ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству для измерения расстояния посредством беспроводной связи между устройством, действующим как первое устройство, и вторым устройством для беспроводной связи, причем беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, причем протокол содержит передачу сообщения об измерении вторым устройством. Кроме того, изобретение относится к способам измерения расстояния и компьютерным программным продуктам для использования в устройстве или сервере.
Настоящее изобретение относится, в целом, к области систем определения местоположения и, в частности, обеспечивает различные устройства и способы для проверки измерений расстояний, а также соответствующие компьютерные программные продукты.
УРОВЕНЬ ТЕХНИКИ
Может существовать потребность в услугах по учету местоположения в закрытых помещениях. Например, в больших закрытых комплексах, таких как больницы, университеты, автостоянки, торговые центры и/или офисы, мобильным устройствам могут быть предоставлены услуги беспроводной связи на близком расстоянии. Система определения местоположения внутри помещения может предоставлять услугу потребителям (далее называемым конечными пользователями); услугу, на которую в конечном итоге будут полагаться конечные пользователи. Такие услуги, основанные на определении местоположения, могут быть предоставлены только устройствам, которые находятся поблизости, т.е. на ограниченном расстоянии от предоставляющего услуги устройства. В дополнительном примере электронный беспроводной ключ двери автомобиля должен находиться вблизи автомобиля, прежде чем он сможет открыть дверь. Поддельный дверной ключ может исказить протокол измерения расстояния таким образом, что может открыть дверь, когда он находится намного дальше от автомобиля, чем следовало бы.
Поэтому важно, чтобы измерение расстояния было надежным. Надежный в этом контексте означает, что отвечающее устройство обеспечивает надежные и правильные измеренные данные о расстоянии или времени прихода в отличие от данных о расстоянии или времени прихода, которые были искажены или фальсифицированы, чтобы умышленно привести к появлению расстояния, отличного от реального расстояния до отвечающего устройства.
Известная система измерения расстояния недавно разработана в версии протокола беспроводной связи, определенного в IEEE 802.11, см. справочный документ [802.11]. Версия содержит протокол измерения дальности для определения расстояния между двумя устройствами и обеспечивает возможность точного измерения расстояния и определения местоположения устройств с разрешением до 1 метра или даже ниже. Протокол измерения дальности, называемый процедурой точного измерения времени (FTM), определен в [802.11], глава 10.24.6, и точно измеряет время прихода сообщений об измерениях для определения времени прохождения сигнала в прямом и обратном направлениях (RTT) и определяет расстояние на основании измеренного времени прихода сообщений в сочетании с синхронизацией передачи. Например, принимая во внимание тот факт, что беспроводной сигнал распространяется в свободном воздухе по существу со скоростью света, излучению требуется 3,3 нс для преодоления расстояния в метр, в то время как станция Wi-Fi может достигать временного разбиения около 0,1 нс.
Следует отметить, что данная заявка относится к области протоколов измерения дальности. Они могут соответствовать так называемым измерениям времени пролета, которые измеряют время, необходимое электромагнитному излучению для прохождения между передатчиком и приемником. Они принципиально отличаются от измерения расстояния, выполняемого в протоколе IP/HTTP, также известного как время ответа, которое измеряет время, необходимое для передачи пакета IP-данных в сети от устройства-источника к устройству-приемнику, причем такая передача может включать ряд промежуточных устройств.
Чтобы два устройства могли определять расстояние между собой на основании измерений времени прихода, они должны работать в соответствии с протоколом определения дальности. Например, инициирующее беспроводное устройство может инициировать запрос на запуск измерения времени прохождения сигнала в прямом и обратном направлениях. Отвечающее устройство может определять интервал между отправкой сообщения и получением запроса и отправлять временной интервал на инициирующее устройство.
Однако посредством отправки ложных данных устройство может фактически заявить, что оно находится ближе или дальше, чем оно есть на самом деле. Кроме того, может быть необходимо передавать сообщение об измерении в заданное время, например согласно временной сетке. Вредоносное устройство может намеренно отправлять сообщение об измерении в другое время. Такое злонамеренное поведение может привести к возможному злоупотреблению услугами, основанными на определении местоположения, если инициирующее устройство считает определенную информацию о расстоянии/местоположении точной. Например, услуга, основанная на определении местоположения, может автоматически запускать некоторую транзакцию.
Таким образом, в известных системах измерения или принятые данные о расстоянии могут быть искажены и, следовательно, им нельзя полностью доверять.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Первое устройство, которое измеряет расстояние до второго устройства с использованием способов измерения времени (Time Measurement, TM) или точного измерения времени (Fine Time Measurement, FTM) стандарта 802.11, может попытаться защитить себя от ложных данных о времени прихода (time of arrival, TOA) и времени отправления (time of departure, TOD), отправляемых вредоносными устройствами, которые при этом хотят казаться находящимися на другом, в частности, меньшем расстоянии, чем они есть на самом деле.
Для противодействия такому поведению система измерения расстояния может задействовать третье устройство, которое также выполняет измерение расстояния для определения второго расстояния между третьим устройством и вторым, потенциально вредоносным устройством. Посредством сравнения обоих расстояний, а также с учетом знания расстояния между первым устройством и взаимодействующим устройством и уверенности в указанном расстоянии может быть выполнен проверочный тест на обоих определенных расстояниях. Однако, хотя вредоносному устройству может быть сложнее исказить оба измерения расстояния, чтобы они прошли проверочный тест, это все же возможно.
Задачей изобретения является создание системы для повышения надежности измерения расстояния на основании времени прихода. С этой целью предложены устройства и способы, определенные в прилагаемой формуле изобретения.
Согласно первому аспекту изобретения предлагается устройство для измерения расстояния посредством беспроводной связи между устройством, действующим в качестве первого устройства, и вторым устройством для беспроводной связи, причем беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, причем протокол содержит передачу сообщения об измерении вторым устройством;
причем устройство содержит:
- первый приемопередатчик для передачи и приема сообщений,
- первый процессор сообщений, выполненный с возможностью
- обработки сообщений в соответствии с протоколом измерения дальности;
- определения первого времени прихода сообщения об измерении на первом устройстве и
- определения первого расстояния между первым устройством и вторым устройством на основании первого времени прихода;
причем
- первый приемопередатчик содержит первую направленную антенну для обнаружения направления принятого сигнала, несущего сообщение, и
- первый процессор сообщений выполнен с возможностью связи с третьим устройством, причем третье устройство, действующее в качестве взаимодействующего устройства, расположено на достоверном расстоянии от первого устройства, взаимодействующее устройство использует направление соединения совместно с первым устройством, направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство;
причем третье устройство содержит
- беспроводной приемник для приема сообщений, причем приемник содержит третью направленную антенну для обнаружения направления принятого сигнала, несущего сообщение,
- третий процессор сообщений, выполненный с возможностью
- определения третьего направления при приеме сообщения об измерении на третьем устройстве,
- передачи данных поддержки на первое устройство, причем данные поддержки указывают на третье направление;
при этом первый процессор сообщений выполнен с возможностью оценки определенного расстояния, с возможностью
- определения первого направления при приеме сообщения об измерении на первом устройстве,
- определения первого угла между первым направлением и направлением соединения,
- приема данных поддержки от взаимодействующего устройства, причем данные поддержки содержат указание на третье направление, причем третье направление определяют третьим устройством при приеме сообщения об измерении на третьем устройстве;
- определения третьего угла между третьим направлением и направлением соединения на основании данных поддержки,
- выполнения проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле, причем проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют пригодной, или приемлемой, пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
Согласно еще одному аспекту изобретения предлагается способ измерения расстояния посредством беспроводной связи между первым устройством и вторым устройством, причем беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, причем протокол содержит передачу сообщения об измерении вторым устройством;
причем первое устройство содержит первую направленную антенну для обнаружения направления принятого сигнала, несущего сообщение;
причем способ включает:
- определение первого расстояния между первым устройством и вторым устройством на основании первого времени прихода сообщения об измерении на первом устройстве;
- связь с третьим устройством, причем третье устройство, действующее в качестве взаимодействующего устройства, расположено на достоверном расстоянии от первого устройства, взаимодействующее устройство использует направление соединения совместно с первым устройством, направление соединения указывает направление линии, соединяющей первое устройство и взаимодействующее устройство;
причем третье устройство содержит третью направленную антенну для обнаружения направления принятого сигнала, несущего сообщение, и выполнено с возможностью
- определения третьего направления при приеме сообщения об измерении на третьем устройстве, и
- обеспечения данных поддержки, причем данные поддержки указывают на третье направление;
причем способ включает, для оценки определенного расстояния,
- определение первого направления при приеме сообщения об измерении на первом устройстве,
- определение первого угла между первым направлением и направлением соединения,
- определение третьего угла между третьим направлением и направлением соединения на основании данных поддержки,
- выполнение проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле, причем проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
Согласно еще одному аспекту предлагается способ действия в качестве взаимодействующего устройства при измерении расстояния посредством беспроводной связи между первым устройством и вторым устройством, причем взаимодействующее устройство расположено на достоверном расстоянии от первого устройства, взаимодействующее устройство использует направление соединения совместно с первым устройством, направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство. Беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, причем протокол содержит передачу сообщения об измерении вторым устройством. Первое устройство содержит первую направленную антенну для обнаружения направления принятого сигнала, несущего сообщение, и выполнено с возможностью определения первого расстояния между первым устройством и вторым устройством на основании первого времени прихода сообщения об измерении на первом устройстве. Третье устройство содержит третью направленную антенну для обнаружения направления принятого сигнала, несущего сообщение. Способ включает:
- определение третьего направления при приеме сообщения об измерении на третьем устройстве, и
- обеспечение данных поддержки, причем данные поддержки указывают на третье направление. Первое устройство выполнено, для оценки определенного расстояния, с возможностью
- определения первого направления при приеме сообщения об измерении на первом устройстве,
- определения первого угла между первым направлением и направлением соединения,
- определения третьего угла между третьим направлением и направлением соединения на основании данных поддержки,
- выполнения проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле, причем проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
Вышеупомянутые признаки обеспечивают эффект, заключающийся в том, что, когда второе устройство участвует в протоколе измерения дальности, первое устройство может определять расстояние в соответствии с протоколом измерения дальности на основании первого времени прихода сообщения об измерении, переданного вторым устройством. Кроме того, третье устройство определяет третье направление при приеме того же сообщения об измерении на третьем устройстве. Третье устройство расположено на расстоянии от первого устройства, причем это расстояние известно первому устройству и считается надежным. В настоящем документе такое расстояние называется достоверным расстоянием. Кроме того, взаимодействующее устройство использует направление соединения совместно с первым устройством, направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство. Совместное использование означает, что и первое, и третье устройство знают это направление соединения как опорное направление, которое может быть использовано для определения углов и представляет собой систему координат, которая доступна для обоих устройств. Достоверное расстояние и направление соединения могут быть заданы или могут быть измерены отдельно, или могут быть введены пользователем. В настоящем документе такое третье устройство может быть названо взаимодействующим устройством.
Следует отметить, что третье устройство, действующее в качестве взаимодействующего устройства, не выполняет дальнейшее измерение расстояния в соответствии с протоколом измерения дальности или отдельное измерение углов с использованием некоторых дополнительных сообщений об измерениях. Вместо этого третье устройство взаимодействует для определения указанного третьего направления указанного того же сообщения об измерении на третьем устройстве и для передачи данных поддержки на первое устройство, причем данные поддержки основаны на третьем направлении. Например, данные поддержки могут содержать данные о третьем направлении относительно опорного направления или абсолютной сетки направлений или относительно какого-либо другого направления, определенного при приеме дополнительного сообщения, также принятого первым устройством. В альтернативном или дополнительном варианте данные поддержки могут содержать данные о третьем угле, причем третье устройство выполнено с возможностью определения третьего угла между третьим направлением и направлением соединения.
Первый процессор сообщений выполнен с возможностью определения первого направления при приеме сообщения об измерении на первом устройстве и определения первого угла между первым направлением и направлением соединения. После приема данных поддержки процессор получает возможность определения третьего угла между третьим направлением и направлением соединения с использованием данных поддержки. Затем выполняют проверочный тест на первом расстоянии, достоверном расстоянии, а также на первом угле и третьем угле. В предпочтительном варианте проверочный тест может принимать первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
В варианте осуществления проверочный тест включает проверку по теореме косинусов или проверку по неравенству треугольника для приемлемой пространственной совокупности. Предпочтительно проверка доказывает, может ли пространственная совокупность треугольника иметь соответствующие углы между сторонами.
В варианте осуществления протокол измерения дальности содержит обмен сообщениями, которые криптографически защищены на основании данных ключа, и первый процессор сообщений выполнен с возможностью совместного использования данных ключа с взаимодействующим устройством для обеспечения возможности третьему процессору сообщений криптографически обрабатывать сообщения в соответствии с протоколом измерения дальности. В предпочтительном варианте шифрование сообщений между первым и третьим устройствами защищает такие сообщения от подделки потенциально вредоносным вторым устройством.
В варианте осуществления первый процессор сообщений выполнен с возможностью определения достоверного расстояния в соответствии с протоколом измерения дальности, или первый процессор сообщений выполнен с возможностью определения направления соединения с использованием первой направленной антенны. Предпочтительно перед фактическими измерениями на втором устройстве определяют достоверное расстояние и/или направление соединения с использованием того же протокола измерения дальности и/или той же направленной антенны.
При необходимости третий процессор сообщений может быть выполнен с возможностью определения третьего времени прихода сообщения об измерении на третьем устройстве, тогда как данные поддержки также основаны на третьем времени прихода. В варианте осуществления первый процессор сообщений выполнен с возможностью определения третьего расстояния между третьим устройством и вторым устройством с использованием данных поддержки, касающихся третьего времени прихода, и возможностью выполнения проверочного теста также с использованием третьего расстояния. В предпочтительном варианте также за счет определения третьего расстояния в дополнение к указанным первому и третьему углам и использования третьего расстояния в проверочном тесте вредоносному второму устройству сложнее подделывать данные об измерениях и сообщениях для симулирования другого положения второго устройства.
В варианте осуществления устройство содержит часовой блок для обеспечения временной ссылки для определения указанного времени прихода, а первый процессор сообщений выполнен с возможностью синхронизации временной ссылки с соответствующим часовым блоком во взаимодействующем устройстве. Предпочтительно временная ссылка совместно используется первым и третьим устройствами. Третье время прихода может быть определено относительно временной ссылки, что позволяет данным поддержки содержать третье время прихода, определенное таким образом, и использоваться в таковом качестве первым устройством.
В варианте осуществления протокол измерения дальности содержит первое устройство, действующее в качестве инициирующего устройства, отправляющее инициирующее сообщение на второе устройство, в то время как второе устройство после приема инициирующего сообщения должно отправить сообщение об измерении. Первый процессор сообщений выполнен с возможностью обмена данными о смене ролей с третьим устройством для обеспечения третьему устройству возможности действия в качестве инициирующего устройства для измерения расстояния. Третье устройство выполнено, после приема данных о смене ролей, с возможностью определения третьего расстояния между третьим устройством и вторым устройством в соответствии с протоколом измерения дальности на основании второго сообщения об измерении для определения третьего направления при приеме второго сообщения об измерении на третьем устройстве и возможностью передачи третьих данных поддержки на первое устройство, причем третьи данные поддержки указывают на третье направление. Данные поддержки могут также включать в себя третье расстояние. Первый процессор сообщений выполнен с возможностью
- определения второго направления при приеме второго сообщения об измерении на первом устройстве,
- приема от третьего устройства третьих данных поддержки, и
- выполнения проверочного теста также с использованием второго направления и третьих данных поддержки.
В предпочтительном варианте за счет определения указанного второго направления и проверки первого и третьего расстояний и первого и второго направлений в комбинации второму устройству труднее постоянно искажать оба измерения расстояния.
В варианте осуществления третий процессор сообщений выполнен с возможностью определения мощности третьего сигнала по меньшей мере одного сообщения, принятого от второго устройства, и включения данных о мощности третьего сигнала в данные поддержки для первого устройства. Первый процессор сообщений выполнен с возможностью определения мощности первого сигнала по меньшей мере одного сообщения, принятого от второго устройства, и проверки надежности определенных расстояний посредством сравнения мощности первого сигнала и мощности третьего сигнала с соответствующими расчетными значениями мощности сигнала на определенных расстояниях. При необходимости и первое устройство, и третье устройство могут измерять мощность сигнала одного и того же сообщения от второго устройства. Предпочтительно добавляется дополнительный независимый механизм, обеспечивающий возможность проверки определенных расстояний.
В варианте осуществления первый процессор сообщений выполнен, после оценки того, что определенное расстояние не является надежным, с возможностью требования исполнения другого протокола безопасности со вторым устройством. Предпочтительно в альтернативном или дополнительном варианте первый процессор сообщений выполнен, после оценки того, что определенное расстояние не является надежным, с возможностью запроса на дополнительное измерение расстояния с использованием другого протокола измерения дальности и/или другого типа беспроводной связи. В альтернативном или дополнительном варианте первый процессор сообщений выполнен, после оценки того, что определенное расстояние не является надежным, с возможностью запрета или ограничения доступа по меньшей мере к некоторым данным и/или по меньшей мере к одной функции в первом устройстве. Предпочтительно предотвращается злонамеренный доступ или использование любой функции или данных в первом устройстве.
Согласно дополнительному аспекту изобретения система для измерения надежного расстояния содержит устройство и третье устройство, как описано выше, и четвертое устройство, действующее в качестве второго взаимодействующего устройства, расположенное на втором достоверном расстоянии от первого устройства и расположенное на третьем достоверном расстоянии от третьего устройства, причем взаимодействующее устройство использует второе направление соединения совместно с первым устройством. Второе направление соединения указывает на направление линии, соединяющей первое устройство и второе взаимодействующее устройство. Четвертое устройство содержит четвертый беспроводной приемник для приема сообщений, причем приемник содержит четвертую направленную антенну для обнаружения направления принятого сигнала, несущего сообщение, четвертый процессор сообщений, выполненный с возможностью определения четвертого направления при приеме сообщения об измерении на четвертом устройстве и передачи четвертых данных поддержки на первое устройство, причем четвертые данные поддержки указывают на четвертое направление. Первый процессор сообщений выполнен с возможностью
- приема четвертых данных поддержки от второго взаимодействующего устройства,
- определения четвертого угла между четвертым направлением и вторым направлением соединения на основании четвертых данных поддержки, и
- выполнения проверочного теста также с использованием второго достоверного расстояния и четвертого угла.
В предпочтительном варианте за счет определения указанного дополнительного расстояния и проверки всех расстояний в комбинации второму устройству труднее постоянно подделывать указанные расстояния.
При необходимости проверочный тест может использовать комбинацию неравенств треугольников по меньшей мере в двух пространственных совокупностях, причем каждая совокупность содержит второе устройство и два устройства из комплекта первого устройства и взаимодействующих устройств. При необходимости первый процессор сообщений может быть выполнен с возможностью проверки соответствия первого местоположения второго устройства согласно первой пространственной совокупности второму местоположению второго устройства согласно второй пространственной совокупности.
При необходимости первый процессор сообщений может быть выполнен с возможностью проведения проверочного теста с использованием проверки несогласованности для определения того, все ли определенные расстояния больше нуля.
При необходимости первый процессор сообщений может быть выполнен с возможностью проведения проверочного теста на основании настройки, в которой третье устройство и четвертое устройство скомпонованы так, что достоверный угол между линией от третьего устройства к первому устройству и линией от четвертого устройства к первому устройству составляет по меньшей мере 90 градусов.
При необходимости первый процессор сообщений может быть выполнен с возможностью проведения проверочного теста на основании настройки, в которой третье устройство и четвертое устройство расположены напротив друг друга по отношению к первому устройству.
