен электромагнит (25) тактовый, который выполнен с возможностью регулирования по мощности и скорости для задания в насосе выкачки значения, необходимого для поднятия газа из-под земли, при расположении газа на различных глубинах.
Фиг. 4.
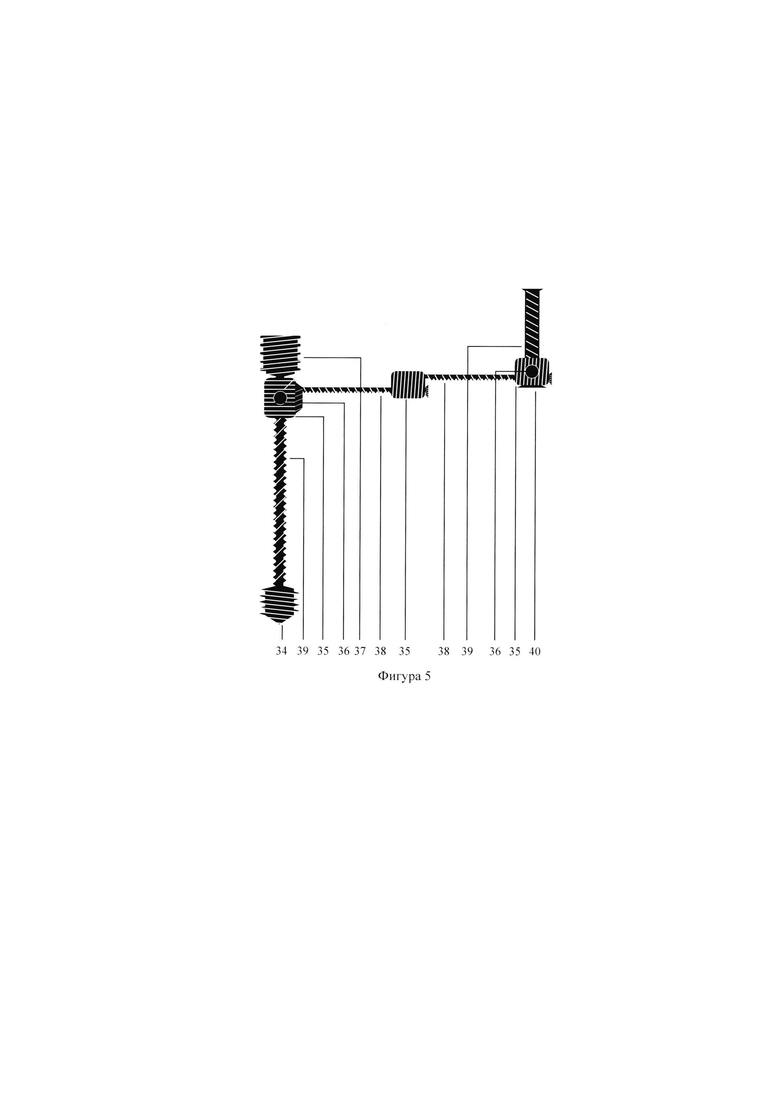
Принцип работы выдвижной системы фиксации прибора:
В ручном режиме производится перевод системы из горизонтального положения конструкции в вертикальное, при помощи механического вращателя (36). Выдвижная система на приборе креплением (40), винтовым способом. Производится включение электровращателя (35) который перемещается по балке (39) в крайнее верхнее положение. Производится включение электровращателей (35), производящий переход в крайнее правое положение балки (38). Производится включение электровращателя (35), производящий вращение балки (39) при помощи внешней резьбы. В нижнем основании балки (39) расположен бур (34), производящий погружение балки (39) в грунт земли. Нагрузку на балку (39), во время бурения, производят весовые пластины (37). Слаживание системы производится в обратной последовательности. Система фиксации, во время рабочего процесса прибора, создает устойчивость и служит фиксацией во время бурения.
Фиг. 5.
