Способ относится к области использования технических средств судовождения, а именно средств обеспечения безопасности маневрирования при подходе к причалу и швартовки судна.
Анализ ежегодных статистических данных Регистра Ллойда аварийности мирового морского флота показывает, что количество аварий, связанных с навалами на пирс, из общего числа аварий достигает 13% и устойчиво занимает 3-4 место. При этом довольно часто навалы приводят даже к гибели судов [http://www.transpostand.ru/rantas-10-1.html].
Самый общеизвестный и широко распространенный способ швартовки судна состоит в следующем. Аврал объявляют заранее с таким расчетом, чтобы закончить подготовительные работы до времени подхода к причалу. Во время подхода к причалу непосредственно, командиры носовой и кормовой швартовной команды докладывают на мостик через каждый метр расстояние до причала, определяемое визуально, то есть приближенно, поскольку никакими средствами для измерения малых дистанций до объектов суда не оборудуются. Отсутствие достаточно точных измерителей расстояния до причала во время швартовки судна является существенным недостатком известного способа.
К второму недостатку известного способа относится невозможность измерения скорости подходящего судна относительно причала. При этом скорость подхода к причалу капитан или лоцман определяют либо по частоте докладов командиров швартовных партий, либо по собственным визуальным наблюдениям, то есть также приближенно. Использование относительного лага в качестве измерителя скорости технически невозможно, так как на малых скоростях, на которых выполняется маневрирование в процессе швартовки, такие лаги не работают. Повышение чувствительности относительных лагов к малым скоростям нецелесообразно, так как они не учитывают течения, наличие которого - явление достаточно характерное даже для закрытых бухт. Абсолютные же лаги измеряют с высокой точностью продольную и поперечную скорость относительно грунта, но в судовой системе координат, которая, хотя и ориентирована с помощью гирокомпаса в географических координатах, но для получения скорости относительно причала требует дополнительных расчетов, выполнить которые в процессе швартовки судоводитель не может из-за отсутствия времени.
Следует подчеркнуть и третий недостаток известного способа швартовки: это приближенное измерение угловой скорости судна. В процессе швартовки существует необходимость в маневрировании судна не только скоростью, но и курсом. При этом угловая скорость циркуляции определяется приближенно по изменению показаний репитера гирокомпаса, или более точно - по данным гиротахометра. Это дает возможность капитану или лоцману только косвенным путем определять приблизительную линейную скорость носовой и кормовой оконечности судна. При этом ось циркуляции может не совпадать с центром масс судна, особенно в случаях, когда швартовка производится с помощью буксиров. Таким образом одна из оконечностей судна будет двигаться к причалу быстрее, чем считает судоводитель, что может привести к ее удару о причал, т.е. серьезным последствиям.
Из отмеченных недостатков следует, что, несмотря на достаточно значительный имеющийся технический прогресс в судовождении, процесс швартовки судна до настоящего времени остается слабо оснащенным технически и до сих пор обеспечивается, в основном, мастерством, опытом и интуицией капитана. В настоящее время, когда тоннаж судов и, следовательно, их инерционность достигают гигантских величин, это обстоятельство является основным недостатком известного существующего способа, так как размеры и инерционные характеристики судна не позволяют с достаточной точностью определять его движение для своевременного принятия мер управления.
Известен способ лазерного измерения скорости и дальности, относящийся к использованию измерительной техники [Патент РФ №71792]. Его выполняют посредством измерителя, источника импульсного лазерного излучения, содержащего приемный канал с фотоприемником отраженного излучения, формирующие оптические системы и блок обработки информации. Измеритель дополнительно оснащают телевизионным каналом, включающим блок формирования видеосигнала с датчиком телевизионного изображения, блок обработки и управления и жидкокристаллический экран. При этом ось телевизионного канала совмещают с осью приемного канала. В качестве датчика телевизионного изображения применяют матрицу, построенную по технологии комплементарной структуры металл-оксид-полупроводник (КМРП-матрица). Известный способ лазерного измерения может быть использован в любой области, где необходимо измерять скорость движущегося объекта и расстояние до него.
