ОБЛАСТЬ ТЕХНИКИ.
Группа изобретений относится к оборудованию для швартовки или перестановки судов, и может быть использована автономными буксирами-автоматами для осуществления швартовых операций морских транспортных средств (грузовых судов), в том числе, и для обеспечения эскорта или раскантовки.
УРОВЕНЬ ТЕХНИКИ.
Известны автоматические электромагнитные швартовые устройства и автоматические вакуумные швартовые устройства, применяемые на судне в операциях швартовки с причалом, размещаются на нем.
Существующие АШУ могут быть применены для осуществления необходимых морских маневров буксиром-автоматом, но при этом имеется ряд сложностей. В случае с применением вакуумного швартовного устройство это:
- Высокая степень сложности исполнения АШУ.
- Частый сервис.
- Общие большие габариты АШУ.
- Ограниченная сила притяжения на единицу поверхности и пониженная точность базирования из-за эластичных присосок.
- Долгий период осуществления присасывания.
- Короткий период эксплуатация некоторых узлов. В случае применения ЭМШУ, то:
- Отсутствие возможности выполнения операций с неметаллическими судами.
- Нагрев катушки.
- Влияние магнитного поля на составляющие судна.
Таким образом, внедрение механического швартовного устройства является актуальной технологией при развитии автономного судовождения.
ИЗВЕСТНЫ ШВАРТОВНЫЕ УСТРОЙСТВА ПО ПАТЕНТНЫМ ДОКУМЕНТАМ.
RU 40286 «ЭЛЕКТРОМАГНИТНОЕ ШВАРТОВНОЕ УСТРОЙСТВО».
Использование: судостроение, а именно вспомогательное оборудование по швартовке транспортных средств с электротягой, в частности судов. Технический результат: автоматическое подключение к береговой сети, возможность пуска от нее гребных двигателей и подзарядки аккумуляторной батареи. Сущность: электромагнитная система в виде трансформатора, сердечник которого состоит из двух частей, несущих первичную и вторичную обмотки, заключенных в отдельные корпуса, один из которых с первичной обмоткой закреплен с помощью амортизаторов на колонке причала, а другой прикреплен к станине, установленной на носовой или кормовой оконечности судна, посредством телескопической штанги со сферическими шарнирами на концах, с осевым пружинным амортизатором и радиальными пружинами, связывающими ее со станиной. Первичная обмотка подключена к береговой электросети, а вторичная - к судовой.
RU 40286 U1 «ЭЛЕКТРОМАГНИТНОЕ ШВАРТОВНОЕ УСТРОЙСТВО».
Использование: судостроение, а именно вспомогательное оборудование по швартовке транспортных средств с электротягой, в частности судов.
Технический результат: автоматическое подключение к береговой сети, возможность пуска от нее гребных двигателей и подзарядки аккумуляторной батареи. Сущность: электромагнитная система в виде трансформатора, сердечник которого состоит из двух частей, несущих первичную и вторичную обмотки, заключенных в отдельные корпуса, один из которых с первичной обмоткой закреплен с помощью амортизаторов на колонке причала, а другой прикреплен к станине, установленной на носовой или кормовой оконечности судна, посредством телескопической штанги со сферическими шарнирами на концах, с осевым пружинным амортизатором и радиальными пружинами, связывающими ее со станиной. Первичная обмотка подключена к береговой электросети, а вторичная - к судовой.
CN 108674582 - «АВТОМАТИЧЕСКОЕ МАГНИТНОЕ ШВАРТОВНОЕ УСТРОЙСТВО».
Изобретение предусматривает автоматическое магнитное швартовое устройство и относится к технической области судостроительного оборудования. Автоматическое магнитное швартовое устройство используется для причала судна на причале или причала между водными судами. Автоматическое магнитное швартовное устройство включает в себя основание, блок управления, механический рычаг, гидравлический цилиндр, сферическое соединение, электромагнитную присоску, датчик смещения и датчик трехосных сил. В процессе причаливания судна датчик водоизмещения определяет положение и автоматически управляет каждым гидравлическим цилиндром после расчета блока управления, так что механический рычаг и электромагнитная присоска управляются для выполнения поглощения вибрации и швартовки на судне; в процессе швартовки измеряются поперечная сила, продольная сила и вертикальная сила судна; а блок управления управляет гидравлическим цилиндром для регулировки положения механического рычага таким образом, чтобы препятствовать амплитуде движения и скорости судна. Два швартовых устройства образуют одну группу; одна группа швартовых устройств расположена на носу и корме корабля; количество групп швартовых устройств может быть увеличено для судна с большим водоизмещением; и реализован автоматический швартовка. Автоматическое магнитное швартовое устройство имеет те преимущества, что устройство простое, пространство экономится, скорость швартовки высока, эффективность высока, судоходное управление эффективно тормозится, предотвращается столкновение между судном и причалом и повышается безопасность.