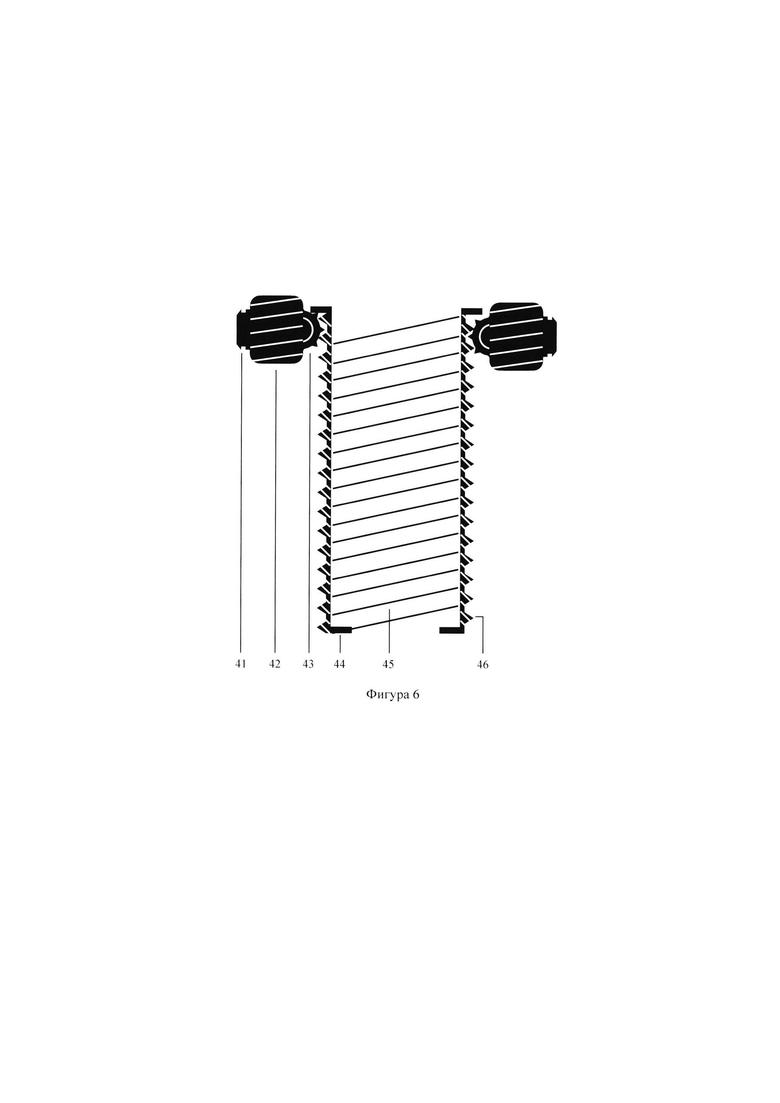
Принцип работы системы складывания труб:
В сложенном положении прибора, трубы (45), сложены внутри друг друга коленчатым способом. Нижняя часть крайней трубы (45) совмещена с бурильной установкой, при помощи крепления (44), винтовым способом. Трубы служат весовой нагрузкой, во время погружения бурильной установки. Развертывание труб производится механически. Бурильная установка выполняет вращение по часовой стрелке, плавно погружаясь в грунт земли. Производится поэтапное развертывание и погружение труб (45), которые при помощи внешней резьбы, (46) проходят диск вращения (43) развертываются. При улаживании труб (45), производится включение электровращателя (42) который вращает диск вращения (43). Диск вращения (43) производит подъем трубы (45), при помощи внешней резьбы (46). Складывание колен труб производится поэтапно, от нижней в верх. Электровращатель (42) закреплен при помощи крепления (41) в нижнем основании внутренней части трубы (45), расположенной на уровень выше. Бурильная установка вытягивается механически, и ее подъем осуществляется при помощи складывания труб. Длина одного колена от 1 до 3 метров, максимальное количество колен на устройстве 27 штук.
Фиг. 6.
