Изобретение относится к системам контроля движения транспорта с крупногабаритным грузом и предназначено для автоматического измерения линейных размеров (ширины, высоты, длины), вычисления диаметров, площади сечения и объема грузов, находящихся на движущихся транспортных средствах.
Применение заявленного изобретения особенно актуально в случаях, когда обычными методами измерить объём и другие геометрические параметры затруднено, в силу сложной формы груза: перевозка на транспорте труб, круглых лесоматериалов,
Известно устройство для определения объема груза в кузове движущегося автомобиля (SU 1323861 A1, 15.07.1987) в котором реализовано устройство для бесконтактного определения степени загрузки движущегося автомобиля Определение объема груза происходит методом численного интегрирования расстояний от фиксированной плоскости до поверхности груза с помощью дальномеров поперечного ряда. При попадании капота автомобиля в область действия очередного дальномера продольного ряда через коммутатор последовательно опрашиваются дальномеры поперечного ряда. Измеренные расстояния преобразуются в преобразователе, умножаются в перемножителе на весовые коэффициенты, поступающие с выхода дешифратора, и накапливаются в сумматоре. После окончания определения объема груза включается блок.
Недостатки известного устройства заключаются в том, что для определения объема движущегося груза используются лишь дальномеры, которые в силу погодных условий или внешних помех могут давать ошибочные значения дальности. Также, недостатком известного устройства является то, что дальномеры располагают строго определенным образом, а именно шаг между дальномерами поперечного ряда выбирается таким образом, чтобы при максимальной скорости движения автомобиля его передний край проходил между дальномерами продольного ряда. Это, в свою очередь, усложняет конструкцию для определения объема движущегося груза. Кроме того, устройство не позволяет производить визуальный контроль технического состояния транспорта.
Наиболее близкой по технической сущности к предлагаемому техническому решению является автоматизированная система коммерческого осмотра поездов и вагонов (RU 2682148 C1, 14.03.2019) которая содержит над рельсовым путем П-образную несущую конструкцию, включающую две опоры и ригель, телевизионные камеры, электронно-вычислительную машину, монитор, сканирующие лазерные дальномеры, блок формирования изображения контура вагона, блок сравнения, блок хранения информации о предельном железнодорожном габарите, блок хранения информации о форме боковых поверхностей и крыш вагонов, блок построения рельефа распределения груза по площади полувагона, блок вычисления объема груза, блок вычисления веса груза, контроллеры идентификации промежутков между вагонами и цифровой логический элемент.
Недостатком известной системы является отсутствие контроля температуры дальномером, отсутствие модуля весового контроля ТС с грузом, для последующего вычисления плотности груза, отсутствие модуля измерения расстояния и синхронизации, расположенный в конце площадки, которое позволяет измерять расстояние до груза в каждый момент времени для последующей обработки и повышения надежности и точности вычисления объема груза. Также недостатком известной системы является то, что все дальномеры и датчики настроены на строго определенный угол сканирования, что не позволяет достичь более широкого охвата сканирования груза. Также недостатком является то, что измеряется объём груза, который имеет форму, сопоставимую с формой вагона, что не позволяет измерить объем груза, имеющего сложную геометрическую форму.
Технической задачей заявленного изобретения является устранения вышеуказанных недостатков.
Техническим результатом заявленного изобретения является измерение перевозимых грузов на автотранспорте и железной дороге без остановки и разгрузки, повышение эффективности грузоконтроля, а также повышение надежности конструкции устройства, повышение работоспособности устройства в различных погодных условиях, определение объёма движущегося груза, имеющего сложную геометрическую форму.
Технический результат достигается тем, что предложено устройство для бесконтактного измерения объема движущегося груза, имеющего сложную геометрическую форму, включающее измерительную часть и обрабатывающую часть, причем
- измерительная часть представляет собой площадку с металлоконструкциями и расположенными на ней измерительным и регистрирующим оборудованием, а именно
а) фотометрические сканеры в количестве 5 штук (СК1-СК5), причем СК1 и СК2 расположены вертикально, на боковой рамке металлоконструкции, СК4 и СК5 расположены вертикально, на боковой рамке металлоконструкции противоположно СК1 и СК2, а СК3 расположен горизонтально на верхней части металлоконструкции, причем СК1-СК5 имеют различные углы разворота:
СК1, СК5 – угол разворота лежит в пределах от -30° до +30° для получения точек, лежащих на границе конструкции ТС и нижней части груза,
СК2, СК3, СК4 – угол разворота лежит в пределах от -60° до +60° для получения точек, лежащих на поверхностях боковых и верхних частей груза, причем сканеры устанавливают таким образом, что бы обеспечивалась единая 2D плоскость сканирования груза и обеспечивалось получение максимального количество точек на поверхности груза,
б) регистрирующие модули - К1, К2, К3, представляющие собой телевизионные фотокамеры, размещаются по кругу на конструкции в определенном порядке:
К1 располагается на боковой рамке металлоконструкции,
К3 располагается на боковой рамке металлоконструкции противоположно К1,
К2 располагается на верхней части металлоконструкции,
для получения максимальной фото- и/или видеоинформации с поверхности груза, причем К1, К2, К3 откалиброваны так, что они создают панорамный снимок груза при движении,
в) регистрирующие модули КТ1, КТ2, которые находятся вне рамки металлоконструкции и расположены под углом 45 градусов к оси движения груза таким образом, чтобы получать снимки передней и задней торцевой части груза, причем КТ1 и КТ2 откалиброваны в плоскости сканирования таким образом, чтобы вычислить площадь торцевой поверхности груза, а также площади отдельных его частей, в движении,
г) модуль измерения расстояния и синхронизации (СК-6), расположенный в конце площадки, позволяет измерять расстояние до груза в каждый момент времени с частотой обновления не менее 50 Гц,
причем каждый из модулей имеет внутренний обогрев или помещается в термобоксах,
причем устройство также содержит датчик измерения температуры окружающей среды (ОС) и датчики измерения температуры, внутри модулей (ВМ), для управления системой включения обогрева модулей, при достижении предела минусовой температуры ОС и включения принудительной вентиляции модулей, при достижении предела плюсовой температуры ВМ,
- обрабатывающая часть состоит из одного или нескольких компьютерных системных блоков, с помощью которых обеспечивается получение данных для измерения ширины и высоты груза, площади торцовых частей, диаметра груза и вычисления с использованием измеренных данных объема груза сложной формы, а также для управления работой всех модулей, расположенных в измерительной части установки.