RU 213391 - «ЭЛЕКТРОМАГНИТНОЕ ШВАРТОВНОЕ УСТРОЙСТВО».
Полезная модель относится к области судостроения, а именно к техническим средствам судостроения, обеспечивающим швартовные операции в портах, в частности, предназначенным для надежного захвата магнитным устройством стенки буксируемого судна без участия палубной швартовной команды в аварийных ситуациях в особо опасных условиях. Техническим результатом является повышение надежности швартовки в экстренных ситуациях швартовных операций в автоматическом или автоматизированном режиме, без участия палубной швартовной команды. Сущность полезной модели заключается в том, что электромагнитное швартовное устройство, предназначенное для установки на буксир, содержит корпус, на одной из сторон которого установлены отдельные электромагниты, а на другой его стороне - крепежный узел приводного троса. Согласно полезной модели, оно снабжено кабелем и центрирующим кольцом, предназначенным для посадки в кольцевое седло буксира. Корпус выполнен дискообразной формы с металлическим посадочным чехлом сферической формы и гидроизолирующей головкой из податливого материала, в корпусе которого герметично размещены крепежный узел с возможностью пропуска через него приводного троса и кабеля, посадочный чехол, выполненный из податливого материала. Внутри чехла расположена распределительная коробка, коммутирующая отдельные электромагниты с кабелем.
RU 214043 - «ВАКУУМНОЕ ШВАРТОВНОЕ УСТРОЙСТВО».
Полезная модель относится к области судостроения, а именно к техническим средствам судостроения, обеспечивающим швартовные операции в портах, в частности, предназначенным для надежного захвата вакуумным устройством стенки буксируемых немагнитных судов и из композитных и неметаллических материалов и других плавающих предметов (понтоны, бочки, контейнеры и т.п.) без участия палубной швартовной команды в аварийных ситуациях в особо опасных условиях. Технический результат заключается в повышении надежности швартовки в экстренных ситуациях швартовных операций с судами и плавсредствами из немагнитных материалов в автоматическом или автоматизированном режиме, без участия палубной швартовной команды. Сущность полезной модели заключается в том, что вакуумное швартовное устройство, предназначенное для установки на буксир, содержит корпус, на одной из сторон которого установлены отдельные вакуумные присоски, а на другой его стороне - крепежный узел приводного троса с вакуумным шлангом. Согласно полезной модели, устройство снабжено блоком пневматической коммутации с электрическим кабелем управления, а также снабжено центрирующим кольцом, предназначенным для посадки устройства в кольцевое седло буксира. Корпус выполнен дискообразной формы, с которым связаны отдельные корпусы вакуумных присосок, и снабжен металлическим посадочным чехлом сферической формы с гидроизолирующей головкой из податливого материала, в котором герметично размещены блок пневматической коммутации, коммутирующий вакуумные полости отдельных присосок при помощи шлангов-соединителей, а также крепежный узел с возможностью пропуска через него приводного троса, вакуумного шланга и кабеля блока коммутации. В каждом корпусе присосок установлен датчик разрежения, связанный с блоком пневматической коммутации.
RU 215135 - «ПОВОРОТНЫЙ БУКСИРНЫЙ ШВАРТОВНЫЙ МЕХАНИЗМ».
Полезная модель относится к оборудованию для швартовки или перестановки судов и может быть использована автономными буксирами-автоматами для осуществления швартовых операций морских транспортных средств (грузовых судов).
Технической задачей, на которую направлена предлагаемая полезная модель, является обеспечение безопасного и быстрого выполнения морских маневров (эскорта, раскантовки, швартовки-отшвартовки) при реализации безэкипажного метода осуществления морских маневров, не требующего участия людей непосредственно на борту судов.
Технический результат заключается в том, что предлагаемая конструкция механизма для судовой швартовки учитывает разные типы качек, компенсируя качку при выполнении жесткой сцепки, сохраняя высокую степень надежности при распределении нагрузки и не допуская высокого концентрирования напряжения в металлоконструкции.
Технический результат достигается благодаря взаимосвязи узлов конструкции вертикальных и горизонтальных гидравлических узлов с использованием шарнирных и пружинных соединений.
Известны автоматические электромагнитные швартовые устройства и автоматические вакуумные швартовые устройства, применяемые на судне в операциях швартовки с причалом, размещаются на нем.
Существующие АШУ могу быть применены для осуществления необходимых морских маневров буксиром-автоматом, но при этом имеется ряд сложностей. В случае с применением вакуумного швартовного устройство это:
- Высокая степень сложности исполнения АШУ.
- Частый сервис.
- Общие большие габариты АШУ.