Однако в судовых условиях известный лазерный измеритель необходимо устанавливать на верхней палубе, а ее возвышение над водой на современных судах, как известно, всегда значительно больше, чем высота пирса. Поскольку с помощью данного известного способа лазерного измерения можно получить только прямое расстояние и скорость объекта по этому же направлению, то с приближением судна к причалу, в особенности, если судно достаточно крупное, неизбежно увеличивается угол наклона луча относительно плоскости горизонта, при этом измерение расстояния и скорости происходит в направлении наклонного луча. Таким образом, возникает особенно опасная ситуация, когда измеренная по данному способу наклонная дистанция оказывается больше фактического кратчайшего расстояния, а измеренная скорость меньше горизонтальной скорости между объектами. Следовательно, на судне для обеспечения швартовки известный способ лазерного измерения скорости и дальности использовать нельзя, так как в нем не измеряют угол наклона луча относительно горизонтальной плоскости.
Известен способ лазерного измерения [Патент РФ №2082090] с использованием акселерометра, что позволяет измерять не только расстояние до объекта, но и угол наклона луча. Этот известный способ нашел широкое применение в областях, где существует необходимость в измерении размеров объектов, в частности их высоты. Однако, названный известный способ измерения не позволяет определять скорость объекта, что для судовых условий является недостатком, не позволяющим его использовать во время швартовки.
Известен, принятый за прототип способ использования лазерной швартовки судна - Berthing Aid System [European Patent 2574955 A1], предназначенный для повышения безопасности швартовых операций и исключения риска навала судна на причал. Данный способ при подходе судна к причалу выполняют посредством береговой подсистемы, которая содержит несколько стационарно расположенных вдоль береговой линии приемопередатчиков лазерного излучения с направлением лазерного луча к ватерлинии судна, модуль передачи данных, основной блок и интерфейс, включающий также и береговое информационное табло; и приемной судовой подсистемы, которая содержит модуль приема информационных данных, основной блок, пользовательский интерфейс. При этом, до сближения судна с объектом швартовки передают на капитанский мостик судна информацию о расстоянии до данного объекта швартовки носовой и кормовой оконечности борта судна, которую и используют при управлении судном с началом швартовной операции. Это выполняют таким образом, что информацию о сближении судна с причалом от приемо-передатчиков лазерного излучения, которыми оборудована причальная стенка морского порта, направляют на контроллер и в режиме реального времени передают работникам порта на соответствующий дисплей, а также и на причальное информационное табло, что позволяет персоналу пристани, и, посредством приемной судовой подсистемы, лоцманам и капитану подходящего судна своевременно корректировать движение судна и безопасно осуществлять его швартовку к причальной стенке. Примером апробации такого известного способа в Российской Федерации является порт Новороссийск. В 2002 г. в порту на причалы нефтерайона «Шесхарис» был внедрен в эксплуатацию способ лазерной швартовки крупнотоннажных судов, существенно повысивший точность измерения расстояний от борта швартуемого судна до причала [Росторгуева Н.Ю. Расширение возможностей информационного обеспечения швартовки с использованием системы лазерного контроля. (канд. дисс.). - Новороссийск, РИО МГА, 2010. 24 с.].
Основной недостаток данного известного способа состоит в том, что для судна он не является автономным и позволяет обеспечивать швартовные операции только к причалам, оборудованным данной измерительной системой. По этой причине швартовку к необорудованным (т.е. к многочисленным) причалам и берегам, а также к самим судам, находящимся в море, известный способ обеспечить не может.
Для передачи информации на судно об его положении и движении используют установленные на причале мониторы значительных размеров, с таким расчетом, чтобы информация была визуально видна от границы начала маневрирования по выполнению швартовки. Измерительная система, реализующая известный способ, рассчитана на работу в достаточно сложных погодных условиях. Однако во многих портах РФ, особенно в северных и дальневосточных морях, в зимнее время вследствие сильного снегопада возможно налипание снега на экран табло, что ухудшает прием информации на судне. Таким образом невозможность надежного получения достоверной информации вследствие особых погодных условий является вторым недостатком известного способа.
В данной известной измерительной системе предусмотрено дублирование передачи информации по радиосвязи. Однако здесь в силу вступает человеческий фактор, то есть возможны ошибки и неточности, могущие привести к аварийной ситуации. Следовательно, неполное исключение негативного влияния человеческого фактора является третьим недостатком данного способа.
К недостаткам известного способа относится и высокая стоимость табло, передающего информацию на судно.
Задачей, на решение которой направлен заявляемый способ, является устранение указанных недостатков, а именно создание такого способа использования лазерной швартовки судна, который является автономным, повышение его надежности и расширение видов передаваемой измеряемой информации практически независимо от погодных условий, а также удешевление всей используемой измерительной системы.