При необходимости первый процессор сообщений может быть выполнен с возможностью проведения проверочного теста на основании настройки, в которой второе достоверное расстояние соответствует достоверному расстоянию.
В варианте осуществления система содержит пятое устройство, действующее в качестве третьего взаимодействующего устройства, при этом первое взаимодействующее устройство имеет первое направление соединения, второе взаимодействующее устройство имеет второе направление соединения, а третье взаимодействующее устройство имеет третье направление соединения, причем каждое направление соединения указывает на направление линии, соединяющей первое устройство и соответствующее взаимодействующее устройство, и каждое направление соединения образует угол примерно 90 градусов с другими направлениями соединения. Первый процессор сообщений выполнен с возможностью проведения проверочного теста с использованием комбинации неравенств треугольников по меньшей мере в двух пространственных совокупностях, причем каждая совокупность содержит второе устройство и два устройства из комплекта первого устройства и взаимодействующих устройств. В предпочтительном варианте за счет определения указанного дополнительного расстояния и проверки всех расстояний в комбинации второму устройству труднее постоянно подделывать указанные расстояния.
В варианте осуществления способ включает выдачу инструкции первому устройству действовать в качестве инициирующего устройства для обеспечения первого угла или для обеспечения первого времени прихода или первого расстояния. В альтернативном или дополнительном варианте способ включает выдачу инструкции третьему устройству действовать в качестве взаимодействующего устройства для обеспечения данных поддержки, основывающихся на третьем направлении. Фактически, теперь управление измерением расстояния осуществляется посредством указанной выдачи инструкции.
Следует отметить, что выше, для ясности, оно было описано как выполнение первым устройством измерения расстояния и проверки надежности расстояния. Однако также возможно, что первое устройство, третье устройство и/или дополнительные взаимодействующие устройства обеспечивают всю необходимую информацию устройству управления, которое выполняет измерение расстояния и проверку достоверности расстояния.
Способ в соответствии с изобретением может быть реализован на компьютере как способ, осуществление которого основано на программном обеспечении, или на специализированном оборудовании, или в комбинации того и другого. Исполнимый код для способа в соответствии с изобретением может храниться в компьютерном программном продукте. Примеры компьютерных программных продуктов включают в себя запоминающие устройства, такие как карта памяти, оптические запоминающие устройства, такие как оптический диск, интегральные схемы, серверы, онлайн-программы и т.д. Компьютерный программный продукт может содержать долговременные средства программного кода, хранящиеся на компьютерочитаемом носителе, для выполнения способа в соответствии с изобретением, когда указанный программный продукт выполняется на компьютере. В варианте осуществления компьютерная программа содержит средство компьютерного программного кода, адаптированное для выполнения всех шагов или этапов способа в соответствии с изобретением при исполнении компьютерной программы на компьютере. Предпочтительно компьютерная программа реализована на компьютерочитаемом носителе. Обеспечен компьютерный программный продукт, загружаемый из сети и/или сохраняемый на компьютерочитаемом носителе и/или исполняемом микропроцессором носителе, причем продукт содержит инструкции программного кода для реализации способа, как описано выше, при исполнении на компьютере.
Другой аспект изобретения обеспечивает способ сделать компьютерную программу доступной для скачивания, например, включенной в приложение, основанное на определении местоположения. Этот аспект используют, когда компьютерная программа загружена, например, в магазин Apple App Store, Google Play Store или Microsoft Windows Store, и когда компьютерная программа доступна для скачивания из такого магазина.
Дополнительные предпочтительные варианты осуществления устройств и способов в соответствии с изобретением приведены в прилагаемой формуле изобретения, раскрытие которой включено в настоящий документ посредством ссылки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут понятны и объяснены далее со ссылкой на варианты осуществления, описанные в качестве примера в нижеследующем описании со ссылкой на сопроводительные чертежи, на которых
Фиг. 1 изображает устройство для беспроводной связи и измерения расстояния,
Фиг. 2 изображает пространственную совокупность из устройства для беспроводной связи и взаимодействующего устройства,
Фиг. 3 изображает пространственную совокупность двух устройств для беспроводной связи,
Фиг. 4 изображает еще одну пространственную совокупность двух устройств для беспроводной связи,
Фиг. 5 изображает пространственную совокупность, указывающую на определенные углы,
Фиг. 6 изображает совокупность инициирующего устройства и трех взаимодействующих устройств,
Фиг. 7 изображает дополнительную пространственную совокупность, содержащую два взаимодействующих устройства,
Фиг. 8 изображает способ измерения расстояния,
Фиг. 9 изображает способ действия в качестве взаимодействующего устройства при измерении расстояния,
Фиг. 10а изображает компьютерочитаемый носитель, и
Фиг. 10b схематически изображает процессорную систему.
Фигуры являются лишь схематическими и изображены без соблюдения масштаба. На Фигурах элементы, соответствующие уже описанным элементам, могут иметь одинаковые ссылочные позиции.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Способы измерения расстояния и устройства, использующие беспроводную связь, как описано ниже, обеспечивают по меньшей мере базовую функцию, т.е. предоставляют информацию о текущем расстоянии между мобильным устройством и другим устройством, например, в фиксированном положении. Далее описаны различные протоколы как примеры подходящих протоколов измерения дальности, использующих время прихода сообщений об измерениях, которые могут быть улучшены с использованием вариантов осуществления, описанных ниже.
Кроме того, в дополнение к измерениям расстояния могут быть выполнены измерения направления для определения расположения отвечающего устройства. Для описанной системы требуется одно или более взаимодействующих устройств, каждое из которых выполнено с возможностью измерения направления входящего радиочастотного сигнала, предназначенного для устройства измерения расстояния. Например, для измерения направления может быть использована направленная антенна или множество приемных антенн. В этих документах любая компоновка чувствительных к направлению антенных элементов называется направленной антенной.
Одиночные антенны размером примерно до длины волны не обладают большой направленностью. Однако при объединении нескольких антенн и задержке сигналов от отдельной антенны таким образом, что они конструктивно суммируются, когда принимаемые радиочастотные волны приходят с определенного направления, можно получить гораздо лучшую направленность. Посредством изменения отдельных задержек можно изменить направление максимальной чувствительности. Чем больше антенн используют, тем выше направленная чувствительность. По существу, направленные антенны хорошо известны и используются, например, в радарах с фазированной антенной решеткой. Хорошо известно, как оценить угол прихода с использованием нескольких антенн, см., например, [AAE]. Одиночные антенны размером намного больше длины волны обладают большой направленностью. Примером такой антенны является параболическая антенна, используемая для приема спутниковых сигналов или для релейных радиолиний.
Использование множества антенн в беспроводной связи описано в [802.11], например в 802.11n, 802.11ac, 802.11ax, 802.11ad и т.д. В то время как в 802.11n, 802.11ac, 802.11ax поддерживается до четырех антенн, и множество антенн в основном используют для создания множества пространственных каналов, в 802.11ad поддерживается от одной до двухсот отдельных антенн, и их используют для формирования диаграммы направленности. Вследствие использования очень высокой частоты, 60 ГГц, и того, что каждая отдельная антенна для 802.11ad очень мала (1/2 λ диполя имеет ширину 2,5 мм), так что улавливает небольшую радиочастотную энергию, необходимо формирование диаграммы направленности при помощи многих антенн для достижения полезного диапазона.
За исключением возможности формирования диаграммы направленности необходимо также откалибровать решетку так, чтобы направление луча относительно антенной решетки было известно для каждой настройки коэффициентов антенны, используемых для формирования диаграммы направленности. Когда необходимо измерить направление принятого радиочастотного сигнала, коэффициенты антенны могут быть настроены на максимальную амплитуду принимаемого сигнала, а направление радиочастотного сигнала определяют на основании установленных таким образом коэффициентов антенны. Следовательно, описанная ниже система измерения направления может, например, быть использована с 802.11ad, когда возможность измерения направления антенной решетки откалибрована. Однако также могут быть использованы другие технологии Wi-Fi и радиочастотные технологии на более низких частотах, когда антенны используют для формирования диаграммы направленности вместо создания множества пространственных каналов.
В системе, описанной ниже, первое или инициирующее устройство использует одно или более взаимодействующих устройств, которые находятся в известном положении относительно инициирующего устройства. Взаимодействующие устройства выполнены с возможностью измерения направления входящего радиочастотного сигнала с использованием направленной антенны и возможностью сообщения об этом направлении инициирующему устройству. Инициирующее устройство использует свойства треугольников для проверки пространственной совокупности отвечающего устройства, взаимодействующего(-их) устройства(-тв) и инициирующего устройства для обнаружения подделанного времени прихода и/или измерений расстояния со стороны мошеннических отвечающих устройств.
Первый пример измерения расстояния описан в документе [802.11]. В пункте 11.24.6 описана процедура точного измерения времени (FTM). Механизм FTM предназначен для измерения разницы абсолютного времени между часами в двух устройствах, так что одно также может компенсировать время, необходимое радиочастотным волнам, чтобы пройти от одного устройства к другому со скоростью света. В процедуре FTM одно из устройств отправляет временные метки своих часов другому таким образом, чтобы другое устройство могло измерять время прохождения сигнала в прямом и обратном направлениях (RTT) между ними (объяснено позже). Измерение расстояния между двумя устройствами с использованием 802.11 (Wi-Fi) выполняется путем измерения времени прохождения сигнала в прямом и обратном направлениях (RTT) с использованием процедуры точного измерения времени (FTM), описанной в пункте 11.24.6 [802.11], посредством умножения RTT на скорость света и деления на 2.
Ниже приведено объяснение FTM в [802.11], см., например, фигуры 11-35, 11-36, 11-37 и окружающий текст. Нумерация временных меток, приведенная ниже, взята с фигуры 11-36. Инициирующей станции (STA) нужно знать RTT или расстояние до другой STA, Отвечающей STA. Для этого Инициирующая STA отправляет инициирующий запрос FTM на Отвечающую STA. Отвечающая STA отправляет сообщение FTM_1(0, 0) на Инициирующую STA и измеряет точное время передачи. Отвечающая STA сохраняет это время как t1_1. Инициирующая STA измеряет прием сообщения FTM_1(0, 0) как t2_1. Она измеряет время передачи результирующего подтверждения (ACK) как t3_1. Однако Инициирующая STA пока что не может использовать значения t2_1 и t3_1.
Отвечающая STA измеряет время приема ACK, полученного как ответ на FTM_1(0, 0), и сохраняет его как t4_1. Через некоторое время (по меньшей мере Min Delta FTM секунд) Отвечающая STA передает FTM_2 (t1_1, t4_1) и отмечает время передачи как t1_2. Эта Инициирующая STA выполняет ту же процедуру, что описана выше, т.е. измеряет время приема FTM_2(t1_1, t4_1) как t2_2 и время передачи ACK как t3_2. Однако на этот раз Инициирующая STA может измерить RTT в соответствии с нижеследующим уравнением (11-5) из [802.11].
RTT = [ (t4_1 - t1_1) - (t3_1 - t2_1) ] (1)
Преобразование правой части вышеприведенной формулы дает
RTT = (t2_1 - t1_1) + (t4_1 - t3_1) (2)
откуда легко увидеть, что (t2_1 - t1_1) - это время прохождения кадра FTM по радиочастотной среде от Запрашивающей STA к Инициирующей STA при передаче кадра FTM, и что (t4_1 - t3_1) - это время прохождения кадра ACK по радиочастотной среде от Инициирующей STA к Отвечающей STA, так что их сумма действительно является временем прохождения сигнала в прямом и обратном направлениях. Для повышения точности вышеуказанное можно повторить, а RTT можно вычислить как среднее значение всех измерений.
t1_X - время отправления (TOD). TOD определено в [802.11] следующим образом: "TOD […] представляет время по отношению к временной базе, в которое начало преамбулы последнего переданного кадра точного измерения времени (FTM) появилось на разъеме передающей антенны". Преамбула представляет собой самую первую часть кадра PHY, что, помимо прочего, означает, что передатчик не передает радиочастотную энергию непосредственно перед преамбулой. Следовательно, Инициирующая STA должна измерять t3_X таким же образом, т.е. t3_X представляет время по отношению к временной базе, в которое начало преамбулы последнего переданного кадра ACK в качестве ответа на принятый кадр FTM появилось на разъеме передающей антенны.
t1_x - время прихода (TOA). TOA определено в [802.11] следующим образом: "TOА […] представляет время по отношению к временной базе, в которое начало преамбулы кадра АСК к последнему переданному кадру точного измерения времени (FTM) поступило на разъем приемной антенны". Следовательно, Инициирующая STA должна измерять t2_X таким же образом, т.е. t2_X представляет время по отношению к временной базе, в которое начало преамбулы последнего принятого кадра точного измерения времени (FTM) поступило на разъем приемной антенны".
Следовательно, минимальное время t3 - t2 равно длине принятого кадра FTM (,) + короткое межкадровое пространство (SIFS), а максимальное время t3 - t2 равно длине принятого кадра FTM (,) + распределенное межкадровое пространство (DIFS). Длина кадров FTM (,) может варьироваться. В остальной части этого документа использованы следующие определения:
- Lftm означает длину во времени физического кадра FTM, в результате которой Инициирующая STA измеряет t2 и t3;
- термин "время реакции" или "время реакции Инициирующей STA" и символ R означает время, которое требуется Инициирующей STA сразу после того, как последний символ физического кадра FTM (т.е. последний символ проверки CRC) поступил на разъем ее приемной антенны, к TOD кадра ACK, который она отправила в ответ на кадр FTM. Поскольку отправка кадра ACK является довольно простым действием, оно, вероятно, выполняется аппаратно и, следовательно, может быть постоянным.
В пункте 11.24.5 документа [802.11] определена процедура измерения времени (TM). Есть некоторые отличия от процедуры FTM, наиболее значительным из которых является лучшее разрешение временных меток, что в принципе обеспечивает возможность более точного измерения расстояния. Приведенные ниже варианты осуществления могут быть использованы для TM таким же образом, как описано в настоящем документе для FTM.
Другой пример системы измерения расстояния, подобной FTM, описан в US 8762727B2. Отличие заключается в том, что Инициирующая STA называется узлом-источником, Отвечающая STA называется целевым узлом, и что узел-источник измеряет t1 и t4, а целевой узел измеряет t2 и t3 и отправляет эти данные на узел-источник.
Дополнительный пример системы измерения расстояния описан в Проекте партнерства третьего поколения (3rd Generation Partnership Project, 3GPP), он называется наблюдаемой временной разницей прихода сигнала (Observed Time Difference Of Arrival, OTDOA), см. документ [OTDOA], которая представляет собой функцию позиционирования, представленную в rel9 E-UTRA (радио LTE), см. ссылки [36.nnn], как объяснено ниже. Это способ мультилатерации, при котором оборудование пользователя (User Equipment, UE) измеряет разницу во времени между некоторыми конкретными сигналами, опорными сигналами позиционирования - PRS, от нескольких eNodeB (скажем, базовых станций) и сообщает об этой разнице во времени конкретному устройству в сети, серверу определения местоположения (перспективный обслуживающий центр определения местоположения мобильных объектов (Evolved Serving Mobile Location Center - E-SMLC)). На основании этой разницы во времени и знания местоположений eNodeB E-SMLC вычисляет положение UE. Описание LPP (протокола позиционирования LTE) можно найти в спецификации [36.355]. Точные детали сигналов PRS можно найти в разделе 6.10.4 [36.211], а простую процедуру OTDOA можно найти в описаниях тестовых примеров RAN5 OTDOA в разделе 9 технических условий [37.571-1]. Так же, как измерения для локализации в Wi-Fi, мобильное устройство может подделывать эти отчеты OTDOA, чтобы они появлялись в сети где угодно. Эти нижеприведенные варианты осуществления могут быть использованы для защиты от этого типа мошенничества. Другой термин для тех же измерений, подлежащих выполнению в OTDOA оборудованием пользователя (UE) - это RSTD (разность по времени опорного сигнала). Требования к точности измерения RSTD определены в [36.133].
Еще один пример измерения расстояния в 3GPP основан на времени прихода сообщений со ссылкой на временную сетку и называется измерением на основе расширенного идентификатора соты (Enhanced cell ID, E-CID). Способы на основе идентификатора соты были уже возможны до rel9. Расширенный идентификатор соты объединяет некоторые уже доступные измерения, некоторые из которых имеют повышенные требования к точности для улучшения возможностей точности позиционирования. Расширенный идентификатор соты, E-CellID или E-CID представляет собой функцию позиционирования, представленную в rel9 E-UTRA (радио LTE). UE сообщает в сеть (через обслуживающую соту или eNodeB на сервер определения местоположения, перспективный обслуживающий центр определения местоположения мобильных объектов - E-SMLC) идентификатор обслуживающей соты, опережение по времени (разность между временем передачи и приема) с обслуживающей сотой, мощность принятого опорного (узкополосного) сигнала (reference (narrowband) signal received power, RSRP/NRSRP), качество принятого (узкополосного) опорного сигнала ((narrowband) reference signal received quality, RSRQ/RSRQ). RSRP/NRSRP и RSRQ/RSRQ могут быть измерены и переданы из любой соседней соты, в то время как опережение по времени измеряется только для первичной соты (обслуживающей соты). Обслуживающая сота или eNodeB может сообщать ESMLC дополнительную информацию, такую как угол прихода. ESMLC оценивает положение UE на основании этой информации и своих знаний о положениях ячеек.
Измерение опережения по времени выполняют следующим образом. В LTE или GSM сота отправляет частотно-временную сетку возможностей отправки или приема с фиксированным временем. Для LTE отдельные частоты являются частотами поднесущих мультиплексирования с ортогональным делением частот (OFDM) и обычно разнесены на 15 кГц. Временная область состоит из последовательных кадров по 10 мс, каждый из которых состоит из десяти подкадров, а каждый подкадр состоит из двух интервалов по 0,5 мс. Эта частотно-временная сетка поддерживается сотой с очень строгим расчетом времени. Для каждого элемента сетки сота может осуществлять передачу на все мобильные устройства в радиусе действия (широковещательная передача) или на одно конкретное устройство. В некоторых элементах сетки (частота, комбинация подкадров или иногда комбинация частота-интервал) сота всегда будет осуществлять передачу, как определено в технических условиях 3GPP. Таким образом, эти элементы сетки идеально подходят для передачи системной информации на мобильные устройства в соте, такой как назначение каждого из элементов сетки, которые можно гибко использовать. В каждом из других элементов сетки, таких элементов, которые могут быть использованы более гибко, сота может транслировать на все мобильные устройства в радиусе действия, она может осуществлять передачу на конкретное мобильное устройство или может давать конкретному мобильному устройству разрешение выполнять передачу на соту или на другое мобильное устройство в соте.
Поскольку радиочастотным волнам требуется время, чтобы пройти от соты к мобильному устройству (около 300 метров в микросекунду), сетка обеспечивает задержку до мобильного устройства на это время прохождения. Предположим, это время прохождения составляет t секунд. Когда мобильное устройство начинает передачу точно с начала подкадра, в котором разрешена передача, оно начинает передачу на t секунд позже, чем начало подкадра в соте. Снова требуется t секунд, чтобы сигнал, передаваемый мобильным устройством, достиг ячейки. Следовательно, сота принимает передачу от мобильного устройства, которая начинается не точно с начала выделенного ей подкадра, а на 2t секунд позже. Посредством измерения этой задержки сота может определить расстояние до мобильного устройства.
Если мобильное устройство находится далеко от соты, конец его передачи в подкадре может поступить позже, чем начало следующего подкадра, что вызовет наложение. Для решения этой проблемы сота может запросить использование мобильным устройством определенной величины опережения по времени, закодированной в так называемом значении ТА в команде на опережение по времени, адресованной конкретному мобильному устройству. В этом случае мобильное устройство начинает свою передачу на величину ТА раньше, чем начало подкадра, определенное мобильным устройством. Максимальное возможное значение для опережения по времени составляет 0,67 мс, что соответствует расстоянию от мобильного устройства до соты чуть более 100 км. Технические условия 3GPP TS 36.321 [36.321], раздел 6.1.3.5 "Элемент управления MAC командой на опережение по времени" описывает процедуры регулировки значения TA для LTE.