В частных случаях реализации изобретения устройство дополнительно содержит систему сбора данных, которая оснащена модулем получения данных с устройств весового контроля ТС с грузом, для последующего вычисления плотности груза.
В частных случаях реализации изобретения полученные обрабатывающей частью данные содержат одно или несколько из: координаты точек, фото и видео информация при проведении измерении от модулей, расположенных в измерительной части установки.
В частных случаях реализации изобретения устройство дополнительно содержит модуль управления движением транспортным потоком.
Экспериментальные данные показали, что технический результат достигается во всех указанных диапазонах.
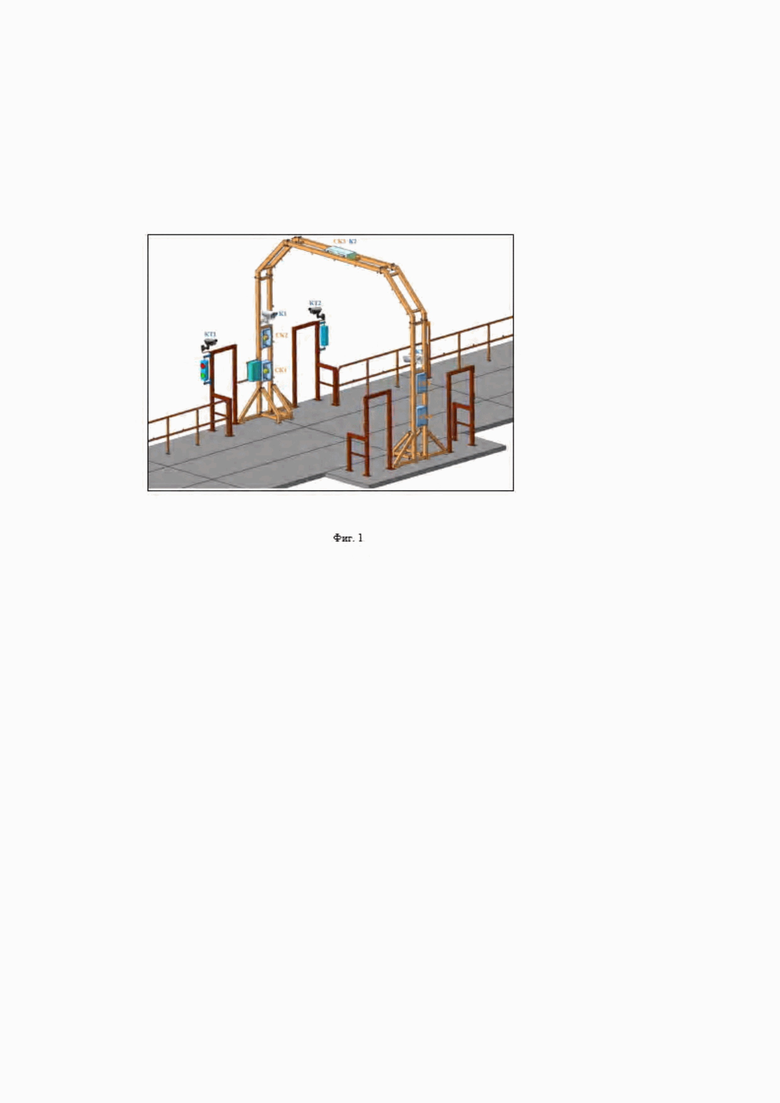
На фиг. 1 представлен внешний вид устройства и пример размещения оборудования и модулей.
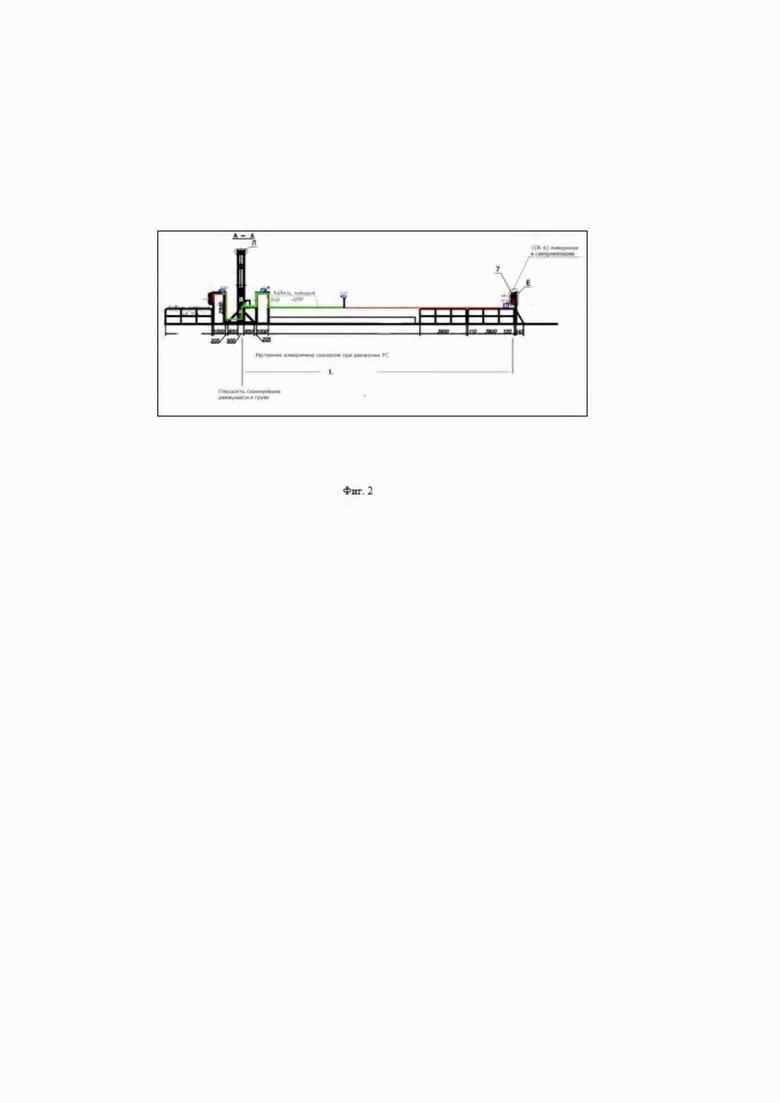
На фиг. 2 представлена синхронизация процесса измерения.