- Ограниченная сила притяжения на единицу поверхности и пониженная точность базирования из-за эластичных присосок.
- Долгий период осуществления присасывания.
- Короткий период эксплуатация некоторых узлов. В случае применения ЭМШУ, то:
- Отсутствие возможности выполнения операций с неметаллическими судами.
- Нагрев катушки.
Таким образом, внедрение механического швартовного устройства является актуальной технологией при развитии автономного судовождения.
ТЕХНИЧЕСКАЯ ЗАДАЧА
Технической задачей, на которую направлена предлагаемая группа изобретений, является обеспечение безопасного и быстрого выполнения морских маневров (эскорта, раскантовки, швартовки-отшвартовки) при реализации безэкипажного метода осуществления морских маневров, не требующего участия людей непосредственно на борту судов.
1. Техническая задача достигается тем, что предложен швартовный захватный модуль, включающий осуществляющие жесткую сцепку захватное устройство, характеризующееся возможностью установки на подвижном швартовном устройстве, размещенном на судне-буксире, и приемный блок, характеризующийся возможностью установки на корпусе эскортируемого судна, при этом, захватное устройство содержит цилиндрический корпус малой высоты с углублениями для размещения передаточных систем для передачи вращения Г-образных захватов расположенных крестообразно, корпус закрыт круглой крышкой с отверстиями для исполнительных органов, приводящих через передаточные звенья Г-образные захваты в наклоны на 90 градусов из изначального положения для захвата и разжатия в обратную сторону в изначальное положение, в центре корпуса размещается конусная деталь, которая выполняет роль направляющей для захватного устройства в приемный блок, который имеет соответствующее отверстие для конуса захватного устройства и утолщения, для зацепа Г-образных захватов при захвате, который срабатывает при единовременном срабатывании датчиков при касании захватного устройства с приемным блоком для дальнейшей фиксации, который располагается в углублении корпуса эскортируемого судна.
2. Техническая задача в варианте изобретения достигается тем, что предложен швартовный захватный модуль, включающий осуществляющие жесткую сцепку захватное устройство, характеризующееся возможностью установки на подвижном швартовном устройстве, размещенном на судне-буксире, и приемный блок, характеризующийся возможностью установки на корпусе эскортируемого судна, при этом, захватное устройство содержит корпус в виде куба малой высоты с углублениями для размещения передаточных систем для передачи вращения Г-образных захватов, расположенных попарно в верхней и нижних плоскостях корпуса, соединенных между собой перемычкой для синхронного движения, корпус закрыт квадратной крышкой с отверстиями для исполнительных органов, приводящих через передаточные звенья Г-образные захваты в наклоны на 90 градусов из изначального положения для захвата и разжатия в обратную сторону в изначальное положение, в центре корпуса размещается деталь с треугольным профилем в сечении со скругленными краями, которая выполняет роль направляющей для захватного устройства в приемный блок, который имеет соответствующее отверстие для детали с треугольным сечением захватного устройства и утолщения, для зацепа Г-образных захватов при захвате, который срабатывает при единовременном срабатывании датчиков при касании захватного устройства с приемным блоком для дальнейшей фиксации, который располагается в углублении корпуса эскортируемого судна.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
Технический результат группы изобретений заключается в том, что в предлагаемом швартовном модуле (варианты) реализован механический принцип для жесткой сцепки, что является альтернативой магнитным и вакуумным швартовным узлам. Достижение технического результата не требует постоянного источника энергии, при этом предлагаемое механическое решение обладает высокими показателями надежности при сцепке и не требует частого обслуживания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Сущность изобретения заключается в том, что предложен захватный швартовный модуль, состоящий из двух блоков, один из которых - захватный блок, устанавливается на подвижном швартовном устройстве судна-буксира, а другой - приемный блок, крепится на корпусе эскортируемого судна. Блоки имеют возможность находиться как в жесткой связи, так и порознь, каждый на корпусе своего судна - эскортируемого или буксира. Точное взаимодействие и жесткую сцепку блоков обеспечивают конусная деталь, конусное отверстие и Г-образные захваты.
Размещение основных блоков модуля соответственно на корпусе эскортируемого судна и судне-буксире потенциально не наносит вреда ни корпусу, ни оборудованию.
В варианте исполнения по 2 формулы изобретения корпус выполнен в виде куба, что позволяет варьировать расположением Г-образных захватов.