Мобильное устройство, которое хочет казаться находящимся на другом расстоянии, может начать свою передачу раньше, чем предполагается по частотно-временной сетке и значению TA, которое оно получило от соты, когда оно хочет казаться ближе к соте, или начать передачу позже, чем это предполагается, когда он хочет казаться дальше от соты, чем есть на самом деле.
Точное и правильное измерение расстояния важно в нескольких вариантах применения. Например, когда Wi-Fi FTM используют для измерения расстояния от автомобиля до брелока при помощи Wi-Fi, так чтобы автомобиль мог решить открыть свои двери, когда измеренное расстояние меньше, скажем, 5 метров, важно, чтобы фактическое расстояние до брелока действительно было меньше 5 метров. Другим примером может являться пример, когда устройству разрешено передавать в потоковом режиме контент, защищенный авторскими правами, на другое устройство, только если это устройство находится не дальше определенного расстояния. Точное и правильное измерение расстояния также может быть использовано для предотвращения атак с применением технологии "незаконный посредник" при настройке безопасного канала с проверкой подлинности. Объяснение приведено в следующих параграфах.
Когда двум устройствам необходимо защитить свою проводную или беспроводную связь, они могут шифровать свою связь. Однако для этого необходимо, чтобы оба беспроводных устройства знали один и тот же ключ. Метод Диффи-Хеллмана [DH] - это хорошо известный метод установления секретного ключа между двумя сторонами, при котором обмен данными между сторонами для установления секретного ключа не раскрывает третьим сторонам никакой информации об установленном секретном ключе. Каждая из двух сторон использует свою собственную пару "открытый ключ - закрытый ключ" и обменивается открытым ключом друг с другом. Каждая сторона может вычислить секретный ключ, используя свой собственный закрытый ключ и открытый ключ другой стороны и, возможно, некоторую другую информацию, например одноразовый номер (случайное число) от каждой стороны. Каждая сторона может генерировать пару ключей заново каждый раз, когда выполняет алгоритм шифрования Диффи-Хеллмана или повторно использует более старую пару ключей.
При выполнении метода Диффи-Хеллмана в сети устройство, которое получает открытый ключ для выполнения алгоритма Диффи-Хеллмана, не знает, от какого устройства этот открытый ключ. Это может быть использовано злоумышленником при так называемой атаке с применением технологии "незаконный посредник". Злоумышленник E может маскироваться под реальное устройство B, с которым хочет соединиться устройство A. Злоумышленник E выполняет алгоритм Диффи-Хеллмана с устройством A и устанавливает секретный ключ Kae с устройством A. Аналогичным образом злоумышленник маскируется под устройство A для устройства B и устанавливает секретный ключ Kbe с устройством B. Когда сообщение приходит с одного из устройств A или B, злоумышленник расшифровывает сообщение при помощи одного секретного ключа, шифрует его другим и отправляет на другое устройство. Таким образом, устройства A и B не замечают ничего странного в своем обмене сообщениями, кроме некоторой дополнительной задержки. Когда они проверяют свою связь посредством отправки одной и той же информации с использованием другого способа связи и сравнения результатов, они не заметят никакого вмешательства в их связь. Но злоумышленник полностью осведомлен о том, какой информацией они обмениваются.
В протоколе инициализации устройства [DPP] первым шагом является выполнение начальной загрузки DPP, т.е. процедуры по обеспечению уверенности в достоверности открытого ключа начальной загрузки другого устройства и в том, что он не является открытым ключом устройства, применяющего технологию "незаконного посредника". Одним из способов начальной загрузки является сканирование QR-кода, содержащего открытый ключ начальной загрузки другого устройства, который отображается или напечатан на другом устройстве. Другое устройство также может сканировать QR-код первого устройства (взаимная аутентификация). После этого ключ(-и) начальной загрузки используют в протоколе аутентификации DPP, где проверяют, имеет ли другое устройство также закрытый ключ, принадлежащий открытому ключу начальной загрузки. Если бы обмен открытыми ключами начальной загрузки в DPP производился через Wi-Fi (любая форма Wi-Fi, например стандарт Neighbor Awareness Networking [NAN]), им нельзя было бы доверять, поскольку они могли быть отправлены любым устройством в пределах радиочастотного диапазона. В продолжение работы с DPP протокол аутентификации DPP привел бы к установке общего ключа Ke коллективного пользования, но устройство не знает, совместно используют ли они этот ключ с предполагаемым устройством или с устройством, применяющим технологию "незаконного посредника". Аналогичным образом, при использовании оппортунистического беспроводного шифрования (Opportunistic Wireless Encryption [OWE]), когда открытыми ключами обмениваются через Wi-Fi и с использованием метода Диффи-Хеллмана, устанавливают общий ключ коллективного пользования для шифрования последующей связи между двумя устройствами.
Однако способ ограничения вероятности создания общего ключа коллективного пользования с устройством, применяющим технологию "незаконного посредника", состоит в том, что устройства измеряют расстояние до другого устройства, и если оно меньше определенного расстояния, заданного правилом в устройстве или его пользователем, например пара метров, они доверяют открытому ключу, полученному от другого устройства. В этом случае пользователь будет знать, что устройство, которое отправило открытый ключ по Wi-Fi, будь то предполагаемое устройство или устройство, применяющее технологию "незаконного посредника", находится на расстоянии меньше предельного расстояния. Затем пользователь может решить, есть ли в этом диапазоне какие-либо другие устройства, кроме предполагаемого.
Ограничение вероятности установки общего ключа коллективного пользования с устройством, применяющим технологию "незаконного посредника", с использованием измерения расстояния может быть выполнено посредством сначала обмена открытыми ключами по Wi-Fi, а затем вычисления общего сеансового ключа, например, при помощи OWE или части протокола аутентификации DPP (где начальная загрузка DPP выполняется по Wi-Fi, например Wi-Fi Aware) и последующего выполнения процедуры FTM при помощи шифрованных кадров FTM_X с использованием общего сеансового ключа, определенного при помощи оппортунистического беспроводного шифрования [OWE] или DPP, или каким-либо другим способом, или по меньшей мере посредством шифрования полей, содержащих значения t1 и t4 в кадрах FTM_X. Если измеренное таким образом расстояние до Запрашивающей STA меньше x метров, Инициирующая STA может доверять полученному открытому ключу и может продолжить обмен данными с другим устройством с использованием согласованного сеансового ключа. В случае DPP дальнейший обмен данными будет проходить в соответствии с протоколом конфигурации DPP. В случае OWE это будет шифрованное соединение WAN между AP и STA. Инициирующая STA может также спросить пользователя, уверен ли он, что существует только одно устройство Wi-Fi в пределах расстояния, измеренного до Отвечающей STA, и если пользователь подтверждает это, Инициирующая STA переходит к использованию общего сеансового ключа.
Как описано выше, у Отвечающей STA может быть причина заставить Инициирующую STA поверить, что она находится на другом расстоянии, чем есть на самом деле. В частности, Отвечающая STA может заставить Инициирующую STA считать, что она находится ближе, чем она есть на самом деле, за счет уменьшения значений t4_X и/или увеличивая значений t1_x. Это легко видно из уравнения (11-5) из [802.11].
RTT = [ (t4_X - t1_X) - (t3_X - t2_X) ] (3)
Расстояние между двумя устройствами составляет
d = c * RTT / 2 (4)
где c - скорость света (около 3*108 м/с) Если все измерения были выполнены и сообщены точно, вычисленное расстояние d будет соответствовать реальному расстоянию d в пределах точности измерения.
Для уменьшения расстояния, измеренного Инициирующей STA, на 1 метр Отвечающая STA должна уменьшить разницу t4_Z и t1_X от их измеренных значений примерно на
delta_t = 2 * 1 м / 3*10^8 м/с = 2 * 3,33*10-9 с = 6,66 нс (5)
Однако Отвечающая STA должна быть осторожна, чтобы не уменьшить разницу t4_X и t1_X слишком сильно от их измеренных значений при сообщении их Инициирующей STA, так как Инициирующая STA в этом случае будет измерять отрицательное RTT. Инициирующая STA будет измерять время прохождения сигнала в прямом и обратном направлениях, равное 0, когда разность сообщаемых t4_Z и t1_X равна времени реакции Инициирующей STA, т.е. разнице между t3_X и t2_X. Следовательно, для успешного мошенничества важно, чтобы Отвечающая STA знала разницу между t3_X и t2_X Инициирующей STA.
Как объяснено выше, разница между t3_X и t2_X Инициирующей STA состоит из двух частей: длины отправленного кадра FTM PHY (Lftm) и времени R реакции. Отвечающая STA сама отправила кадр FTM, поэтому знает его длину Lftm во времени. Время R реакции может быть известно Отвечающей STA множеством способов.
Предположим, что мошенническое устройство каким-то образом знает реальное расстояние до Инициирующей STA и, следовательно, может точно имитировать расстояние, которое Инициирующая STA будет измерять, путем адаптации сообщаемых t1 и t4. Таким образом, проблема с выполнением измерений с использованием FTM, как описано выше, заключается в том, что вредоносная Отвечающая STA может манипулировать своими сообщенными значениями t1 и t4 времени прихода таким образом, чтобы она могла казаться ближе к Инициирующей STA или дальше от нее, чем она есть на самом деле.
Для предотвращения успешной фальсификации расстояния инициирующее устройство может задействовать одно или более взаимодействующих устройств, которые находятся в известном положении по отношению к инициирующему устройству. Инициирующее устройство и взаимодействующее(-ие) устройство(-а) используют направленную приемную антенну, так что они выполнены с возможностью измерения направления входящего радиочастотного сигнала относительно системы координат, которая связана по меньшей мере с ориентацией по отношению друг к другу. В этом документе такая связь называется совместным использованием направления соединения. Направление соединения указывает на направление линии, соединяющей инициирующее устройство и взаимодействующее устройство.
Взаимодействующие устройства могут использовать часы, синхронизированные с часами в инициирующем устройстве, или могут совместно использовать какую-либо другую временную ссылку. Взаимодействующее(-ие) устройство(-а) независимо измеряет время прихода сообщений об измерениях и сообщает о нем инициирующему устройству. Инициирующее устройство использует свойства треугольников, чтобы попытаться обнаружить манипуляции с измерениями времени прихода со стороны мошеннического отвечающего устройства. Для систем на основе 3GPP инициирующее устройство и одно или более взаимодействующих устройств могут быть реализованы базовыми станциями, а отвечающее устройство реализовано оборудованием UE пользователя.
За счет обеспечения более надежного измерения на основе расстояния оно становится пригодным инструментом для надежных услуг на основе близости. Вот некоторые примеры использования:
- Если вы подключаетесь к близкой беспроводной клавиатуре, близкому беспроводному устройству хранения данных, близкому датчику или близкой беспроводной веб-камере, вы должны быть уверены, что подключаетесь к правильному устройству, а не к какому-то устройству, применяющему технологию "незаконного посредника", которое хочет контролировать, копировать или отслеживать то, что вы делаете.
- Если вы встречаетесь со своим другом и хотите подключиться к его мобильному телефону для обмена фотографиями, вы должны быть уверены, что подключаетесь к телефону своего друга, а не к устройству, применяющему технологию "незаконного посредника".
- Если в доме или магазине вы хотите автоматически включать некоторые устройства, открывать дверь или разрешать человеку подключаться к какой-либо услуге при помощи его мобильного устройства, находясь в непосредственной близости, вы должны убедиться, что местоположение этого мобильного устройства является правильным, и что это не поддельное устройство, заявляющее, что находится рядом.
- Если в магазине вы хотите инициировать транзакцию, например, когда находитесь рядом с кассовым аппаратом, вы должны быть уверены, что не подвергаетесь фишинговой атаке, когда пользователь может не знать об этом и подключиться к фишинговому устройству, расположенному дальше, вместо официальной услуги, предоставляемой магазином.
На Фиг. 1 изображено устройство для беспроводной связи и измерения расстояния. Пространственная совокупность 100 устройств для беспроводной связи содержит первое устройство 110 и второе устройство 120, причем устройства физически разнесены друг от друга на расстояние 151. Первое устройство имеет первый приемопередатчик 111 для передачи и приема сообщений и первый процессор 112 сообщений. Второе устройство имеет беспроводной приемник 121 или второй приемопередатчик и второй процессор 122 сообщений. Кроме того, третье устройство имеет третий приемопередатчик 131 и третий процессор 132 сообщений. Устройства оборудованы для беспроводной связи при помощи направленных антенн 113, 123, 133, подключенных к приемопередатчикам 111, 121, 131.
Устройства выполнены с возможностью измерения расстояния посредством беспроводной связи в соответствии с протоколом измерения расстояния между первым устройством и вторым устройством для определения расстояния между первым и вторым устройствами, как более подробно описано ниже. Беспроводная связь включает в себя протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве. Протокол может включать в себя передачу сообщения об измерении вторым устройством. В примерах беспроводная связь и протокол измерения дальности соответствуют [802.11], но также могут быть использованы другие беспроводные протоколы, такие как Bluetooth, где обеспечен соответствующий протокол измерения дальности на основании измерения времени прихода.
Первый процессор 112 сообщений выполнен с возможностью обработки сообщений в соответствии с протоколом измерения дальности и возможностью определения первого времени прихода сообщения об измерении на первом устройстве, а также возможностью определения первого расстояния 151 между первым устройством и вторым устройством на основании первого времени прихода. Кроме того, первый процессор сообщений выполнен с возможностью обмена данными с третьим устройством 130. Третье устройство действует в качестве взаимодействующего устройства и расположено на достоверном расстоянии 150 от первого устройства. Кроме того, взаимодействующее устройство использует направление 160 соединения совместно с первым устройством, направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство. Совместное использование означает, что и первое, и третье устройство знают это направление соединения как опорное направление, которое может быть использовано для определения углов и представляет собой систему координат, которая доступна для обоих устройств. Достоверное расстояние и направление соединения могут быть заданы или могут быть измерены отдельно, или могут быть введены пользователем. Достоверное расстояние и направление соединения известны первому устройству и считаются надежными. При необходимости первый процессор сообщений выполнен с возможностью определения достоверного расстояния в соответствии с протоколом измерения дальности, выполняемым третьим устройством. Перед фактическими измерениями на втором устройстве может быть определено достоверное расстояние с использованием того же или другого протокола измерения дальности. Кроме того, первый процессор сообщений может быть выполнен с возможностью определения направления 160 соединения с использованием первой направленной антенны 113.
Третье устройство взаимодействует для определения третьего направления при приеме указанного того же сообщения об измерении на третьем устройстве. В третьем устройстве, также называемом взаимодействующим устройством, третий процессор 132 сообщений выполнен с возможностью указанного определения третьего направления и передачи данных поддержки на первое устройство, причем данные поддержки основаны на третьем направлении. Например, данные поддержки могут содержать данные о третьем направлении относительно опорного направления, направления 160 соединения или абсолютной сетки направлений или относительно какого-либо другого направления, определенного при приеме дополнительного сообщения, также принимаемого первым устройством. В альтернативном или дополнительном варианте данные поддержки могут содержать данные о третьем угле, причем третье устройство выполнено с возможностью определения третьего угла 163 между третьим направлением и направлением соединения.
Первый процессор сообщений для оценки определенного расстояния выполнен с возможностью определения первого направления при приеме сообщения об измерении на первом устройстве, возможностью определения первого угла 161 между первым направлением и направлением соединения и возможностью приема данных поддержки от взаимодействующего устройства. После приема данных поддержки процессор определяет третий угол 163 между третьим направлением и направлением соединения с использованием данных поддержки. Затем выполняют проверочный тест на первом расстоянии, достоверном расстоянии, а также на первом угле и третьем угле. Проверочный тест может принимать первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства. Например, проверочный тест включает проверку по теореме косинусов или проверку по неравенству треугольника для приемлемой пространственной совокупности, как дополнительно объяснено далее. Целью проверки является доказательство того, может ли реальная пространственная совокупность треугольника иметь соответствующие углы и длины сторон в соответствии с определенными углами и расстояниями.
Протокол измерения дальности может включать в себя обмен сообщениями, которые криптографически защищены на основании данных ключа. При необходимости первый процессор сообщений выполнен с возможностью совместного использования данных ключа с взаимодействующим устройством для обеспечения возможности третьему процессору сообщений криптографически обрабатывать сообщения в соответствии с протоколом измерения дальности. Шифрование сообщений между первым и третьим устройствами в соответствии с протоколом беспроводной связи, известным как таковой, защищает такие сообщения от подделки потенциально вредоносным вторым устройством.
При необходимости устройство может иметь часовой блок для обеспечения временной ссылки для определения указанного времени прихода. Первый процессор сообщений может быть выполнен с возможностью синхронизации временной ссылки с соответствующим часовым блоком во взаимодействующем устройстве, например синхронизирован с протоколом из [802.1AS]. Фактически, временная ссылка может совместно использоваться первым и третьим устройствами. Третье время прихода может быть определено относительно временной ссылки, что позволяет данным поддержки содержать третье время прихода, определенное таким образом, и использоваться в таковом качестве первым устройством.
При необходимости третий процессор 132 сообщений выполнен с возможностью определения третьего времени прихода сообщения об измерении на третьем устройстве, причем данные поддержки также основаны на третьем времени прихода. Первый процессор 112 сообщений выполнен с возможностью определения третьего расстояния 153 между третьим устройством и вторым устройством с использованием данных поддержки, касающихся третьего времени прихода, и возможностью выполнения проверочного теста также с использованием третьего расстояния. В альтернативном или дополнительном варианте данные поддержки могут содержать третьи данные о расстоянии. Кроме того, третье устройство может быть выполнено с возможностью определения данных о третьем времени прихода или третьего расстояния между третьим устройством и вторым устройством, например, с использованием дополнительных полученных сообщений и достоверного расстояния.
Далее описано, как и в какой степени добавление одной или более Взаимодействующих STA может помочь обнаружить, что Отвечающие STA хотят казаться находящимися ближе к Инициирующей STA, чем они есть на самом деле. Могут быть применены следующие допущения:
• Отвечающая STA знает, как отрегулировать измерения, о которых она сообщает Инициирующей STA, чтобы казаться находящейся на любом расстоянии от Инициирующей STA;
• Инициирующая STA и Взаимодействующая(-ие) STA могут иметь свои часы, с помощью которых они измеряют время прихода и отправления физических кадров, синхронизированных с протоколом 802.1AS [802.1AS], или обмениваются данными иным образом, так чтобы Инициирующая STA знала, какие измерения Взаимодействующей(-их) STA комбинировать с какими своими собственными измерениями;
• Инициирующая STA и Взаимодействующая(-ие) STA обмениваются информацией, необходимой для Взаимодействующей(-их) STA, так чтобы Взаимодействующая(-ие) STA могла принимать, идентифицировать и при необходимости дешифровать сообщения FTM(,) от Отвечающей STA, так что Взаимодействующая(-ие) STA может определять направление или угол прихода сообщений FTM(,) от Отвечающей STA и сообщать о направлении или угле Инициирующей STA, так чтобы Инициирующая STA могла комбинировать сообщенные данные о направлении или угле со своими собственными измерениями тех же сообщений;
• измерения FTM могут быть выполнены более одного раза, а измеренные и зарегистрированные значения времени t1, t2, t3 и t4 всех STA могут быть усреднены вначале, прежде чем они будут использованы при вычислениях расстояния и местоположения, так что точность измерения будет достаточно хорошей для надежных результатов.