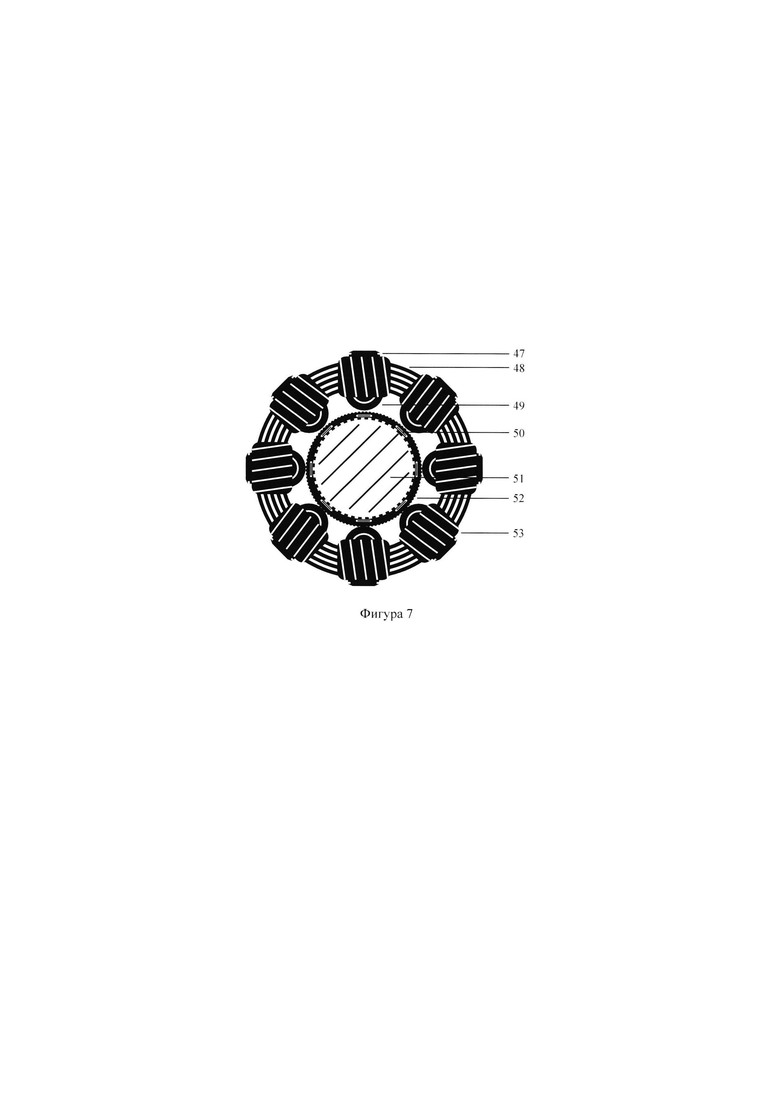
Принцип работы вращательного механизма лопастей бурения:
Производится включение электровращателей (53), производящие вращение диска вращения (49). Диск вращения (49) осуществляет вращение оси вращения (52) с закрепленными на ней лопастями (50). Внутри оси вращения (52) вырезано отверстие (51), через которое проходит выкачиваемый газовый поток. Электровращатели (53) соединены между собой креплением (48). На внешнем основании электровращателей (53) расположено крепление (47), которое закрепляет механизм вращения лопастей, в нижнем основании трубы (45). Электровращатели (53) регулируемые по мощности.
Фиг. 7.
Принцип работы лопастей бурения и системы развертывания лопастей:
Лопасти бурения состоят из: стального основания (62) с углом наклона 30 градусов, режущая часть (63), электрозамка (13), нижняя режущая часть (64), прут фиксации (59) ось вращения и балка (60). При развертывании лопастей, производится отключение электрозамка (13) и включение электровращателя (56), который производит ход балки (55) с закрепленной на крайнем ее основании пластины (57), которая переводит ось вращения (60) в крайнее правое положение с фиксацией на магнитной пластине (58). Производится развертывание лопастей. При свертывании лопастей, производится включение электровращателя (56), который производит возврат балки (55) в исходное положение. Пружина (61) производит перевод оси вращения и балки (60) в исходное положение. Производится включение электрозамка (13), который производит фиксацию лопастей в нижней части основания. Механизм развертывания лопастей, расположен в герметичном корпусе (54) и закреплен на оси вращения (52).
Фиг. 8.