Сущность изобретения поясняется графическими материалами, на которых дано:
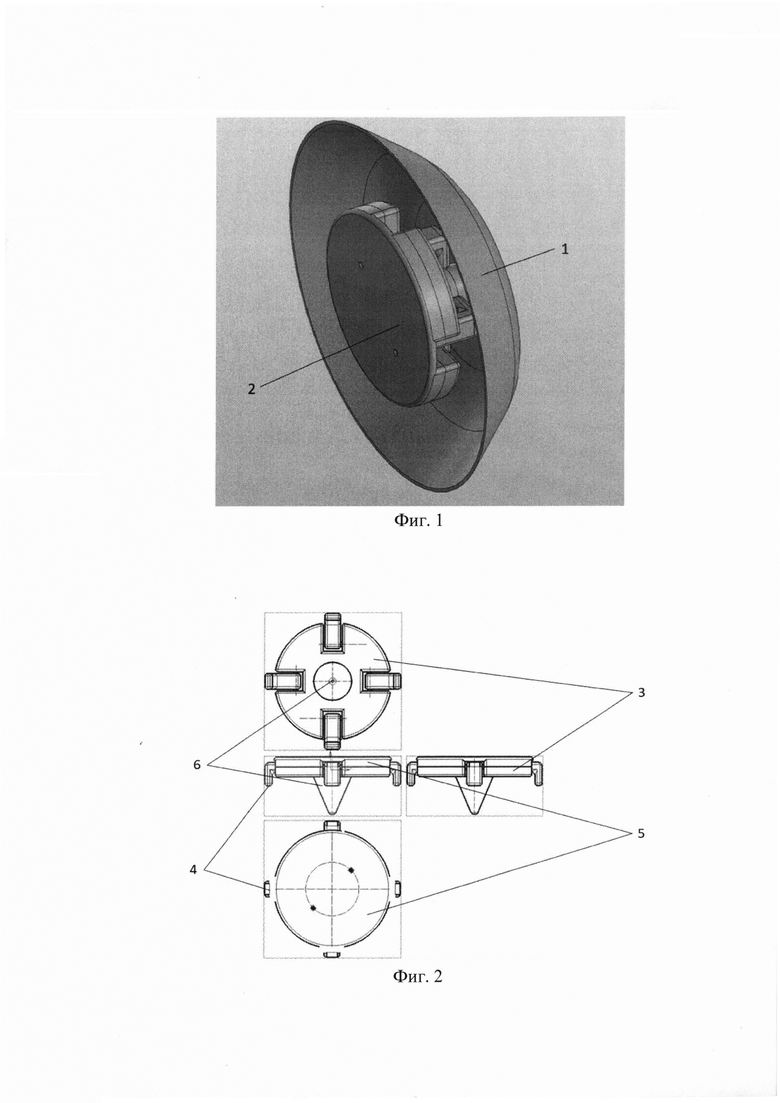
на фиг. 1 - Швартовный захватный модуль (варианты) по п. 1 формулы изобретении общий вид;
на фиг. 2 - Швартовный захватный модуль (варианты) по п. 1 формулы изобретения чертеж;
На рисунках указаны:
1 - Захватный блок
2 - Приемный блок
3 - Корпус
4 - Захваты
5 - Крышка
6 - Направляющая деталь
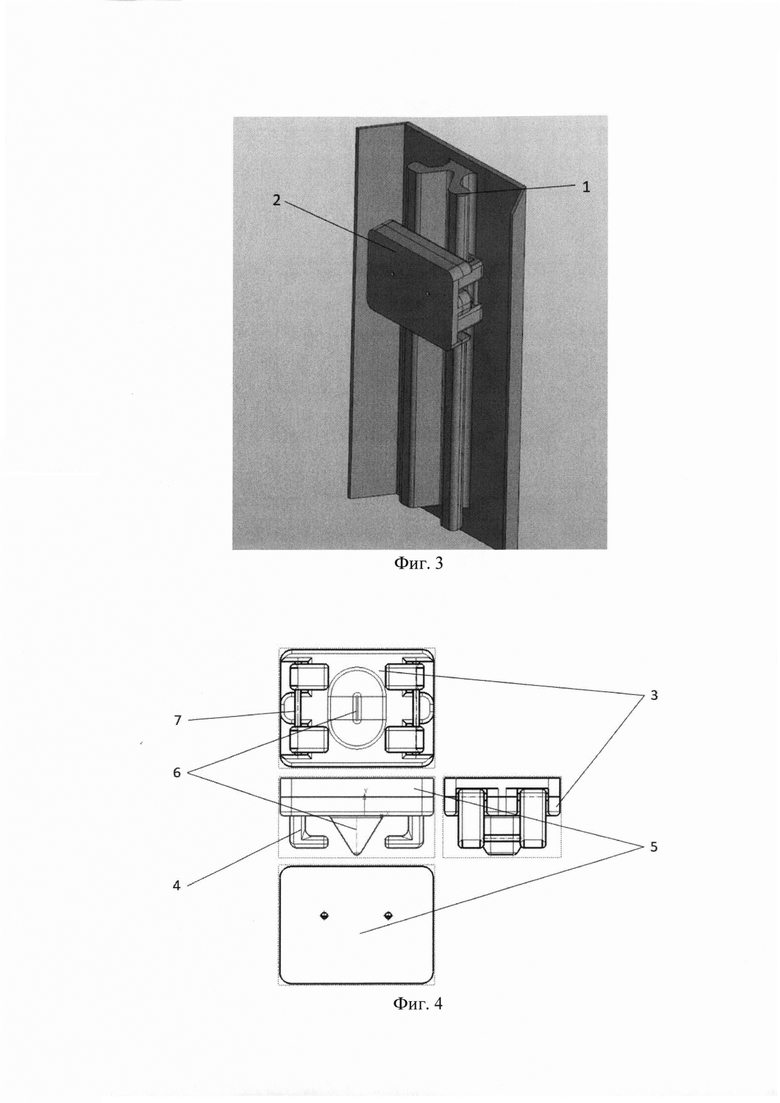
на фиг. 3 - Швартовный захватный модуль (варианты) по п. 2 формулы изобретения общий вид;
на фиг. 4 - Швартовный захватный модуль (варианты) по п. 2 формулы изобретения чертеж;
На рисунках указаны:
1 - Захватный блок
2 - Приемный блок
3 - Корпус
4 - Захваты
5 - Крышка
6 - Направляющая деталь
7 - Перемычка
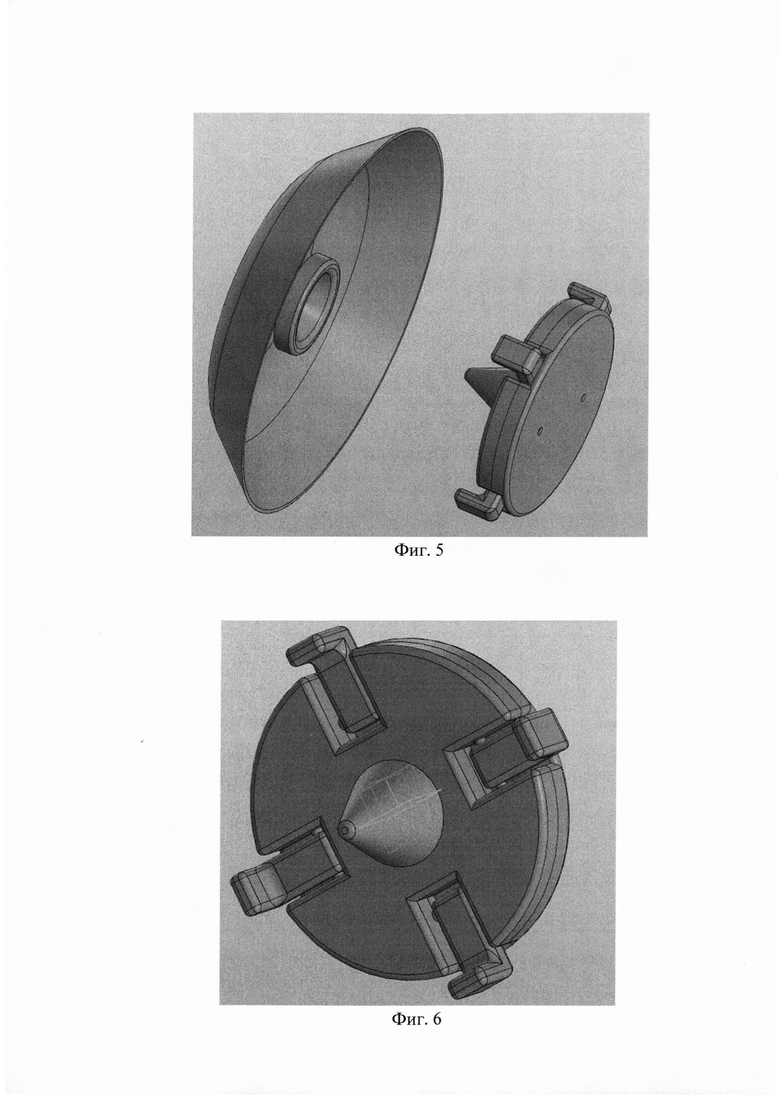
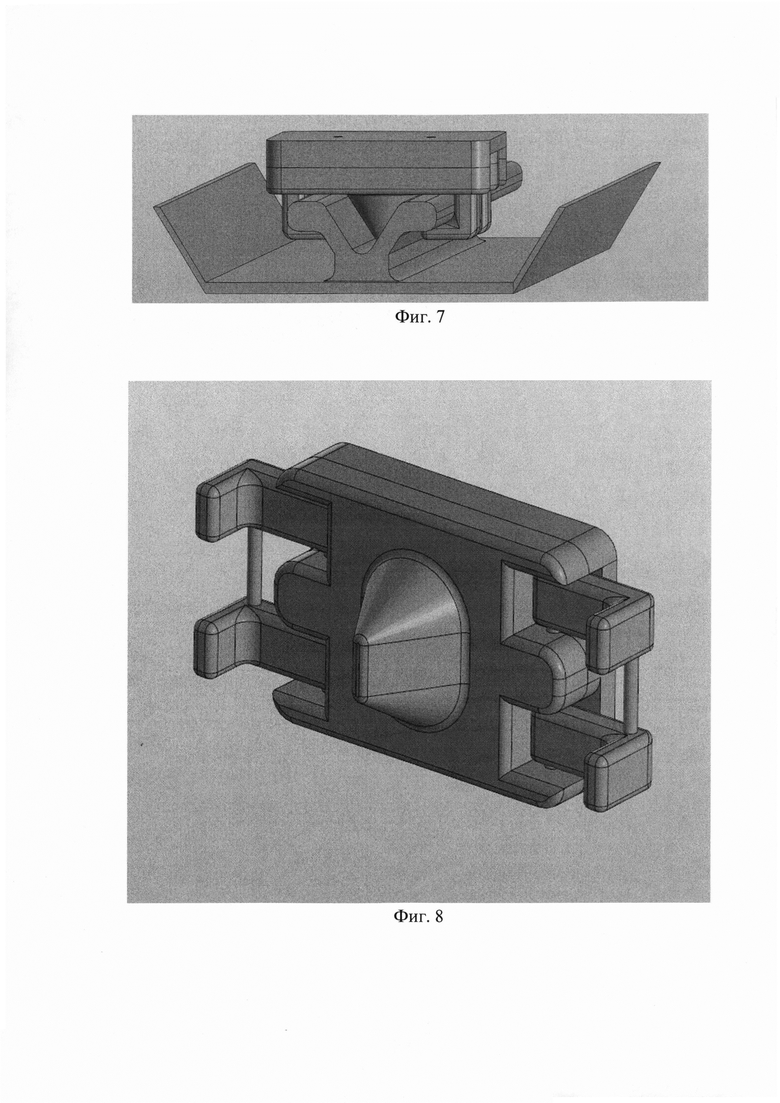
В Приложении на рисунках фиг. 5, 6, 7, 8 представлены разные графические виды вариантов для демонстрации разницы зацепления с сохранением принципа работы, с целью индивидуального подбора для обеспечения швартовных операций с учетом габаритов судов, типов судов, условий при которых будут выполняться морские маневры.
