ОБЛАСТЬ ТЕХНИКИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0001] Настоящая заявка относится к области техники автоматического контроля, в частности, к системе и способу определения запасов штабелей материала для склада сырья.
УРОВЕНЬ ТЕХНИКИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
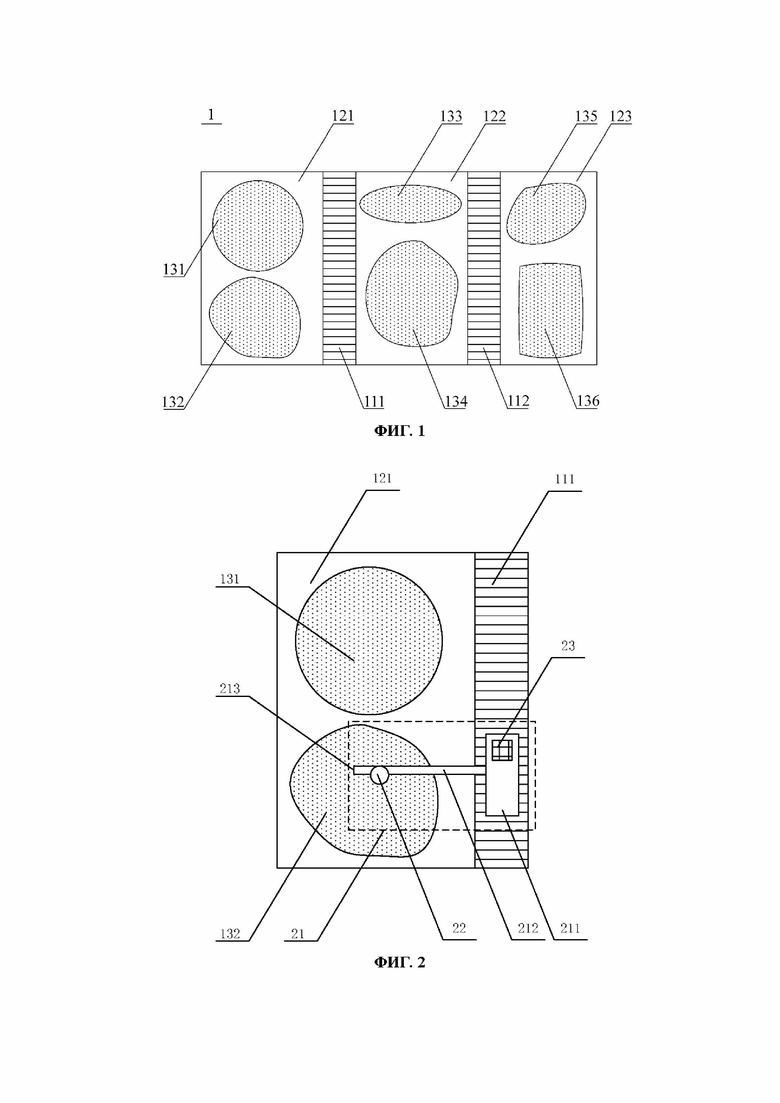
[0002] На промышленном производстве, место хранения сырья называется складом сырья. На ФИГ. 1 представлен вид сверху склада сырья известного уровня техники. Склад сырья 1 включает, по меньшей мере, один путь, например, путь 111 и путь 112, представленные на ФИГ. 1; а также содержит множество зон размещения материала, расположенных параллельно друг другу, как например, зона размещения материала 121, зона размещения материала 122 и зона размещения материала 123, показанные на ФИГ. 1. Путь находится между любыми двумя прилегающими зонами размещения материала и расположен в продольном направлении относительно зон размещения материала. К примеру, путь 111 находится между зоной размещения материала 121 и зоной размещения материала 122, а путь 112 находится между зоной размещения материала 122 и зоной размещения материала 123 для перемещения укладчика-заборщика. Множество штабелей материала уложено в каждой зоне размещения материала. Например, штабель материала 131 и штабель материала 132 уложены в зоне размещения материала 121, штабель материала 133 и штабель материала 134 уложены в зоне размещения материала 122, штабель материала 135 и штабель материала 136 уложены в зоне размещения материала 123.
[0003] Для обеспечения потребностей производства, запасы различного сырья на складе сырья должны соответствовать производственному плану. Инвентаризация запасов относится к подсчету запасов различного сырья и составлению плана снабжения различного сырья согласно информации о запасах и производственному плану.
[0004] При обычных обстоятельствах, запасы различного сырья на складе сырья рассчитывают путем вычитания выходного количества материала из входного количества материала. Тем не менее в процессе транспортировки или хранения легко происходит потеря сырья, так что входные и выходные количества сырья не могут быть точно измерены, что приводит к неточному подсчету запасов сырья и отсутствию возможности для точного проведения инвентаризации запасов.
КРАТКОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0005] В настоящей заявке предложены система и способ инвентаризации запасов штабелей материала для склада сырья, которые могут быть использованы для решения технической проблемы известного уровня техники, связанной с тем, что в процессе транспортировки или хранения, легко происходит потеря сырья, так что входные и выходные количества сырья не могут быть точно измерены, что приводит к неточному подсчету запасов сырья и отсутствию возможности для точного проведения инвентаризации запасов.
[0006] В первом аспекте, в варианте осуществления настоящей заявки предложена система инвентаризации запасов штабелей материала для склада сырья, при этом склад сырья включает пути и множество зон размещения материала, расположенных параллельно друг другу, путь находится между любыми двумя прилегающими зонами размещения материала и расположен в продольном направлении относительно зон размещения материала, и множество штабелей материала уложено в каждой зоне размещения материала; и система инвентаризации запасов штабелей материала включает укладчик-заборщик, сканирующее устройство и управляющий терминал,
[0007] при этом укладчик-заборщик размещен на пути и выполнен с возможностью перемещения вдоль пути из одного конца зоны размещения материала в другой конец зоны размещения материала с заданной скоростью; укладчик-заборщик включает стрелу и корпус, при этом стрела установлена на корпусе и выполнена с возможностью транспортировки сырья к штабелю материала или забора сырья из штабеля материала; разгрузочное устройство или извлекающее устройство выполнено на одном конце стрелы, удаленном от корпуса;
[0008] при этом сканирующее устройство установлено на стреле рядом с разгрузочным портом и выполнено с возможностью однократного сканирования штабелей материала, уложенных в зоне размещения материала, каждый раз, когда укладчик-заборщик продвигается на заданное расстояние, чтобы получить данные сканирования каждой точки отражения на поверхностях штабелей материала; область, сканируемая с помощью сканирующего устройства за один раз, представляет собой область вдоль ширины зоны размещения материала от одной стороны к другой стороне зоны размещения материала;
[0009] при этом управляющий терминал установлен на корпусе укладчика-заборщика и соединен с укладчиком-заборщиком и сканирующим устройством, соответственно, посредством сети; и
[0010] управляющий терминал выполнен с возможностью осуществления следующих этапов:
[0011] получение данных сканирования каждой точки отражения на поверхности штабеля материала, отправленных сканирующим устройством, при этом данные сканирования точки отражения включают расстояние измерения точки отражения и угол измерения точки отражения; расстояние измерения точки отражения относится к расстоянию между точкой отражения и сканирующим устройством; угол измерения точки отражения относится к углу между линией, соединяющей точку отражения со сканирующим устройством, и горизонтальной плоскостью;
[0012] для любого сканирования, определение, согласно расстоянию измерения целевой точки отражения и углу измерения целевой точки отражения, сканируемой в ходе данного сканирования, значений координат целевой точки отражения в системе координат поперечного сечения, при этом система координат поперечного сечения относится к системе координат, перпендикулярной земле, т.е. системе координат, которая устанавливается по положению сканирующего устройства в ходе данного сканирования в качестве начала координат, принимая горизонтальное направление, соответствующее сканирующему устройству, в качестве оси х, и принимая вертикальное направление, соответствующее сканирующему устройству, в качестве оси у;
[0013] определение площади поперечного сечения, соответствующей целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения;
[0014] определение объема штабеля материала согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании; и
[0015] выполнение инвентаризации запасов всех штабелей материала на складе сырья согласно объему и плотности каждого штабеля материала на складе сырья.