Поставленная задача достигается тем, что в известном способе швартовки судна с помощью лазерной системы, заключающегося в том, что подводят судно к объекту швартовки, до сближения с ним передают на капитанский мостик судна информацию о расстоянии до данного объекта швартовки носовой и кормовой оконечности борта судна, которую используют при управлении судном для выполнения швартовной операции, В ОТЛИЧИЕ ОТ НЕГО в заявляемом способе перед началом швартовной операции на верхней палубе судна в ее носовой и кормовой оконечностях устанавливают по одному лазерному измерителю, снабженному датчиком угла наклона лазерного луча, при этом каждый из данных лазерных измерителей встраивают в крепежное устройство, предварительно установленное непосредственно на фальшборте верхней палубы каждой из оконечностей судна.
При подходе судна к объекту швартовки наводят лазерный луч каждого лазерного измерителя на выбранную область объекта швартовки и запускают цикл измерения им расстояния до данного объекта, при котором устройством передачи-приема каждого лазерного измерителя излучают лазерные лучи и принимают соответственно отраженные. Одновременно датчиком угла наклона лазерного луча каждого лазерного измерителя определяют угол наклона лазерного луча к плоскости горизонта, путем излучения и приема лазерных лучей. Направляют из устройства передачи-приема и соответственно из датчика угла наклона лазерного луча каждого лазерного измерителя образующиеся в них электронные сигналы с их информацией в блок обработки информации, посредством которого получают отображенные на дисплее информационные данные соответственно о кратчайшем горизонтальном расстоянии от носа и кормы судна до объекта швартовки, вычисленную горизонтальную скорость их перемещения до данного объекта, а также и информационные данные о смоделированном положении судна относительно объекта швартовки, которые и используют при управлении судном с началом выполнения швартовной операции.
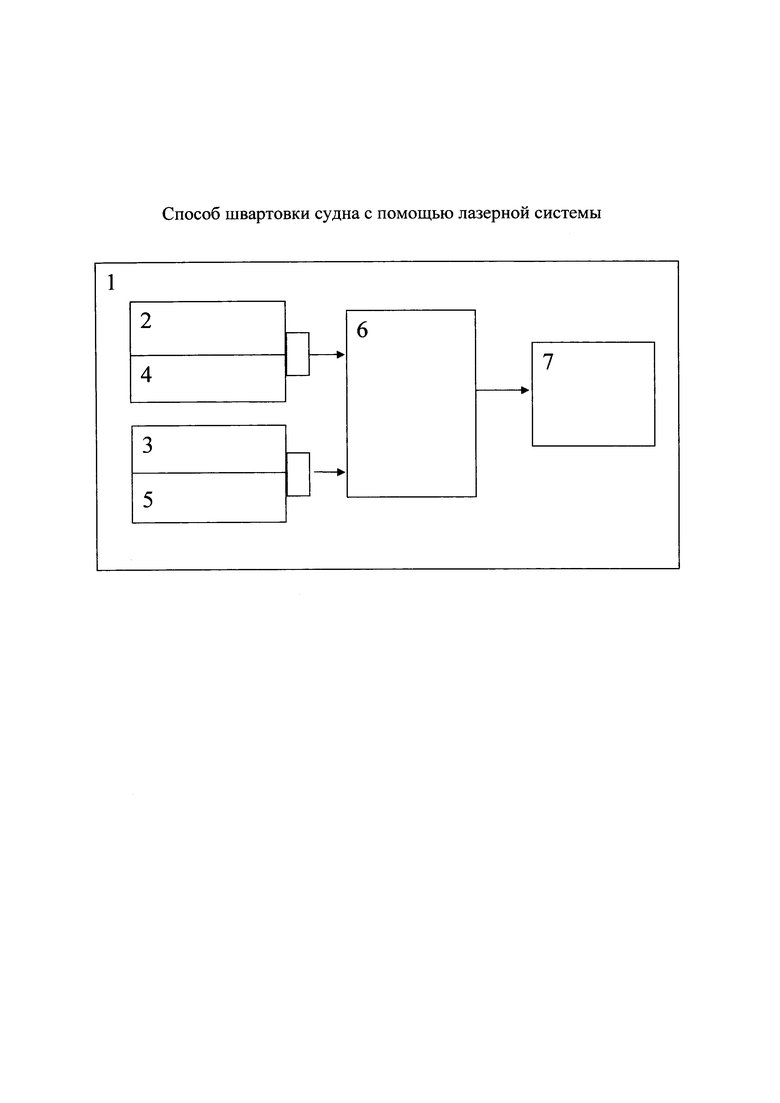
Совокупность элементов, связей между ними с выбором судна в качестве объекта их установки позволяют создать автономную систему безопасной лазерной швартовки к любым объектам швартовки. Благодаря наличию на оконечностях судна лазерных измерителей, каждый из которых снабжен датчиком угла наклона лазерного луча, информацию о движении и положении судна относительно объекта швартовки получают после обработки электронных сигналов непосредственно на судне, что повышает надежность ее использования и не требует на объекте швартовки дополнительного оборудования. Кроме того, для обработки получаемой от лазерных устройств можно использовать известную, уже существующую на судне аппаратуру (АИС, ЭКНИС), что дополнительно снижает стоимость системы лазерной швартовки, расширяет в совокупности виды измеряемой и передаваемой информации независимо от метеообстановки. Заявляемый способ поясняется чертежом, на котором представлены состав и схема устройства, реализующего заявленный способ лазерной швартовки судна на примере использования в качестве объекта швартовки причала морского порта.