Швартовный захватный модуль, включающий осуществляющие жесткую сцепку захватный блок 1, характеризующееся возможностью установки на подвижном швартовном устройстве, размещенном на судне-буксире, и приемный блок 2, характеризующийся возможностью установки на корпусе эскортируемого судна. Захватный блок 1 содержит цилиндрический корпус малой высоты 3 с углублениями для размещения передаточных систем для передачи вращения Г-образных захватов 4 расположенных крестообразно, корпус закрыт круглой крышкой 5 закрывающей исполнительные органы, приводящих через передаточные звенья Г-образные захваты 4 в наклоны на 90 градусов из изначального положения для захвата и разжатия в обратную сторону в изначальное положение. В центре корпуса 3 размещается конусная направляющая деталь 6, которая выполняет роль направляющей для захватного устройства в приемный блок 2, который имеет соответствующее отверстие для конуса 6 захватного блока 1 и утолщения, для зацепа Г-образных захватов 4 при захвате, который срабатывает при единовременном срабатывании датчиков при касании захватного блока 1 с приемным блоком 2 для дальнейшей фиксации, который располагается в углублении корпуса эскортируемого судна.
Вариант исполнения швартовного захватного модуля, включает осуществляющие жесткую сцепку захватный блок 1, характеризующееся возможностью установки на подвижном швартовном устройстве, размещенном на судне-буксире, и приемный блок 2, характеризующийся возможностью установки на корпусе эскортируемого судна. Захватный блок содержит корпус в виде куба малой высоты 3 с углублениями для размещения передаточных систем для передачи вращения Г-образных захватов 4, расположенных попарно в верхней и нижних плоскостях корпуса 3, соединенных между собой перемычкой 7 для синхронного движения, корпус закрыт квадратной крышкой 6, закрывающей исполнительные органы, приводящих через передаточные звенья Г-образные захваты 3 в наклоны на 90 градусов из изначального положения для захвата и разжатия в обратную сторону в изначальное положение, в центре корпуса 3 размещается направляющая деталь с треугольным профилем 6 в сечении со скругленными краями, которая выполняет роль направляющей для захватного блока 1 в приемный блок 2, который имеет соответствующее отверстие для детали с треугольным сечением захватного устройства и утолщениями, для зацепа Г-образных захватов при захвате, который срабатывает при единовременном срабатывании датчиков при касании захватного устройства с приемным блоком 2 для дальнейшей фиксации, который располагается в углублении корпуса эскортируемого судна.