[0016] В варианте осуществления первого аспекта, площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
[0017] определение профиля поперечного сечения, соответствующего целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения; и
[0018] расчет профиля поперечного сечения, соответствующего целевой точке отражения, с применением расчетного метода для определения площади поперечного сечения, соответствующей целевой точке отражения.
[0019] В варианте осуществления первого аспекта, значения координат целевой точки отражения в системе координат поперечного сечения, в частности, определяют следующим образом:
[0020] 
[0021] 
[0022] где Рk представляет собой kую точку отражения; Рk⋅х представляет собой значение Рk на оси х в трехмерной системе координат; Рk⋅у представляет собой значение Рk на оси у в трехмерной системе координат; Pk⋅z представляет собой значение Рk на оси z в трехмерной системе координат; Pk⋅u представляет собой значение Рk на оси u в системе координат сканирующего устройства; Pk⋅v представляет собой значение Рk на оси v в системе координат сканирующего устройства; dk представляет собой расстояние измерения Рk; θk представляет собой угол измерения Рk; Lb представляет собой горизонтальное расстояние между сканирующим устройством и путем; I представляет собой положение укладчика-заборщика на пути; Нb представляет собой высоту стрелы от земли; α представляет собой угол поворота относительно поперечной оси стрелы (то есть угол между стрелой и направлением оси х в трехмерной системе координат); и направление оси стрелы относится к соответствующему направлению от одного конца стрелы, соединенного с корпусом, к одному концу стрелы, близкому к штабелю материала.
[0023] В варианте осуществления первого аспекта, профиль поперечного сечения, соответствующий целевой точке отражения, в частности, выражен следующей формулой:
[0024] 
[0025] где P(t) представляет собой уравнение профиля поперечного сечения, соответствующего целевой точке отражения; Nk,p(t) представляет собой базисную функцию В-сплайнов степени р, где р принимает значение 2, t=[0,1]; Рk представляет собой значения координат kой целевой точки отражения в системе координат поперечного сечения; и n представляет собой количество целевых точек отражения.
[0026] В варианте осуществления первого аспекта, площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
[0027] 
[0028] где S представляет собой площадь поперечного сечения, соответствующую целевой точке отражения; Н представляет собой высоту сканирующего устройства от земли; L представляет собой ширину зоны размещения материала; Lb представляет собой расстояние между сканирующим устройством и укладчиком-заборщиком в направлении оси х; ∇1 представляет собой длину шага в направлении оси х; и
[0029] В(х) определяют следующим образом:
[0030] 
[0031] где 
[0032] В варианте осуществления первого аспекта, объем штабеля материала, в частности, определяют следующим образом:
[0033] 
[0034] где V представляет собой объем штабеля материала; Si представляет собой площадь поперечного сечения, соответствующую целевой точке отражения при iом сканировании; ∇d представляет собой расстояние, на которое укладчик-заборщик продвигается при каждом сканировании; i представляет собой количество сканирований; и Ls представляет собой длину зоны размещения материала.
[0035] Во втором аспекте, в варианте осуществления настоящей заявки предложен способ инвентаризации запасов штабелей материала для склада сырья, при этом способ включает:
[0036] получение данных сканирования каждой точки отражения на поверхности штабеля материала, отправленных сканирующим устройством, при этом данные сканирования точки отражения включают расстояние измерения точки отражения и угол измерения точки отражения; расстояние измерения точки отражения относится к расстоянию между точкой отражения и сканирующим устройством; угол измерения точки отражения относится к углу между линией, соединяющей точку отражения со сканирующим устройством, и горизонтальной плоскостью;
[0037] определение, для любого сканирования, согласно расстоянию измерения целевой точки отражения и углу измерения целевой точки отражения, сканируемой в ходе данного сканирования, значений координат целевой точки отражения в системе координат поперечного сечения, при этом система координат поперечного сечения относится к системе координат, которая устанавливается по положению сканирующего устройства в ходе данного сканирования в качестве начала координат, принимая горизонтальное направление, соответствующее сканирующему устройству, в качестве оси х, и принимая вертикальное направление, соответствующее сканирующему устройству, в качестве оси у;
[0038] определение площади поперечного сечения, соответствующей целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения;
[0039] определение объема штабеля материала согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании; и
[0040] выполнение инвентаризации запасов всех штабелей материала на складе сырья согласно объему и плотности каждого штабеля материала на складе сырья.
[0041] В варианте осуществления второго аспекта, площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
[0042] определение профиля поперечного сечения, соответствующего целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения; и
[0043] расчет профиля поперечного сечения, соответствующего целевой точке отражения, с применением расчетного метода для определения площади поперечного сечения, соответствующей целевой точке отражения.
[0044] В варианте осуществления второго аспекта, значения координат целевой точки отражения в системе координат поперечного сечения, в частности, определяют следующим образом:
[0045] 
[0046] 
[0047] где Рk представляет собой kую точку отражения; Рk⋅х представляет собой значение Рk на оси х в трехмерной системе координат; Рk⋅у представляет собой значение Рk на оси у в трехмерной системе координат; Pk⋅z представляет собой значение Рk на оси z в трехмерной системе координат; Pk⋅u представляет собой значение Рk на оси u в системе координат сканирующего устройства; Pk⋅v представляет собой значение Рk на оси v в системе координат сканирующего устройства; dk представляет собой расстояние измерения Рk; θk представляет собой угол измерения Рk; Lb представляет собой горизонтальное расстояние между сканирующим устройством и путем; I представляет собой положение укладчика-заборщика на пути; Нb представляет собой высоту стрелы от земли; α представляет собой угол поворота относительно поперечной оси стрелы (то есть, угол между стрелой и направлением оси х в трехмерной системе координат); и направление оси стрелы относится к соответствующему направлению от одного конца стрелы, соединенного с корпусом, к одному концу стрелы, близкому к штабелю материала.
[0048] В варианте осуществления второго аспекта, профиль поперечного сечения, соответствующий целевой точке отражения, в частности, определяют с помощью следующего уравнения:
[0049] 
[0050] где P(t) представляет собой уравнение профиля поперечного сечения, соответствующего целевой точке отражения; Nk,p(t) представляет собой базисную функцию В-сплайнов степени р, где р принимает значение 2, t=[0,1];
Рk представляет собой значения координат kой целевой точки отражения в системе координат поперечного сечения; и n представляет собой количество целевых точек отражения.
[0051] В варианте осуществления второго аспекта, площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
[0052] 
[0053] где S представляет собой площадь поперечного сечения, соответствующую целевой точке отражения; Н представляет собой высоту сканирующего устройства от земли; L представляет собой ширину зоны размещения материала; Lb представляет собой расстояние между сканирующим устройством и укладчиком-заборщиком в направлении оси х; ∇1 представляет собой длину шага в направлении оси х; и
[0054] В(х) определяют следующим образом:
[0055] 
[0056] где 
[0057] В варианте осуществления второго аспекта, объем штабеля материала, в частности, определяют следующим образом:
[0058] 
[0059] где V представляет собой объем штабеля материала; Si представляет собой площадь поперечного сечения, соответствующую целевой точке отражения при iом сканировании; ∇d представляет собой расстояние, на которое укладчик-заборщик продвигается при каждом сканировании; i представляет собой количество сканирований; и Ls представляет собой длину зоны размещения материала.