Ниже описана хорошая защита от сильной атаки для STA, которая может измерять время. В такой защите Инициирующая STA работает вместе с одной или более Взаимодействующими STA и применяет неравенство треугольника, как показано, и в случае двух или более Взаимодействующих STA применяет проверки несоответствия в вычисленных положениях. Подробные примеры приведены с использованием протокола FTM [802.11]. Однако это так же хорошо работает с технологией измерения дальности с использованием Wi-Fi, Bluetooth или любой другой беспроводной (также оптической) технологии, когда одно устройство сообщает другому устройству о времени прихода, времени отправления протокольных сообщений или их разнице.
Примеры, описанные ниже со ссылкой на Фиг. 2, 3 и 4, сосредоточены на измеренных расстояниях. Кроме того, углы могут быть определены, как описано выше со ссылкой на Фиг. 1. В практических вариантах осуществления проверочного теста и определенные углы, и расстояния могут быть проверены с использованием геометрических свойств пригодных пространственных совокупностей участвующих устройств, таких как треугольники. Приведенные ниже примеры основаны на треугольниках и неравенстве треугольника. Примеры с Фиг. 5 и 6 описывают с использованием определенных углов в проверочном тесте.
На Фиг. 2 изображена пространственная совокупность устройства для беспроводной связи и взаимодействующего устройства. Совокупность 200 включает в себя первое устройство 210, называемое инициирующей STA, второе устройство 220, называемое отвечающей STA, и третье устройство 230, называемое взаимодействующей STA, аналогично устройствам, описанным со ссылкой на Фиг.1. Первое расстояние d1_c определено между первым устройством 210 и вторым устройством 220, которые находятся на реальном расстоянии d1 (или d). Третье расстояние d2_с определено между третьим устройством 230 и вторым устройством 220, которые находятся на реальном расстоянии d2. Достоверное расстояние L находится между первым устройством 210 и третьим устройством 230.
В этом примере реальное расстояние от мошеннической Отвечающей STA до Инициирующей STA равно d, что также является расстоянием от мошеннической Отвечающей STA до Взаимодействующей STA. Инициирующая STA выполняет измерение расстояния до мошеннической Отвечающей STA любым из способов, описанных выше. В остальном предполагается протокол FTM.
Для каждого измерения расстояния Инициирующая STA запрашивает у Взаимодействующей STA, что она измерила как время t2_X прихода физического кадра FTM (t1_X, t4_X), который отправила мошенническая Отвечающая STA. Расстояния с добавленным _c представляют собой соответствующие расстояния, вычисленные устройством.
Затем Инициирующая STA вычисляет расстояние d как обычно:
RTT = [ (t4_X - t1_X) - (t3_X - t2_X) ] (6)
Расстояние между двумя устройствами составляет
d1_c = c * RTT / 2 = c * [ (t4_X - t1_X) - (t3_X - t2_X) ] / 2 (7)
где c - скорость света (около 3*108 м/с) Если все измерения были выполнены и сообщены точно, вычисленное расстояние d1_c будет соответствовать реальному расстоянию d в пределах точности измерения.
Предположим, что мошенническая Отвечающая STA хочет, чтобы Инициирующая STA думала, что она находится на сфальсифицированном расстоянии f вместо d. Мошенническая Отвечающая STA измерила t4_X и t1_X. В этой связи, Отвечающая STA изменяет значения t4_r_X и t1_r_X, о которых она сообщает, так что их разница составляет 2 * ( d - f ) / c, меньше чем разница реально измеренных t4_X и t1_X. Следовательно, значения времени, о которых мошенническая Отвечающая STA сообщает Инициирующей STA, составляют
(t4_r_X, t1_r_X) = ( t4_X - (1 - α )*(2*(d - f ) / c ), t1_X + α *(2*(d - f ) / c ) ) (8)
где α может быть выбрана произвольно.
Используя (t4_r_X, t1_r_X), о которых сообщила Отвечающая STA, Инициирующая STA может вычислить расстояние d1_c между Отвечающей STA и собой как
d1_c = c * RTT / 2
= c * [ ( t4_X - (1 - α )*(2*(d - f ) / c ) - (t1_X + α *(2*(d - f ) / c )) ) - (t3_X - t2_X) ] / 2
= c * [ (t4_X - t1_X) - (t3_X - t2_X) - (2*(d - f ) / c ) ] / 2
= c * [ (t4_X - t1_X) - (t3_X - t2_X) ] / 2 - c * (2*(d - f ) / c ) / 2
= d - (d - f )
= f (9)
Это вычисленное расстояние действительно является тем, что мошенническая Отвечающая STA хотела, чтобы Инициирующая STA вычислила.
Используя (t4_r_X, t1_r_X), о которых сообщила Отвечающая STA, и t2c_X, полученное от Взаимодействующей STA, Инициирующая STA может вычислить расстояние d2_c между Отвечающей STA и Взаимодействующей STA как
d2_c = d1_c + c * (t2c_X - t2_X) (10)
Для любого треугольника со сторонами A, B и C должно выполняться следующее неравенство (неравенство треугольника)
|C| ≤ |A| + |B| (11)
Следовательно, в совокупности на Фиг. 2 следующие два неравенства должны выполняться как для реальных расстояний, так и для расстояний, измеренных Инициирующей STA.
L ≤ d1 + d2 ⇔ (12)
L ≤ 2 * d1 + c * (t2c_X - t2_X) (13)
Инициирующая STA может проверить, выполняются ли два вышеприведенных неравенства для измеренных расстояний d1_c и d2_c.
L ≤ d1_c + d2_c ⇔ (14)
L ≤ d1_c + d1_c + c * (t2c_X - t2_X) ⇔ (15)
L ≤ 2 * f + c * (t2c_X - t2_X) (16)
В совокупности по Фиг. 2 d1 и d2 равны, так что t2c_X и t2_X равны. Это означает, что неравенство f (16) больше не будет выполняться, если мошенническая Отвечающая STA выберет f следующим образом:
f < L / 2 (17)
Это означает, что в совокупности по Фиг. 2 Инициирующая STA может обнаружить, что Отвечающая STA фальсифицировала свои измерения с тем, чтобы казаться находящейся ближе, чем L/2, к Инициирующей STA.
На Фиг. 3 изображена пространственная совокупность из двух устройств для беспроводной связи. Совокупность 300 включает в себя первое устройство 310, называемое инициирующей STA, второе устройство 320, называемое отвечающей STA, и третье устройство 330, называемое взаимодействующей STA, аналогично устройствам, описанным со ссылкой на Фиг.1. Первое расстояние d1_c определено между первым устройством 310 и вторым устройством 320, которые находятся на реальном расстоянии d1 (или d). Третье расстояние d2_с определено между третьим устройством 330 и вторым устройством 320, которые находятся на реальном расстоянии d2. Достоверное расстояние L находится между первым устройством 310 и третьим устройством 330.
В примере Инициирующая STA измеряет f как расстояние до мошеннической Отвечающей STA и определяет f - L как расстояние между Взаимодействующей STA и мошеннической Отвечающей STA.
Теперь неравенство (14) будет выглядеть следующим образом
L ≤ d1_c + d2_c ⇔ (18)
L ≤ 2 * f - L ⇔ (19)
L ≤ f (20)
что выполняется, только если f больше или равно L. Следовательно, предложенная защита работает для совокупности, представленной на Фиг. 3, и Инициирующая STA может обнаружить, что Отвечающая STA фальсифицировала свои измерения с тем, чтобы казаться расположенной ближе, чем L, к Инициирующей STA.
На Фиг. 4 изображена еще одна пространственная совокупность двух устройств для беспроводной связи. Совокупность 400 включает в себя первое устройство 410, называемое инициирующей STA, второе устройство 420, называемое отвечающей STA, и третье устройство 430, называемое взаимодействующей STA, аналогично устройствам, описанным со ссылкой на Фиг.1. Первое расстояние d1_c определено между первым устройством 410 и вторым устройством 420, которые находятся на реальном расстоянии d1 (или d). Третье расстояние d2_с определено между третьим устройством 430 и вторым устройством 420, которые находятся на реальном расстоянии d2. Достоверное расстояние L находится между первым устройством 410 и третьим устройством 430.
В примере использована теорема косинусов. d2 вычисляется как
d22 = d12 + L2 - 2 * d1 * L * cos(ϕ) (21)
Устанавливая соотношение между d1 и L с использованием α следующим образом
d1 = α* L (22)
получаем
d2 = √ ( (α * L)2 + L2 - 2 * α * L * L * cos(ϕ) )
= L * √( α 2 + 1 - 2 * α * cos(ϕ) ) (23)
Однако мошенническая Отвечающая STA изменяет информацию, отправляемую на Инициирующую STA, так что расстояния d1_c и d2_c, которые получает Инициирующая STA, становятся
d1_c = d1 - (d1 - f) (24)
d2_c = d2 - (d1 - f) (25)
Инициирующая STA проверяет, выполняется ли неравенство (14) для расстояний, которые она измерила
L ≤ d1_c + d2_c ⇔ (26)
L ≤ f + L * √( α 2 + 1 - 2 * α * cos(ϕ) ) - α * L + f ⇔ (27)
L ≤ 2 * f + L * { √( α 2 + 1 - 2 * α * cos(ϕ) ) - α } ⇔ (28)
f ≥ 0,5 * L * { 1 + α - √( α 2 + 1 - 2 * α * cos(ϕ) ) } (29)
Следовательно, Инициирующая STA обнаружит Отвечающую STA, которая подделывает свои сообщаемые измерения, когда Отвечающая STA выбирает f как в следующем неравенстве.
f / L < 0,5 * { 1 + α - √( α 2 + 1 - 2 * α * cos(ϕ) ) } = T1 (30)
На Фиг. 5 изображена пространственная совокупность, указывающая на определенные углы. Совокупность 500 включает в себя первое устройство 510, называемое инициирующей STA, второе устройство 520, называемое отвечающей STA, и третье устройство 530, называемое взаимодействующей STA, аналогично устройствам, описанным со ссылкой на Фиг.1. Первое расстояние d1_c определено между первым устройством 510 и вторым устройством 520, которые находятся на реальном расстоянии d1 (или d). Третье расстояние d2_с определено между третьим устройством 530 и вторым устройством 520, которые находятся на реальном расстоянии d2. Достоверное расстояние L находится между первым устройством 510 и третьим устройством 530. Направление соединения представляет собой направление вдоль линии между первым и третьим устройствами. Первый угол ϕ1 определен между направлением соединения и направлением приема сообщения об измерении на первом устройстве от второго устройства. Второй угол ϕ3 находится между направлением приема сообщения от второго устройства на первом устройстве и направлением приема сообщения об измерении на третьем устройстве. Третий угол ϕ2 находится между направлением соединения и направлением приема сообщения об измерении на третьем устройстве от второго устройства.
Реальное расстояние от Отвечающей STA до Инициирующей STA представляет собой d. Инициирующая STA выполняет измерение расстояния до Отвечающей STA любым из способов, описанных выше. В остальном будем предполагать, что это протокол FTM.
Инициирующая STA вычисляет расстояние d1_c как обычно:
RTT = [ (t4_X - t1_X) - (t3_X - t2_X) ] (31)
Расстояние между двумя устройствами составляет
d1_c = c * RTT / 2 = c * [ (t4_X - t1_X) - (t3_X - t2_X) ] / 2 (32)
где c - скорость света (около 3*108 м/с). Если все измерения были выполнены и сообщены точно, вычисленное расстояние d1_c будет соответствовать реальному расстоянию d в пределах точности измерения.
Предположим, что мошенническая Отвечающая STA хочет, чтобы Инициирующая STA думала, что она находится на сфальсифицированном расстоянии f вместо реального расстояния d. Мошенническая Отвечающая STA измерила t4_X и t1_X. В этой связи, Отвечающая STA изменяет значения t4_r_X и t1_r_X, о которых она сообщает, так что их разница составляет 2 * (d - f) / c, меньше чем разница реально измеренных t4_X и t1_X. Следовательно, значения времени, о которых мошенническая Отвечающая STA сообщает Инициирующей STA, составляют
(t4_r_X, t1_r_X) = ( t4_X - (1 - α )*(2*(d - f ) / c ), t1_X + α *(2*(d - f) / c ) ) (33)
где α может быть выбрана произвольно.
Используя (t4_r_X, t1_r_X), о которых сообщила Отвечающая STA, Инициирующая STA может вычислить расстояние d1_c между Отвечающей STA и собой как
d1_c = c * RTT / 2
= c * [ ( t4_X - (1 - α )*(2*(d - f ) / c ) - (t1_X + α *(2*(d - f ) / c))) - (t3_X - t2_X) ] /2
= c * [ (t4_X - t1_X) - (t3_X - t2_X) - (2*(d - f ) / c ) ] / 2
= c * [ (t4_X - t1_X) - (t3_X - t2_X) ] / 2 - c * (2*(d - f ) / c ) / 2
= d - (d - f )
= f (34)
Это вычисленное расстояние действительно является тем, что мошенническая Отвечающая STA хотела, чтобы Инициирующая STA вычислила.
Для каждого измерения расстояния Инициирующая STA запрашивает у Взаимодействующей STA, что она измерила как угол ϕ2 прихода физического кадра FTM (t1_X, t4_X), который отправила мошенническая Отвечающая STA. Посредством использования угла ϕ2 прихода, о котором сообщила Взаимодействующая STA, угла ϕ1 прихода, который она сама измерила, и закона синусов Инициирующая STA может вычислить расстояние d1 между Отвечающей STA и собой. Сначала она вычисляет ϕ3, угол между линией от Отвечающей STA к Инициирующей STA и линией от Отвечающей STA к Взаимодействующей STA.
ϕ3 = 180 - ϕ1 - ϕ2 (35)
Закон синусов для совокупности на Фиг. 5 следующий.
L / sin( ϕ3 ) = d2 / sin( ϕ1 ) = d1 / sin( ϕ2 ) (36)
Затем Инициирующая STA использует закон синусов для вычисления расстояния d1_a до Отвечающей STA в соответствии с измеренными углами как
d1_a = L * sin( ϕ2 ) / sin( ϕ3 ) (37)
Когда расстояние d1_c, вычисленное на основании измерений времени прихода и отправления, слишком сильно отличается от расстояния d1_a, вычисленного на основании измеренных углов прихода, Инициирующая STA отбраковывает измеренные расстояния.
Погрешности измерения времени и погрешности измерения угла могут быть уменьшены путем выполнения протокола FTM несколько раз и усреднения t1_X, t2_X, t3_X, t4_X, al ϕ1_X2 и ϕ2_X каждого выполнения X перед их использованием в уравнениях (35) - (37).
Чем меньше ϕ3, тем больше погрешность в d1_a. Для достижения наилучших результатов ϕ1 должно быть в диапазоне [45-135] градусов и | ϕ3 | должно быть не менее 45 градусов.
Следовательно, для обнаружения мошеннических Отвечающих STA с большего количества направлений следует использовать две или более Взаимодействующих STA. Например, с тремя Взаимодействующими STA, например, в совокупности по Фиг. 6 можно охватить все направления.
Если Инициирующая STA обнаруживает, что расстояние d1_c, вычисленное на основании измерений времени прихода и отправления, совпадает с расстоянием d1_a, вычисленным на основании измеренных углов прихода, и, таким образом, не отбраковывает измеренные расстояния, Инициирующая STA может комбинировать d1_c и d1_a для повышения точности (уменьшения погрешности) измерения расстояния между Инициирующей STA и Отвечающей STA. Это более точное окончательное расстояние d1_f между Инициирующей STA и Отвечающей STA может быть вычислено согласно уравнению (38), где вычисляется средневзвешенное значение d1_c и d1_a с использованием весовых коэффициентов c и a. Эти весовые коэффициенты могут быть взяты пропорциональными точности, с которой измеряют d1_c и d1_a, что означает, что чем точнее конкретное измерение (или чем меньше его погрешность), тем больше должен быть весовой коэффициент. Если и d1_c, и d1_a измеряют с одинаковой точностью, весовые коэффициенты c и a могут быть взяты одинаковыми, что приведет к нормальному среднему значению.
d1_f = c * d1_c + a * d1_a / ( c + a) (81)
На Фиг. 6 изображена совокупность инициирующего устройства и трех взаимодействующих устройств. Совокупность 600 схематично в трехмерном виде показывает первое устройство 610, называемое инициирующей STA, и третье устройство 630, называемое первой взаимодействующей STA1, дополнительное устройство 631, называемое второй взаимодействующей STA2, и еще одно устройство 632, называемое третьей взаимодействующей STA3. Отвечающее устройство не показано. Эти устройства аналогичны устройствам, описанным со ссылкой на Фиг. 1. На Фигуре соответствующие достоверные расстояния между инициирующим устройством и взаимодействующими устройствами сделаны равными, как обозначено буквой L, тогда как все углы равны 90°, что упрощает вычисление расстояний и углов. Однако на практике достоверные расстояния и направления соединения могут быть разными и при этом составлять пригодную трехмерную компоновку для измерений. Соответствующие вычисления могут быть адаптированы для учета фактических соответствующих достоверных расстояний и направлений.
Направление соединения представляет собой направление вдоль линии между инициирующем устройством 610 и первым взаимодействующим устройством 630. Второе направление соединения представляет собой направление вдоль линии между инициирующем устройством 610 и вторым взаимодействующим устройством 631. Третье направление соединения представляет собой направление вдоль линии между инициирующем устройством 610 и третьим взаимодействующим устройством 632. Между каждым направлением соединения указаны углы 90°.
Предлагаемая система измерения расстояний может быть использована, например, с глобальной навигационной спутниковой системой с поддержкой (A-GNSS), которая представляет собой технологию, посредством которой сервер определения местоположения предоставляет вспомогательные данные для обеспечения A-GNSS на основе UE и с поддержкой UE. Местоположения, измеренные с помощью системы GNSS, могут быть улучшены с использованием данных A-GNSS, например, для компенсации систематических погрешностей. A-GNSS также может быть использована для определения причин конкретных погрешностей позиционирования GNSS. Сервер определения местоположения может предоставлять вспомогательные данные для любого типа GNSS (например, GPS, Galileo, GLONASS, BDS и т.д.). Для таких способов определения местоположения, в которых возможное мошенническое устройство само измеряет свое положение и сообщает об измеренном положении сообщением, или возможное мошенническое устройство измеряет другие параметры (например, атмосферное давление или мощность принимаемого сигнала нескольких базовых станций, точек доступа Wi-Fi или радиомаяков Bluetooth или время прохождения сигнала в прямом и обратном направлениях до нескольких базовых станций, точек доступа Wi-Fi или радиомаяков Bluetooth), о которых сообщают одному из взаимодействующих устройств, сообщаемое положение или положение, полученное в результате сообщаемых измерений, сравнивают с положением возможного мошеннического устройства, которое может быть определено путем комбинирования измерений углов взаимодействующих устройств. Комбинирование измерений углов для измерения положения может, например, быть выполнено с использованием совокупности по Фиг. 6 путем определения, на основании положения каждого взаимодействующего устройства в трехмерном пространстве и измеренного им угла относительно возможного мошеннического устройства, линии для каждого взаимодействующего устройства в трехмерном пространстве, на которой находится возможное мошенническое устройство. Посредством вычисления точки пересечения каждой возможной пары этих линий и, например, посредством усреднения этих точек пересечения взаимодействующие устройства могут измерять положение возможного мошеннического устройства на основании измеренных углов.
Базовые станции в 3GPP осуществляют прием и передачу в частотно-временной сетке так называемых ресурсных элементов. Некоторые положения в частотно-временной сетке зафиксированы стандартом 3GPP и используются для широковещательной передачи системной информации на все UE в зоне действия базовой станции, например информации о том, когда и на каких частотах базовая станция будет отправлять что-то на конкретное UE (нисходящая линия связи), и когда и на каких частотах конкретное UE может отправлять что-то на базовую станцию (восходящая линия связи) или на конкретное другое UE (боковая линия связи). Когда базовые станции взаимодействуют в соответствии, например, с совокупностью по Фиг. 6, их частотно-временные сетки должны быть выровнены и синхронизированы, и каждая из них должна обеспечить доступность одних и тех же частотно-временных положений (ресурсных элементов) в сетке, так чтобы все они могли измерять угол приема одного и того же сообщения от одного и того же UE.