Захваты 3 выполнены описанной формой для обеспечения надежного захвата с приемным блоком 2.
На рисунках фиг. 5, 6, 7, 8 представлены разные графические виды вариантов для демонстрации разницы зацепления с сохранением принципа работы, с целью индивидуального подбора для обеспечения швартовных операций с учетом габаритов судов, типов судов, условий при которых будут выполняться морские маневры.
Крепление захватного блока 1 к подвижному швартовному устройству судна-буксира осуществляется любым известным доступным способом.
Крепление приемного блока 2 к корпусу судна осуществляется любым известным доступным способом.
РАБОТА УСТРОЙСТВА
Швартовный захватный модуль работает следующим образом. При подходе буксира-автомата с помощью подвижной швартовной конструкции направляется захватный механический блок 1 в приемный блок 2, размещенный на грузовом или ином другом судне. При подходе, с помощью направляющих деталей механических захватный блок 1 фиксируется и с помощью контактных датчиков дает соответствующий сигнал и осуществляется сжатие Г-образными захватами для зацепления с приемным блоком. Посредством обратной связи осуществляется размыкание, как дистанционно, так и автономно, в зависимости от уровня автономности буксира-автомата.
НАДЕЖНОСТЬ УСТРОЙСТВА.
Надежность устройства была подтверждена экспериментами.
С целью обоснования жесткости конструкции, был произведен эксперимент, описывающий состояние и поведение узлов при разных нагрузках на статику и устойчивость.
Проведенный эксперимент выявил ожидаемую концентрацию напряжения исполнительных органах, а также валах. Статический анализ подтвердил необходимость специальной швартовной конструкции, на которой будет размещен захватный блок. Спектральная карта эксперимента указывает на оптимальный вариант конструкции захватного и приемного блоков.
При выполнении эскорта, раскантовки и прочих морских операций с помощью буксира-автомата механический захватный модуль выполняет роль промежуточного узла связи между буксиром-автоматом и судном, поэтому при выполнении морских маневров необходима подвижная швартовная конструкция, которая будет оптимально распределять нагрузку при выполнении операций и обеспечивать безопасное маневрирование буксира-автомата совместно с судном.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕРЕГОВОЙ ШВАРТОВНЫЙ КОМПЛЕКС, БЕРЕГОВОЙ ОПОРНЫЙ ШВАРТОВНЫЙ МОДУЛЬ (ВАРИАНТЫ), УНИВЕРСАЛЬНАЯ МАГНИТНАЯ ЗАХВАТНАЯ СЕКЦИЯ (ВАРИАНТЫ), МАГНИТНАЯ ЯЧЕЙКА | 2024 |
|
RU2834110C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ТЕКУЧЕЙ СРЕДЫ К ПЛАВАЮЩЕМУ СУДНУ | 2013 |
|
RU2538739C1 |
| Способ швартовки судна и автоматизированное швартовое устройство | 2020 |
|
RU2757696C1 |
| СУДОВОЕ ШВАРТОВНОЕ УСТРОЙСТВО | 1990 |
|
RU2013287C1 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| СИСТЕМА ШВАРТОВКИ СУДНА | 1993 |
|
RU2146633C1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |
| СИСТЕМА ДЛЯ ШВАРТОВКИ СУДНА В МОРЕ | 2006 |
|
RU2422318C2 |
| СПОСОБ ШВАРТОВКИ СУДНА С ПОМОЩЬЮ ЛАЗЕРНОЙ СИСТЕМЫ | 2015 |
|
RU2613465C1 |