На фиг. 3 - 6 представлены примеры получения изображения с модулей К1, К2, К3, КТ1, КТ2.
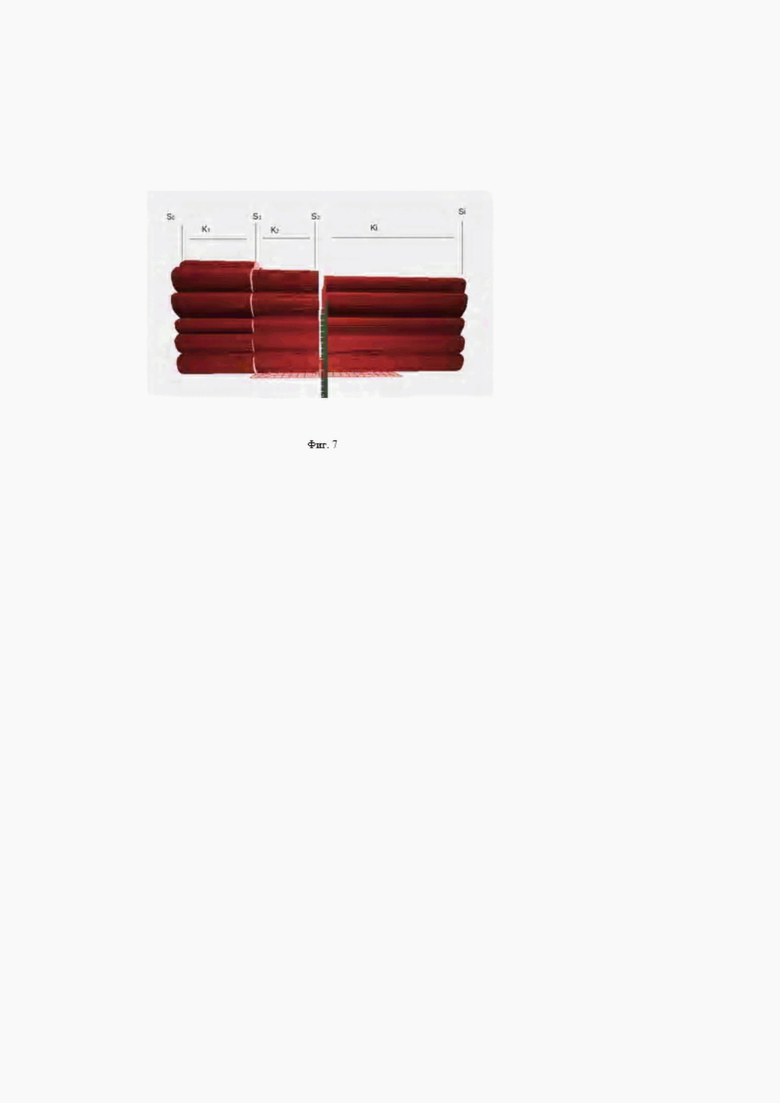
На фиг. 7 – 12 представлены иллюстрации расчета крупногабаритного груза, имеющего сложную геометрическую форму.
На фиг. 13 представлен пример вычисления диаметров.
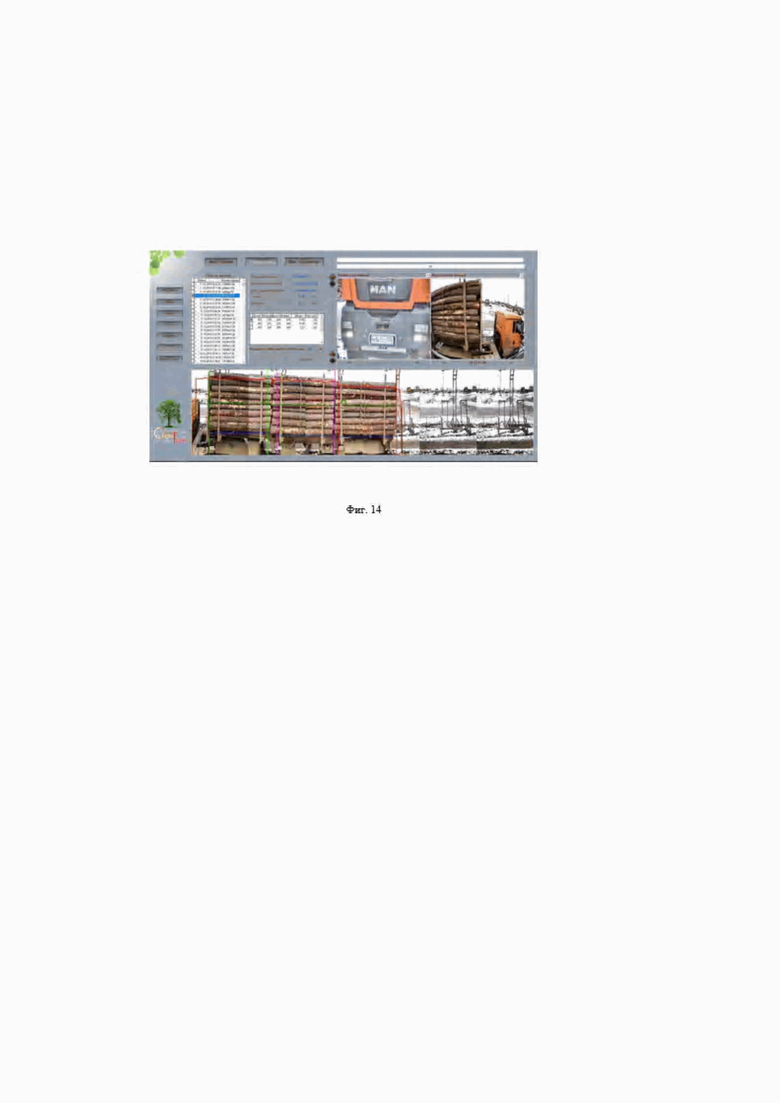
На фиг. 14 представлен общий вид программного окна.