Таким образом, предложенная система измерения расстояний может быть расширена за счет использования по меньшей мере одного дополнительного взаимодействующего устройства. Ниже приведены дополнительные примеры. В такой системе четвертое устройство, действующее в качестве второго взаимодействующего устройства, расположено на втором достоверном расстоянии от первого устройства, причем взаимодействующее устройство использует второе направление соединения совместно с первым устройством, и второе направление соединения указывает на направление линии, соединяющей первое устройство и второе взаимодействующее устройство. Четвертое устройство может иметь четвертый беспроводной приемник для приема сообщений, причем приемник содержит четвертую направленную антенну для обнаружения направления принятого сигнала, несущего сообщение. Четвертое устройство имеет четвертый процессор сообщений, выполненный с возможностью определения четвертого направления при приеме сообщения об измерении на четвертом устройстве и передачи четвертых данных поддержки на первое устройство, причем четвертые данные поддержки указывают на четвертое направление. Первый процессор сообщений выполнен с возможностью приема четвертых данных поддержки от второго взаимодействующего устройства, и определения четвертого угла между четвертым направлением и вторым направлением соединения на основании четвертых данных поддержки. Первый процессор сообщений выполнен с возможностью проведения проверочного теста также с использованием второго достоверного расстояния и четвертого угла.
В варианте осуществления в проверочном тесте используют комбинацию первого неравенства треугольника в первой пространственной совокупности из первого устройства, второго устройства и третьего устройства и второго неравенства треугольника во второй пространственной совокупности из первого устройства, второго устройства и четвертого устройства. Проверочный тест может включать тесты, описанные в разделе об использовании неравенства треугольника и двух Взаимодействующих STA ниже. В альтернативном варианте в проверочном тесте могут быть использованы две взаимодействующие STA, как описано в более позднем разделе, посвященном использованию неравенства треугольника и двух Взаимодействующих STA лучшим образом. Для этого расстояние между двумя взаимодействующими устройствами может быть известно первому устройству.
В варианте осуществления проверочный тест может проверять, соответствует ли первое местоположение второго устройства согласно первой пространственной совокупности второму местоположению второго устройства согласно второй пространственной совокупности. При необходимости в проверочном тесте может быть использована проверка несогласованности для определения того, все ли определенные расстояния больше нуля.
Кроме того, проверочный тест может быть основан на большем, чем первое и второе достоверные расстояния, а именно на всей совокупности из первого, третьего и четвертого устройств. Например, это может быть сделано посредством использования достоверного угла между соединительными линиями между инициирующим устройством и обоими взаимодействующими устройствами. При необходимости проверочный тест может быть основан на настройке, в которой третье устройство и четвертое устройство скомпонованы так, что достоверный угол между линией от третьего устройства к первому устройству и линией от четвертого устройства к первому устройство составляет по меньшей мере 90 градусов. При необходимости проверочный тест может быть основан на настройке, в которой третье устройство и четвертое устройство расположены напротив друг друга по отношению к первому устройству. При необходимости проверочный тест может быть основан на настройке, в которой второе достоверное расстояние соответствует достоверному расстоянию. Различные ситуации и расчеты для проверочного теста описаны в следующих разделах. В следующем примере использовано неравенство треугольника и две Взаимодействующие STA.
Дополнительная пространственная совокупность может иметь два взаимодействующих устройства. Первое достоверное расстояние L находится между первым устройством и первой взаимодействующей STA, в то время как второе достоверное расстояние L находится между первым устройством и второй взаимодействующей STA. При использовании приведенной для примера совокупности достигается лучшая производительность для 90 < ϕ ≤ 180 за счет использования второй Взаимодействующей STA точно напротив первой. В этом случае Инициирующая STA может обнаруживать многие, хотя и не все, мошеннические Отвечающие STA, которые хотят казаться ближе, чем 0,5*L.
На Фиг. 7 изображена дополнительная пространственная совокупность, содержащая два взаимодействующих устройства. Совокупность 700 включает в себя первое устройство 710, называемое инициирующей STA, второе устройство 720, называемое отвечающим устройством, и две взаимодействующие STA 730, 731, аналогично устройствам, описанным со ссылкой на Фиг. 1. Первое достоверное расстояние L находится между первым устройством и первой взаимодействующей STA, в то время как второе достоверное расстояние L находится между первым устройством и второй взаимодействующей STA. Следует отметить, что в этой конкретной совокупности второе устройство 720 может находиться в любом месте в 3d на окружности, центр которой расположен на линии, проходящей через первое, третье и четвертое устройства. Вследствие этого мы вычисляем местоположение второго устройства здесь только как 2d координату в плоскости, проходящей через первое, второе, третье и четвертое устройства.
В приведенной для примера совокупности использовано неравенство треугольника и две Взаимодействующие STA. Неравенство треугольника используется при измерениях посредством Взаимодействующих STA 1 и 2. Используя теорему косинусов, можно вычислить d2_1 как
d2_12 = L * √( α 2 + 1 - 2 * α * cos(ϕ) ) (38)
а d2_2 как
d2_22 = L * √( α 2 + 1 - 2 * α * cos(180 - ϕ) )
= L * √( α 2 + 1 + 2 * α * cos(ϕ) ) (39)
Мошенническая Отвечающая STA изменяет информацию, отправляемую ею на Инициирующую STA, так что расстояния d1_c, d2_1_c и d2_2_c, которые получает Инициирующая STA, становятся
d1_c = d1 - (d1 - f) (40)
d2_1_c = d2_1 - (d1 - f) (41)
d2_2_c = d2_2 - (d1 - f) (42)
Инициирующая STA проверяет, выполняется ли неравенство (14) для расстояний, которые она получила от Взаимодействующих STA 1 и 2
2*L ≤ d2_1_c + d2_2_c ⇔ (43)
2*L ≤ L * √( α 2 + 1 - 2 * α * cos(ϕ) ) + L * √( α 2 + 1 + 2 * α * cos(ϕ) ) - 2 * (α * L - f ) ⇔ (44)
L ≤ f + L * { √( α 2 + 1 - 2 * α * cos(ϕ) ) + √( α 2 + 1 + 2 * α * cos(ϕ) ) - 2 * α } / 2 ⇔ (45)
f ≥ 0,5 * L * { 2 + 2 * α - √( α 2 + 1 - 2 * α * cos(ϕ) ) - √( α 2 + 1 + 2 * α * cos(ϕ) ) } ⇔ (46)
Следовательно, Инициирующая STA обнаружит Отвечающую STA, которая подделывает свои сообщаемые измерения, когда Отвечающая STA выбирает f как в следующем неравенстве.
f / L < 0,5 * { 2 + 2 * α - √( α 2 + 1 - 2 * α * cos(ϕ) ) - √( α 2 + 1 + 2 * α * cos(ϕ) ) } = T3 (47)
В совокупности по Фиг. 7 можно вычислить положение (x, y) в плоскости при помощи 4 устройств несколькими способами. Если Отвечающая STA достоверно сообщает о своих измерениях, эти вычисленные положения будут совпадать, за исключением погрешностей измерения. Но они не будут совпадать, если Отвечающая STA фальсифицирует свои измерения, особенно когда она хочет казаться находящейся ближе, чем есть на самом деле.
Предположим, что Инициирующая STA находится в положении (x, y) = (0, 0), Взаимодействующая STA 1 находится в положении (L, 0) и Взаимодействующая STA 2 - в положении (-L, 0). Следует отметить, что эти STA и Отвечающая STA, конечно же, расположены в трехмерном пространстве. Плоскость (x, y) может быть любой плоскостью в 3D, где находится линия, проходящая через Инициирующую STA и две Взаимодействующие STA. Вычисления для координаты y в этом разделе должны были бы дать два значения +/- y. Сохранение только положительного решения не представляет никаких проблем, поскольку другое решение для y получается, когда плоскость поворачивается на 180 градусов вокруг линии, проходящей через Инициирующую STA и две Взаимодействующие STA.
Сначала проверяется, не являются ли расстояния, определенные Инициирующей станцией STA, больше нуля, как описано ниже в разделе "Связь между проверкой по теореме косинусов и проверкой по неравенству треугольника".
d1_c > 0 (48)
d2_1_c > 0 (49)
d2_2_c > 0 (50)
Мы предполагаем мошенническую Отвечающую STA, если не выполняется какое-либо из трех приведенных выше неравенств.
Если эти три неравенства выполняются, используем теорему косинусов
cos ( ∠ACB ) = ( |A|2 + |B|2 - |C|2 ) / ( 2 * |A| * |B| ) (51)
для 4 комбинаций ребер для вычисления положения Отвечающей STA. Всегда используем точку b как положение отвечающей STA.
Используя точку a = (L, 0) и c = (0, 0), можно измерить Отвечающую STA в положении b1 = (x1, y1)
cos_c1 = ( d1_c2 + L2 - d2_1_c2 ) / ( 2 * d1_c * L ) (52)
Используя точку a = (-L, 0) и c = (0, 0), можно измерить Отвечающую STA в положении b = (x2, y2)
cos_c2 = ( d1_c2 + L2 - d2_2_c2 ) / ( 2 * d1_c * L ) (53)
Используя точку a = (L, 0) и c = (-L, 0), можно измерить Отвечающую STA в положении b = (x3, y3)
cos_c3 = ( d2_1_c2 + 4L2 - d2_2_c2 ) / ( 2 * d2_1_c * 2L ) (54)
Используя точку a = (-L, 0) и c = (L, 0), можно измерить Отвечающую STA в положении b = (x4, y4)
cos_c4 = ( d2_2_c2 + 4L2 - d2_1_c2 ) / ( 2 * d2_2_c * 2L ) (55)
Затем мы проверяем, находятся ли все 4 из вычисленных косинусов в интервале [-1, 1]. Из представленного ниже раздела "Связь между проверкой по теореме косинусов и проверкой по неравенству треугольника" мы знаем, что до сих пор выполняли тот же тест, что и тесты на неравенство треугольника, поэтому с проверкой до сих пор применяются три вышеприведенные таблицы.
Если все четыре вычисленных косинуса находятся в интервале [-1, 1], вычисляем четыре точки b1, b2, b3 и b4 для положения отвечающей STA следующим образом.
x1 = cos_c1 * d1_c (56)
y1 = √( 1 - cos_c12 ) * d1_c (57)
x2 = -cos_c2 * d1_c (58)
y2 = √( 1 - cos_c22 ) * d1_c (59)
x3 = L - cos_c3 * d2_1_c (60)
y3 = √( 1 - cos_c32 ) * d2_1_c (61)
x4 = -L + cos_c4 * d2_2_c (62)
y4 = √( 1 - cos_c42 ) * d2_2_c (63)
Если Отвечающая STA достоверно сообщила о своих измерениях времени, эти 4 точки должны быть одинаковыми, за исключением влияния погрешностей измерения времени. Следует отметить, что, как также объясняется в другом месте, погрешности измерения можно уменьшить за счет выполнения измерений множество раз и усреднения результатов. Однако эти 4 точки отличаются друг от друга, когда Отвечающая STA фальсифицирует свои измерения, чтобы казаться ближе, чем она есть на самом деле, и когда Отвечающая STA не находится на линии, проходящей через Взаимодействующие STA 1 и 2.
Вычисляем максимальное значение emax всех расстояний между 4 точками b1, b2, b3 и b4
emax = MAX | bi - bj | для i ∈{1, 2, 3, 4} и j ∈{1, 2, 3, 4} (64)
Следует отметить, что вычислять b4 необязательно, поскольку b3 и b4 будут вычисляться как одна и та же точка, за исключением числовых погрешностей.
В следующем разделе использовано неравенство треугольника и две Взаимодействующие STA. Лучшие технические характеристики могут быть получены при размещении более двух Взаимодействующих STA вокруг Инициирующей STA. Для лучшего обнаружения мошеннических Отвечающих STA, находящихся в максимально возможном количестве положений вокруг Инициирующей STA, лучше всего разместить Инициирующую STA и Взаимодействующие STA в плоскости при использовании трех взаимодействующих STA. Это связано с тем, что если Инициирующая STA не находится в плоскости, проходящей через три Взаимодействующих STA, будет объем, в котором мошенническая Отвечающая STA всегда будет ближе к Инициирующей STA, чем любая из трех Взаимодействующих STA, и в котором, следовательно, предложенный способ не работает (см., например, Таблицу 2).
Также возможно использовать две Взаимодействующие STA и Инициирующую STA, которые не расположены на одной линии, но совокупность которых образует треугольник. Используя расстояния d1, d2_1, d2_2 и длины сторон треугольника, образованного двумя Взаимодействующими STA и Инициирующей STA, Инициирующая STA может выполнять проверки с использованием теоремы косинусов для треугольников, образованных вторым устройством и любой парой устройств из набора двух Взаимодействующих STA и Инициирующей STA.
При использовании четырех Взаимодействующих STA они в идеальном случае должны быть расположены в углах правильного тетраэдра, а Инициирующая STA должна быть расположена в центре тяжести правильного тетраэдра. Эта совокупность является наиболее симметричной из возможных и поэтому обеспечивает наилучшую защиту.
Вершины правильного тетраэдра с четырьмя точками на единичной сфере, центром тяжести в начале координат и нижним уровнем грани на горизонтали имеют следующие координаты
A = ( √(8/9), 0, -1/3 )
B = ( -√(2/9), √(2/3), -1/3 )
C = ( -√(2/9), -√(2/3), -1/3 )
D = ( 0, 0, 1 )
Следовательно, в этом случае Взаимодействующие STA расположены в положении вершин, а Инициирующая STA расположена в начале координат, и расстояние L равно 1. Наибольшее расстояние между любыми двумя STA представляет собой расстояние между любыми двумя Взаимодействующими STA, что является длиной каждого из ребер правильного тетраэдра, которая равна
|| A - D|| = || ( √(8/9), 0, -1/3 ) - ( 0, 0, 1 ) ||
= || ( √(8/9), 0, - 4/3 ) ||
= √(8/3) ≈ 1,63 (65)
Наибольший угол между любой Взаимодействующей STA, точкой начала координат и Отвечающей STA имеет место, когда Отвечающая STA находится на линии, проходящей через начало координат и центр тяжести любой из четырех граней правильного тетраэдра. Центр тяжести грани ABD равен
F = { ( √(8/9), 0, -1/3 ) + ( -√(2/9), √(2/3), -1/3 ) + ( 0, 0, 1 ) } / 3
= ( √(8/9) - √(2/9) , √(2/3), 1/3 ) / 3 (66)
Углы ∠AOF, ∠BOF и ∠DOF одинаковы. Этот угол можно вычислить с помощью теоремы косинусов
cos( ∠DOF ) = (||D||2 + ||F||2 - ||D - F||2 ) / ( 2 * ||D|| * ||F|| ) (67)
||D||2 = 1 (68)
||F||2 = { ( √(8/9) - √(2/9) )2 + 2/3 + 1/9 } / 9
= { 8/9 + 2/9 - 2 * √(16/81) + 7/9 } / 9
= 1/9 (69)
||D - F||2 = { ( √(8/9) - √(2/9) )2 + 2/3 } / 9 + ( 8/9 )2
= { 8/9 + 2/9 - 2 * √(16/81) + 2/3 } / 9 + 64/81
= { 2/9 + 6/9 } / 9 + 64/81
= 72/81 = 8/9 (70)
Таким образом
cos( ∠DOF ) = (1 + 1/9 - 8/9 ) / ( 2 * 1 * 1/3 )
= 3 * (2/9) / 2
= 1/3 (71)
∠DOF ) = arccos(1/3) = 70,53 градусов (72)
Следовательно, в случае совокупности из одной Инициирующей STA, расположенной в центре тяжести правильного тетраэдра, и четырех Взаимодействующих STA, расположенных в вершинах этого тетраэдра на расстоянии L от Инициирующей STA, все Отвечающие STA, которые хотят сымитировать, что они находятся ближе, чем 0,5 L от Инициирующей STA, могут быть обнаружены, если они находятся дальше, чем 1,5L от Инициирующей STA, см. Таблицу 1. Многие такие STA, расположенные в области от 0,5 L до 1,5 L, могут быть обнаружены.
При необходимости защита может быть улучшена путем добавления проверок несогласованности в вычисленных положениях с использованием Инициирующей STA и Взаимодействующих STA аналогично защите, описанной в предыдущем разделе.
В варианте осуществления протокол измерения дальности может включать первое устройство, действующее как инициирующее устройство, отправляющее инициирующее сообщение на второе устройство, в то время как второе устройство после приема инициирующего сообщения должно отправить сообщение об измерении. Первый процессор сообщений выполнен с возможностью обмена данными о смене ролей с третьим устройством для обеспечения третьему устройству возможности действия в качестве инициирующего устройства для измерения расстояния. Кроме того, третье устройство выполнено с возможностью определения третьего расстояния между третьим устройством и вторым устройством в соответствии с протоколом измерения дальности на основании второго сообщения об измерении и возможностью определения третьего направления при приеме второго сообщения об измерении на третьем устройстве. Кроме того, третье устройство передает третьи данные поддержки на первое устройство, причем третьи данные поддержки указывают на третье расстояние и третье направление. Например, третьи данные поддержки могут содержать третье направление или третий угол. Кроме того, данные поддержки могут содержать значения t2 и t3 протокола FTM, измеренные третьим устройством. Значения t1 и t4 также могут быть их частью, но это не обязательно, поскольку первое устройство может принимать и использовать исходное сообщение от второго устройства, содержащее t1 и t4.
Кроме того, первый процессор сообщений выполнен с возможностью определения второго направления при приеме второго сообщения об измерении на первом устройстве, возможностью приема от третьего устройства третьих данных поддержки и возможностью выполнения проверочного теста также с использованием второго направления и третьих данных поддержки. В варианте осуществления Инициирующая STA и Взаимодействующая STA меняются ролями или, иначе говоря, вычисляют положение дважды с использованием двух Инициирующих STA.
В совокупности по Фиг. 4 теперь есть два устройства 410, 430, действующих как первая STA 1 и вторая STA 2, которые работают вместе для определения расстояния до Отвечающей STA. В серии измерений STA 1 действует в качестве Инициирующей STA, а STA 2 - в качестве Взаимодействующей STA, а во второй серии измерений они меняют свои роли на противоположные. Отдельные измерения времени в каждой серии усредняют перед вычислением расстояния для улучшения результата измерения расстояния. Все отдельные измерения первой серии могут быть выполнены до смены ролей и выполнения отдельных измерений второй серии. Но смена ролей также может быть произведена после любого количества отдельных измерений.
Используя измерения времени из первой серии измерений, когда STA 1 является Инициирующей STA, можем использовать уравнения (56) и (57) для вычисления положения r1 = (x1, y1) Отвечающей STA. Используя измерения времени из второй серии измерений, когда STA 2 является Инициирующей STA, можем использовать аналогичные уравнения для вычисления положения r2 = (x2, y2) Отвечающей STA. Следует отметить, что в этой конкретной совокупности второе устройство 420 может находиться в любом месте в 3d на окружности, центр которой расположен на линии, проходящей через первое и третье устройства. Вследствие этого мы вычисляем местоположение второго устройства здесь только как 2d координату в плоскости, проходящей через первое, второе и третье устройства.
Вычисленные точки r1 и r2 должны быть равны, за исключением погрешностей измерения, если Отвечающая STA достоверно сообщает о своих измерениях времени. Но это может быть иначе, если Отвечающая STA хочет казаться находящейся ближе, чем она есть на самом деле.
В предыдущих разделах мошенническая Отвечающая STA пыталась казаться находящейся на расстоянии f от Инициирующей STA. Предположим, Отвечающая STA не знает, что две STA время от времени меняются ролями, и пытается казаться находящейся на сфальсифицированном расстоянии f от каждой из них. В этом случае, r1 и r2 будут явно разными, особенно если f < 0,5 L.