[0060] Согласно системе инвентаризации запасов штабелей материала, предложенной в вариантах осуществления настоящей заявки, штабели материала в зонах размещения материала сканируют посредством сканирующего устройства, установленного на стреле укладчика-заборщика. Получают данные сканирования каждой точки отражения на поверхностях штабелей материала. Значения координат точек отражения в системе координат поперечного сечения определяют согласно данным сканирования точек отражения. Кроме того, площади поперечного сечения, соответствующие точкам отражения, определяют согласно значениям координат точек отражения. Более того, определяют объемы штабелей материала. Инвентаризация запасов всех штабелей материала на складе сырья может быть проведена согласно объему и плотности каждого из штабелей материала на складе сырья. При выполнении системой инвентаризации запасов штабелей материала, измерение осуществляют посредством сканирования штабелей материала, что значительно повышает прецизионность и точность инвентаризации запасов и закладывает основу для склада материалов без постоянного присутствия обслуживающего и эксплуатационного персонала. Между тем, устройство характеризуется легкостью монтажа и относительно низкими затратами на техническое обслуживание, что значительно снижает экономические издержки, необходимые для проведения инвентаризации запасов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0061] На ФИГ. 1 представлен вид сверху склада сырья известного уровня техники;
[0062] ФИГ. 2 представляет собой схематическое изображение системы инвентаризации запасов штабелей материала, применимой в варианте осуществления настоящей заявки;
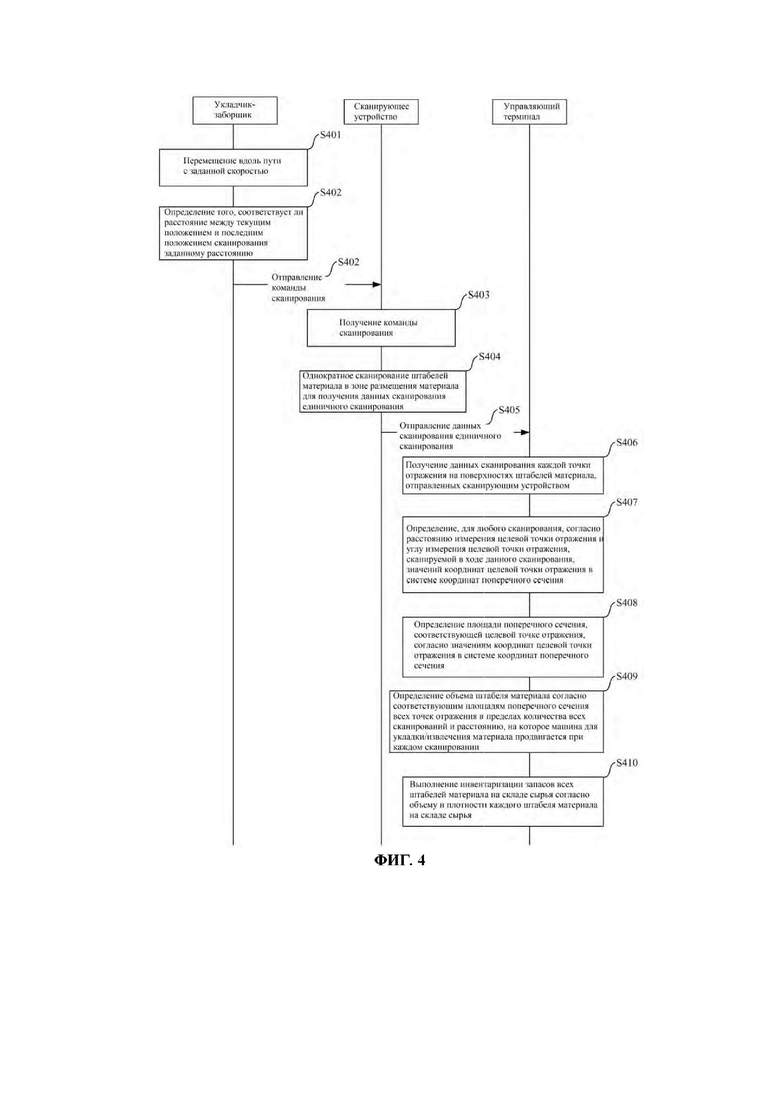
[0063] ФИГ. 3 представляет собой схематическое изображение области сканирования сканирующего устройства;
[0064] ФИГ. 4 представляет собой блок-схему рабочего процесса системы инвентаризации запасов штабелей материала для склада сырья, как представлено в варианте осуществления настоящей заявки;
[0065] ФИГ. 5 представляет собой схематическое изображение данных сканирования точки отражения в варианте осуществления настоящей заявки; и
[0066] ФИГ. 6 представляет собой схематическое изображение системы координат поперечного сечения в варианте осуществления настоящей заявки.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0067] Для разъяснения задач, технических решений и преимуществ настоящей заявки, ниже приведено дополнительное подробное описание вариантов осуществления настоящей заявки со ссылкой на прилагаемые чертежи.
[0068] Система инвентаризации запасов штабелей материала, предложенная в варианте осуществления настоящей заявки, применима на складе сырья. Ссылаясь на ФИГ. 1, склад сырья включает пути, например, путь 111 и путь 112, представленные на ФИГ. 1; а также содержит множество зон размещения материала, расположенных параллельно друг другу, как например, зона размещения материала 121, зона размещения материала 122 и зона размещения материала 123, показанные на ФИГ. 1. Путь находится между любыми двумя прилегающими зонами размещения материала и расположен в продольном направлении относительно зон размещения материала. К примеру, путь 111 находится между зоной размещения материала 121 и зоной размещения материала 122, а путь 112 находится между зоной размещения материала 122 и зоной размещения материала 123 для перемещения укладчика-заборщика. Множество штабелей материала уложено в каждой зоне размещения материала. Например, штабель материала 131 и штабель материала 132 уложены в зоне размещения материала 121, штабель материала 133 и штабель материала 134 уложены в зоне размещения материала 122, штабель материала 135 и штабель материала 136 уложены в зоне размещения материала 123.
[0069] Возможная конструкция системы, применимая в варианте осуществления настоящей заявки, впервые представлена ниже со ссылкой на ФИГ. 2.
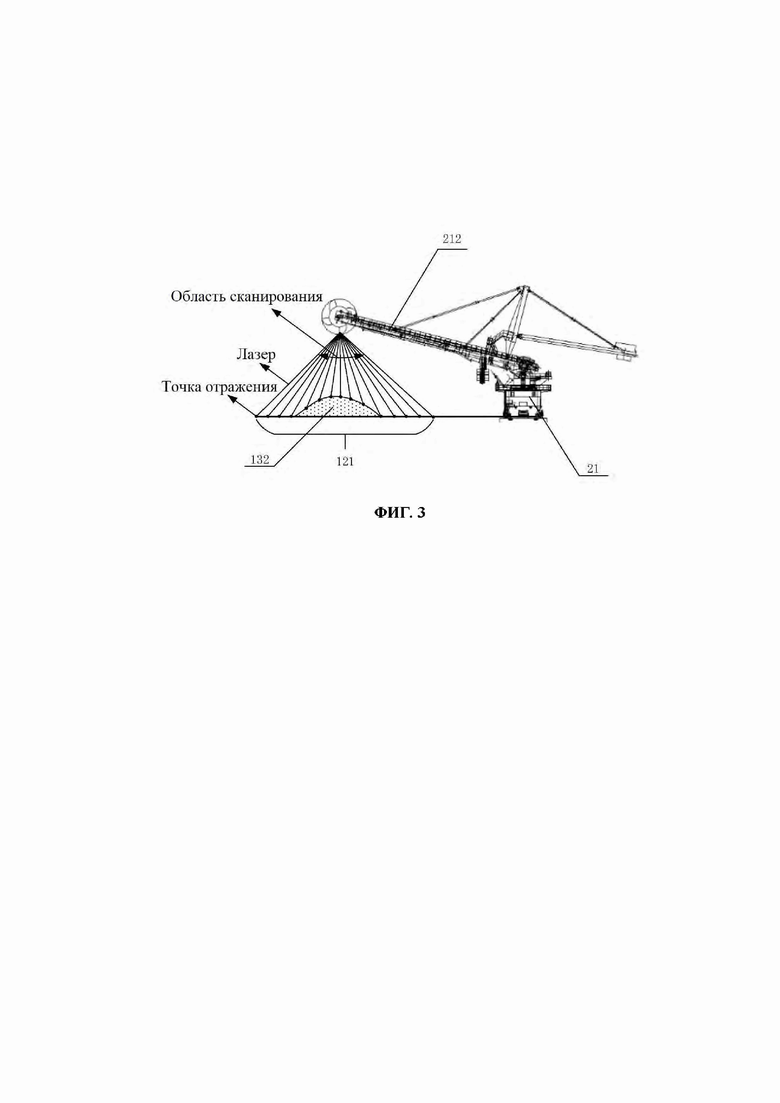
[0070] На ФИГ. 2 представлено схематическое изображение системы инвентаризации запасов штабелей материала, применимой в варианте осуществления настоящей заявки. Система инвентаризации запасов штабелей материала включает укладчик-заборщик 21, сканирующее устройство 22 и управляющий терминал 23.