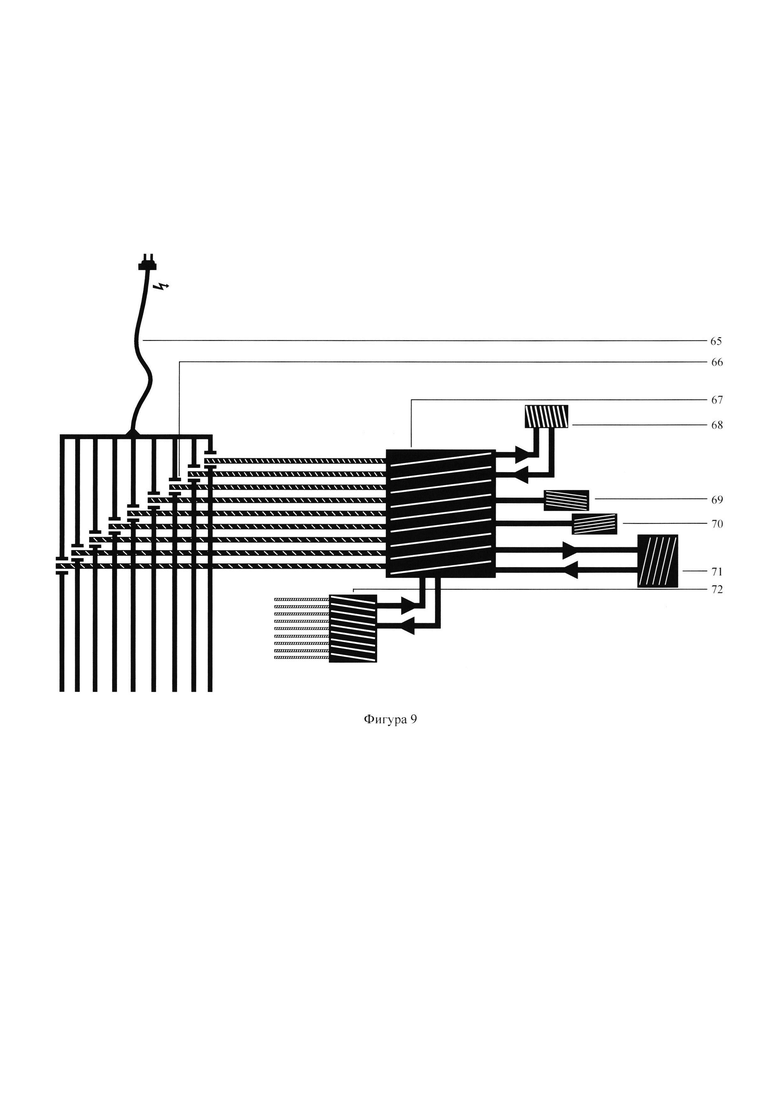
Принцип работы блока управления и узла контроля и исправности систем:
Блок управления включает в своем составе: процессор (67), приемопередатчик (68), оперативную память (69), видеокарту (70), блок хранения информации (71), узел контроля и исправности систем (72) силовой кабель (65), пропускной фильтр (66). Управление внешнее, осуществляется через приемопередатчик (68), команды поступают на процессор (67), из процессора (67) команда передается на узел (механизм) при помощи связующего кабеля (66). При возникновении неисправности (отказе выполнения действий) узла (механизма): из процессора (67) подается команда на узел контроля и исправности систем (72), из узла контроля и исправности систем (72) команда уходит на узел (механизм), из узла (механизма) ответ на команду возвращается в узел контроля и исправности систем (72), далее, ответ на команду, поступает на процессор (67), из процессора (67) поступает на приемопередатчик (68) и, через беспроводную связь (74), поступает на приемопередатчик (74), встроенный в пульт управления (75), и производится вывод информацию на экране пульта управления (75).
Фиг. 9.
Принцип работы беспроводной связи прибора с пультом:
В блоке управления (4) прибора установлен приемопередатчик (68), который сопряжен с приемопередатчиком (74) подключенным к пульту управления (75), по беспроводному каналу связи (73). Управление и отдача команд на блок управления (4), производится через установленную программу на пульте управления (76), а рабочий процесс выполнения действий производится прибором автоматически, при подаче команды и не требует участие человека. Между приемопередатчиками (68), (74), во время рабочего процесса, происходит постоянный обмен информацией.