Вариант реализации устройства представляет собой блочно-модульную структуру, разделенную на две части: измерительная и обрабатывающая. Измерительная часть представляет собой площадку с металлоконструкциями и расположенными на ней измерительном и регистрирующем оборудовании в особом порядке (фиг. 1). При этом габариты основной металлоконструкции (рамки) должны обеспечивать свободный проезд через ее створ транспортного средства с грузом, а также размещение измерительных модулей и модулей регистрации внешнего вида груза, номера ТС и др., чтобы получить максимальное количество измеренных точек на поверхности груза и качественных снимков груза.
Всё измерительное оборудование, размещенное на рамке, образует единую «плоскость сканирования» проходящего свозь ее створ груза (фиг. 1).
Измерительные модули СК1-СК5 (фотометрические датчики-сканеры), регистрирующие модули КБ1, КБ2, КВ1 (откалиброванные фотокамеры) размещаются на конструкции в верхней части, слева и права от груза, в определенных точках, для получения максимальной информации с поверхности груза с каждой стороны.
Причем СК1 - СК5 реализованы таким образом, что, в случае необходимости и в зависимости от размеров и габаритов груза, они способны автоматически изменять угол сканирования, т.е. имеют различные углы разворота:
СК1, СК5 – угол разворота лежит в пределах от -30° до +30° для получения точек, лежащих на границе конструкции ТС и нижней части груза
СК2, СК3, СК4 – угол разворота лежит в пределах от -60° до +60° для получения точек, лежащих на поверхностях боковых и верхних частей груза, причем сканеры устанавливают таким образом, чтобы обеспечивалась единая 2D плоскость сканирования груза и обеспечивалось получение максимального количество точек на поверхности груза
Такое расположение оборудования позволяет измерять ширину и высоту груза, а также площадь сечения, диаметр груза и вычислить объем груза сложной формы.
Регистрирующие модули К1, К2, К3 и др. также располагаются в определенных точках для получения полной фото и/или виде информации о грузе, а именно
К1 располагается на боковой рамке металлоконструкции,
К3 располагается на боковой рамке металлоконструкции противоположно К1,
К2 располагается на верхней части металлоконструкции,
для получения максимальной фото и/или видео информации с поверхности груза, причем К1, К2, К3 откалиброваны так, что они создают панорамный снимок груза при движении (фиг. 6).
Устройство также содержит регистрирующие модули КТ1, КТ2, которые являются телевизионными камерами, расположены под углом 45 градусов к оси движения груза таким образом, чтобы получать снимки передней и задней торцевой части груза (фиг. 6).
Для измерения длины груза в устройстве используется модуль измерения расстояния и синхронизации (СК-6) процесса сканирования груза, движущегося в створе рамки («плоскости сканирования») (фиг. 2).
Модуль измерения расстояния и синхронизации, расположенный в конце площадки, позволяет измерять расстояние до груза в каждый момент времени (с частотой обновления не менее 50 Гц). Такое расположение СК-6 позволяет передать в обрабатывающий модуль, отсканированные контуры поверхности груза (создающие 2D Плоскость сечения груза), по времени и пройденному расстоянию, для точного определения геометрии единого груза или состоящего из частей.
Установка также может содержать модуль управления движением транспортным потоком, включающий различные устройства управления движением потока, например, светофоры, информационное освещение или систему знаков. Причем, установка может быть использована как с односторонним движением, так и с двусторонним. Причем установка может быть использована как в прямом, так и в обратном движении транспорта.
Все оборудование имеет внутренний обогрев или помещается в термобоксах, что позволяет работать в широком диапазоне внешних температур. Причем устройство также содержит датчик измерения температуры окружающей среды (ОС) и датчики измерения температуры, внутри модулей (ВМ), для управления системой включения обогрева модулей в автоматическом или ручном режиме, при достижении предела минусовой температуры ОС и включения принудительной вентиляции модулей, при достижении предела плюсовой температуры ВМ.
Система сбора данных оснащена универсальным модулем, для получения данных с устройств весового контроля ТС с грузом, для последующего вычисления плотности груза.
Обрабатывающая часть состоит из одного или нескольких компьютерных системных блоков, с помощью которых обеспечивается получение данных (координаты точек, фото- и видеоинформация при проведении измерений), управление работой всех модулей, расположенных в измерительной части установки.
Принцип, по которому построена работа измерительного модуля, основан на триангуляции, широко применяемой в оптических методах измерения. Этот метод заключается в использовании отражения света от поверхности объекта, для измерения искомого значение (расстояние до любой точки груза), по известным правилам и законам геометрии.