[0071] Укладчик-заборщик представляет собой новое высокоэффективное погрузочно-разгрузочное оборудование непрерывного действия, которое, главным образом, применяют для погрузки и разгрузки железной руды (песка), угля, песка и т.д. на складах сыпучих материалов, таких как специализированные терминалы сыпучих грузов, металлургические заводы, крупные тепловые электростанции и рудники. Различные типы укладчиков-заборщиков применяют на существующих складах материалов, включая известные роторные укладчики-заборщики, укладчики, заборщик с двумя роторными колесами и скребковый реклаймер полупортального типа.
[0072] Укладчик-заборщик 21 может быть выполнен на пути. Например, укладчик-заборщик 21, представленный на ФИГ. 2, выполнен на пути 111. Укладчик-заборщик 21 может быть выполнен с возможностью перемещения вдоль пути 111 из одного конца зоны размещения материала 121 в другой конец зоны размещения материала с заданной скоростью.
[0073] Также на ФИГ. 2 может быть видно, что укладчик-заборщик 21 включает корпус 211 и стрелу 212, при этом стрела 212 установлена на корпусе 211 и выполнена с возможностью транспортировки сырья к штабелю материала или забора сырья из штабеля материала. Разгрузочное устройство (или извлекающее устройство) 213 выполнено на одном конце стрелы 212, удаленном от корпуса.
[0074] Сканирующее устройство может быть представлено двумерным лазерным сканером. Двумерный лазерный сканер выполнен с возможностью непрерывного излучения лазерных импульсов, так что происходит излучение лазерных импульсов во всех направлениях в пределах угла сканирования с определенным угловым интервалом (угловым разрешением) посредством механизма вращения самого устройства, таким образом, формируя двумерную плоскость сканирования с радиальными координатами в качестве системы координат. Информация о положении измеряемого объекта определяется расстоянием между сканером и объектом, а также соответствующими угловыми данными. То есть, двумерный лазерный сканер позволяет быстро определить данные расстояния в поперечном сечении. Двумерный лазерный сканер обладает такими преимуществами, как широкий диапазон измерения, высокая скорость измерения, высокая точность измерения, стабильные рабочие характеристики, незначительное воздействие пыли и замутненности, а также может успешно применяться в области промышленного контроля.
[0075] Сканирующее устройство 22 установлено на стреле 212 рядом с разгрузочным портом 213 (конкретное положение может быть отрегулировано в соответствии с условиями на площадке) и выполнено с возможностью однократного сканирования штабеля материала (штабеля материала 131 или штабеля материала 132), уложенного в зоне размещения материала, каждый раз, когда укладчик-заборщик 21 продвигается на заданное расстояние, чтобы получить данные сканирования каждой точки отражения на поверхностях штабелей материалов. Область, сканируемая с помощью сканирующего устройства 22 за один раз, представляет собой область вдоль ширины зоны размещения материала 121 от одной стороны к другой стороне зоны размещения материала.
[0076] Например, при единичном сканировании сканирующего устройства 22, на ФИГ. 3 представлено схематическое изображение области сканирования сканирующего устройства, а также на ФИГ. 3 показано продольное сечение зоны размещения материала. Когда сканирующее устройства 22 выполняет одно сканирование, сканирование может быть осуществлено от одной стороны к другой стороне зоны размещения материала, то есть происходит сканирование продольного сечения зоны размещения материала.
[0077] Чтобы данные, сканируемые с помощью сканирующего устройства, в большей степени соответствовали реальным данным штабеля материала, в варианте осуществления настоящей заявки, заданное расстояние, на которое укладчик-заборщик продвигается каждый раз, может контролироваться таким образом, чтобы оно было достаточно небольшим. То есть, каждый раз, когда укладчик-заборщик продвигается на заданное расстояние, данные, сканируемые с помощью сканирующего устройства, в большей степени соответствуют реальным данным штабеля материала. К примеру, укладчик-заборщик может продвигаться на 10 мм за один раз.
[0078] Управляющий терминал 23 установлен на корпусе 211 укладчика-заборщика 21 и соединен с укладчиком-заборщиком 21 и сканирующим устройством 22, соответственно, посредством сети (данный способ соединения не показан на ФИГ. 2).
[0079] В ходе работы системы инвентаризации запасов штабелей материала, различные устройства взаимодействуют друг с другом для проведения инвентаризации запасов штабеля материала. На ФИГ. 4 представлена блок-схема рабочего процесса системы инвентаризации запасов штабелей материала для склада сырья, как предложено в варианте осуществления настоящей заявки.
[0080] Укладчик-заборщик 21 выполнен с возможностью осуществления следующих этапов 401-405.
[0081] На этапе 401, укладчик-заборщик 21 перемещается вдоль пути с заданной скоростью.
[0082] На этапе 402, команду сканирования отправляют на сканирующее устройство, если расстояние между текущим положением и предыдущим положением сканирования соответствует заданному расстоянию.
[0083] Положение укладчика-заборщика может быть определено различными способами. Широко используемые способы определения включают энкодер на основе технологии радиочастотной идентификации, шину Грея, радар дальнего действия и т.д., которые, в частности, не ограничены.
[0084] Сканирующее устройство 22 выполнено с возможностью осуществления следующих этапов 403-405.
[0085] На этапе 403, получают команду сканирования.
[0086] На этапе 404, штабели материала в зоне размещения материала сканируют один раз для получения данных сканирования единичного сканирования.
[0087] Следует отметить, что, при выполнении сканирования сканирующим устройством 22, стрела укладчика-заборщика расположена перпендикулярно пути, таким образом, повышая точность данных сканирования.
[0088] На этапе S405, данные сканирования единичного сканирования отправляют на управляющий терминал.
[0089] Управляющий терминал 23 выполнен с возможностью осуществления следующих этапов 406-410.
[0090] На этапе 406, получают данные сканирования каждой точки отражения на поверхностях штабелей материала, отправленные сканирующим устройством.
[0091] Данные сканирования точки отражения включают расстояние измерения точки отражения и угол измерения точки отражения. Расстояние измерения точки отражения относится к расстоянию между точкой отражения и сканирующим устройством; и угол измерения точки отражения относится к углу между линией, соединяющей точку отражения со сканирующим устройством, и осью стрелы.
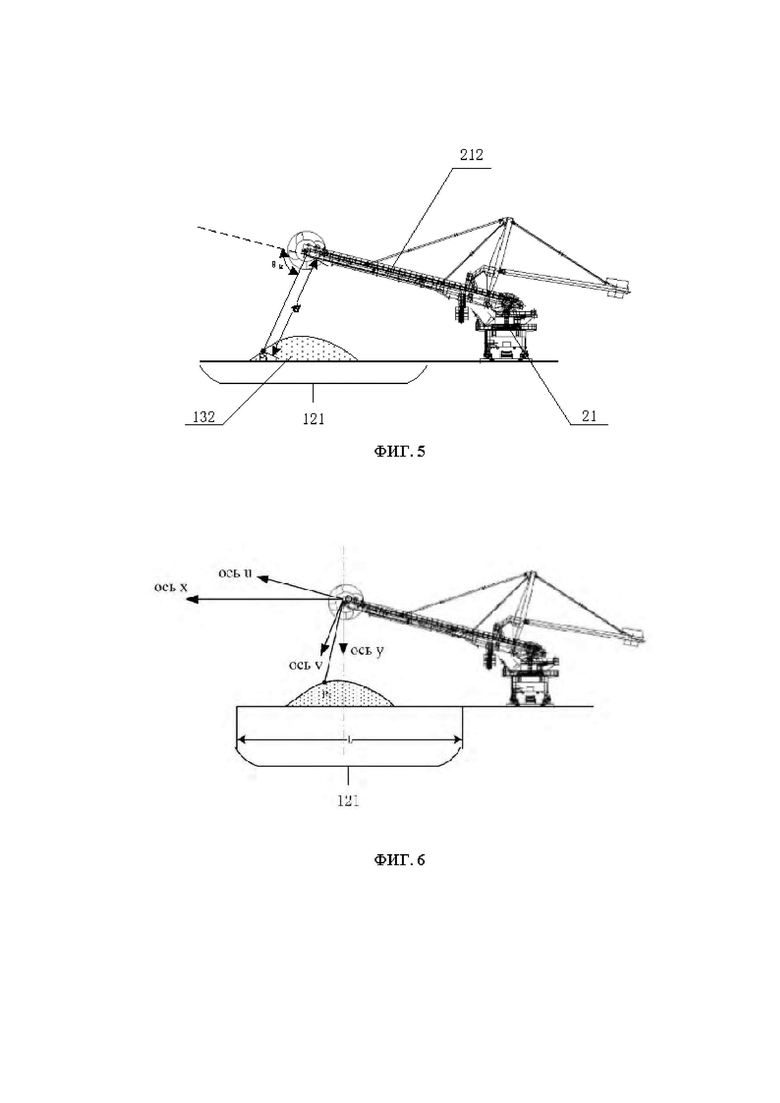
[0092] ФИГ. 5 представляет собой схематическое изображение данных сканирования точки отражения в варианте осуществления настоящей заявки. Как видно на ФИГ. 5, сканирующее устройство 22 излучает лазерные импульсы. Лазерный импульс формирует точку отражения Рk на поверхности штабеля материала 132, расстояние между точкой отражения Рk и сканирующим устройством 22 (то есть, расстояние измерения точки отражения) обозначено как dk, а угол между линией, соединяющей точку отражения со сканирующим устройством, и осью стрелы (то есть, угол измерения точки отражения) обозначен как θк.