Устройство 1, реализующее заявляемый способ швартовки судна, содержит два устройства передачи-приема - 2 и 3 каждого соответственно лазерного измерителя (не показаны), которые перед швартовкой судна устанавливают в носовой и кормовой оконечностях судна (не показаны) с помощью предварительно установленного крепежного приспособления (не показано) к фальшборту на верхней палубе судна (не показано). Каждое устройство передачи-приема 2 и 3 соответственно имеет свой датчик угла наклона лазерного луча 4 и 5 соответственно. Информацию от всех устройств передачи-приема 2 и 3 и датчиков угла наклона лазерного луча 4 и 5 в виде образующихся в них электронных сигналов направляют в блок обработки информации 6, посредством которого рассчитывают и получают отображенные на дисплее информационные данные о кратчайшем горизонтальном расстоянии и горизонтальной скорости носовой и кормовой оконечностей судна относительно объекта швартовки. Данную информацию передают на капитанский мостик на дисплей 7, где она высвечивается в воспринимаемом цифровом виде. По этим же данным на дисплее 7 высвечивается текущее положение судна относительно причала.
Способ осуществляют следующим образом. С подходом к порту необходимые данные о причале, предназначенном для данного судна, в меркаторской системе координат вводят в базу данных блока обработки информации 6. После подготовки швартовного оборудования третий и второй помощники капитана (далее оператор №1 и оператор №2 соответственно) устанавливают в носовой и кормовой оконечностях судна со стороны борта, которым осуществляется швартовка, на фальшборту посредством данного крепежного приспособления лазерные измерители с устройствами 2 и 3 передачи-приема соответственно каждого лазерного измерителя с датчиками угла наклона лазерного луча 4 и 5 соответственно, наводят лазерные лучи на выбранные точки причала (не показаны) и запускают цикл измерения им расстояния до причала. Причем параллельность лучей соблюдают благодаря наличию у каждого устройства передачи-приема 2 и 3 приставки в виде азимутальной шкалы (не показана), согласованной с диаметральной плоскостью судна (не показано) и установленной в верхней части каждого крепежного приспособления лазерных измерителей и их устройств передачи-приема 2 и 3 (не показано). При этом каждым из устройств передачи-приема 2 и 3 соответственно каждого лазерного измерителя излучают лазерные лучи и принимают соответственно отраженные. Одновременно каждым из датчиков угла наклона лазерного луча 4 и 5 соответственно каждого лазерного измерителя определяют угол наклона лазерного луча к плоскости горизонта, путем излучения и приема отраженных лазерных лучей. Принятую и обработанную информацию в виде электронного сигнала устройств передачи-приема 2 и 3 и датчиков угла наклона лазерного луча 4 и 5 направляют в блок обработки информации 6, использующий на судне известную аппаратуру АИС, ЭКНИС, где по измеренной наклонной дальности носовой оконечности lн [м] и кормовой оконечности lк [м] получают горизонтальную дальность по формулам:
l1=lн cosβ1,
l2=lк cosβ2
где l1 и l2 [м] - горизонтальные дальности, измеренные операторами №1 и №2 соответственно;
β1 и β2 [град] - углы наклона лазерных лучей, измеренные операторами №1 и №2 соответственно.