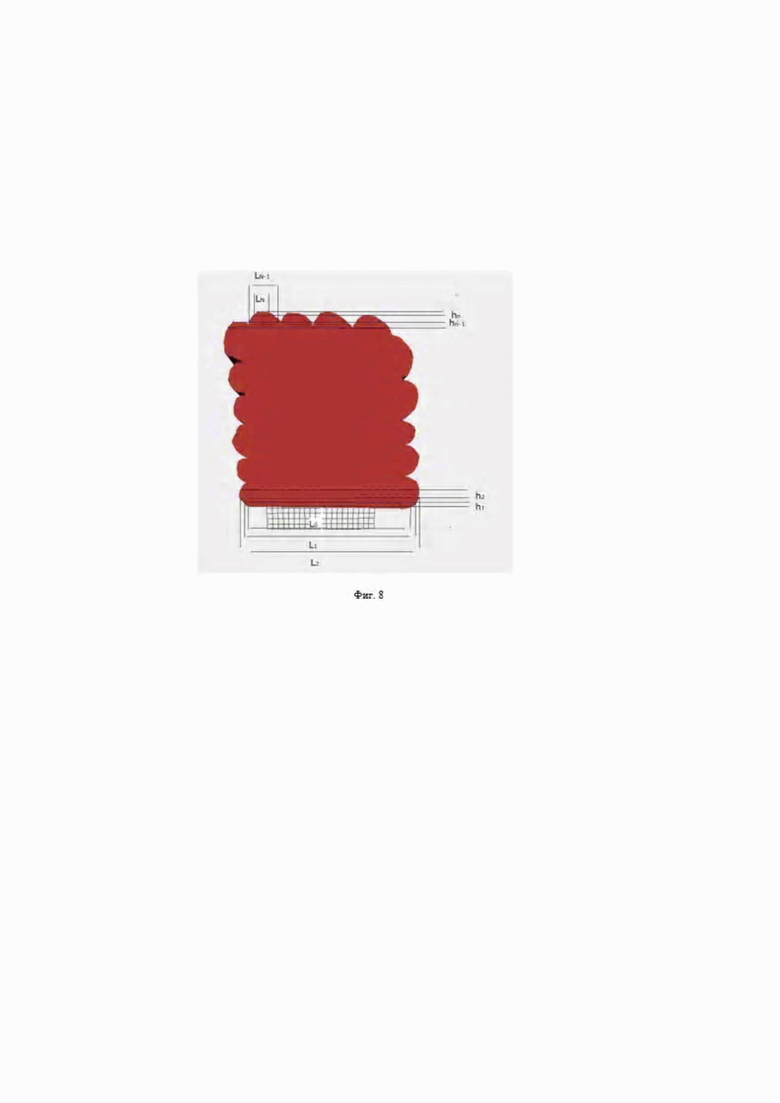
Вычисление площади сечения груза производится из полученных данных от всех измерительных модулей в 2D плоскости (фиг. 8). Вся плоская фигура груза разбивается на n прямоугольных трапеции, площадь каждой фигуры вычисляется как по формуле:
S1=1/2(L0 +L1) x h1, ... , Sn=1/2(LN-1 +LN) x hn
Площадь всей фигуры вычисляется как сумма всех трапеций по формуле:
Для вычисления объёма сложная фигура разбивается на i отрезков (фиг. 7). Объём фигуры вычисляется как сумма всех фигур по формуле:
При движении груза в плоскости сканирования измерительные и регистрирующие модули передают в обрабатывающий модуль координаты точек, лежащих на поверхности груза, видео-и фотоинформацию. После обработки всех полученных точек ПО установки выдает результат измеренных габаритов (ширина, высота, длина), изображение груза, регистрационный номер или иной признак идентификации транспортного средства или груза.
Пример реализации.
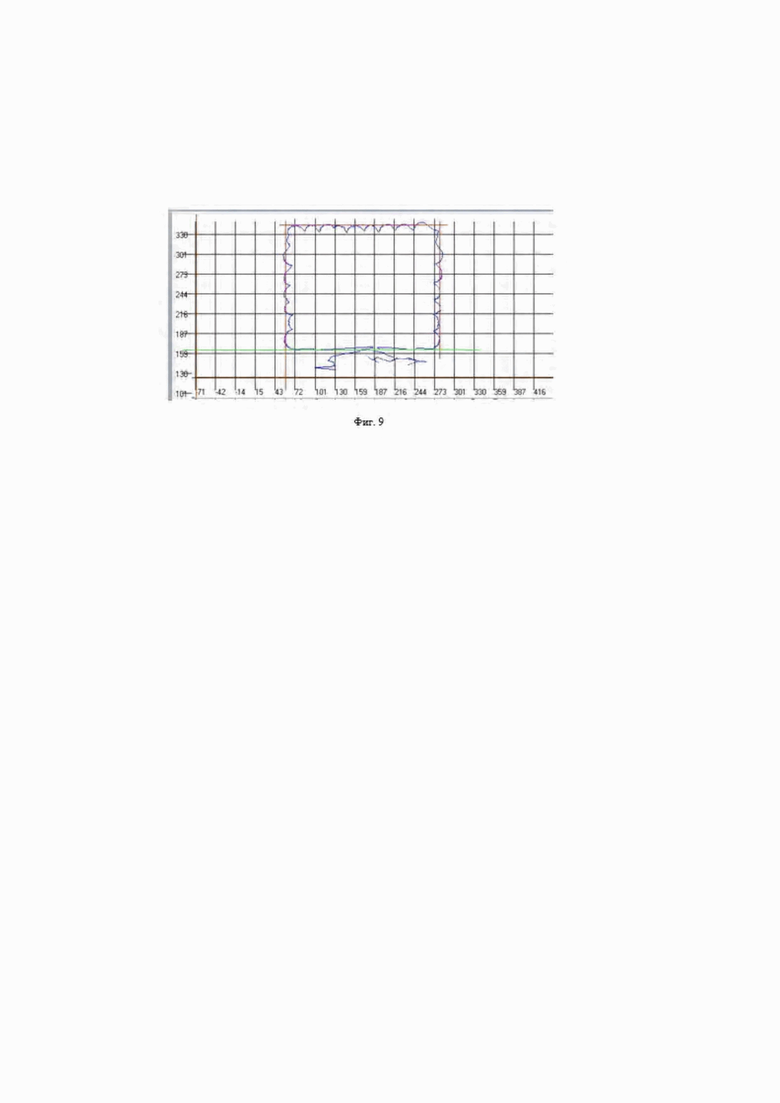
При измерении, например, движущегося штабеля с древесиной, измерительные модули передают в обрабатывающий модуль координаты точек, которые образуют профиль бревен, уложенных на лесовозе.