Следовательно, использование двух или более STA, каждая из которых служит в качестве Инициирующей STA, и вычисление местоположения Отвечающей STA с использованием расстояний, измеренных каждой из Инициирующих STA, и оценка разницы в вычисленных местоположениях является хорошей идеей для обнаружения Отвечающих STA, которые фальсифицируют свои измерения времени.
Однако описанная выше атака является не самой лучшей возможной атакой в данной ситуации. Лучшая атака представляет собой атаку, когда Отвечающая STA знает, при помощи какой Инициирующей STA она выполняет протокол FTM, и когда ей известны параметры совокупности (т.е. L и ϕ или d1 и d2). Это может быть трудно узнать на практике, но это не является невозможным. Хорошей практикой безопасности является предположение, что злоумышленник знает всё, кроме секретных криптографических ключей. Поэтому предпочтительно используют защиту, описанную в предыдущих разделах.
В следующем разделе описана связь между проверкой по теореме косинусов и проверкой по неравенству треугольника. Проверка выполнения неравенств треугольника для трех длин |A|, |B| и |C|
|C| ≤ |A| + |B| (73)
|A| ≤ |B| + |C| (74)
|B| ≤ |A| + |C| (75)
является такой же, как проверка
-1 ≤ cos (∠ACB ) ≤ 1 (76)
Теорема косинусов для угла ∠ACB представлена как
cos (∠ACB ) = ( |A|2 + |B|2 - |C|2 ) / ( 2 * |A| * |B| ) (77)
Проверка того, не составляет ли косинус менее -1 дает
cos (∠ACB ) ≥ -1 ⇔
( |A|2 + |B|2 - |C|2 ) / ( 2 * |A| * |B| ) ≥ -1 (78)
Мы можем получить следующее неравенство из неравенства (78), только если |A| * |B| ) > 0
( |A|2 + |B|2 - |C|2 ) ≥ -2 * |A| * |B| ⇔
( |A|2 + |B|2 + 2 * |A| * |B| - |C|2 ) ≥ 0 ⇔
( |A| + |B| )2 - |C|2 ≥ 0 ⇔
( |A| + |B| )2 ≥ |C|2 ⇒
|C| ≤ ( |A| + |B| ) (79)
что является тем же самым, что и неравенство (73).
Аналогичным образом, проверка того, не составляет ли косинус более 1 дает
cos (∠ACB ) ≤ 1 ⇔
( |A| - |B| )2 - |C|2 ≤ 0 ⇔
( |A| - |B| )2 ≤ |C|2 ⇔
abs( |A| - |B| ) ≤ |C| ⇔
|A| ≤ ( |B| + |C| ) & |B| ≤ ( |A| + |C| ) (80)
причем два неравенства также должны выполняться для треугольника.
Следует отметить, что реальные расстояния всегда больше или равны 0. Приведенное выше рассуждение справедливо для положительных расстояний, но не для отрицательных расстояний. Расстояния, полученные Инициирующей STA, могут быть отрицательными, когда Отвечающая STA фальсифицирует свои измерения, чтобы казаться расположенной ближе. Следовательно, проверка трех неравенств треугольника эквивалентна проверке того, являются ли три измеренных расстояния больше или равными 0, и проверке того, выполняется ли неравенство косинусов (76).
В варианте осуществления третий процессор сообщений выполнен с возможностью определения мощности третьего сигнала по меньшей мере одного сообщения, принятого от второго устройства, и включения данных о мощности третьего сигнала в данные поддержки для первого устройства. Первый процессор сообщений выполнен с возможностью определения мощности первого сигнала по меньшей мере одного сообщения, принятого от второго устройства, и проверки надежности определенных расстояний посредством сравнения мощности первого сигнала и мощности третьего сигнала с соответствующими расчетными значениями мощности сигнала на определенных расстояниях. В варианте осуществления дополнительно выполняют измерение расстояния на основании мощностей сигнала для повышения достоверности. Помимо времени прихода и передачи для измерения расстояния также может быть использована мощность принятого сигнала. Устройство включает мощность передачи, с которой сообщение отправляется другому устройству, в этом сообщении, другое устройство измеряет мощность принятого сигнала, и другое устройство может определять расстояние на основании предполагаемых характеристик антенны передатчика (например, что она всенаправленная) и того, что мощность сигнала обратно пропорциональна квадрату расстояния. Когда по меньшей мере одно взаимодействующее устройство измеряет мощность сигнала того же сообщения и включает такие данные в данные поддержки, которые передают на первое устройство, первое устройство может определять соотношение расстояний от второго устройства на основании значений мощности принятых сигналов.
В варианте осуществления первое устройство и третье устройство могут быть реализованы базовыми станциями в сети 3GPP, а второе устройство реализовано посредством UE. Базовые станции в 3GPP осуществляют прием и передачу в частотно-временной сетке так называемых ресурсных элементов. Некоторые положения в частотно-временной сетке зафиксированы стандартом 3GPP и используются для широковещательной передачи системной информации на все UE в зоне действия базовой станции, например информации о том, когда и на каких частотах базовая станция будет отправлять что-то на конкретное UE (нисходящая линия связи), и когда и на каких частотах конкретное UE может отправлять что-то на базовую станцию (восходящая линия связи) или на конкретное другое UE (боковая линия связи). Когда базовые станции взаимодействуют в соответствии с настоящим изобретением, их частотно-временные сетки должны быть выровнены и синхронизированы, и каждая из них должна обеспечить доступность одних и тех же частотно-временных положений (ресурсных элементов) в сетке, так чтобы все они могли измерять время прихода или мощность принятого сигнала одного и того же сообщения от одного и того же UE.
В дополнительном варианте осуществления протокол измерения дальности содержит дополнительный атрибут или дополнительное сообщение, которое, например, может быть добавлено к протоколу измерения дальности, как определено в [802.11], содержащему учетные данные (например, открытый ключ) или хэш учетных данных или зашифрованных учетных данных. Такое сообщение является примером сообщения, которое криптографически защищено на основе данных ключа. Второе устройство может включать в себя такие учетные данные или хэш учетных данных или зашифрованных учетных данных, как часть обмена сообщениями для протокола измерения дальности. Чтобы быть симметричным, первое устройство также может включать такие учетные данные, хэш учетных данных или зашифрованных учетных данных в дополнительном сообщении. Предпочтительное поле, содержащее учетные данные или хэш учетных данных или зашифрованных учетных данных в сообщении протокола измерения дальности, является полем, в котором сигнал или по меньшей мере часть сигнала, передающего это поле, используют для измерения времени передачи или прихода сообщения, так что для другого устройства очень сложно, если не невозможно, вставить свои учетные данные или хэш своих учетных данных или зашифрованных учетных данных в сообщение, которое используют для измерения расстояния между первым и вторым устройствами. Чем ближе (по времени) сигнал, несущий учетные данные или хэш учетных данных или зашифрованных учетных данных, к сигналу, который используют для измерения диапазона, или чем больше перекрытие между этими сигналами, тем лучше. Таким образом, первое устройство может быть уверено, что учетные данные или хэш учетных данных или зашифрованных учетных данных в сообщении протокола измерения дальности действительно относятся ко второму устройству, с которым оно исполняет протокол измерения дальности. В одном варианте осуществления первый процессор сообщений выполнен с возможностью обработки этих учетных данных или хэша учетных данных или зашифрованных учетных данных и проверяет, соответствуют ли они учетным данным, которые ранее были использованы устройством, с которым он успешно выполнил аутентификацию устройства и установил взаимное доверие, например, с использованием протокола защищенной настройки Wi-Fi, протокола инициализации устройств, обмена ключами по методу Диффи-Хеллмана и/или 4-стороннего квитирования WPA2. Если совпадение найдено, первое устройство может предположить, что измерения расстояния между первым и вторым устройством можно считать достоверными и надежными. Если совпадение не найдено, первое устройство не будет доверять измерениям расстояния между первым и вторым устройством и выполнит дополнительные шаги для проверки достоверности измерений расстояния, например, с использованием механизмов, описанных в других вариантах осуществления. В другом варианте осуществления измеренные значения (например, первые данные о времени и/или вторые данные о времени) зашифрованы с использованием ключа, который был согласован или получен из согласованных учетных данных между первым и вторым устройствами, как было установлено во время более ранней процедуры аутентификации устройства, выполняемой между первым и вторым устройствами.
В альтернативном варианте осуществления второе устройство может включать в себя учетные данные или хэш учетных данных или зашифрованных учетных данных, которые будут использованы во время более поздней установки соединения. Первый процессор сообщений выполнен с возможностью обработки и хранения полученных учетных данных или хэша учетных данных или зашифрованных учетных данных вместе с измеренным расстоянием между первым устройством и вторым устройством для надежного сопоставления измеренных расстояний с конкретным устройством, которое соединяется с этими учетными данными. После установки соединения между первым и вторым устройствами первое устройство проверяет, используются ли те же самые учетные данные или их производные при выполнении аутентификации устройства, например, во время выполнения Протокола защищенной настройки Wi-Fi, Протокола инициализации устройства, обмена ключами по методу Диффи-Хеллмана и/или 4-стороннего квитирования WPA2. Таким образом, первое устройство может определить, что устройство, с которым оно соединяется, является тем же устройством, для которого было выполнено конкретное измерение расстояния. В частности, если учетные данные были открытым ключом, и если установка соединения между первым и вторым устройствами включала в себя то, что второе устройство успешно доказало устройству 1, что оно владеет закрытым ключом, принадлежащим открытому ключу, в качестве учетных данных при измерении дальности, первое устройство может быть уверено, что дальность была измерена именно вторым устройством, а не мошенническим устройством.
В варианте осуществления первый процессор сообщений выполнен, после оценки того, что определенное расстояние не является надежным, с возможностью перехода к другому процессу или функции, запрету доступа к данным или функции вместо намеченного процесса. Например, обычный процесс, основанный на определении расстоянии, может заключаться в предоставлении доступа к услуге, основанной на определении местоположения, или локальному периферийному устройству. Кроме того, маршрутизация к первому устройству или от него через другую сеть, например локальную сеть Ethernet, Интернет, базовую сеть 3GPP, могут контролироваться или запрещаться на основании измерения расстояния. Если определенное расстояние признано ненадежным, во всех обменах данными и/или доступе может быть отказано, и/или может быть отправлено предупреждающее сообщение в систему управления или охраны. Кроме того, первый процессор сообщений может быть выполнен, перед переходом к любому обычному процессу, основанному на определении расстояния, с возможностью задействования другого протокола безопасности со вторым устройством, такого как запрос дополнительных учетных данных и/или личной идентификации пользователя. Другой протокол безопасности может быть дополнительным процессом или дополнительным улучшенным исполнением основного протокола и может, например, привести к более строгим или серьезным мерам в обычном процессе обеспечения безопасности. При необходимости первый процессор сообщений выполнен с возможностью запроса дополнительного измерения расстояния с использованием другого протокола измерения дальности и/или другого типа беспроводной связи, например NFC на очень близком расстоянии, или человеком-оператором второго устройства для обеспечения некоторой идентификации и/или биометрических данных, таких как отпечатки пальцев. Кроме того, первый процессор сообщений может быть выполнен, перед переходом к любому обычному процессу, основанному на определении расстояния, с возможностью запрета или ограничения доступа по меньшей мере к некоторым данным и/или по меньшей мере к одному приложению в первом устройстве. Например, базовая услуга может быть предоставлена, даже если расстояние признано ненадежным, а расширенную услугу предоставляют, если расстояние признано надежным.
На Фиг. 8 изображен способ измерения расстояния посредством беспроводной связи между первым устройством и вторым устройством. Беспроводная связь включает в себя протокол измерения дальности, как описано выше. Первое устройство и второе устройство аналогичны первому и второму устройствам, показанным и дополнительно описанным со ссылкой на Фиг. 1. Третье устройство действует как взаимодействующее устройство, расположенное на достоверном расстоянии от первого устройства, и при этом совместно использует направление соединения. Способ может быть выполнен процессором в первом устройстве, но также может быть обработан процессором в другом устройстве и/или в другое время на основе принятого времени прихода и данных поддержки. Например, способ может быть выполнен на другом устройстве, которое не участвует активно в протоколе измерения дальности, но принимает все сообщения и знает о достоверном расстоянии.
Способ начинается с узла START 801. На первом этапе RNGP 802 способ может выполнять протокол измерения дальности и выполнять измерения времени прихода, как описано со ссылкой на Фиг. 1. Способ продолжается на этапе ODA1 803 для получения данных о расстоянии и угле на первом устройстве. Определяют первое расстояние между первым устройством и вторым устройством на основании первого времени прихода сообщения об измерении на первом устройстве. Кроме того, определяют первое направление при приеме сообщения об измерении на первом устройстве и первый угол между первым направлением и направлением соединения. Далее способ продолжается посредством обмена данными с взаимодействующим устройством на этапе CO_COP 804. Взаимодействующее устройство содержит третью направленную антенну для обнаружения направления принятого сигнала, несущего сообщение, и выполнено с возможностью определения третьего направления при приеме сообщения об измерении на взаимодействующем устройстве и возможностью обеспечения данных поддержки, причем данные поддержки указывают на третье направление и при необходимости указывают на третье время прихода сообщения об измерении на взаимодействующем устройстве. Затем при приеме данных поддержки способ продолжается посредством оценки определенного расстояния. На следующем этапе OA3 805 определяют третий угол между третьим направлением и направлением соединения на основании данных поддержки. Кроме того, может быть определено третье расстояние между третьим устройством и вторым устройством с использованием данных поддержки, например рассчитывают его на основании третьего времени прихода и времени передачи сообщения об измерении. Наконец, на этапе VERT 806 выполняют проверочный тест на первом расстоянии, достоверном расстоянии, первом угле и третьем угле и при необходимости на третьем расстоянии. Проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства. Тест может быть основан на неравенствах треугольника и проверках несогласованности, как объяснено выше.
В варианте осуществления способ может включать подготовительный этап, на котором первому устройству выдают инструкцию действовать в качестве инициирующего устройства для обеспечения первого времени прихода или первого расстояния. Аналогичным образом, третьему устройству может быть дана инструкция действовать в качестве взаимодействующего устройства для обеспечения данных поддержки, основывающихся на третьем времени прихода. Подготовительный этап может выполняться отдельным устройством управления, компьютером или сервером. В альтернативном варианте первое устройство или третье устройство может выполнять указанную выдачу инструкции.
На Фиг. 9 показан способ действия в качестве взаимодействующего устройства при измерении расстояния посредством беспроводной связи между первым устройством и вторым устройством, как описано выше со ссылкой на Фиг. 8. Взаимодействующее устройство может быть расположено на достоверном расстоянии от первого устройства, Взаимодействующее устройство использует направление соединения совместно с первым устройством, причем направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство. Взаимодействующее устройство содержит третью направленную антенну для обнаружения направления принятого сигнала, несущего сообщение.
Способ начинается с узла START 901. На первом этапе RNGP 902 способ может контролировать протокол измерения дальности, выполняемый первым и вторым устройствами. Способ продолжается на этапе DIR3 903 посредством определения третьего направления при приеме сообщения об измерении на третьем устройстве. Далее, на этапе CO_IN 904, взаимодействующее устройство осуществляет обмен данными с первым устройством, например, с использованием беспроводного протокола или проводного соединения. Затем, на этапе SUP 905, способ предоставляет данные поддержки первому устройству. Данные поддержки указывают на третье направление и при необходимости указывают на третье время прихода сообщения об измерении на взаимодействующем устройстве. Затем способ на взаимодействующем устройстве заканчивается на узле END 906. Как описано выше, первое устройство выполнено с возможностью определения указанного третьего угла с использованием данных поддержки и возможностью проведения проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле и при необходимости третьем расстоянии.
На Фиг. 10а показан компьютерочитаемый носитель 1000, имеющий записываемую часть 1010, содержащую компьютерную программу 1020, причем компьютерная программа 1020 содержит инструкции для побуждения процессорной системы к выполнению в системе одного или более из вышеупомянутых способов, как описано со ссылкой на Фиг. 9-10. Компьютерная программа 1020 может быть реализована на компьютерочитаемом носителе 1000 в виде физических меток или посредством намагничивания компьютерочитаемого носителя 1000. Однако возможен также любой другой подходящий вариант осуществления. Кроме того, следует понимать, что, хотя компьютерочитаемый носитель 1000 показан здесь как оптический диск, компьютерочитаемый носитель 1000 может быть любым подходящим компьютерочитаемым носителем, таким как жесткий диск, твердотельная память, флэш-память и т.п., и может быть незаписываемым или записываемым. Компьютерная программа 1020 содержит инструкции для побуждения процессорной системы к выполнению указанных способов.
На Фиг. 10b схематично представлена процессорная система 1100 согласно варианту осуществления устройства или сервера, как описано со ссылкой на Фиг. 9-10. Процессорная система содержит одну или более интегральных схем 1110. Архитектура одной или более интегральных схем 1110 схематично показана на Фигуре. Схема 1110 содержит блок 1120 обработки данных, например ЦПУ, для выполнения элементов компьютерной программы, чтобы выполнить способ согласно варианту осуществления и/или реализовать его модули или блоки. Схема 1110 содержит память 1122 для хранения программного кода, данных и т.д. Часть памяти 1122 может быть доступна только для чтения. Схема 1110 может содержать элемент 1126 связи, например антенну, соединители или и то, и другое и т.п. Схема 1110 может содержать специализированную интегральную схему 1124 для выполнения части или всей обработки, определенной в способе. Процессор 1120, память 1122, специализированная ИС 1124 и элемент связи 1126 могут быть соединены друг с другом через межкомпонентное соединение 1130, например, шину. Процессорная система 1110 может быть выполнена с возможностью контактной и/или бесконтактной связи с использованием антенны и/или разъемов соответственно.
Обеспечены компьютерные программные продукты, загружаемые из сети и/или хранящиеся на компьютерочитаемом носителе и/или исполняемом микропроцессором носителе, которые содержат инструкции программного кода для реализации вышеупомянутых способов при исполнении на компьютере для защиты информации о местоположении, как объяснено дополнительно ниже.
Любой способ согласно изобретению может быть выполнен с использованием программного обеспечения, которое содержит инструкции для побуждения процессорной системы к выполнению соответствующего способа. Программное обеспечение может включать только те шаги, которые предпринимаются конкретным субъектом системы. Программное обеспечение может храниться на подходящем носителе информации, таком как жесткий диск, дискета, память и т.п. Программное обеспечение может быть отправлено в виде сигнала по проводному или беспроводному каналу либо с использованием сети передачи данных, например, Интернета. Программное обеспечение может быть доступно для скачивания и/или для удаленного использования на сервере. Способ в соответствии с изобретением может быть осуществлен с использованием битового потока, выполненного с возможностью конфигурирования программируемых логических схем, например программируемой пользователем матрицы логических элементов (field-programmable gate array, FPGA), для выполнения способа. Следует понимать, что программное обеспечение может быть представлено в виде исходного кода, объектного кода, промежуточного исходного кода, такого как частично скомпилированная форма, или в любом другом виде, подходящем для использования при реализации способа в соответствии с изобретением. Вариант осуществления, относящийся к компьютерному программному продукту, содержит исполняемые компьютером инструкции, соответствующие каждому из этапов обработки по меньшей мере одного из изложенных способов. Эти инструкции могут быть разделены на подпрограммы и/или храниться в одном или более файлах, которые могут быть связаны статически или динамически. Другой вариант осуществления, относящийся к компьютерному программному продукту, содержит исполняемые компьютером инструкции, соответствующие каждому из средств по меньшей мере одной из систем и/или продуктов, описанных в настоящем документе.
Следует отметить, что для ясности в вышеприведенном описании представлены варианты осуществления изобретения со ссылкой на различные функциональные блоки и процессоры. Однако очевидно, что любое подходящее распределение функциональных возможностей между различными функциональными блоками или процессорами может быть использовано в пределах изобретения. Например, функциональные возможности, изображенные как выполняемые отдельными блоками, процессорами или контроллерами, могут быть выполнены одним и тем же процессором или контроллерами. Следовательно, ссылки на конкретные функциональные блоки следует рассматривать только как ссылки на подходящие средства для обеспечения описанных функциональных возможностей, а не как указание на строгую логическую или физическую структуру или организацию. Изобретение может быть реализовано в любой подходящей форме, включая аппаратные средства, программное обеспечение, программно-аппаратные средства или любую их комбинацию.
Следует отметить, что в настоящем документе слово "содержащий" не исключает наличия элементов или этапов, отличных от перечисленных, а грамматические средства выражения формы единственного числа, предшествующие элементу, не исключают наличия множества таких элементов, что никакие ссылочные позиции не ограничивают объем формулы изобретения, что изобретение может быть реализовано посредством как аппаратных средств, так и программного обеспечения, и что несколько "средств" или "блоков" могут быть представлены одним и тем же элементом аппаратных средств или программного обеспечения, и процессор может выполнять функцию одного или более блоков, возможно, во взаимодействии с аппаратными элементами. Кроме того, изобретение не ограничено вариантами осуществления, и изобретение заключается в каждом новом признаке или комбинации признаков, описанных выше или изложенных в отличающихся друг от друга зависимых пунктах формулы изобретения.
Справочные документы
[36.133] Технические условия 3GPP TS 36.133: "Перспективный универсальный наземный радиодоступ (E-UTRA); Требования к поддержке управления радиоресурсами".
[36.211] Технические условия 3GPP TS 36.211: "Перспективный универсальный наземный радиодоступ (E-UTRA); Физические каналы и модуляция".
[36.214] Технические условия 3GPP TS 36.214: "Перспективный универсальный наземный радиодоступ (E-UTRA); Физический уровень - измерения".
[36.321] Технические условия 3GPP TS 36.321: "Проект партнерства третьего поколения; Сеть радиодоступа группы технических условий; Перспективный универсальный наземный радиодоступ (E-UTRA); Спецификация протокола управления доступом к среде передачи (MAC)".
[36.355] Технические условия 3GPP TS 36.355: "Перспективный универсальный наземный радиодоступ (E-UTRA); Протокол позиционирования LTE (LPP)".
[37.571-1] Технические условия 3GPP TS 37.571-1: "Универсальный наземный радиодоступ (UTRA), перспективный UTRA (E-UTRA) и перспективное пакетное ядро (EPC); Спецификация соответствия оборудования (UE) пользователя для позиционирования UE; Часть 1: Спецификация теста на соответствие".
[802.11] Компьютерное общество IEEE, "Стандарт IEEE для информационных технологий - Телекоммуникации и обмен информацией между системами - Локальные и городские сети - Особые требования, Часть 11: Технические характеристики управления доступом к среде (MAC) беспроводной локальной сети LAN и физического уровня (PHY)", (Стандарт IEEE 802.11-2016), декабрь 2016 г.
[802.1AS] Информационные технологии - Телекоммуникации и обмен информацией между системами - Локальные и городские сети - Часть 1AS: Время и синхронизация для чувствительных ко времени приложений в мостовых локальных сетях, Ссылочный номер ISO/IEC/IEEE 8802-1AS: 2014(E)
[AAE]Martin Schüssel, "Оценка угла прихода с использованием WiFi и смартфонов", 2016 г., Международная конференция по внутреннему позиционированию и внутренней навигации (IPIN), 4-7 октября 2016 г., Alcalá de Henares, Испания; http://www3.uah.es/ipin2016/usb/app/descargas/223_WIP.pdf
[DH] Diffie, W.; Hellman, М. (1976), "Новые направления в криптографии", Труды по информационной теории IEEE, 22 (6): 644-654
[DPP] Протокол инициализации устройств - Технические характеристики - Версия 1.0, Wi-Fi Alliance, 2018 г., https://www.wi-fi.org/file-member/device-provisioning-protocol-specification.
[NAN] Neighbor Awareness Networking - Техническая спецификация - Версия 2.0, Wi-Fi Alliance, 2017г., https://www.wi-fi.org/file-member/device-provisioning-protocol-specification.
[OTDOA] Sven Fischer, "Позиционирование по наблюдаемой разнице во времени прихода (OTDOA) в 3GPP LTE", Qualcomm Technologies, Inc., 6 июня 2014 г.
[OWE] Оппортунистическое беспроводное шифрование - Технические характеристики - Версия 1.0, Wi-Fi Alliance, 2018 г., https://www.wi-fi.org/file-member/opportunistic-wireless-encryption-specification.
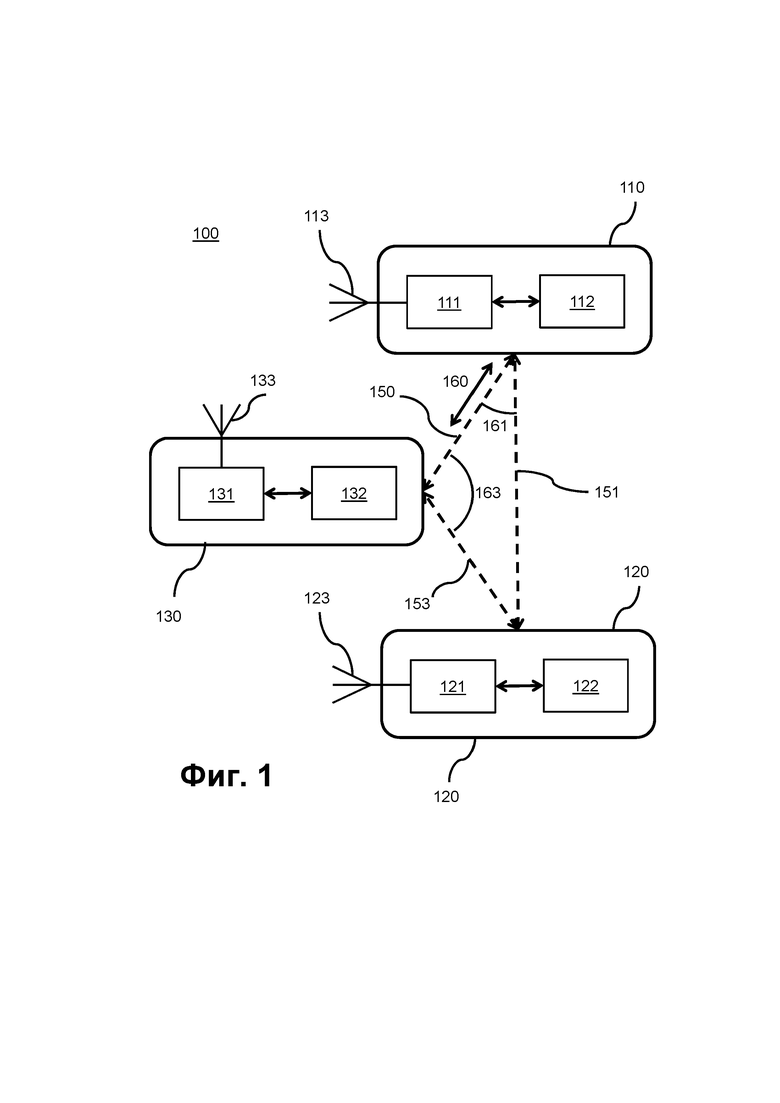
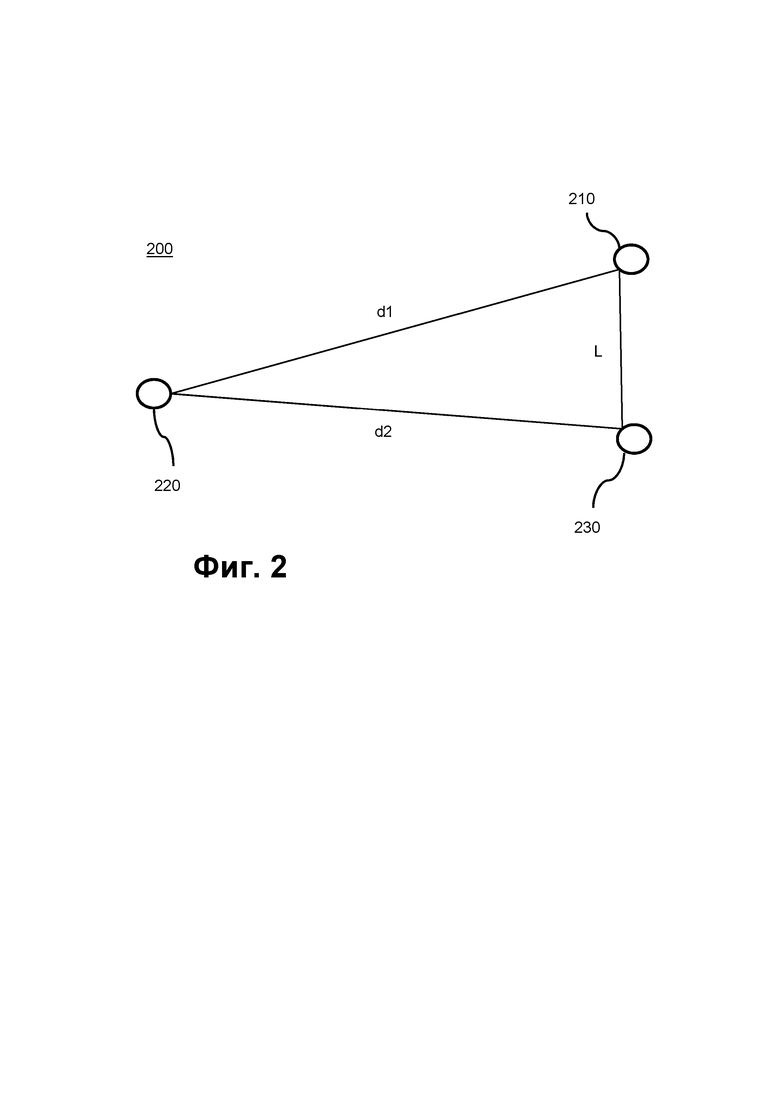
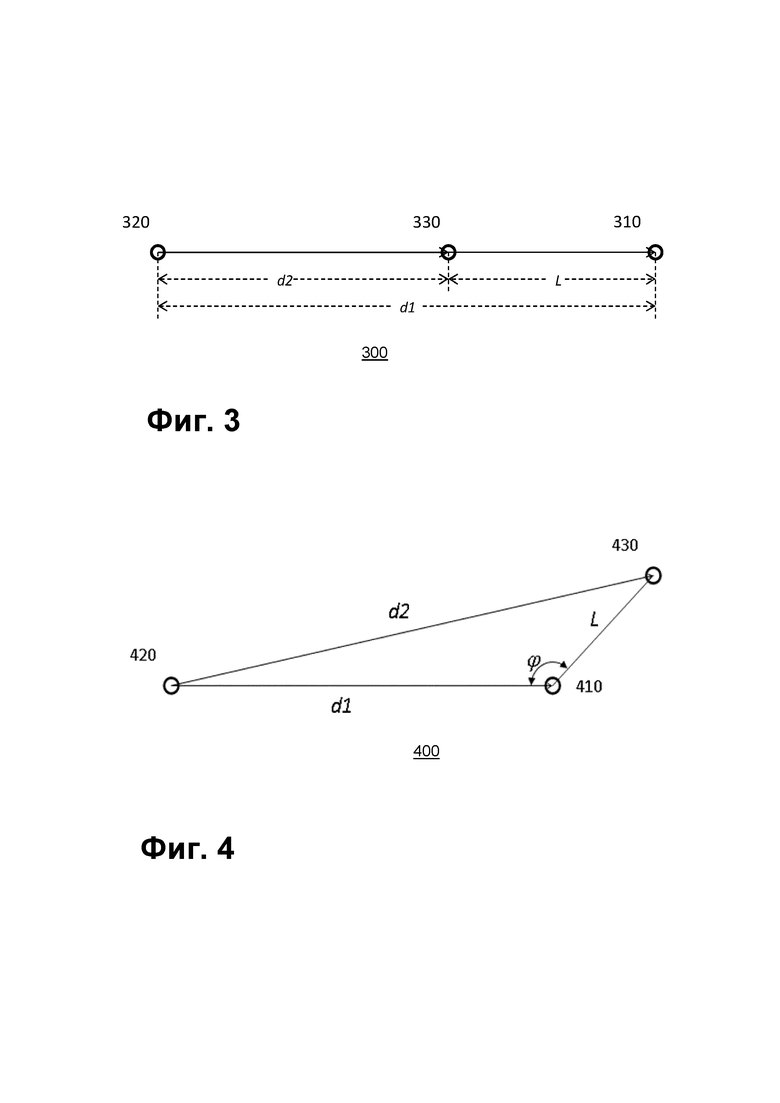
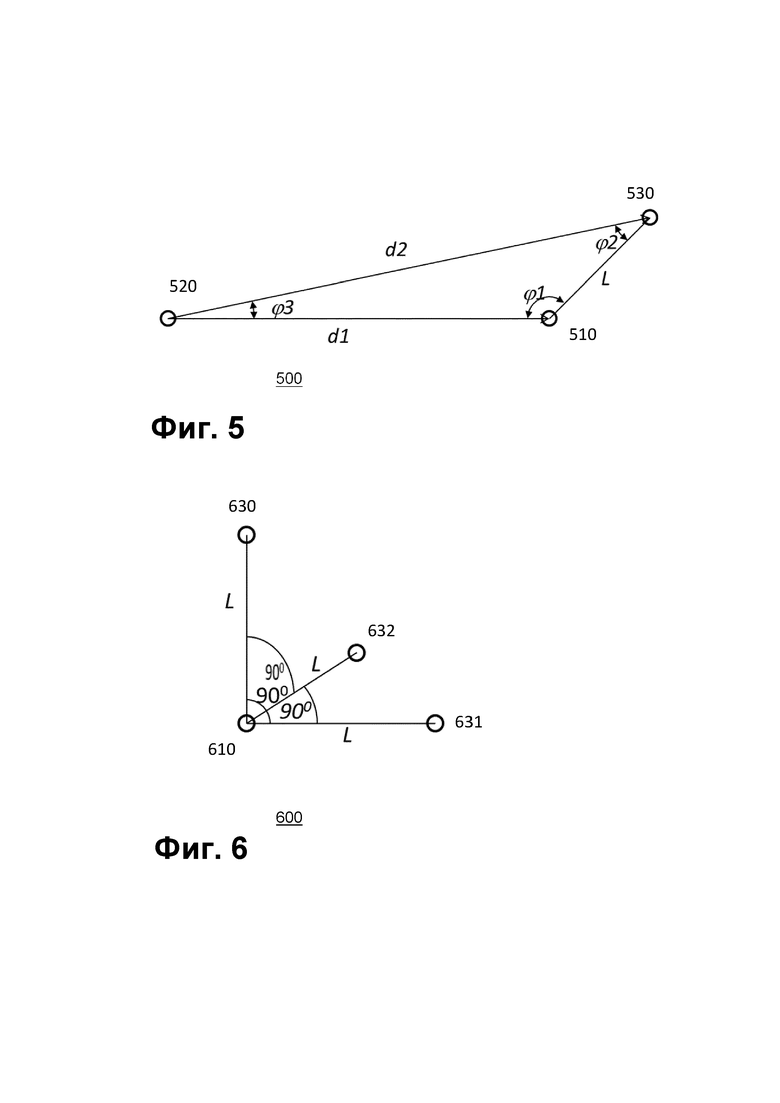
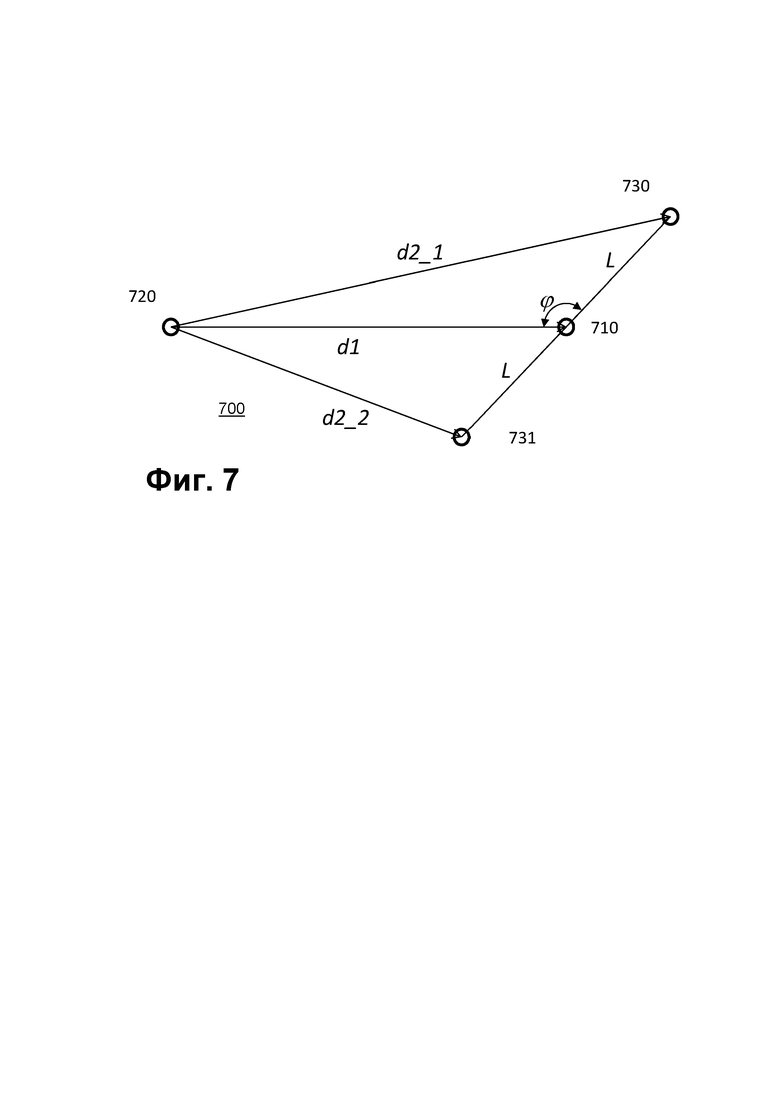
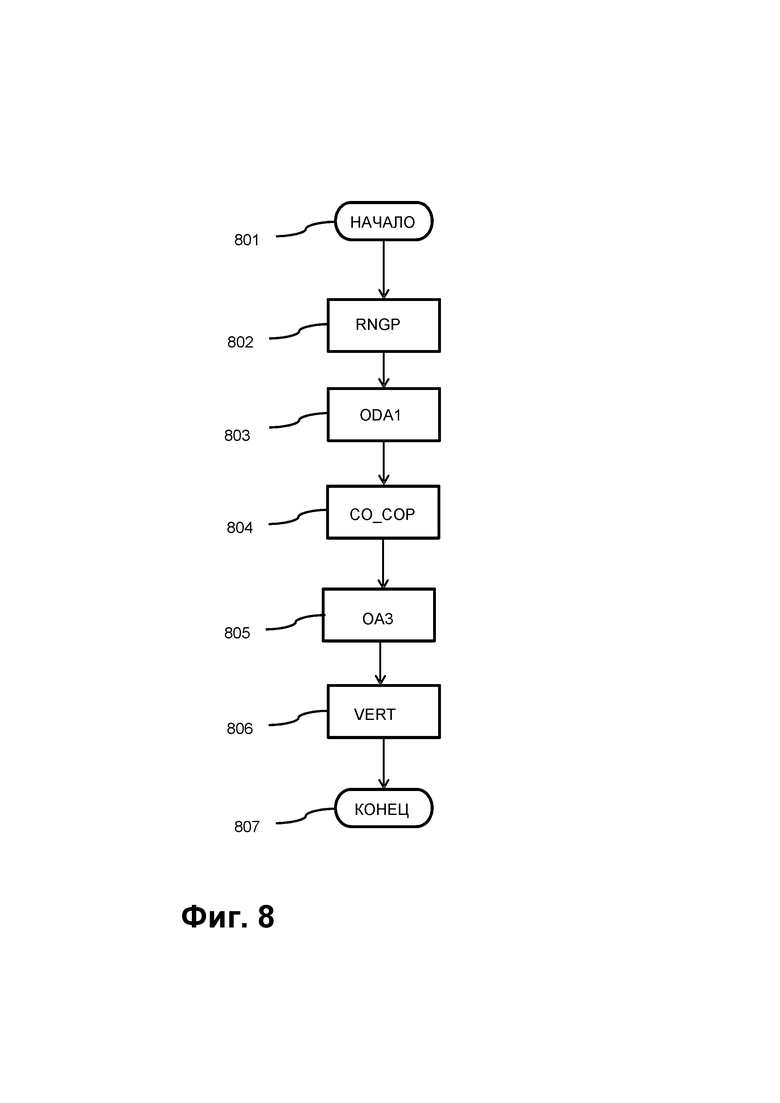

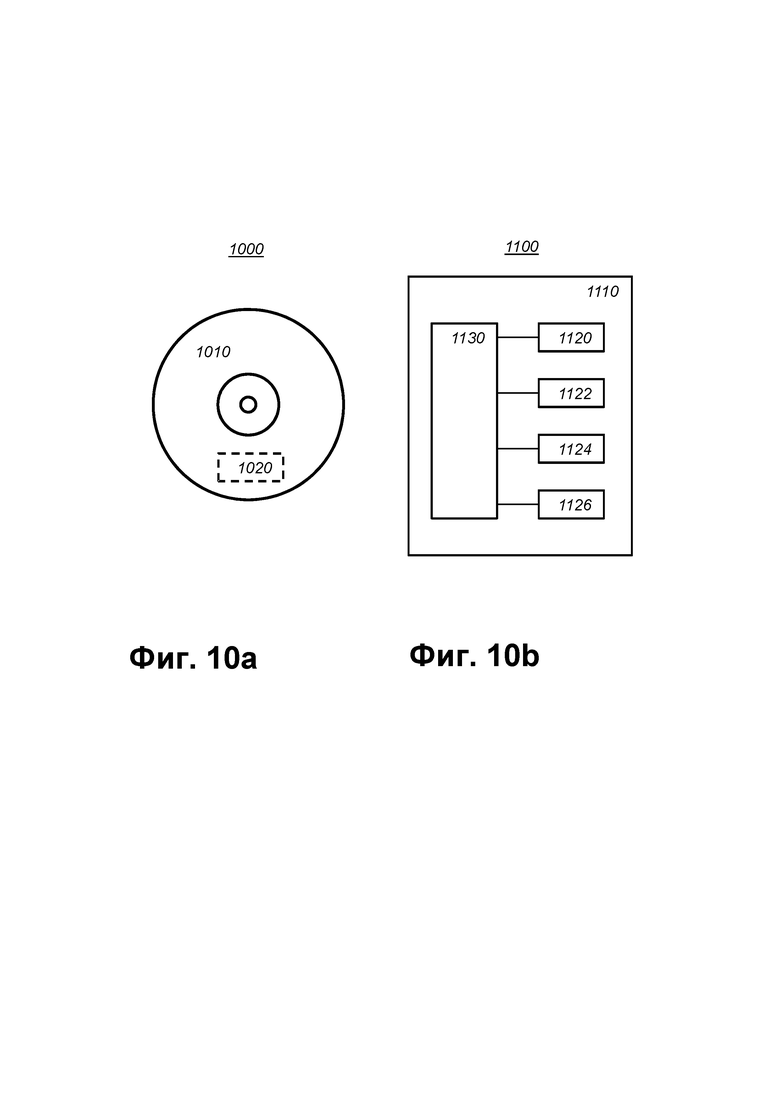
Изобретение относится к области систем определения местоположения, а именно к измерению расстояния посредством беспроводной связи между устройствами на основании времени прихода сообщения об измерении. Техническим результатом является повышение надежности измерения расстояния на основании времени прихода. Для этого устройство выполнено с возможностью определения первого расстояния в соответствии с протоколом измерения дальности с использованием сообщения об измерении от второго устройства. Взаимодействующее устройство (130) имеет направленную антенну (133) и расположено на достоверном расстоянии (150) и при этом использует направление (160) соединения совместно с первым устройством. Взаимодействующее устройство определяет третье направление того же сообщения об измерении и передает данные поддержки на первое устройство на основании третьего направления. Первое устройство сначала определяет первый угол (161) между первым направлением и направлением соединения и определяет третий угол (163) между третьим направлением и направлением соединения с использованием данных поддержки. Затем выполняют проверочный тест на первом расстоянии (151), достоверном расстоянии (150), а также на первом угле и третьем угле. Первое расстояние является надежным, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности (100) устройств. 5 н. и 12 з.п. ф-лы, 11 ил.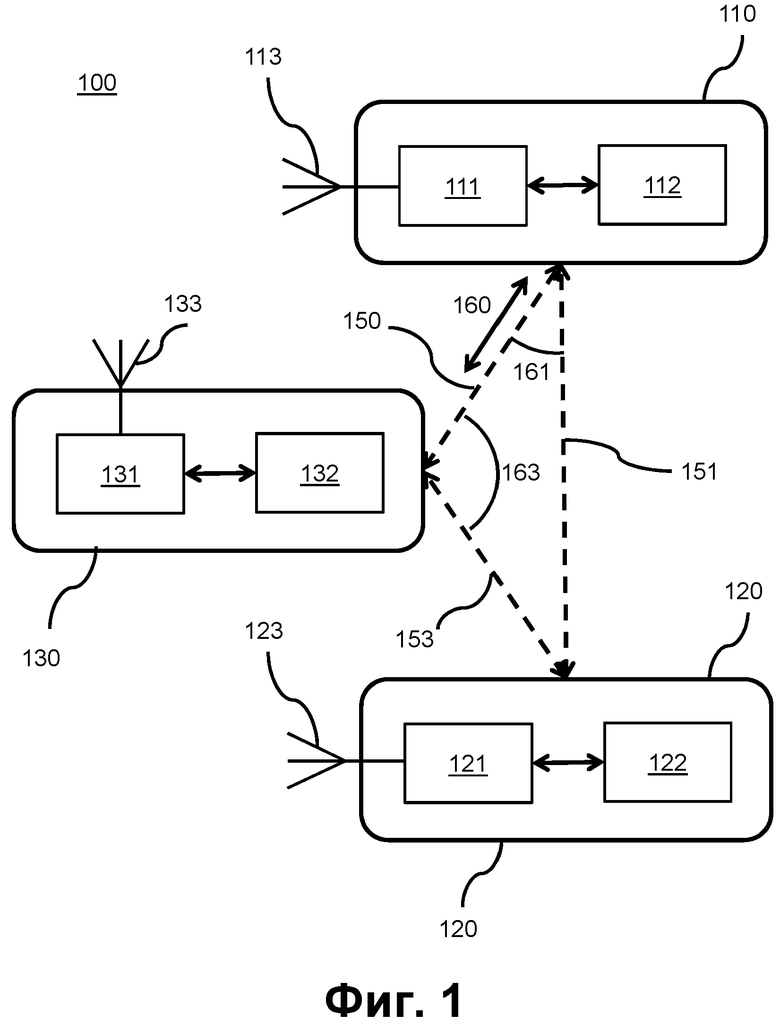
1. Устройство для измерения расстояния посредством беспроводной связи между устройством, действующим в качестве первого устройства (110), и вторым устройством (120) для беспроводной связи,
причем беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, при этом протокол содержит передачу сообщения об измерении вторым устройством;
причем устройство содержит:
- первый приемопередатчик (111) для передачи и приема сообщений,
- первый процессор (112) сообщений, выполненный с возможностью
- обработки сообщений в соответствии с протоколом измерения дальности;
- определения первого времени прихода сообщения об измерении на первом устройстве и
- определения первого расстояния (151) между первым устройством и вторым устройством на основании первого времени прихода;
причем первый приемопередатчик (111) содержит первую направленную антенну (113) для обнаружения направления принятого сигнала, несущего сообщение, а первый процессор (112) сообщений выполнен с возможностью:
- связи с третьим устройством (130), причем третье устройство, действующее в качестве взаимодействующего устройства, расположено на достоверном расстоянии (150) от первого устройства, взаимодействующее устройство использует направление соединения (160) совместно с первым устройством, направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство;
- оценки определенного расстояния;
- определения первого направления при приеме сообщения об измерении на первом устройстве;
- определения первого угла (161) между первым направлением и направлением соединения;
- приема данных поддержки от взаимодействующего устройства, причем данные поддержки содержат указание на третье направление, причем третье направление определяют третьим устройством при приеме сообщения об измерении на третьем устройстве;
- определения третьего угла (163) между третьим направлением и направлением соединения на основании данных поддержки, и
- выполнения проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле, причем проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
2. Устройство по п. 1, в котором проверочный тест включает проверку по теореме косинусов или проверку по неравенству треугольника для приемлемой пространственной совокупности.
3. Устройство по п. 1 или 2, в котором протокол измерения дальности содержит обмен сообщениями, которые криптографически защищены на основании данных ключа, и первый процессор (112) сообщений выполнен с возможностью совместного использования данных ключа с взаимодействующим устройством для обеспечения возможности третьему процессору (132) сообщений криптографически обрабатывать сообщения в соответствии с протоколом измерения дальности.
4. Устройство по любому из предшествующих пунктов, в котором первый процессор (112) сообщений выполнен с возможностью определения достоверного расстояния (150) в соответствии с протоколом измерения дальности, или первый процессор (112) сообщений выполнен с возможностью определения направления (160) соединения с использованием первой направленной антенны (113).
5. Устройство по любому из предшествующих пунктов, в котором
третий процессор (132) сообщений выполнен с возможностью
- определения третьего времени прихода сообщения об измерении на третьем устройстве,
- причем данные поддержки также основаны на третьем времени прихода; и
причем первый процессор (112) сообщений выполнен с возможностью
- определения третьего расстояния (153) между третьим устройством и вторым устройством с использованием данных поддержки, касающихся третьего времени прихода, и
- выполнения проверочного теста также с использованием третьего расстояния.
6. Устройство по любому из предшествующих пунктов, причем устройство содержит часовой блок для обеспечения временной ссылки для определения указанных значений времени прихода, а первый процессор (112) сообщений выполнен с возможностью синхронизации временной ссылки с соответствующим часовым блоком во взаимодействующем устройстве.
7. Устройство по любому из предшествующих пунктов, в котором протокол измерения дальности содержит первое устройство, действующее в качестве инициирующего устройства, отправляющее инициирующее сообщение на второе устройство, в то время как второе устройство после приема инициирующего сообщения должно отправить сообщение об измерении, а первый процессор (112) сообщений выполнен с возможностью