[0093] В частности, расстояние измерения dk точки отражения определяют с применением метода времени пролета. Когда лазерный излучатель испускает лазерные импульсы, внутренний таймер начинает отсчет времени (обозначено как Т1); когда волна, образуемая лазерным излучением, попадает на объект, часть энергии возвращается; и когда лазерный приемник принимает отраженную волну, образованную лазерным излучением, внутренний таймер останавливается (обозначено как Т2). Поскольку скорость света с известна, расстояние измерения dk=(T2-T1)*c точки отражения может быть измерено.
[0094] Угол измерения θk точки отражения может быть предварительно задан с помощью сканирующего устройства, которое в данном документе подробно не описано.
[0095] Кроме того, данные, полученные управляющим устройством (то есть, данные сканирования каждой точки отражения на поверхностях штабелей материала и количество сканирований, соответствующее данным сканирования каждой точки отражения) могут храниться в виде таблицы. Как показано в Таблице 1, в качестве примера приведены данные, полученные управляющим устройством.
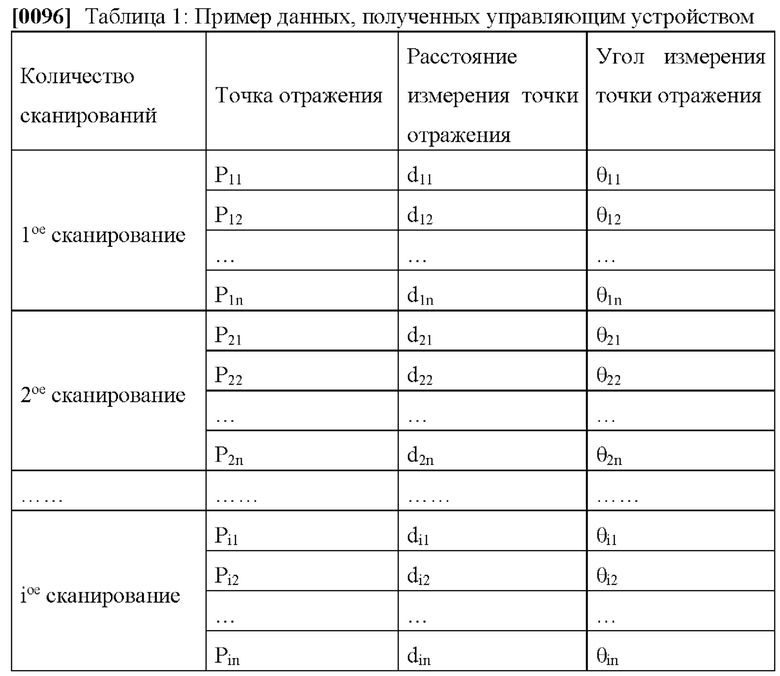
[0097] Как видно из Таблицы 1, при выполнении сканирующим устройством первого сканирования, соответствующие точки отражения включают Р11, Р12……Р1n, при этом P1n представляет nую точку отражения, сканируемую с помощью сканирующего устройства в ходе первого сканирования, где n представляет собой целое число, превышающее или равное 1, и значение n, в частности, не ограничено; расстояние измерения точки отражения Р11 представляет собой d11, расстояние измерения точки отражения Р12 представляет собой d12, расстояние измерения точки отражения Р13 представляет собой d13, и расстояние измерения точки отражения P1n представляет собой d1n; и угол измерения точки отражения Р11 представляет собой θ11, угол измерения точки отражения P12 представляет собой θ12, угол измерения точки отражения Р13 представляет собой θ13, и угол измерения точки отражения P1n представляет собой θ1n. Аналогичным образом, для данных сканирования сканирующего устройства при первом сканировании и данных сканирования при iом сканировании, может быть сделана ссылка на содержание, представленное в Таблице 1, которое не описано в данном документе отдельно.
[0098] На этапе 407, для любого сканирования, согласно расстоянию измерения целевой точки отражения и углу измерения целевой точки отражения, сканируемой в ходе данного сканирования, определяют значения координат целевой точки отражения в системе координат поперечного сечения.
[0099] Принимая в качестве примера Таблицу 1, для первого сканирования, согласно содержанию, представленному в Таблице 1, целевые точки отражения, сканируемые при данном сканировании, включают Р11, Р12……P1n; для второго сканирования, согласно содержанию, представленному в Таблице 1, целевые точки отражения, сканируемые при данном сканировании, включают P21, Р22……Р2n; и для iого сканирования, согласно содержанию, представленному в Таблице 1, целевые точки отражения, сканируемые при данном сканировании, включают Рi1, Pi2……Pin.
[00100] На ФИГ. 6 представлено схематическое изображение системы координат поперечного сечения в варианте осуществления настоящей заявки.
[00101] Система координат поперечного сечения относится к системе координат, перпендикулярной земле, т.е. системе координат, которая устанавливается по положению сканирующего устройства 22 в ходе данного сканирования в качестве начала координат, принимая горизонтальное направление, соответствующее сканирующему устройству 22, в качестве оси х, и принимая вертикальное направление, соответствующее сканирующему устройству 22, в качестве оси у.
[00102] В системе координат сканирующего устройства, сканирующее устройство принято в качестве центра окружности, а направление оси стрелы - в качестве оси u, и, как показано на ФИГ. 6, указано направление изнутри наружу стрелы, и ось, перпендикулярная оси стрелы, принята в качестве оси v. Угол измерения сканирующего устройства составляет ноль градусов в направлении оси u и увеличивается в направлении против часовой стрелки, то есть угол измерения в направлении оси v составляет 90 градусов.
[00103] Как видно на ФИГ. 6, расстояние измерения целевой точки отражения обозначено как dk; угол измерения целевой точки отражения обозначен как θk; высота стрелы от земли обозначена как Н; ширина зоны размещения материала обозначена как L; и расстояние между сканирующим устройством и укладчиком-заборщиком в направлении оси х обозначено как L0.
[00104] Данные пространственного положения целевой точки отражения в системе координат зоны размещения материала, в частности, определяют с помощью следующей формулы (1):
[00105] 
[00106] где Рk представляет собой kую точку отражения; Рk⋅х представляет собой значение Рk на оси х в трехмерной системе координат; Рk⋅у представляет собой значение Рk на оси у в трехмерной системе координат;
Pk⋅z представляет собой значение Рk на оси z в трехмерной системе координат; Pk⋅u представляет собой значение Рk на оси u в системе координат сканирующего устройства; Pk⋅v представляет собой значение Рk на оси v в системе координат сканирующего устройства; Lb представляет собой горизонтальное расстояние между сканирующим устройством и путем; I представляет собой положение укладчика-заборщика на пути; Нb представляет собой высоту стрелы от земли; α представляет собой угол поворота относительно поперечной оси стрелы (то есть, угол между стрелой и направление оси х в трехмерной системе координат); и направление оси стрелы относится к соответствующему направлению от одного конца стрелы, соединенного с корпусом, к одному концу стрелы, близкому к штабелю материала.