Для каждого профиля находятся линии с наибольшим количеством точек, лежащих в одной плоскости (красные линии). Зеленая линия определяет «нижнюю границу штабеля». Это линия, проходящая по видимой части нижнего бревна, лежащего на платформе (фиг. 9).
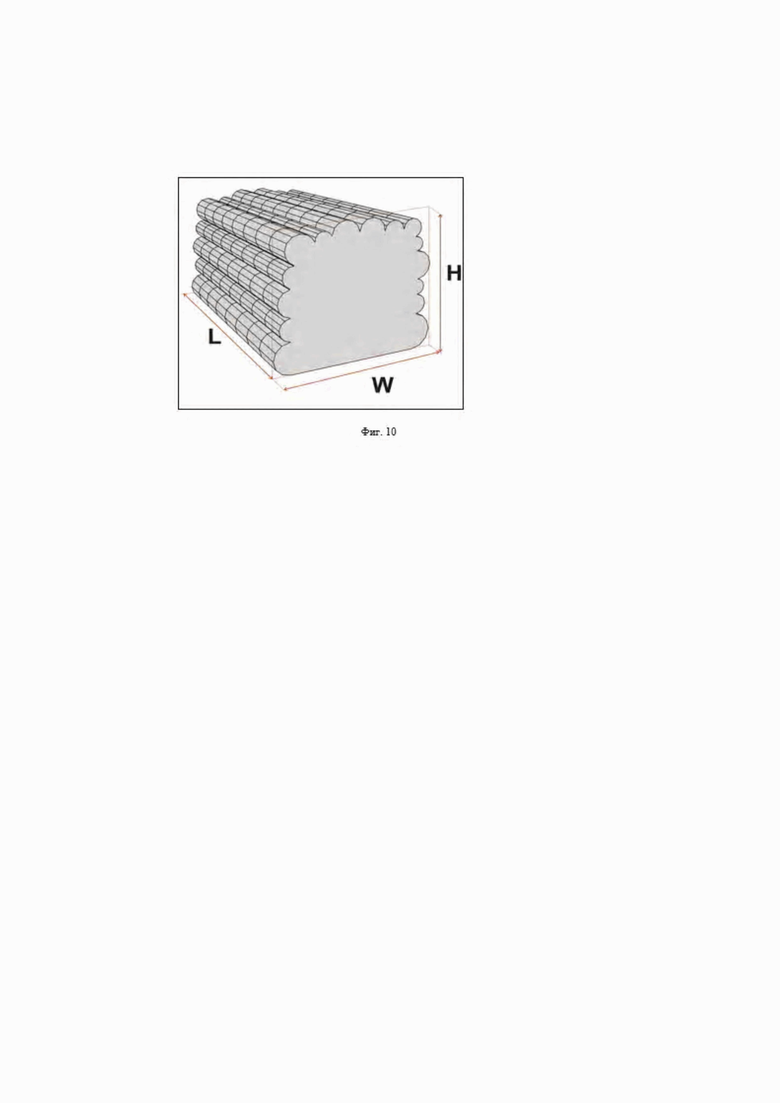
Полученный профиль штабеля проходит дальнейшую обработку. Затем производятся вычисления ширины, высоты и длины штабеля (фиг. 10). Измеренные таким способом значения ширины, высоты и длины штабеля принимаются для вычисления объёма круглых лесоматериалов по методу полного ящика.
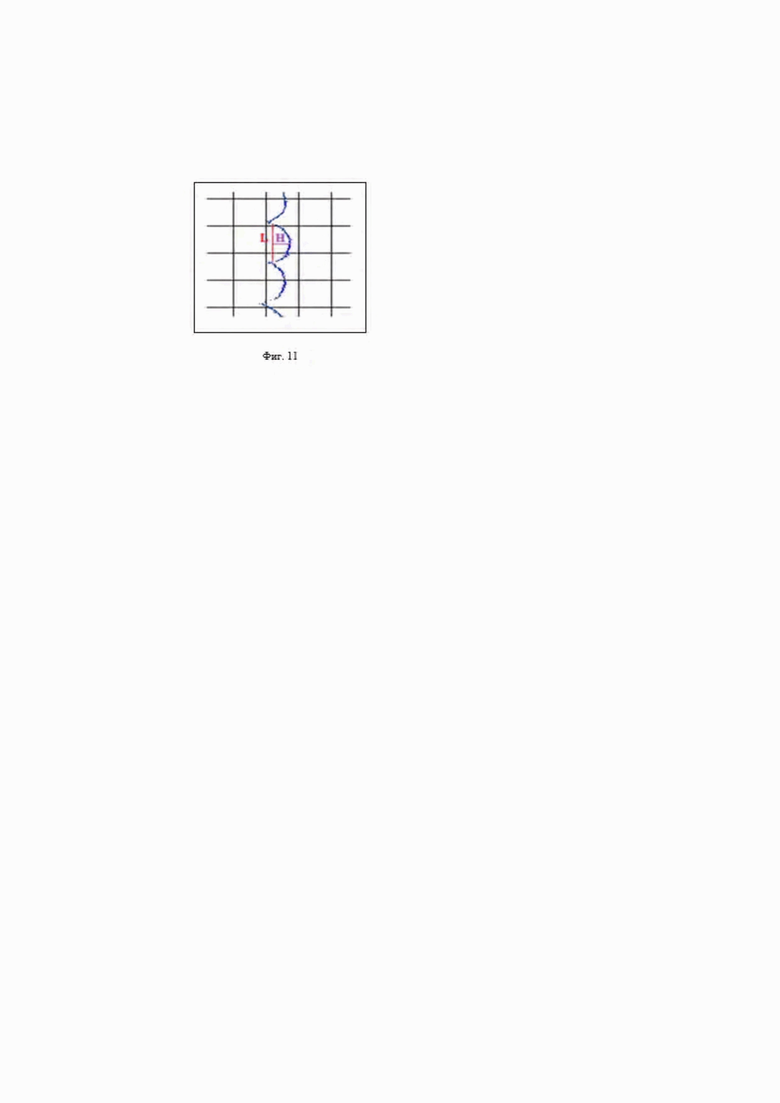
При укладке бревен в штабели (труб, столбов и др., на транспортном средстве), измерительные модули могут получать только точки на части окружности бревна, в этом случае, применяем метод вычисления диаметра по хорде или площади круга (фиг. 11).
Вычисляем диаметр, измерив хорду и высоту сегмента, по формуле:
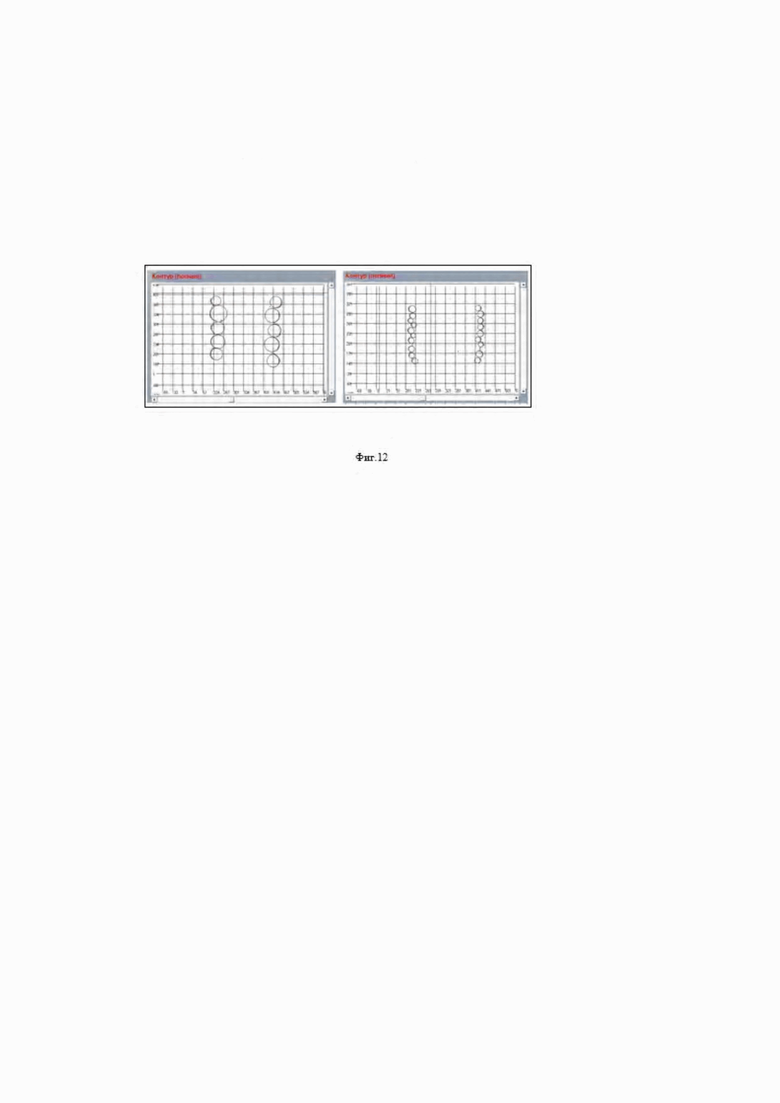
Примеры вписывания окружностей по вычисленным диаметрам представлены на рис. 4Е.
Вычисление диаметров осуществляется по площади круга, откалиброванными регистрирующими модулями, передающими видеоизображение груза в обрабатывающий модуль, по формуле:
(фиг. 13)
В обрабатывающем модуле имеются возможности сохранения всей информации об измеренном грузе.
Примеры фиксации измерений, фото характеристик груза и других признаков приведены на фиг. 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИЕМА ОРТОГОНАЛЬНЫХ ЛИНЕЙНО ПОЛЯРИЗОВАННЫХ ВОЛН | 2016 |
|
RU2620893C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ БЛОК УПРАВЛЕНИЯ ГОРОЧНЫМ СТРЕЛОЧНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2368525C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧЕРЕПА | 2011 |
|
RU2456915C1 |
| ОДНОСЛОЙНЫЙ ВЫСОКОЭФФЕКТИВНЫЙ КАТАЛИЗАТОР ДЛЯ ОЧИСТКИ ОТРАБОТАВШИХ ГАЗОВ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И СПОСОБ ЕГО ПРИГОТОВЛЕНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2279311C2 |
| Способ определения объема сыпучих грузов в движущемся транспортном средстве с использованием бесконтактного измерения | 2021 |
|
RU2772138C1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ КРИВИЗНЫ ПОВЕРХНОСТИ СТРОИТЕЛЬНОЙ КОНСТРУКЦИИ | 2014 |
|
RU2559168C1 |
| Способ определения фактического состояния канала ствола артиллерийских орудий и устройство для его реализации | 2023 |
|
RU2828997C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАПОМИНАЕМОСТИ МУЛЬТИМЕДИЙНОГО СООБЩЕНИЯ | 2018 |
|
RU2708197C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
| КОМПЛЕКС КОНТРОЛЯ БОРТОВЫХ КАБЕЛЬНЫХ СЕТЕЙ | 2009 |
|
RU2436108C2 |





Изобретение относится к средствам определения объема грузов лесоматериала на транспортных средствах. Устройство включает пять фотометрических сканеров (СК1-СК5), расположенных в на металлической раме и выполненных с возможностью автоматической корректировки углов разворота, регистрирующие модули - К1, К2, К3, представляющие собой телевизионные фотокамеры, размещенные на раме, регистрирующие модули КТ1, КТ2, которые находятся вне рамы крепления регистрирующих модулей и расположенные под углом 45 градусов к оси движения груза, модуль измерения расстояния и синхронизации (СК-6), расположенный в конце площадки. При этом каждый из модулей имеет внутренний обогрев, устройство также содержит датчик измерения температуры окружающей среды (ОС) и датчики измерения температуры внутри модулей для управления системой включения обогрева модулей, при достижении предела минусовой температуры ОС и включения принудительной вентиляции модулей, при достижении предела плюсовой температуры. Устройство включает обрабатывающую часть, обеспечивающую получение данных, измерение ширины и высоты груза, площади торцевых частей, диаметра груза, вычисление с использованием измеренных данных объема груза сложной формы, и управление работой модулей измерительной части установки. Достигается реализация функции измерения объема перевозимых грузов на автотранспорте и железной дороге без остановки и разгрузки. 3 з.п. ф-лы, 14 ил.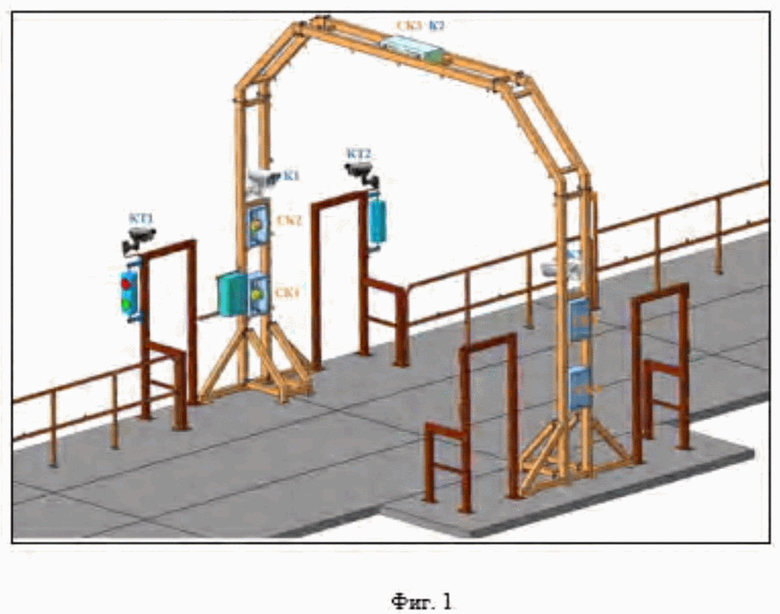
1. Устройство для бесконтактного измерения объема движущегося груза, имеющего сложную геометрическую форму, характеризующееся тем, что содержит измерительную часть и обрабатывающую часть, причем измерительная часть представляет собой площадку с металлоконструкциями и расположенными на ней измерительным и регистрирующим оборудованием, а именно