Группа изобретений относится к оборудованию для швартовки или перестановки судов, и может быть использована автономными буксирами-автоматами для осуществления швартовых операций морских транспортных средств. В предлагаемом швартовном модуле (варианты) реализован механический принцип для жесткой сцепки, что является альтернативой магнитным и вакуумным швартовным узлам. Захватный швартовный модуль, состоящий из двух блоков, один из которых - захватный блок, устанавливается на подвижном швартовном устройстве судна-буксира, а другой - приемный блок, крепится на корпусе эскортируемого судна. Точное взаимодействие и жесткую сцепку блоков обеспечивают конусная деталь, конусное отверстие и Г-образные захваты. Во втором варианте исполнения устройства корпус выполнен в виде куба, что позволяет варьировать расположением Г-образных захватов. Достигается обеспечение безопасного и быстрого выполнения морских маневров при реализации безэкипажного метода осуществления морских маневров, не требующего участия людей непосредственно на борту судов. 2 н.п. ф-лы, 8 ил.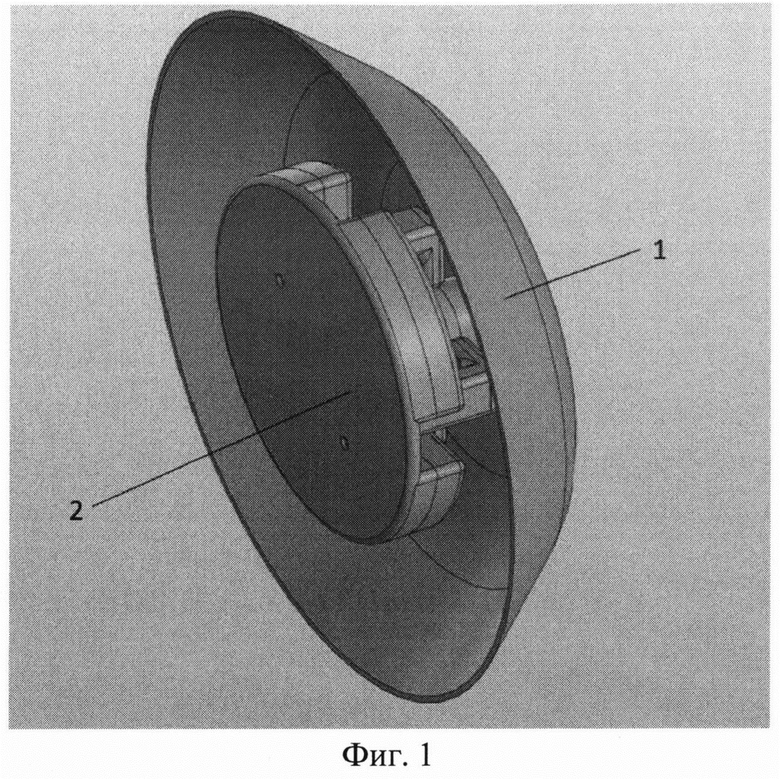
1. Швартовный захватный модуль, включающий осуществляющие жесткую сцепку захватное устройство, характеризующееся возможностью установки на подвижном швартовном устройстве, размещенном на судне-буксире, и приемный блок, характеризующийся возможностью установки на корпусе эскортируемого судна, при этом, захватное устройство содержит цилиндрический корпус малой высоты с углублениями для размещения передаточных систем для передачи вращения Г-образных захватов, расположенных крестообразно, корпус закрыт круглой крышкой с отверстиями для исполнительных органов, приводящих через передаточные звенья Г-образные захваты в наклоны на 90 градусов из изначального положения для захвата и разжатия в обратную сторону в изначальное положение, в центре корпуса размещается конусная деталь, которая выполняет роль направляющей для захватного устройства в приемный блок, который имеет соответствующее отверстие для конуса захватного устройства и утолщения, для зацепа Г-образных захватов при захвате, который срабатывает при единовременном срабатывании датчиков при касании захватного устройства с приемным блоком для дальнейшей фиксации, который располагается в углублении корпуса эскортируемого судна.
2. Швартовный захватный модуль, включающий осуществляющие жесткую сцепку захватное устройство, характеризующееся возможностью установки на подвижном швартовном устройстве, размещенном на судне-буксире, и приемный блок, характеризующийся возможностью установки на корпусе эскортируемого судна, при этом, захватное устройство содержит корпус в виде куба малой высоты с углублениями для размещения передаточных систем для передачи вращения Г-образных захватов, расположенных попарно в верхней и нижней плоскостях корпуса, соединенных между собой перемычкой для синхронного движения, корпус закрыт квадратной крышкой с отверстиями для исполнительных органов, приводящих через передаточные звенья Г-образные захваты в наклоны на 90 градусов из изначального положения для захвата и разжатия в обратную сторону в изначальное положение, в центре корпуса размещается деталь с треугольным профилем в сечении со скругленными краями, которая выполняет роль направляющей для захватного устройства в приемный блок, который имеет соответствующее отверстие для детали с треугольным сечением захватного устройства и утолщения, для зацепа Г-образных захватов при захвате, который срабатывает при единовременном срабатывании датчиков при касании захватного устройства с приемным блоком для дальнейшей фиксации, который располагается в углублении корпуса эскортируемого судна.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ЗАГРЯЗНЕНИЯ ЖИДКОСТЕЙ, СОДЕРЖАЩИХСЯ В ПРОЗРАЧНЫХ СОСУДАХ | 1966 |
|
SU215135A1 |
| CN 108674582 A, 19.10.2018 | |||
| CN 102464213 A, 23.05.2012 | |||
| CN 104260830 A, 07.01.2015 | |||
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |