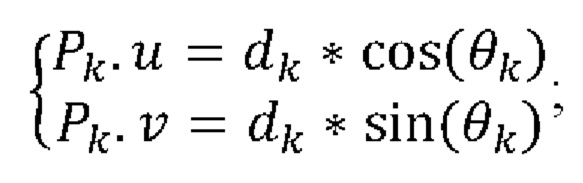
[00107] Кроме того, Pk⋅u и Pk⋅v могут быть определены с помощью следующей формулы (2):
[00108] 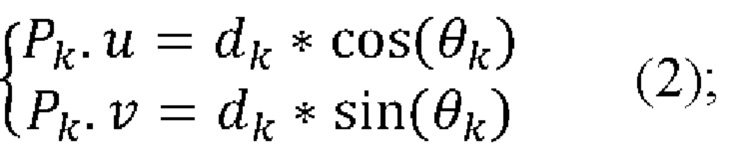
[00109] где dk представляет собой расстояние измерения Рk; и θk представляет собой угол измерения Рk.
[00110] На этапе 408, площадь поперечного сечения, соответствующую целевой точке отражения, определяют согласно значениям координат целевой точки отражения в системе координат поперечного сечения.
[00111] В частности, профиль поперечного сечения, соответствующий целевой точке отражения, может быть определен сначала согласно значениям координат целевой точки отражения в системе координат поперечного сечения; и профиль поперечного сечения, соответствующий целевой точке отражения, рассчитывают с применением расчетного метода для определения площади поперечного сечения, соответствующей целевой точке отражения.
[00112] Профиль поперечного сечения, соответствующий целевой точке отражения, в частности, определяют с помощью следующей формулы (3):
[00113] 
[00114] где P(t) представляет собой уравнение профиля поперечного сечения, соответствующего целевой точке отражения; Nk,p(t) представляет собой базисную функцию В-сплайнов степени р, где р принимает значение 2, t=[0,1]; Рk представляет собой значения координат kой целевой точки отражения в системе координат поперечного сечения; и n представляет собой количеством целевых точек отражения.
[00115] Следует отметить, что формула (3) представляет собой уравнение кривой интерполяции В-сплайна, подобранное в соответствии с измеренными n дискретными точками данных Р.
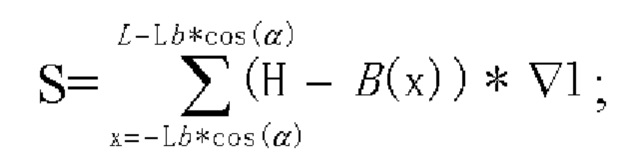
[00116] После определения профиля поперечного сечения, соответствующего целевой точке отражения, площадь поперечного сечения, соответствующая целевой точке отражения, может быть определена с помощью следующей формулы (4):
[00117] 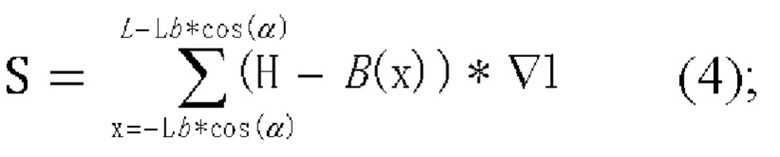
[00118] где S представляет собой площадь поперечного сечения, соответствующую целевой точке отражения; Н представляет собой высоту сканирующего устройства от земли; L представляет собой ширину зоны размещения материала; Lb представляет собой расстояние между сканирующим устройством и укладчиком-заборщиком в направлении оси х; ∇1 представляет собой длину шага в направлении оси х; и
[00119] В(х) определяют следующим образом:
[00120] 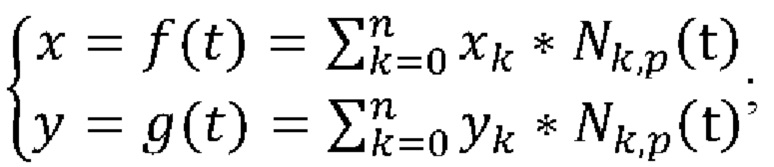
[00121] где  На этапе 409, объем штабеля материала определяют согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании.
На этапе 409, объем штабеля материала определяют согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании.
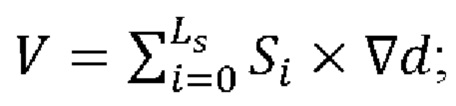
[00122] В частности, объем штабеля материала может быть определен с помощью следующей формулы (5):
[00123] 
[00124] где V представляет собой объем штабеля материала; Si представляет собой площадь поперечного сечения, соответствующую целевой точке отражения при iом сканировании; ∇d представляет собой расстояние, на которое укладчик-заборщик продвигается при каждом сканировании; i представляет собой количество сканирований; и Ls представляет собой длину зоны размещения материала.
[00125] На этапе 410, выполняют инвентаризацию запасов всех штабелей материала на складе сырья согласно объему и плотности каждого штабеля материала на складе сырья.
[00126] В случае, когда различные материалы уложены в штабели материала, плотность штабеля материала также отличается. В вариантах осуществления настоящей заявки, плотность штабеля материала может быть определена согласно соответствующим материалам различных штабелей материала.
[00127] Кроме того, выполняют инвентаризацию запасов всех штабелей материала на складе сырья, т.е. необходимо подсчитать запасы штабелей материала. Для любого штабеля материала, запасы штабелей материала могут быть определены с помощью следующей формулы (6):
[00128] 
[00129] где mj представляет собой запас jого штабеля материала на складе сырья; ρj представляет собой плотность jого штабеля материала на складе сырья; и Vj - представляет собой объем jого штабеля материала на складе сырья.
[00130] Согласно системе инвентаризации запасов штабелей материала, предложенной в варианте осуществления настоящей заявки, штабели материала в зонах размещения материала сканируют посредством сканирующего устройства, установленного на стреле укладчика-заборщика. Получают данные сканирования каждой точки отражения на поверхностях штабелей материала. Значения координат точек отражения в системе координат поперечного сечения определяют согласно данным сканирования точек отражения. Кроме того, площади поперечного сечения, соответствующие точкам отражения, определяют согласно значениям координат точек отражения. Более того, определяют объемы штабелей материала. Инвентаризация запасов всех штабелей материала на складе сырья может быть проведена согласно объему и плотности каждого из штабелей материала на складе сырья. При выполнении системой инвентаризации запасов штабелей материала, измерение осуществляют посредством сканирования штабелей материала, что значительно повышает прецизионность и точность инвентаризации запасов и закладывает основу для склада материалов без постоянного присутствия обслуживающего и эксплуатационного персонала. Между тем, устройство характеризуется легкостью монтажа и относительно низкими затратами на техническое обслуживание, что значительно снижает экономические издержки, необходимые для проведения инвентаризации запасов.
[00131] Ниже приведен вариант осуществления способа согласно настоящей заявке, который может быть использован для реализации варианта осуществления системы согласно настоящей заявке. Подробности, которые не раскрыты в варианте осуществления способа согласно настоящей заявке, см. в варианте осуществления системы согласно настоящей заявке.
[00132] В варианте осуществления настоящей заявки предложен способ распознавания штабелей материала для склада сырья. Способ включает:
[00133] получение данных сканирования каждой точки отражения на поверхности штабеля материала, отправленных сканирующим устройством, при этом данные сканирования точки отражения включают расстояние измерения точки отражения и угол измерения точки отражения; расстояние измерения точки отражения относится к расстоянию между точкой отражения и сканирующим устройством; угол измерения точки отражения относится к углу между линией, соединяющей точку отражения со сканирующим устройством, и осью стрелы;
[00134] определение, для любого сканирования, согласно расстоянию измерения целевой точки отражения и углу измерения целевой точки отражения, сканируемой в ходе данного сканирования, значений координат целевой точки отражения в системе координат поперечного сечения, при этом система координат поперечного сечения относится к системе координат, перпендикулярной земле, т.е. системе координат, которая устанавливается по положению сканирующего устройства в ходе данного сканирования в качестве начала координат, принимая горизонтальное направление, соответствующее сканирующему устройству, в качестве оси х, и принимая вертикальное направление, соответствующее сканирующему устройству, в качестве оси у;
[00135] определение площади поперечного сечения, соответствующей целевой точке отражения, согласно значениям координат точки отражения в системе координат поперечного сечения;
[00136] определение объема штабеля материала согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании; и
[00137] выполнение инвентаризации запасов всех штабелей материала на складе сырья согласно объему и плотности каждого штабеля материала на складе сырья.