Фиг. 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированная оружейная установка | 2022 |
|
RU2797935C1 |
| ВЕРХНИЙ СИЛОВОЙ ПРИВОД БУРОВОЙ УСТАНОВКИ | 2007 |
|
RU2369713C1 |
| СПОСОБ ГИДРОРАЗРЫВА ПОДЗЕМНЫХ ПЛАСТОВ ВО ВРЕМЯ ИХ БУРЕНИЯ | 2008 |
|
RU2502866C2 |
| УНИВЕРСАЛЬНЫЙ АВТОЖИР | 2013 |
|
RU2543471C2 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ САМОЛЕТОМ-ВЕРТОЛЕТОМ | 2018 |
|
RU2710317C1 |
| ДАТЧИК МАГНИТНОГО СОПРОТИВЛЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ НАМАГНИЧИВАЕМОЙ КОНСТРУКЦИИ В ПОДЗЕМНОЙ СРЕДЕ | 2014 |
|
RU2671016C2 |
| АВТОМАТИЗИРОВАННЫЙ НАВИГАЦИОННЫЙ БУРОВОЙ КОМПЛЕКС ДЛЯ ПРОКЛАДКИ КОММУНИКАЦИЙ | 2002 |
|
RU2215874C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| СПОСОБ ВОЗДУШНОГО СТАРТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258639C1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |


Изобретение относится к нефтегазодобывающий промышленности, преимущественно к установкам для добычи газа. Технический результат заявленного изобретения заключается в возможности работы прибора для выкачивания газа из-под земли автоматически, при подаче команд, не требуя участия человека. Заявлен автономный прибор выкачивания газа из-под земли, выполненный в виде герметичного корпуса, снабженного силовым кабелем и заземлением. На верхней части корпуса прибора винтами закреплена выдвижная система фиксации из балок, выполненная с возможностью перевода выдвижной системы при помощи механического вращателя из горизонтального положения конструкции в вертикальное. При помощи электровращателей - осуществления регулирования длины балок и вращения буров, расположенных в нижних основаниях крайних балок, для их фиксации в грунт земли во время рабочего процесса прибора, внутри корпуса установлены устройства создания давления, выполненные с возможностью создания давления, необходимого для транспортировки газа по газотранспортной системе. Ниже устройств создания давления установлены насосы выкачки, регулируемые по мощности и скорости и выполненные с возможностью задавать ими значения давления, необходимого для поднятия газа из-под земли. В нижней части корпус прибора соединен с системой складывания труб, сложенных внутри друг друга, коленчатым способом. При этом нижняя часть крайней трубы совмещена с бурильной установкой, выполненной в виде лопастей и системы их развертывания, снабженной электрозамком. Трубы выполнены с внешней резьбой для поэтапного развертывания при помощи дисков вращения электровращателей системы вращения лопастей бурения, которая также включает диск вращения между электровращателями и осью вращения, на которой закреплены лопасти. Ось вращения выполнена с отверстием для прохода газа. Система вращения лопастей бурения выполнена с возможностью ее отключения при достижении местонахождения добываемого газа, отключением электрозамка. Управление всеми узлами прибора осуществляется блоком управления, установленным в корпусе прибора и сопряженным с пультом управления при помощи приемопередатчиков. При этом на пульте управления установлена программа для задачи действий и контроля их выполнения в автоматическом режиме. 2 з.п. ф-лы, 10 ил.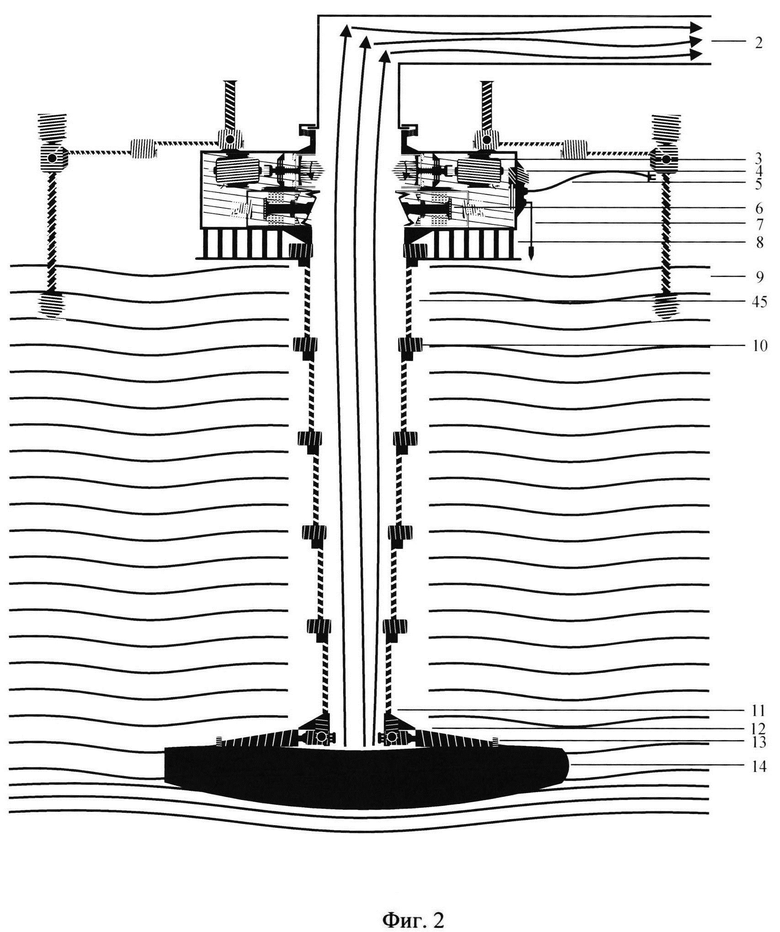
1. Автономный прибор выкачивания газа из-под земли, выполненный в виде герметичного корпуса, снабженного силовым кабелем и заземлением, на верхней части корпуса прибора винтами закреплена выдвижная система фиксации из балок, выполненная с возможностью перевода выдвижной системы при помощи механического вращателя из горизонтального положения конструкции в вертикальное, а при помощи электровращателей - осуществления регулирования длины балок и вращения буров, расположенных в нижних основаниях крайних балок, для их фиксации в грунт земли во время рабочего процесса прибора, внутри корпуса установлены устройства создания давления, выполненные с возможностью создания давления, необходимого для транспортировки газа по газотранспортной системе, ниже которых установлены насосы выкачки, регулируемые по мощности и скорости и выполненные с возможностью задавать ими значения давления, необходимого для поднятия газа из-под земли, в нижней части корпус прибора соединен с системой складывания труб, сложенных внутри друг друга, коленчатым способом, при этом нижняя часть крайней трубы совмещена с бурильной установкой, выполненной в виде лопастей и системы их развертывания, снабженной электрозамком, причем трубы выполнены с внешней резьбой для поэтапного развертывания при помощи дисков вращения электровращателей системы вращения лопастей бурения, которая также включает диск вращения между электровращателями и осью вращения, на которой закреплены лопасти, ось вращения выполнена с отверстием для прохода газа, система вращения лопастей бурения выполнена с возможностью ее отключения при достижении местонахождения добываемого газа, отключением электрозамка, управление всеми узлами прибора осуществляется блоком управления, установленным в корпусе прибора и сопряженным с пультом управления при помощи приемопередатчиков, при этом на пульте управления установлена программа для задачи действий и контроля их выполнения.
2. Автономный прибор по п. 1, отличающийся тем, что в насосах выкачки установлен тактовый электромагнит с возможностью регулировки мощности и скорости.
3. Автономный прибор по п. 1, отличающийся тем, что устройство создания давления включает электровращатель, выполненный с возможностью регулирования по мощности для увеличения или уменьшения скорости вращения лопастей.
| Автоматический сцепной прибор | 1931 |
|
SU28514A1 |
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА В ПРОЦЕССЕ БУРЕНИЯ | 2018 |
|
RU2681325C1 |
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| СКВАЖИННАЯ УСТАНОВКА ДЛЯ РАБОТЫ В ГОРИЗОНТАЛЬНЫХ СКВАЖИНАХ И СПОСОБ ЕЕ РАБОТЫ | 2003 |
|
RU2246049C1 |
| Устройство для питания сварочного трансформатора машины для контактной электросварки | 1953 |
|
SU99817A1 |
| US 20100189572 A1, 29.07.2010. | |||