- фотометрические сканеры в количестве 5 штук (СК1-СК5), причем, СК1 и СК2 расположены вертикально, на боковой рамке металлоконструкции, СК4 и СК5 расположены вертикально, на боковой рамке металлоконструкции противоположно СК1 и СК2, а СК3 расположен горизонтально на верхней части металлоконструкции, причем СК1-СК5 имеют различные углы разворота:
СК1, СК5 – угол разворота лежит в пределах от -30° до +30° для получения точек, лежащих на границе конструкции ТС и нижней части груза,
СК2, СК3, СК4 – угол разворота лежит в пределах от -60° до +60° для получения точек, лежащих на поверхностях боковых и верхних частей груза, причем сканеры устанавливают таким образом, чтобы обеспечивалась единая 2D плоскость сканирования груза и обеспечивалось получение максимального количество точек на поверхности груза;
- регистрирующие модули - К1, К2, К3, представляющие собой телевизионные фотокамеры, размещаются по кругу на конструкции в определенном порядке:
К1 располагается на боковой рамке металлоконструкции,
К3 располагается на боковой рамке металлоконструкции противоположно К1,
К2 располагается на верхней части металлоконструкции,
для получения максимальной фото и/или видео информации с поверхности груза, причем К1, К2, К3 откалиброваны так, что они создают панорамный снимок груза при движении;
- регистрирующие модули КТ1, КТ2, которые находятся вне рамки металлоконструкции и расположены под углом 45 градусов к оси движения груза таким образом, чтобы получать снимки передней и задней торцевой части груза, причем КТ1 и КТ2 откалиброваны в плоскости сканирования таким образом, чтобы вычислить площадь торцевой поверхности груза, а также площади отдельных его частей в движении;
- модуль измерения расстояния и синхронизации (СК-6), расположенный в конце площадки, позволяет измерять расстояние до груза в каждый момент времени с частотой обновления не менее 50 Гц;
при этом каждый из модулей имеет внутренний обогрев или помещается в термобоксах, причем устройство также содержит датчик измерения температуры окружающей среды (ОС) и датчики измерения температуры, внутри модулей (ВМ), для управления системой включения обогрева модулей, при достижении предела минусовой температуры ОС и включения принудительной вентиляции модулей, при достижении предела плюсовой температуры ВМ, а обрабатывающая часть состоит из одного или нескольких компьютерных системных блоков, с помощью которых обеспечивается получение данных для измерения ширины и высоты груза, площади торцовых частей, диаметра груза и вычисления с использованием измеренных данных объема груза сложной формы, а также для управления работой всех модулей, расположенных в измерительной части установки.
2. Устройство по п. 1, характеризующееся тем, что дополнительно содержит систему сбора данных, которая оснащена модулем получения данных с устройств весового контроля ТС с грузом, для последующего вычисления плотности груза.
3. Устройство по п. 1, характеризующееся тем, что полученные обрабатывающей частью данные содержат одно или несколько из: координаты точек, фото- и видеоинформация при проведении измерений от модулей, расположенных в измерительной части установки.
4. Устройство по п. 1, характеризующееся тем, что дополнительно содержит модуль управления движением транспортным потоком.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| KR 20170066336 A, 14.06.2017 | |||
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОБЪЕМА ШТАБЕЛЯ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ, РАСПОЛОЖЕННЫХ НА АВТОМОБИЛЕ | 2012 |
|
RU2492477C1 |
| RU 99109434 A, 10.02.2001 | |||
| AUTOMATIC SYSTEM VOLUME AND BIOMETRIC MEASUREMENT OF LOADS IN MOVING TRUCKS "LOGMETER", найдено в | |||