[00138] При необходимости, площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
[00139] определение профиля поперечного сечения, соответствующего целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения; и
[00140] расчет профиля поперечного сечения, соответствующего целевой точке отражения, с применением расчетного метода для определения площади поперечного сечения, соответствующей целевой точке отражения.
[00141] При необходимости, значения координат целевой точки отражения в системе координат поперечного сечения, в частности, определяют следующим образом:
[00142] 
[00143] 
[00144] где Рk представляет собой kую точку отражения; Рk⋅х представляет собой значение Рk на оси х в трехмерной системе координат; Рk⋅у представляет собой значение Рk на оси у в трехмерной системе координат; Pk⋅z представляет собой значение Рk на оси z в трехмерной системе координат; Pk⋅u представляет собой значение Рk на оси u в системе координат сканирующего устройства; Pk⋅v представляет собой значение Рk на оси v в системе координат сканирующего устройства; dk представляет собой расстояние измерения Рk; θk представляет собой угол измерения Рk; Lb представляет собой горизонтальное расстояние между сканирующим устройством и путем; I представляет собой положение укладчика-заборщика на пути; Нb представляет собой высоту стрелы от земли; α представляет собой угол поворота относительно поперечной оси стрелы (то есть, угол между стрелой и направлением оси х в трехмерной системе координат); и направление оси стрелы относится к соответствующему направлению от одного конца стрелы, соединенного с корпусом, к одному концу стрелы, близкому к штабелю материала.
[00145] При необходимости, профиль поперечного сечения, соответствующий целевой точке отражения, в частности, определяют с помощью следующего уравнения:
[00146] 
[00147] где P(t) представляет собой уравнение профиля поперечного сечения, соответствующего целевой точке отражения; Nk,p(t) представляет собой базисную функцию В-сплайнов степени р, где р принимает значение 2, t=[0,1]; Рk представляет собой значения координат kой целевой точки отражения в системе координат поперечного сечения; и n представляет собой количество целевых точек отражения.
[00148] При необходимости, площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
[00149] 
[00150] где S представляет собой площадь поперечного сечения, соответствующую целевой точке отражения; Н представляет собой высоту сканирующего устройства от земли; L представляет собой ширину зоны размещения материала; Lb представляет собой расстояние между сканирующим устройством и укладчиком-заборщиком в направлении оси х; ∇1 представляет собой длину шага в направлении оси х; и
[00151]В(х) определяют следующим образом:
[00152] 
[00153] где 
[00154] При необходимости, объем штабеля материала, в частности, определяют следующим образом:
[00155] 
[00156] где V представляет собой объем штабеля материала; Si представляет собой площадь поперечного сечения, соответствующую целевой точке отражения при iом сканировании; ∇d представляет собой расстояние, на которое укладчик-заборщик продвигается при каждом сканировании; i представляет собой количество сканирований; и Ls представляет собой длину зоны размещения материала.
[00157] Согласно приведенному выше способу, штабели материала в зонах размещения материала сканируют для получения данных сканирования каждой точки отражения на поверхностях штабелей материала. Значения координат точек отражения в системе координат поперечного сечения определяют согласно данным сканирования точек отражения. Кроме того, площади поперечного сечения, соответствующие точкам отражения, определяют согласно значениям координат точек отражения. Более того, определяют объемы штабелей материала. Инвентаризация запасов всех штабелей материала на складе сырья может быть проведена согласно объему и плотности каждого из штабелей материала на складе сырья. При использовании способа для выполнения инвентаризации запасов штабелей материала, измерение осуществляют посредством сканирования штабелей материала, что значительно повышает прецизионность и точность инвентаризации запасов и закладывает основу для склада материалов без постоянного присутствия обслуживающего и эксплуатационного персонала. Между тем, устройство характеризуется легкостью монтажа и относительно низкими затратами на техническое обслуживание, что значительно снижает экономические издержки, необходимые для проведения инвентаризации запасов.
[00158] В вариантах осуществления, представленных в настоящей заявке, могут быть приведены ссылки на аналогичные части друг друга. Конкретные варианты осуществления, приведенные выше, представляют собой только несколько примеров в соответствии с сущностью настоящей заявки и не ограничивают объем правовой охраны настоящей заявки. Для специалистов в данной области техники, любые другие варианты осуществления, расширенные в соответствии с решениями настоящей заявки без приложения творческих усилий, подпадают в объем правовой охраны настоящей заявки.
Группа изобретений относится к системе и способу определения запасов штабелей материала для склада сырья. Система включает укладчик-заборщик, сканирующее устройство и управляющий терминал. Штабели материала в зонах размещения материала сканируют посредством сканирующего устройства, установленного на стреле укладчика-заборщика. Получают данные сканирования каждой точки отражения на поверхностях штабелей материала. Значения координат точек отражения в системе координат поперечного сечения определяют согласно данным сканирования точек отражения. Кроме того, площади поперечного сечения, соответствующие точкам отражения, определяют согласно значениям координат точек отражения. Более того, определяют объемы штабелей материала. Инвентаризация запасов всех штабелей материалов на складе сырья может быть проведена согласно объему и соответствующей плотности каждого штабеля из штабелей материала на складе сырья. Также представлен способ инвентаризации запасов штабелей материала для склада сырья. Когда система выполняет инвентаризацию запасов штабелей материала (131, 132, 133, 134, 135, 136), измерение осуществляют посредством сканирования штабелей материала, что значительно повышает прецизионность и точность инвентаризации запасов и закладывает основу для склада материалов без постоянного присутствия обслуживающего и эксплуатационного персонала. Технический результат - повышение точности определения объема штабелей ввиду исключения человеческого фактора. 2 н. и 8 з.п. ф-лы, 6 ил., 1 табл.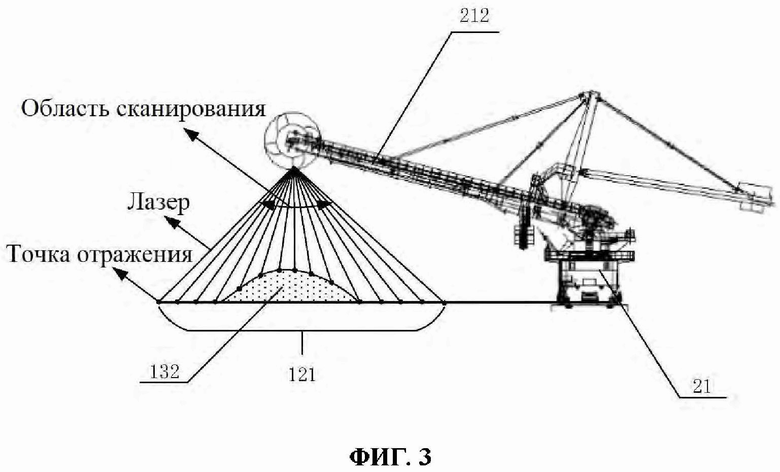
1. Система определения запасов штабелей материала для склада сырья, при этом склад сырья включает пути и множество зон размещения материала, расположенных параллельно друг другу, путь находится между любыми двумя прилегающими зонами размещения материала и расположен в продольном направлении относительно зоны размещения материала; отличающаяся тем, что система определения запасов штабелей материала включает укладчик-заборщик, сканирующее устройство и управляющий терминал;
при этом укладчик-заборщик размещен на пути и выполнен с возможностью перемещения вдоль пути из одного конца зоны размещения материала в другой конец зоны размещения материала с заданной скоростью; укладчик-заборщик включает стрелу и корпус, при этом стрела установлена на корпусе и выполнена с возможностью транспортировки сырья к штабелю материала или забора сырья из штабеля материала; разгрузочное устройство или извлекающее устройство выполнено на одном конце стрелы, удаленном от корпуса;
при этом сканирующее устройство установлено на стреле рядом с разгрузочным портом и выполнено с возможностью однократного сканирования штабелей материала, уложенных в зоне размещения материала, каждый раз, когда укладчик-заборщик продвигается на заданное расстояние, чтобы получить данные сканирования каждой точки отражения на поверхностях штабелей материала; область, сканируемая с помощью сканирующего устройства за один раз, представляет собой область вдоль ширины зоны размещения материала от одной стороны к другой стороне зоны размещения материала;
при этом управляющий терминал установлен на корпусе укладчика-заборщика и соединен с укладчиком-заборщиком и сканирующим устройством, соответственно, посредством сети; и
при этом управляющий терминал выполнен с возможностью осуществления следующих этапов:
получение данных сканирования каждой точки отражения на поверхности штабеля материала, отправленных сканирующим устройством, при этом данные сканирования точки отражения включают расстояние измерения точки отражения и угол измерения точки отражения; расстояние измерения точки отражения относится к расстоянию между точкой отражения и сканирующим устройством; угол измерения точки отражения относится к углу между линией, соединяющей точку отражения со сканирующим устройством, и осью стрелы;
определение, для любого сканирования, согласно расстоянию измерения целевой точки отражения и углу измерения целевой точки отражения, сканируемой в ходе данного сканирования, значений координат целевой точки отражения в системе координат поперечного сечения, при этом система координат поперечного сечения относится к системе координат, перпендикулярной земле, т.е. системе координат, которая устанавливается по положению сканирующего устройства в ходе данного сканирования в качестве начала координат, принимая горизонтальное направление, соответствующее сканирующему устройству, в качестве оси х, и принимая вертикальное направление, соответствующее сканирующему устройству, в качестве оси у;
определение площади поперечного сечения, соответствующей целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения;
определение объема штабеля материала согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании; и
выполнение определения запасов всех штабелей материала на складе сырья согласно объему и плотности каждого штабеля материала на складе сырья.