Горизонтальную скорость носовой части ν1 [м/с] и кормовой части ν2 [м/с] судна получают по формулам:
где νн и νк [м/с] - наклонные скорости, измеренные операторами №1 и №2 соответственно.
Сигналы, пропорциональные измеренным дальностям и скоростям оконечностей судна, поступают на дисплей капитанского мостика, на котором высвечиваются в воспринимаемом цифровом виде. Одновременно по измеренным дальностям от кормы и носа судна формируются информационные данные и картина текущего смоделированного расположения судна относительно причала. Полученные на капитанском мостике на дисплее данные используют при управлении судном с началом выполнения швартовной операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
| УСТРОЙСТВО ДЛЯ СТОЯНКИ СУДОВ В КАМЕРЕ ШЛЮЗА | 2024 |
|
RU2822933C1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2019 |
|
RU2723697C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| ШВАРТОВНЫЙ ЗАХВАТНЫЙ МОДУЛЬ (варианты) | 2023 |
|
RU2808875C1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| КОМПЛЕКС ДЛЯ ПЕРЕДАЧИ ЖИДКОГО ГРУЗА НА ТАНКЕР (ВАРИАНТЫ) | 2002 |
|
RU2200109C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Одноточечный рейдовый причал | 1989 |
|
SU1736831A1 |
Изобретение относится к средствам обеспечения безопасности маневрирования судов при подходе к причалу и может быть использовано для швартовки судов. Для швартовки судна с помощью лазерной системы (1) лазерные измерители расстояния (2) и (3) до объекта швартовки с устройствами передачи-приема устанавливают на оконечностях судна. Измерители имеют свой датчик угла наклона лазерного луча (4) и (5) соответственно. Информацию от всех данных устройств в виде их сигналов вводят в блок обработки информации (6), который рассчитывает и выдает на дисплей о горизонтальном расстоянии и горизонтальной скорости оконечностей судна, которые используют при подходе его к причалу. Достигается возможность повышения безопасности маневрирования и расширения видов передаваемой измеряемой информации. 1 з.п. ф-лы, 1 ил.
1. Способ швартовки судна с помощью лазерной системы, заключающийся в том, что подводят судно к объекту швартовки, до сближения с ним передают на капитанский мостик судна информацию о расстоянии до данного объекта швартовки носовой и кормовой оконечности борта судна, которую используют при управлении судном с выполнением швартовной операции, отличающийся тем, что перед началом швартовной операции на верхней палубе судна в ее носовой и кормовой оконечностях устанавливают по одному лазерному измерителю, снабженному датчиком угла наклона лазерного луча, при этом каждый из данных лазерных измерителей встраивают в крепежное устройство, предварительно установленное непосредственно на фальшборте верхней палубы каждой из оконечностей судна, при подходке судна к объекту швартовки наводят лазерный луч каждого лазерного измерителя на выбранную область объекта швартовки и запускают цикл измерения им расстояния до данного объекта и скорость судна относительно данного объекта, при котором устройством передачи-приема каждого лазерного измерителя излучают лазерные лучи и принимают соответственно отраженные, одновременно датчиком угла наклона лазерного луча каждого измерителя определяют угол наклона лазерного луча к плоскости горизонта, направляют из устройства передачи-приема и соответственно из датчика угла наклона лазерного луча каждого измерителя импульсы с их информацией в блок обработки информации, посредством которого получают информационные данные соответственно о кратчайшем расстоянии от носа и кормы судна до объекта швартовки, вычисленную скорость их перемещения до данного объекта, а также и информационные данные о смоделированном положении судна относительно объекта швартовки, которые и используют при управлении судном с началом выполнения швартовной операции.
2. Способ швартовки судна с помощью лазерной системы по п.1, отличающийся тем, что в качестве объекта швартовки используют стенку причала морского порта.
| US 5432515 A, 11.07.1995 | |||
| CN 102944878 A, 27.02.2013 | |||
| CN 103956076 A, 30.07.2014 | |||
| Прибор для получения мелких одиночных капель жидкости | 1949 |
|
SU84581A1 |
| УСТРОЙСТВО И УСТАНОВКА ДЛЯ СОЕДИНЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ДВУХ ЛЕКАРСТВЕННЫХ КАПСУЛ ПУТЕМ КЛЕЕВОГО СОЕДИНЕНИЯ | 2011 |
|
RU2574955C2 |