- обмена данными о смене ролей с третьим устройством для обеспечения третьему устройству возможности действия в качестве инициирующего устройства для измерения расстояния;
причем третье устройство при получении данных о смене ролей выполнено с возможностью
- определения третьего расстояния между третьим устройством и вторым устройством согласно протоколу измерения дальности на основании второго сообщения об измерении,
- определения третьего направления при приеме второго сообщения об измерении на третьем устройстве и
- передачи третьих данных поддержки на первое устройство, причем третьи данные поддержки указывают на третье направление;
тогда как первый процессор (112) сообщений выполнен с возможностью
- определения второго направления при приеме второго сообщения об измерении на первом устройстве,
- приема от третьего устройства третьих данных поддержки и
- выполнения проверочного теста также с использованием второго направления и третьих данных поддержки.
8. Устройство по любому из предшествующих пунктов, в котором третий процессор (132) сообщений выполнен с возможностью
- определения мощности третьего сигнала по меньшей мере одного сообщения, принятого от второго устройства, и
- включения данных о мощности третьего сигнала в данные поддержки для первого устройства;
причем первый процессор (112) сообщений выполнен с возможностью
- определения мощности первого сигнала по меньшей мере одного сообщения, принятого от второго устройства, и
- проверки, являются ли надежными определенные расстояния посредством сравнения мощности первого сигнала и мощности третьего сигнала с соответствующими расчетными значениями мощности сигнала на определенных расстояниях.
9. Устройство по любому из предшествующих пунктов, в котором первый процессор (112) сообщений выполнен, после оценки того, что определенное расстояние не является надежным, с возможностью по меньшей мере одного из
- требования выполнения другого протокола безопасности со вторым устройством;
- запроса на дополнительное измерение расстояния с использованием другого протокола измерения дальности и/или другого типа беспроводной связи;
- запрета или ограничения доступа по меньшей мере к некоторым данным и/или по меньшей мере к одной функции в первом устройстве.
10. Устройство по любому из пп. 5-9, в котором в случае признания определенного расстояния надежным первый процессор сообщений выполнен с возможностью объединения результата определения первого расстояния, вычисленного на основании времени прихода, с результатом определения первого расстояния, вычисленного на основании достоверного расстояния и первого и третьего углов.
11. Система для измерения надежного расстояния, содержащая устройство по любому из пп. 1-8, третье устройство, как описано в п. 1, и четвертое устройство, действующее в качестве второго взаимодействующего устройства, расположенное на втором достоверном расстоянии от первого устройства, причем взаимодействующее устройство использует второе направление соединения совместно с первым устройством, и второе направление соединения указывает на направление линии, соединяющей первое устройство и второе взаимодействующее устройство;
причем четвертое устройство содержит
- четвертый беспроводной приемник для приема сообщений, причем приемник содержит четвертую направленную антенну для обнаружения направления принятого сигнала, несущего сообщение,
- четвертый процессор сообщений, выполненный с возможностью
- определения четвертого направления при приеме сообщения об измерении на четвертом устройстве и
- передачи четвертых данных поддержки на первое устройство, причем четвертые данные поддержки указывают на четвертое направление;
причем первый процессор (112) сообщений выполнен с возможностью
- приема четвертых данных поддержки от второго взаимодействующего устройства,
- определения четвертого угла между четвертым направлением и вторым направлением соединения на основании четвертых данных поддержки и
- выполнения проверочного теста также с использованием второго достоверного расстояния и четвертого угла.
12. Система по п. 11, в которой первый процессор (112) сообщений выполнен с возможностью
- выполнения проверочного теста с использованием комбинации первого неравенства треугольника в первой пространственной совокупности из первого устройства, второго устройства и третьего устройства и второго неравенства треугольника во второй пространственной совокупности из первого устройства, второго устройства и четвертого устройства; или
- проверки соответствия первого местоположения второго устройства согласно первой пространственной совокупности второму местоположению второго устройства согласно второй пространственной совокупности; или
- выполнения проверочного теста с использованием проверки несогласованности для определения того, все ли определенные расстояния больше нуля; или
- выполнения проверочного теста на основании настройки, в которой третье устройство и четвертое устройство скомпонованы так, что достоверный угол между линией от третьего устройства к первому устройству и линией от четвертого устройства к первому устройству составляет по меньшей мере 90 градусов; или
- выполнения проверочного теста на основании настройки, в которой третье устройство и четвертое устройство расположены напротив друг друга по отношению к первому устройству; или
- выполнения проверочного теста на основании настройки, в которой второе достоверное расстояние соответствует указанному достоверному расстоянию.
13. Система по п. 11 или 12, содержащая пятое устройство, действующее в качестве третьего взаимодействующего устройства, при этом первое взаимодействующее устройство имеет первое направление соединения, второе взаимодействующее устройство имеет второе направление соединения, а третье взаимодействующее устройство имеет третье направление соединения, причем каждое направление соединения указывает на направление линии, соединяющей первое устройство и соответствующее взаимодействующее устройство, и каждое направление соединения образует угол 90 градусов с другими направлениями соединения,
причем первый процессор (112) сообщений выполнен с возможностью
- выполнения проверочного теста с использованием комбинации неравенств треугольников по меньшей мере в двух пространственных совокупностях, причем каждая совокупность содержит второе устройство и два устройства из комплекта первого устройства и взаимодействующих устройств.
14. Способ измерения расстояния посредством беспроводной связи между первым устройством (110) и вторым устройством (120),
причем беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, при этом протокол содержит передачу сообщения об измерении вторым устройством;
причем первое устройство содержит первую направленную антенну (113) для обнаружения направления принятого сигнала, несущего сообщение;
причем способ включает:
- определение первого расстояния (151) между первым устройством и вторым устройством на основании первого времени прихода сообщения об измерении на первом устройстве,
- связь с третьим устройством (130), причем третье устройство, действующее в качестве взаимодействующего устройства, расположено на достоверном расстоянии (150) от первого устройства, взаимодействующее устройство использует направление соединения (160) совместно с первым устройством, направление соединения указывает направление линии, соединяющей первое устройство и взаимодействующее устройство;
причем третье устройство содержит третью направленную антенну (133) для обнаружения направления принятого сигнала, несущего сообщение, и выполнено с возможностью
- определения третьего направления при приеме сообщения об измерении на третьем устройстве и
- обеспечения данных поддержки, причем данные поддержки указывают на третье направление;
причем способ включает, для оценки определенного расстояния,
- определение первого направления при приеме сообщения об измерении на первом устройстве,
- определение первого угла (161) между первым направлением и направлением соединения;
- определение третьего угла (163) между третьим направлением и направлением соединения на основании данных поддержки,
- выполнение проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле, причем проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
15. Способ по п. 14, включающий
- выдачу инструкции первому устройству действовать в качестве инициирующего устройства для обеспечения первого угла и первого времени прихода или первого расстояния, или
- выдачу инструкции третьему устройству действовать в качестве взаимодействующего устройства для обеспечения данных поддержки, указывающих на третье направление.
16. Способ действия в качестве взаимодействующего устройства при измерении расстояния посредством беспроводной связи между первым устройством (110) и вторым устройством (120),
причем взаимодействующее устройство расположено на достоверном расстоянии (150) от первого устройства, взаимодействующее устройство использует направление соединения (160) совместно с первым устройством, направление соединения указывает на направление линии, соединяющей первое устройство и взаимодействующее устройство;
причем беспроводная связь содержит протокол измерения дальности для определения расстояния между первым и вторым устройствами на основании времени прихода сообщения об измерении на первом устройстве, при этом протокол содержит передачу сообщения об измерении вторым устройством;
первое устройство содержит первую направленную антенну (113) для обнаружения направления принятого сигнала, несущего сообщение, и выполнено с возможностью определения первого расстояния между первым устройством и вторым устройством на основании первого времени прихода сообщения об измерении на первом устройстве,
третье устройство содержит третью направленную антенну (133) для обнаружения направления принятого сигнала, несущего сообщение,
причем способ включает:
- определение третьего направления при приеме сообщения об измерении на третьем устройстве и
- обеспечение данных поддержки, причем данные поддержки указывают на третье направление;
при этом первое устройство для оценки определенного расстояния выполнено с возможностью
- определения первого направления при приеме сообщения об измерении на первом устройстве,
- определения первого угла (161) между первым направлением и направлением соединения;
- определения третьего угла (163) между третьим направлением и направлением соединения на основании данных поддержки,
- выполнения проверочного теста на первом расстоянии, достоверном расстоянии, первом угле и третьем угле, причем проверочный тест принимает первое расстояние как надежное, когда указанные расстояния и углы соответствуют приемлемой пространственной совокупности из первого устройства, второго устройства и взаимодействующего устройства.
17. Компьютерочитаемый носитель, на котором хранится компьютерная программа, причем компьютерная программа содержит инструкции программного для осуществления способа по любому из пп. 14-16 при исполнении на компьютере.