2. Система определения запасов штабелей материала по п. 1, отличающаяся тем, что площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
определение профиля поперечного сечения, соответствующего целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения; и
расчет профиля поперечного сечения, соответствующего целевой точке отражения, с применением расчетного метода для определения площади поперечного сечения, соответствующей целевой точке отражения.
3. Система определения запасов штабелей материала по п. 2, отличающаяся тем, что значения координат целевой точки отражения в системе координат поперечного сечения, в частности, определяют следующим образом:

где Рk представляет собой kю точку отражения; Рk⋅х представляет собой значение Рk на оси х в трехмерной системе координат; Рk⋅у представляет собой значение Рk на оси у в трехмерной системе координат; Pk⋅z представляет собой значение Рk на оси z в трехмерной системе координат; Pk⋅u представляет собой значение Рk на оси u в системе координат сканирующего устройства; Pk⋅v представляет собой значение Рk на оси v в системе координат сканирующего устройства; dk представляет собой расстояние измерения Рk; θk представляет собой угол измерения Рk; Lb представляет собой горизонтальное расстояние между сканирующим устройством и путем; I представляет собой положение укладчика-заборщика на пути; Нb представляет собой высоту стрелы от земли; α представляет собой угол поворота относительно поперечной оси стрелы (то есть угол между стрелой и направлением оси х в трехмерной системе координат); и направление оси стрелы относится к соответствующему направлению от одного конца стрелы, соединенного с корпусом, к одному концу стрелы, близкому к штабелю материала.
4. Система определения запасов штабелей материала по п. 3, отличающаяся тем, что профиль поперечного сечения, соответствующий целевой точке отражения, в частности, выражен следующим уравнением:

где P(t) представляет собой уравнение профиля поперечного сечения, соответствующего целевой точке отражения; Nk,p(t) представляет собой базисную функцию В-сплайнов степени р, где р принимает значение 2, t=[0,1]; Рk представляет собой значения координат kй целевой точки отражения в системе координат поперечного сечения; и n представляет собой количество целевых точек отражения.
5. Система определения запасов штабелей материала по п. 4, отличающаяся тем, что площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
где S представляет собой площадь поперечного сечения, соответствующую целевой точке отражения; Н представляет собой высоту сканирующего устройства от земли; L представляет собой ширину зоны размещения материала; Lb представляет собой расстояние между сканирующим устройством и укладчиком-заборщиком в направлении оси х; ∇1 представляет собой длину шага в направлении оси х; и
В(х) определяют следующим образом:

где 
6. Система определения запасов штабелей материала по п. 5, отличающаяся тем, что объем штабеля материала, в частности, определяют следующим образом:
где V представляет собой объем штабеля материала; Si представляет собой площадь поперечного сечения, соответствующую целевой точке отражения при iм сканировании; ∇d представляет собой расстояние, на которое укладчик-заборщик продвигается при каждом сканировании; i представляет собой количество сканирований; и Ls представляет собой длину зоны размещения материала.
7. Способ определения запасов штабелей материала для склада сырья, отличающийся тем, что включает:
получение данных сканирования каждой точки отражения на поверхности штабеля материала, отправленных сканирующим устройством, при этом данные сканирования точки отражения включают расстояние измерения точки отражения и угол измерения точки отражения; расстояние измерения точки отражения относится к расстоянию между точкой отражения и сканирующим устройством; угол измерения точки отражения относится к углу между линией, соединяющей точку отражения со сканирующим устройством, и осью стрелы;
определение, для любого сканирования, согласно расстоянию измерения целевой точки отражения и углу измерения целевой точки отражения, сканируемой в ходе данного сканирования, значений координат целевой точки отражения в системе координат поперечного сечения, при этом система координат поперечного сечения относится к системе координат, перпендикулярной земле, т.е. системе координат, которая устанавливается по положению сканирующего устройства в ходе данного сканирования в качестве начала координат, принимая горизонтальное направление, соответствующее сканирующему устройству, в качестве оси х, и принимая вертикальное направление, соответствующее сканирующему устройству, в качестве оси у;
определение площади поперечного сечения, соответствующей целевой точке отражения, согласно значениям координат целевой точки отражения в системе координат поперечного сечения;
определение объема штабеля материала согласно соответствующим площадям поперечного сечения всех точек отражения в пределах количества всех сканирований и расстоянию, на которое укладчик-заборщик продвигается при каждом сканировании; и
выполнение определения запасов всех штабелей материала на складе сырья согласно объему и плотности каждого штабеля материала на складе сырья.
8. Способ определения запасов штабелей материала по п. 7, отличающийся тем, что площадь поперечного сечения, соответствующую целевой точке отражения, в частности, определяют следующим образом:
определение профиля поперечного сечения, соответствующего целевой точке отражения, согласно значениям координат точки отражения в системе координат поперечного сечения; и
расчет профиля поперечного сечения, соответствующего целевой точке отражения, с применением расчетного метода для определения площади поперечного сечения, соответствующей целевой точке отражения.
9. Способ определения запасов штабелей материала по п. 8, отличающийся тем, что значения координат целевой точки отражения в системе координат поперечного сечения, в частности, определяют следующим образом:
где Рk представляет собой kю точку отражения; Рk⋅х представляет собой значение Рk на оси х в трехмерной системе координат; Рk⋅у представляет собой значение Рk на оси у в трехмерной системе координат; Pk⋅z представляет собой значение Рk на оси z в трехмерной системе координат; Pk⋅u представляет собой значение Рk на оси u в системе координат сканирующего устройства; Pkv представляет собой значение Рk на оси v в системе координат сканирующего устройства; dk представляет собой расстояние измерения Рk; θk представляет собой угол измерения Рk; Lb представляет собой горизонтальное расстояние между сканирующим устройством и путем; I представляет собой положение укладчика-заборщика на пути; Нb представляет собой высоту стрелы от земли; α представляет собой угол поворота относительно поперечной оси стрелы (то есть, угол между стрелой и направлением оси х в трехмерной системе координат); и направление оси стрелы относится к соответствующему направлению от одного конца стрелы, соединенного с корпусом, к одному концу стрелы, близкому к штабелю материала.
10. Способ определения запасов штабелей материала по п. 9, отличающийся тем, что профиль поперечного сечения, соответствующий целевой точке отражения, в частности, выражен следующим уравнением:

где P(t) представляет собой уравнение профиля поперечного сечения, соответствующего целевой точке отражения; Nk,p(t) представляет собой базисную функцию В-сплайнов степени р, где р принимает значение 2, t=[0,1]; Рk представляет собой значения координат kй целевой точки отражения в системе координат поперечного сечения; и n представляет собой количество целевых точек отражения.
| CN 110065754 A, 30.07.2019 | |||
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОБЪЕМА ДВИЖУЩЕГОСЯ ГРУЗА, ИМЕЮЩЕГО СЛОЖНУЮ ГЕОМЕТРИЧЕСКУЮ ФОРМУ | 2020 |
|
RU2734085C1 |
| CN 102980512 A, 20.03.2013 | |||
| JP 10338356 A, 22.12.1998. | |||
